|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Базовые понятия теории и методические
рекомендации по решению задач
При движении механической системы в каждый момент времени сумма элементарных работ активных сил и сил инерции на любом возможном перемещении системы равна нулю, т.е.
где Уравнение (13.1) называют общим уравнением динамики, так как из него при различных дополнительных предположениях могут быть получены дифференциальные уравнения движения механической системы, общие теоремы динамики и т.п. В координатной форме уравнение (13.1) записывается в виде
где F kx , F ky , Fkz - проекции активных сил на координатные оси; Задачи с помощью общего уравнения динамики рекомендуется решать в следующем порядке: 1. Определить число степеней свободы s рассматриваемой системы. 2. Выбрать независимые величины 3. Изобразить на рисунке активные (задаваемые) силы и реакции неидеальных связей. 4. Приложить к телам (массам) системы силы инерции, направив их в сторону, противоположную соответствующим ускорениям 5. Сообщить одной из точек системы возможное перемещение, изобразив его на расчетной схеме: а) если в качестве обобщенной координаты выбрана линейная величина, то возможное перемещение следует сообщить той точке системы, положение которой определяет эта координата; б) если в качестве обобщенной координаты принята угловая величина, то возможное перемещение следует сообщить тому телу, положение которого определяет эта координата; 6. Изобразить на расчетной схеме векторы возможных перемещений точек приложения сил, указанных в п. 3 и 4. 7. Составить общее уравнение динамики; для этого следует вычислить и приравнять нулю сумму элементарных работ активных сил, реакций неидеальных связей и сил инерции на возможном перемещении системы. 8. Подставить в уравнение п. 7 формулы для сил инерции из п. 4. 9. Выразить возможные перемещения точек приложения сил через возможное перемещение, соответствующее выбранной координате системы. 10. Выразить ускорения точек приложения сил через обобщенное ускорение (вторую производную от обобщенной координаты по времени). 11. Подставив формулы, полученные в п. 9 и 10, в уравнение п. 8, получить после простых преобразований дифференциальное уравнение движения системы. 12. Дальнейшие действия зависят от цели, поставленной в задаче: б) если требуется найти закон движения системы, то далее следует проинтегрировать полученное дифференциальное уравнение при заданных начальных условиях; в) если в задаче требуется определить ускорение какой-либо точки или угловое ускорение какого-либо тела (такая задача, как правило, ставится для систем, движущихся под действием постоянных сил), то искомую величину легко найти из полученного дифференциального уравнения.
Примеры решения задач Задача 8.2.1. Составить дифференциальное уравнение движения механической системы, состоящей из груза 1, блока 2 и катка 3, имеющих соответственно массы т1, т2, т3, и пружины с коэффициентом жесткости с (рис. 13.1). Груз и каток, расположенные на наклонных плоскостях, составляющих с горизонтом углы Решение. Рассматриваемая система имеет одну степень свободы при выполнении следующих условий: 1. Тела, входящие в систему, абсолютно твердые. 2. Нить нерастяжимая и при движении системы всегда натянута. 3. Проскальзывание нити на блоке отсутствует. 4. Каток катится без скольжения.
Рис. 13.1
Будем определять положение системы с помощью координаты х, направив соответствующую осьОх параллельно наклонной плоскости, на которой расположен груз. Начало оси совместим с положением центра масс груза при равновесии системы (рис. 13.2). Пусть
где Для составления дифференциального уравнения движения воспользуемся общим уравнением динамики. Построим расчетную схему задачи. Изобразим на рисунке активные силы
Рис. 13.2
Груз движется поступательно. Силы инерции его частиц эквивалентны равнодействующей
приложенной в центре масс ( Блок вращается вокруг главной центральной оси инерции. Силы инерции его частиц эквивалентны паре сил с моментом
где Вектор Каток совершает плоское движение. Силы инерции его частиц эквивалентны системе, состоящей из одной силы
приложенной в центре масс катка (
где Сообщим грузу возможное перемещение Запишем общее уравнение динамики
Заметим, что элементарная работа силы Подставив в уравнение (13.8) формулы (13.4)-(13.7) и раскрыв скалярные произведения, получим
Используя формулы (13.3), находим
Подставляя формулы (13.10) и (13.11) в уравнение (13.9), находим после сокращения на
Из уравнения (13.12) легко получить условие равновесия системы. Действительно, поскольку
где
С учетом условия (13.14) уравнение (13.12) принимает вид
Назовем приведенной массой и приведенной жесткостью величины
Тогда дифференциальное уравнение (13.15) можно записать в виде
где
Задача 8.2.2. Груз 3 массы т3 поднимается с помощью устройства, состоящего из шкивов 1 и 2, связанных невесомым ремнем (рис. 13.3). К ведущему шкиву 1 радиуса R1 приложена пара сил с постоянным моментом М. Определить угловое ускорение ведущего шкива, если R2, r2 - радиусы ступеней ведомого шкива; I1 и I2 - моменты инерции шкивов относительно осей их вращения. Сопротивлением и массой троса пренебречь.
