|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинетическая энергия твердого тела при различном движении.
1. Поступательное движение
2. Вращение тела вокруг неподвижной оси
где
3. Плоскопараллельное движение
где
Теорема об изменении кинетической энергии механической системы имеет две формы: дифференциальную и конечную (интегральную). Дифференциальная форма теоремы имеет вид
производная по времени от кинетической энергии системы равна сумме мощностей всех внешних и внутренних сил, действующих на точки системы. Соотношение (12.2) можно записать в виде
дифференциал кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на точки системы. Теорема об изменении кинетической энергии в конечной форме имеет вид
Изменение кинетической энергии на конечном перемещении системы из положения, в котором кинетическая энергия равна То, в положение, в котором кинетическая энергия равна Т, равно сумме работ всех внешних и внутренних сил системы на этом перемещении. Практическое применение соотношений при решении задач осложняется наличием в их правых частях членов, связанных с внутренними силами, которые, как правило, заранее неизвестны. Однако существует широкий класс систем, для которых упомянутые члены можно опустить: это системы, состоящие из совокупности абсолютно твердых тел, скрепленных между собой идеальными связями (шарниры без трения, нерастяжимые и абсолютно гибкие нити и т.д). Для таких систем (их называют неизменяемыми)
и соотношения (12.2)—(12.4) записываются в виде
Рассмотрим порядок составления дифференциального уравнения движения системы с одной степенью свободы с помощью теоремы об изменении кинетической энергии в дифференциальной форме: 1. Убедиться в том, что система имеет одну степень свободы. 2. Выбрать координату, относительно которой будет составляться дифференциальное уравнение движения: это, как правило, либо линейная величина (назовем ее для конкретности х), определяющая положение тела, движущегося поступательно, либо угловая величина (назовем ее 3. Записать теорему об изменении кинетической энергии. 4. Вычислить кинетическую энергию системы как сумму кинетических энергий тел, входящих в ее состав. На расчетной схеме показать все кинематические характеристики, от которых зависит кинетическая энергия системы. 5. Представить кинетическую энергию системы в виде 6. Вычислить производную по времени от кинетической энергии. 7. Изобразить на расчетной схеме внешние силы, действующие на систему. Вычислить сумму мощностей внешних сил. 8. Представить сумму мощностей внешних сил в виде 9. Сформировать дифференциальное уравнение движения. Для этого следует, согласно п. 3, приравнять правые части выражений, полученных в п. 6 и 8, и провести сокращение на производную по времени от координаты, присутствующую в качестве множителя в обеих частях уравнения. Если решается вторая задача динамики, т.е. определяется закон движения системы, то далее следует выполнить следующие действия: 10. Сформулировать начальные условия движения системы. 11. Построить общее решение дифференциального уравнения движения. 12. Определить по начальным условиям постоянные интегрирования. 13. Подставив значения постоянных интегрирования в общее решение дифференциального уравнения, найти закон движения системы. Б. Конечная форма теоремы Рассмотрим порядок решения задачи, предполагая, что система приходит в движение из состояния покоя: 1. Убедиться в том, что система имеет одну степень свободы. 2. Выбрать координату, с помощью которой будет определяться положение системы, связав выбор с целью задачи: если, например, определяется зависимость скорости тела, совершающего прямолинейное поступательное движение, то в качестве координаты принимается перемещение тела; если же определяется зависимость угловой скорости тела, вращающегося вокруг неподвижной, то в качестве координаты принимается угол поворота тела. Координаты следует отсчитывать от начального положения. 3. Записать теорему об изменении кинетической энергии в конечной форме, положив Т0 =0. 4. Изобразить на рисунке систему в конечном положении. Вычислить кинетическую энергию системы в конечном положении как сумму кинетических энергий тел, входящих в ее состав. На расчетной схеме показать все кинематические характеристики, от которых зависит кинетическая энергия системы. 