
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Оптимизация контура скорости и расчет решающих цепей
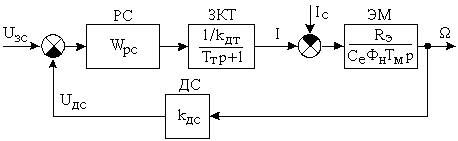
Рисунок 7 - Структурная схема контура скорости
На рисунке 7 представлена схема контура скорости. Её составляющие: - РС - регулятор скорости; - ЗКТ - замкнутый контур тока; - ЭМ - электромеханическая часть; - ДС - датчик скорости. По заданию контур скорости может быть астатическим с ПИ-регулятором, то есть двукратно интегрирующий или статический с П-регулятором. Для астатического контура настройку необходимо делать на симметричный оптимум (СО). Передаточная функция разомкнутого контура скорости при настройке на СО:
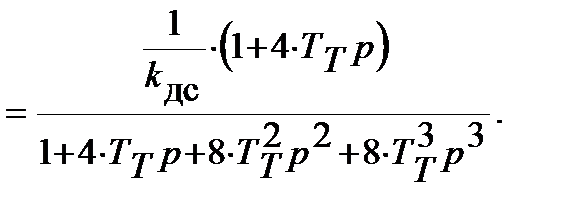
Передаточная функция регулятора скорости: где Передаточная функция замкнутого контура скорости:
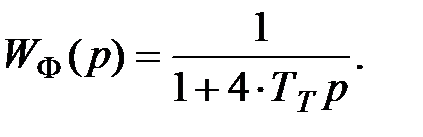
Переходный процесс, который будет иметь место при такой передаточной функции замкнутого контура скорости, нежелателен, поскольку имеет место большое перерегулирование (43.4%). Чтобы его уменьшить, необходимо на входе поставить фильтр, позволяющий избавиться от излишней форсировки : Передаточная функция оптимизированного на СО замкнутого контура скорости с фильтром на входе:
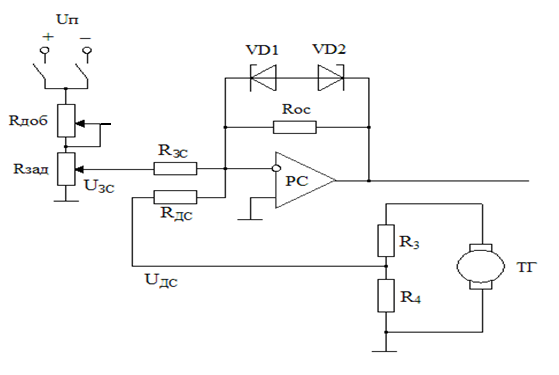
где Произведем расчет решающих цепей контура скорости. Схема контура скорости с ПИ-регулятором представлена на рисунке 8.
Рисунок 8 - Схема контура скорости с ПИ-регулятором. 1.Скорость холостого хода двигателя:
2.Коэффициент передачи датчика скорости:
3.Коэффициент усиления регулятора скорости найдем по формуле:
4.Примем ёмкость в цепи обратной связи регулятора скорости 5.Сопротивление резистора в цепи обратной связи регулятора скорости: 6.Сопротивление в цепи датчика скорости:
7. Сопротивление задания на скорость рассчитаем из условия установившегося режима:
где
Принимая
8.Ёмкость фильтра на входе: 9.Коэффициент делителя: 10.Величину сопротивления R4 принимаем равной 1 кОм Тогда величину сопротивления R3 находим как: 11.Напряжение стабилизации стабилитронов:
где
В данной курсовой работы суммарное сопротивление задатчика скорости принято равным Для статического контура скорости настройку необходимо делать на модульный оптимум. Передаточная функция разомкнутого контура скорости при настройке на МО: Передаточная функция регулятора скорости: где Передаточная функция замкнутого контура скорости:
Схема контура скорости с П-регулятором представлена на рисунке 9.
Рисунок 9 - Схема контура скорости с П-регулятором Расчет решающих цепей для П-регулятора: 1.Коэффициент регулятора скорости: 2.Коэффициент датчика скорости: 3.Скорость идеального холостого хода: 4.Резистор в цепи обратной связи РС принимаем: 5.Резистор датчика скорости: 6.Резистор задания на скорость находим из условия 7.Коэффициент делителя напряжений: 8.Коэффициент тахогенератора: 9.Резисторы делителя напряжения на выходе тахогенератора: 10.Напряжение стабилизации стабилитронов в цепи обратной связи РС:
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 234; Нарушение авторского права страницы


 - коэффициент регулятора скорости.
- коэффициент регулятора скорости. 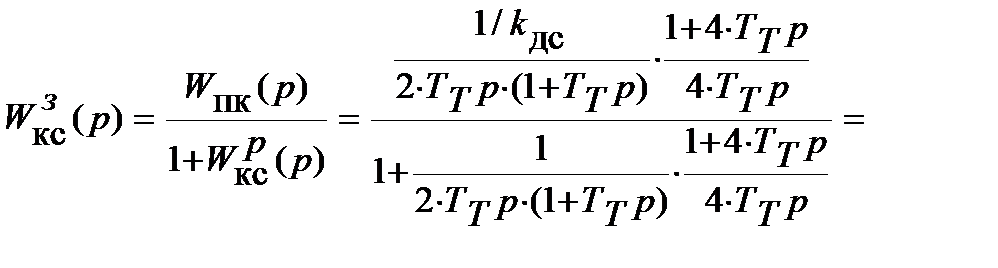

 с - эквивалентная постоянная времени контура скорости, настроенного на СО.
с - эквивалентная постоянная времени контура скорости, настроенного на СО.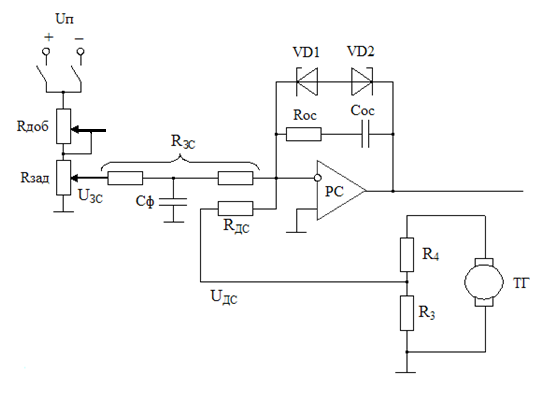

 мкФ.
мкФ. .
. 
 ,
,  - максимальное напряжение задания на скорость;
- максимальное напряжение задания на скорость; - максимальное выходное напряжение датчика скорости.
- максимальное выходное напряжение датчика скорости. В, получаем:
В, получаем:
 .
. 
 В,
В,  В - максимальное напряжение на выходе регулятора скорости;
В - максимальное напряжение на выходе регулятора скорости; В - падение напряжения на стабилитроне.
В - падение напряжения на стабилитроне. кОм. Так как
кОм. Так как  В, а напряжение питания
В, а напряжение питания  В, то необходимо добавить подстроечный резистор
В, то необходимо добавить подстроечный резистор  Ом на котором будет падение напряжения в 5 В.
Ом на котором будет падение напряжения в 5 В.



 ;
;  ;
;  ;
;  ;
;  ;
;  :
: ;
; ;
;  ;
;  ;
;  ;
;  ;
; 
 ;
; 