Рис. 13.3
Решение. Рассматриваемая механическая система имеет одну степень свободы, если выполняются следующие условия: 1. Тела 1, 2, 3 - абсолютно твердые. 2. Ремень и трос нерастяжимые. 3. Проскальзывание ремня на шкивах отсутствует. 4. Груз поднимается, не раскачиваясь (по направляющим). Построим расчетную схему задачи. Связи, наложенные на систему, являются идеальными. Поэтому на расчетной схеме (рис. 13.4) показаны только активные силы (вращающий момент и силы тяжести тел) и силы инерции.
Рис. 13.4
Шкив 1 вращается вокруг своей главной центральной оси инерции. Поэтому система сил инерции его частиц эквивалентна паре сил, момент которой направлен противоположно угловому ускорению шкива
Шкив 2 также вращается вокруг своей главной центральной оси инерции. Поэтому система сил инерции его частиц эквивалентна паре сил, момент которой направлен противоположно угловому ускорению шкива
Груз движется поступательно. Система сил инерции частиц груза эквивалентна равнодействующей силе, которая приложена в центре масс, направлена противоположно его ускорению и имеет величину
Сообщим шкиву 1 возможное перемещение
Нетрудно установить, что
Подставив формулы (13.17)-(13.19), (13.22) в уравнение (13.20), получим, с учетом (13.21), уравнение
из которого, после сокращения на
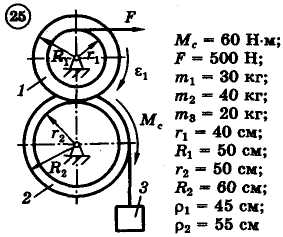
Задача 13.2.3. Для заданной механической системы определить ускорение груза 1, к которой прикреплен груз. Массами нитей пренебречь. Система движется из состояния покоя. Считать, что
Рис 1 Решение. 1. Составление расчетной схемы. На механическую систему действуют активные силы
Рис. 2
Так как система пришла в движение из состояния покоя, то ускорения точек системы 1 направлены в сторону движения. Приложим силы инерции. Тела 1 и 3 движутся поступательно, силы инерции этих тел выражаются векторами
и показываются на расчетной схеме противоположно ускорениям. Силы инерции блока 2, вращающегося вокруг неподвижной оси Oz с угловым ускорением
и изображается на схеме в сторону противоположную 2. Выбор теоремы. Применим общее уравнение динамики
Произведение силы, перемещения точки приложения силы и косинуса угла, который образуют сила и направление движения, представляет собой работу силы на данном перемещении. Работа силы на заданном перемещении равна нулю, если точка приложения силы неподвижна или сила перпендикулярна направлению движения. 3. Составление уравнения.
где Уравнения связей. В общее уравнение динамики входят неизвестные перемещения. Выразим скорости центров масс и угловую скорость тел системы через скорость тела 1. Зависимости между возможными перемещениями такие же, как и между соответствующими скоростями. Скорость любой точки обода блока малого радиуса
отсюда
Вращательная скорость любой точки обода блока большого радиуса
Подставляя значение угловой скорости, получим
Проинтегрируем при нулевых начальных условиях равенство (2) и (3) и получим соотношения возможных перемещений точек системы
Подставим полученные возможные перемещения в (1) и произведем замену
Поделив обе части равенства на
Модули силы инерции: тела 1 Момент пары сил инерции
Связь между ускорениями точек системы получим, продифференцировав по времени уравнения (2) и (3)
Тогда силы инерции точек системы запишутся
Момент инерции блока
Тогда
Сила трения скольжения
В выражение (4) подставим значения сил инерции, силы трения и учитывая, что
4. Определение неизвестных.