5. Представить кинетическую энергию системы в виде 6. Изобразить на расчетной схеме внешние силы, действующие на систему; вычислить сумму работ внешних сил, представив ее либо в виде 7. Приравняв, согласно п. 3, правые части выражений, полученных в п. 5 и 6, определить из полученного соотношения искомую зависимость. Примеры решения задач Задача12.3.1. Груз 3 массы т3 поднимается лебедкой, приводящейся в движение электромоторомА (рис. 12.1). Передача движения от вала I на вал II осуществляется с помощью пары зубчатых колес 1 и 2. Трос, к концу которого прикреплен груз, наматывается на барабанВ радиуса r. Определить закон изменения угловой скорости вала I, если со стороны электромотора на вал действует вращающий момент
Рис. 12.1
Решение. Рассмотрим систему, состоящую из ротора электромотора D, лебедки и поднимаемого груза (рис. 12.2). Система имеет одну степень свободы, если тела, входящие в эту систему, абсолютно твердые, трос нерастяжимый, а раскачивание груза при подъеме отсутствует. Система является неизменяемой, если дополнительно положить, что трос является абсолютно гибким. Составим дифференциальное уравнение движения системы, приняв за координату, определяющую ее положение, угол поворота электромотора Воспользуемся теоремой об изменении кинетической энергии в дифференциальной форме
Рис. 12.2
Дальнейшая последовательность действий определяется структурой этой формулы. Вычислим кинетическую энергию системы как сумму кинетических энергий тел, входящих в ее состав,
Кинетическая энергия вала I (имеется в виду совокупность тел: вал лебедки с колесом 1, муфта, связывающая валы электромотора и лебедки (на рисунке не показана) и ротор электромотора), вращающегося с угловой скоростью
Кинетическая энергия вала II (имеется в виду совокупность тел: вал, барабан и колесо 2), вращающегося с угловой скоростью
Кинетическая энергия груза, движущегося поступательно со скоростью vз:
Подставляя (12.7)-(12.9) в формулу (12.6), получаем
Воспользуемся соотношением
Кроме того,
Подставим (12.11) и (12.12) в формулу (12.10). Поскольку отношение радиусов колес r1 и r2 можно заменить отношением чисел зубьев z1 и z2, то
Введем обозначение
и, учитывая, что
откуда
Вычислим теперь сумму мощностей внешних сил. Из внешних сил, действующих на рассматриваемую систему, на расчетной схеме показаны только силы, мощность которых не равна нулю, - это вращающий момент Таким образом,
или, учитывая (12.12), а также, что
Введем обозначение
Приравнивая, согласно (12.5), правые части соотношений (12.14) и (12.16), получаем после сокращения на
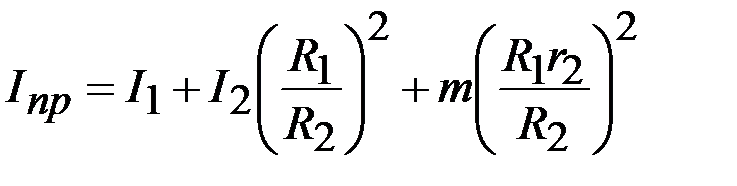
Поскольку приведенный момент инерции
Для определения закона изменения угловой скорости перепишем последнее уравнение в виде
Построим общее решение уравнения (12.19). Поскольку оно является неоднородным линейным дифференциальным уравнением первого порядка, то
где
Для определения функции
Частное решение уравнения (12.19) разыскиваем в виде
Для определения постояннойА следует подставить (12.22) в уравнение (12.19):
Таким образом, общее решение уравнения (12.19) имеет вид
Постоянную интегрированияС определим из начального условия
Подставляя найденное значение постояннойСв (12.23), получаем закон изменения угловой скорости первого вала
Из найденного решения следует, что по истечении некоторого промежутка времени первый вал будет вращаться с постоянной угловой скоростью
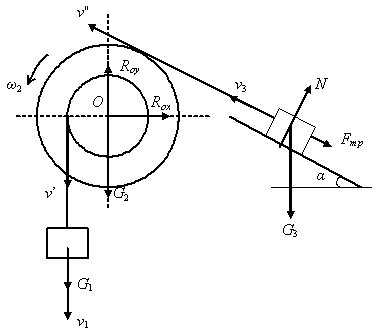
Задача 12.3.2. Груз 3 массы т3 перемещается по наклонной плоскости, образующей угол К колесу 1 приложен со стороны мотора постоянный вращающий момент М1 на валу колеса 2 действует постоянный момент сопротивления М2. Определить угловую скорость колеса 1 как функцию его угла поворота, если I1 - момент инерции ведущего вала (вал и колесо l); I2- момент инерции ведомого вала (вал, колесо 2 и барабан); f -коэффициент трения скольжения груза о наклонную плоскость. Трос считать нерастяжимым, невесомым и не сопротивляющимся изменению формы. Движение начинается из состояния покоя. Центры масс вращающихся тел находятся на осях вращения.
Рис. 12.3
Решение. Рассмотрим систему, состоящую из тел 1-3 и троса. Поскольку тела абсолютно твердые, а трос нерастяжимый, то система имеет одну степень свободы. Будем определять положение системы с помощью угла поворота
Определим приращение кинетической энергии системы на перемещении из начального положения в некоторое конечное, задаваемое углом
где
Рис. 12.4 Поскольку
то
или
где
Таким образом, приращение кинетической энергии системы на рассматриваемом перемещении найдено как функция угловой скорости ведущего вала в конечном положении:
Внешними силами, действующими на систему, являются вращающий момент М1 момент сопротивления М2, силы тяжести тел 1) работа вращающего момента равна 2) работа момента сопротивления равна 3) работы сил 4) работа силы 5) работа силы 6) работа силы трения равна ( Таким образом,
Но
поэтому
или
где
Приравнивая, согласно (12.25), правые части формул (12.26) и (12.27), получаем
откуда
Таким образом, искомая зависимость имеет вид:
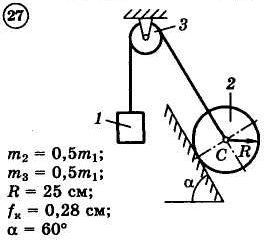
Задача 12.3.3. Механическая система под действием сил тяжести приходит в движение из состояния покоя. Учитывая трение скольжения тела 3, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость и ускорение тела 1 в тот момент, когда пройденный им путь станет равным s (рис. 3.70). В задаче принять:
Решение. На механическую систему действуют активные силы Задачу решим, применяя теорему об изменении кинетической энергии механической системы:
гдеТ и Для рассматриваемой системы, состоящей из абсолютно твердых тел, соединенных нерастяжимыми нитями,
Так как в начальном положении система покоилась, то
а) б)
Кинетическая энергия системы представляет собой сумму кинетических энергий тел 1, 2, 3
Кинетическая энергия груза 1, движущегося поступательно, равна:
Кинетическая энергия блока 2, совершающего вращение вокруг оси О z, перпендикулярной плоскости чертежа,
Кинетическая энергия тела 3 в его поступательном движении
Таким образом,
Выражение кинетической энергии содержит неизвестные скорости всех тел системы. Начать определение необходимо с Уравнения связей это не что иное, как кинематические соотношения между скоростями и перемещениями точек системы. При составлении уравнений связей выразим все неизвестные скорости и перемещения тел системы через скорость и перемещение груза 1. Скорость любой точки обода малого радиуса
Отсюда выразим угловую скорость тела 2
Вращательная скорость любой точки обода блока большого радиуса
Подставив значение угловой скорости, получим:
Проинтегрировав при начальных условиях выражения (а) и (б), запишем соотношение перемещений точек системы:
Зная основные зависимости скоростей точек системы, вернемся к выражению кинетической энергии и подставим в него уравнения (а) и (б):
Момент инерции тела 2 равен:
Подставляя значения масс тел и момента инерции тела 2, запишем
Определение суммы работ всех внешних сил системы на заданном перемещении.