Откуда
Окончательно
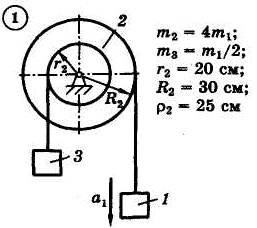
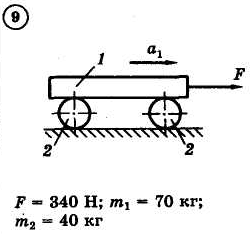
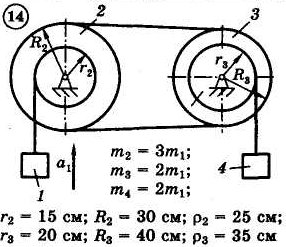
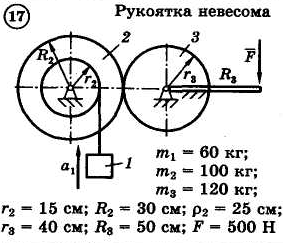
Задания
Для приведенных на схемах 1-30 механических систем определить указанное на схеме угловое ускорение или линейное ускорение. Нити невесомы и нерастяжимы. Принятые обозначения: т — массы тел, R и r — радиусы, ρ — радиус инерции (если он не указан, тело считать однородным цилиндром); при наличии трения указываются: f — коэффициент трения скольжения, fк — коэффициент трения качения.
Вопросы для самоконтроля (защиты контрольной работы)
1. Что называется возможным перемещением материальной точки? 2. Что называют возможными перемещениями механической системы? 3. Какие связи называются идеальными? 4. Что называется обобщенными координатами механической системы? 5.Сущность принципа Даламбера для механической системы. 6 Сущность принципа возможных перемещений. 7.Сущность общего уравнения динамики.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 515; Нарушение авторского права страницы
 , (13.1)
, (13.1) - активные силы,
- активные силы,  - силы инерции.
- силы инерции. , (13.2)
, (13.2) ,
,  ,
,  - проекции сил инерции;
- проекции сил инерции;  ,
,  ,
,  - вариации координат точек приложения сил.
- вариации координат точек приложения сил. (обобщенные координаты), с помощью которых можно однозначно задать положение системы, т.е. назначить параметры, относительно которых будут составляться дифференциальные уравнения движения.
(обобщенные координаты), с помощью которых можно однозначно задать положение системы, т.е. назначить параметры, относительно которых будут составляться дифференциальные уравнения движения. и
и  , связаны невесомой и нерастяжимой нитью, перекинутой через блок. Трением груза о плоскость, массой пружины и сопротивлением качению пренебречь. Проскальзывание нити на блоке отсутствует. Каток катится без скольжения. Блок считать однородным цилиндром, момент инерции катка относительно центральной оси равен
, связаны невесомой и нерастяжимой нитью, перекинутой через блок. Трением груза о плоскость, массой пружины и сопротивлением качению пренебречь. Проскальзывание нити на блоке отсутствует. Каток катится без скольжения. Блок считать однородным цилиндром, момент инерции катка относительно центральной оси равен  , радиусы ступеней катка R и r.
, радиусы ступеней катка R и r.
 ,
,  и
и  - соответствующие координате х углы поворота блока и катка и смещение центра масс катка от положения его равновесия.
- соответствующие координате х углы поворота блока и катка и смещение центра масс катка от положения его равновесия. (13.3)
(13.3) - радиус блока.
- радиус блока. ,
,  ,
,  , реакцию неидеальной связи (пружины)
, реакцию неидеальной связи (пружины)  ; приложим к телам системы силы инерции.
; приложим к телам системы силы инерции.
 , (13.4)
, (13.4) - ускорение груза).