Работа силы тяжести тела 1
Работа сил
Работа силы тяжести тела 3
Работа нормальной реакции тела 3 равна нулю, так как сила перпендикулярна направлению движения
Работа силы трения скольжения
так как
тогда
Сумма работ внешних сил
Подставляя значения масс тел, соотношения перемещений (в) и числовые параметры, запишем:
Теперь согласно теореме об изменении кинетической энергии механической системы приравняем значенияТ и
Скорость тела 1 получим из выражения (г)
Ускорение тела 1 можно определить, продифференцировав по времени равенство (г):
где Тогда
Задача 12.3.4. Механическая система под действием сил тяжести приходит в движение из состояния покоя; начальное положение системы показано на рисунках. Учитывая трение скольжения тела 1 и сопротивление качению тела 3, катящегося без скольжения, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s. Тело 2 и 3 считать сплошными однородными цилиндрами. Дано: Найти: Решение. Применим теорему об изменении кинетической энергии системы:
где Т0 и Т – кинетическая энергия системы в начальном и конечном положениях; Для рассматриваемых систем, состоящих из абсолютно твёрдых тел, соединенных нерастяжимыми нитями и стержнями,
Так как в начальном положении система находится в покое, то Т0 = 0.
Следовательно, уравнение (1) принимает вид Напишем кинематические соотношения между скоростями и перемещениями точек системы, т. е. уравнения связей, при этом перемещения и скорости тел выразим соответственно через скорости и перемещения груза 1. Скорость центра масс катка 3 равна скорости груза 1:
Угловая скорость катка 3, мгновенный центр скоростей которого находится в точке касания катка с плоскостью
Угловая скорость блока 2 Вычислим кинетическую энергию системы в конечном положении как алгебраическую сумму кинетических энергий тел 1, 2, 3:
Кинетическая энергия груза 1, движущегося поступательно,
Кинетическая энергия блока 2, вращающегося вокруг оси Ax:
Момент инерции блока 2 относительно оси Ax:
Подставляя выражения (5), (9) в формулу (8), получаем
Кинетическая энергия катка 3, совершающего плоское движение:
где
Подставляя (3), (4), (11) в формулу (10), получаем
Кинетическая энергия всей системы:
Найдём сумму работ всех внешних сил, приложенных к системе на заданном ее перемещении. Покажем внешние силы, приложенные к системе (рис.): для тела 1: Работа сил тяжести G 1 :
Работа силы трения скольжения Fтр:
Так как
то для катка 3: Работа силы тяжести G3 будет отрицательной, т.к. начальное положение катка выше, чем конечное
Работа силы сцепления катка Работа пары сил сопротивления качению катка 3:
где Так как каток катится без скольжения, то угол его поворота
где SC 3 – перемещение центра тяжести С3 катка 3. В нашем случае перемещение центра масс катка 3 будет равно перемещению центра масс груза 1, т.е. SC 3 = S = 2,4 м. Тогда работа пары сил сопротивления качению:
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (14) – (17):
Согласно теореме приравниваем значения
откуда
Вопросы для самоконтроля (защиты контрольной работы)
1. Что называется кинетической энергией материальной точки? 2. Напишите формулы для вычисления кинетической энергии твердого тела при поступательном, вращательном и плоском его движениях. 3. Как вычисляется работа силы упругости и силы тяжести? 4. Как определяется работа постоянной по модулю и направлению силы на прямолинейном перемещении? 5. Что называется мощностью силы? 6. Как определяется работа и мощность силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси? 7. Сформулируйте теорему об изменении кинетической энергии механической системы в дифференциальной форме (в форме мощностей). 8. Сформулируйте теорему об изменении кинетической энергии механической системы в конечной (интегральной) форме. Задания
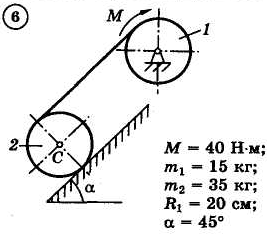
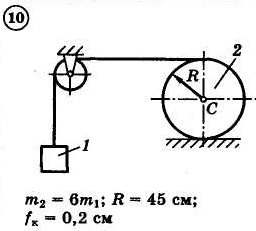
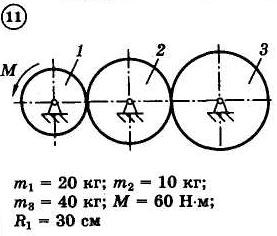
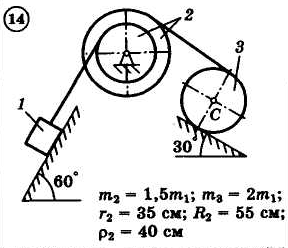
Для приведенных на схемах 1-30 механических систем, используя теорему об изменении кинетической энергии в интегральной форме, определить угловую скорость (варианты 4, 6, 7, 9, 11, 18, 25, 26, 28) или линейную скорость (остальные варианты) тела 1 после его заданного перемещения φ1 = 2π рад или s1 = 2 м. Движение начинается из состояния покоя.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 739; Нарушение авторского права страницы
 .
. ,
, - момент инерции тела относительно оси вращения.
- момент инерции тела относительно оси вращения. ,
, — момент инерции плоской фигуры относительно оси, проходящей через центр масс.
— момент инерции плоской фигуры относительно оси, проходящей через центр масс. , (12.2)
, (12.2) , (12.3)
, (12.3) . (12.4)
. (12.4) ,
, ,
,  ,
,  .
. , определяющая положение тела, вращающегося вокруг неподвижной оси.
, определяющая положение тела, вращающегося вокруг неподвижной оси. , если за координату принята линейная величина, или в виде
, если за координату принята линейная величина, или в виде  , если за координату принята угловая величина. Для этого скорости, входящие в выражение кинетической энергии системы, следует выразить либо через
, если за координату принята угловая величина. Для этого скорости, входящие в выражение кинетической энергии системы, следует выразить либо через  , либо через
, либо через  . Величины
. Величины  и
и  называют соответственно приведенной массой и приведенным моментом инерции системы.
называют соответственно приведенной массой и приведенным моментом инерции системы. , если за координату принята линейная величина, или в виде
, если за координату принята линейная величина, или в виде  , если за координату принята угловая величина.
, если за координату принята угловая величина. , если определяется зависимость v = v(x), или в виде
, если определяется зависимость v = v(x), или в виде  , если определяется зависимость
, если определяется зависимость  . Для этого скорости, входящие в выражение кинетической энергии системы, следует выразить либо через v, либо через
. Для этого скорости, входящие в выражение кинетической энергии системы, следует выразить либо через v, либо через  .
. , либо в виде
, либо в виде  .
. , где М0 и а - положительные постоянные, характеризующие мотор;
, где М0 и а - положительные постоянные, характеризующие мотор;  - угловая скорость вала I (электромотора). Числа зубьев колес z1 и z2, моменты инерции валов лебедки I1 и I2. Сопротивлением движению и массой троса пренебречь.
- угловая скорость вала I (электромотора). Числа зубьев колес z1 и z2, моменты инерции валов лебедки I1 и I2. Сопротивлением движению и массой троса пренебречь.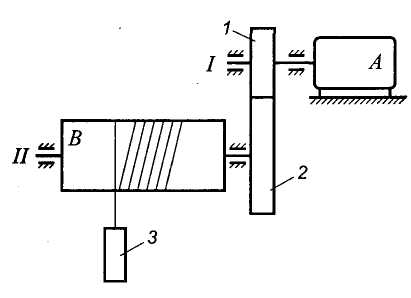
 .
. . (12.5)
. (12.5)
 . (12.6)
. (12.6) :
: . (12.7)
. (12.7) :
: . (12.8)
. (12.8) . (12.9)
. (12.9) . (12.10)
. (12.10) , выражающим равенство скоростей точек на ободах зубчатых колес; из него находим
, выражающим равенство скоростей точек на ободах зубчатых колес; из него находим . (12.11)
. (12.11) , или, с учетом формулы (12.11),
, или, с учетом формулы (12.11), . (12.12)
. (12.12) . (12.13)
. (12.13) .