- ускорение груза). , (13.5)
, (13.5) - момент инерции блока относительно оси вращения.
- момент инерции блока относительно оси вращения. направлен по оси вращения блока противоположно вектору углового ускорения
направлен по оси вращения блока противоположно вектору углового ускорения  . На расчетной схеме это отражено дуговыми стрелками противоположного направления.
. На расчетной схеме это отражено дуговыми стрелками противоположного направления. , (13.6)
, (13.6) - ускорение центра масс), и пары сил с моментом
- ускорение центра масс), и пары сил с моментом , (13.7)
, (13.7) - угловое ускорение катка.
- угловое ускорение катка. . Возможным перемещением блока является поворот на угол
. Возможным перемещением блока является поворот на угол  вокруг собственной оси. Возможным перемещением катка является поворот на угол
вокруг собственной оси. Возможным перемещением катка является поворот на угол  вокруг оси, проходящей через мгновенный центр скоростей Р3 перпендикулярно плоскости рисунка. Векторы
вокруг оси, проходящей через мгновенный центр скоростей Р3 перпендикулярно плоскости рисунка. Векторы  направлены по соответствующим осям, на расчетной схеме направления возможных поворотов блока и катка показаны дуговыми стрелками.
направлены по соответствующим осям, на расчетной схеме направления возможных поворотов блока и катка показаны дуговыми стрелками. . (13.8)
. (13.8) . (13.9)
. (13.9) (13.10)
(13.10) (13.11)
(13.11) и простых преобразований:
и простых преобразований: (13.12)
(13.12) , (13.13)
, (13.13) - статическая деформация пружины, то, подставляя (13.13) в уравнение (13.12) и имея в виду, что при равновесии x = 0,
- статическая деформация пружины, то, подставляя (13.13) в уравнение (13.12) и имея в виду, что при равновесии x = 0,  = 0, находим
= 0, находим . (13.14)
. (13.14) (13.15)
(13.15)
 .
. , (13.16)
, (13.16) .
.

 и имеет величину
и имеет величину . (13.17)
. (13.17) и имеет величину
и имеет величину . (13.18)
. (13.18) . (13.19)
. (13.19) . Шкив 2 и груз 3 получат при этом возможные перемещения
. Шкив 2 и груз 3 получат при этом возможные перемещения  и
и  соответственно. Запишем общее уравнение динамики
соответственно. Запишем общее уравнение динамики . (13.20)
. (13.20) , (13.21)
, (13.21) . (13.22)
. (13.22) .
. находим
находим .
. ,
,  ,
,  ,
,  ,
,  см,
см,  , f= 0,1 (рис. 1).
, f= 0,1 (рис. 1).
 ,
,  ,
,  . Применяя принцип освобождаемости от связей к внешним связям, покажем
. Применяя принцип освобождаемости от связей к внешним связям, покажем  ,
,  , N. Силу трения
, N. Силу трения  изобразим в сторону, противоположную предполагаемую направлению движения.
изобразим в сторону, противоположную предполагаемую направлению движения.

 , приводятся к паре, момент которой равен
, приводятся к паре, момент которой равен
 .
. .
. , (1)
, (1) - возможное перемещение тела 1,
- возможное перемещение тела 1,  - угол поворота блока 2,
- угол поворота блока 2,  -возможное перемещение центра масс тела 3 по направлению скорости,
-возможное перемещение центра масс тела 3 по направлению скорости,  -высота, на которую поднимется центр масс тела 3 при перемещении на
-высота, на которую поднимется центр масс тела 3 при перемещении на  .
. равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения
равна скорости тела 1, а также произведению угловой скорости тела 2 и радиуса вращения  .
. ,
, . (2)
. (2) с одной стороны, равна произведению угловой скорости блока
с одной стороны, равна произведению угловой скорости блока  и радиуса вращения R, а с другой - скорости тела 3.
и радиуса вращения R, а с другой - скорости тела 3. .
. . (3)
. (3) .
. .
.
 запишем
запишем
 ; тела 2
; тела 2  .
. .
. .
. .
. .
. .
. .
. ,
,  запишем
запишем .
. .
. .
.