. , получаем
, получаем ,
, . (12.14)
. (12.14) и сила тяжести
и сила тяжести  груза. Точки приложения других внешних сил (силы тяжести валов I и II со всеми деталями, силы тяжести муфты, ротора электромотора, реакций подшипников) неподвижны, поэтому мощность этих сил равна нулю. Мощность момента равна
груза. Точки приложения других внешних сил (силы тяжести валов I и II со всеми деталями, силы тяжести муфты, ротора электромотора, реакций подшипников) неподвижны, поэтому мощность этих сил равна нулю. Мощность момента равна  , мощность силы тяжести груза
, мощность силы тяжести груза 
 ,
, получаем
получаем . (12.15)
. (12.15) , тогда
, тогда . (12.16)
. (12.16) , дифференциальное уравнение движения системы:
, дифференциальное уравнение движения системы: . (12.17)
. (12.17) является постоянным, а силовой момент
является постоянным, а силовой момент  - функция угловой скорости
- функция угловой скорости  . (12.18)
. (12.18) . (12.19)
. (12.19) . (12.20)
. (12.20) - общее решение однородного уравнения
- общее решение однородного уравнения  ;
;  - частное решение неоднородного уравнения (12.19).
- частное решение неоднородного уравнения (12.19). запишем характеристическое уравнение
запишем характеристическое уравнение  и найдем его корень
и найдем его корень  . Следовательно,
. Следовательно, . (12.21)
. (12.21) . (12.22)
. (12.22) .
. . (12.23)
. (12.23) :
: .
. . (12.24)
. (12.24) .
. с горизонтом, электрической лебедкой, состоящей из зубчатого колеса 1 радиуса R1 и находящегося с ним в зацеплении колеса 2 радиуса R2, на одном валу с которым находится барабан радиуса r2, на который навивается трос, прикрепленный к грузу (рис. 12.3).
с горизонтом, электрической лебедкой, состоящей из зубчатого колеса 1 радиуса R1 и находящегося с ним в зацеплении колеса 2 радиуса R2, на одном валу с которым находится барабан радиуса r2, на который навивается трос, прикрепленный к грузу (рис. 12.3).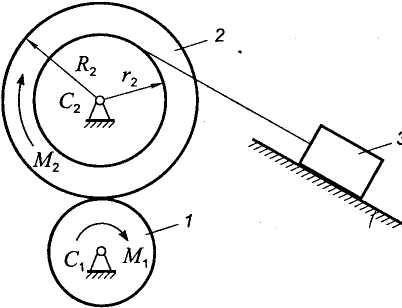
 ведущего вала. Заметим также, что система является неизменяемой. Поскольку движение системы происходит под действием постоянных сил, работу которых можно вычислить, не зная закона движения системы, то для решения задачи удобно использовать теорему об изменении кинетической энергии в конечной форме для неизменяемых систем
ведущего вала. Заметим также, что система является неизменяемой. Поскольку движение системы происходит под действием постоянных сил, работу которых можно вычислить, не зная закона движения системы, то для решения задачи удобно использовать теорему об изменении кинетической энергии в конечной форме для неизменяемых систем . (12.25)
. (12.25) . Кинетическая энергия системы в начальном положении Т0= 0 (по условию). Кинетическая энергия системы в конечном положении равна сумме кинетических энергий ведущего и ведомого валов и груза:
. Кинетическая энергия системы в начальном положении Т0= 0 (по условию). Кинетическая энергия системы в конечном положении равна сумме кинетических энергий ведущего и ведомого валов и груза: ,
, - угловая скорость ведущего и ведомого валов соответственно; v3 - скорость груза (рис. 12.4).
- угловая скорость ведущего и ведомого валов соответственно; v3 - скорость груза (рис. 12.4).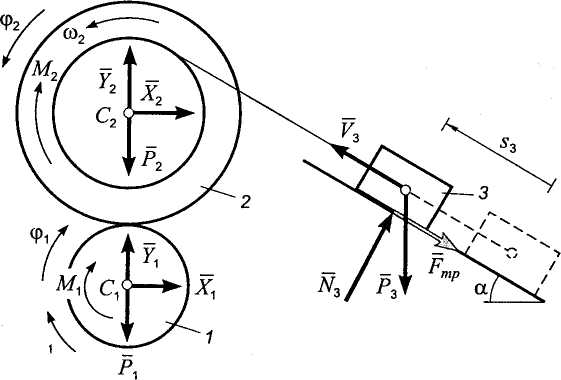
 ,
, ,
, ,
, .
. . (12.26)
. (12.26) , реакции подшипников ведущего вала
, реакции подшипников ведущего вала  , реакции подшипников ведомого вала
, реакции подшипников ведомого вала  и реакции плоскости: сила трения
и реакции плоскости: сила трения  и нормальная реакция
и нормальная реакция  . Вычислим теперь работу внешних сил на перемещении системы из начального положения в конечное:
. Вычислим теперь работу внешних сил на перемещении системы из начального положения в конечное: ;
; , где
, где  -угол поворота ведомого вала;
-угол поворота ведомого вала; , а также
, а также  , равны нулю, так как эти силы приложены в неподвижных точках;
, равны нулю, так как эти силы приложены в неподвижных точках; равна нулю, так как эта сила перпендикулярна перемещению точки ее приложения;
равна нулю, так как эта сила перпендикулярна перемещению точки ее приложения; равна
равна  , где s3 - перемещение груза;
, где s3 - перемещение груза; ), где
), где  .
. .
. ,
, .
. , (12.27)
, (12.27) .
. ,
, . (12.28)
. (12.28) .
.
 ,
,  ,
,  . Применяя принцип освобождения от связей системы, покажем реакции шарнирно-неподвижной опоры 2 и шероховатой наклонной поверхности. Направления скоростей тел системы изобразим с учетом того, что тело 1 спускается.
. Применяя принцип освобождения от связей системы, покажем реакции шарнирно-неподвижной опоры 2 и шероховатой наклонной поверхности. Направления скоростей тел системы изобразим с учетом того, что тело 1 спускается. ,
, – кинетическая энергия системы в начальном и конечном положениях;
– кинетическая энергия системы в начальном и конечном положениях;  - алгебраическая сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное;
- алгебраическая сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное;  - сумма работ внутренних сил системы на том же перемещении.
- сумма работ внутренних сил системы на том же перемещении. .
. . Следовательно,
. Следовательно, .
.
 .
. .
. .
. .
. .
. . Избавимся от лишних неизвестных, составив уравнения связей.
. Избавимся от лишних неизвестных, составив уравнения связей. равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения r
равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения r .
. . (а)
. (а) , с одной стороны, равна произведению угловой скорости блока и радиуса вращения, а с другой – скорости тела 3
, с одной стороны, равна произведению угловой скорости блока и радиуса вращения, а с другой – скорости тела 3 .
. . (б)
. (б) . (в)
. (в) .
. .
. .
. .
. .
. равна нулю, так как эти силы приложены к неподвижной точке.
равна нулю, так как эти силы приложены к неподвижной точке. .
. .
. .
. ,
, ,
, .
. .
.

 . (г)
. (г) .
. ,
, .
. .
. – масса груза 1,
– масса груза 1,  ,
,  ,
,  м,
м,  ,
,  , коэффициент трения скольжения
, коэффициент трения скольжения  , коэффициент трения качения
, коэффициент трения качения  см,
см,  м. На рис. показана механическая схема в начальном положении.
м. На рис. показана механическая схема в начальном положении. – скорость груза 1 в конечном положении.
– скорость груза 1 в конечном положении. (1)
(1) - сумма работ внешних сил, приложенных к системе, на перемещение системы из начального положения в конечное;
- сумма работ внешних сил, приложенных к системе, на перемещение системы из начального положения в конечное; - сумма работ внутренних сил системы на том же перемещении.
- сумма работ внутренних сил системы на том же перемещении.

 (2)
(2) . (3)
. (3) . (4)
. (4) . (5)
. (5) . (6)
. (6) . (7)
. (7) . (8)
. (8) . (9)
. (9) .
. , (10)
, (10) - момент инерции катка 3 относительно его продольной центральной оси
- момент инерции катка 3 относительно его продольной центральной оси  :
:  . (11)
. (11) . (12)
. (12) . (13)
. (13)
 (14)
(14) .
. ,
, . (15)
. (15) . (16)
. (16) , т.к. сила приложена в мгновенном центре скоростей катка.
, т.к. сила приложена в мгновенном центре скоростей катка.
 - момент пары сил сопротивления качению катка 3;
- момент пары сил сопротивления качению катка 3;  - угол поворота катка 3.
- угол поворота катка 3.
 (17)
(17)
 и
и 
 ,
, .
.