|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Д–14. Исследование движения механической системы с применением уравнений Лагранжа второго рода⇐ ПредыдущаяСтр 17 из 17
14.1.Цель: освоить один из основных методов составления дифференциальных уравнений движения механических систем - метод уравнений Лагранжа второго рода. 14.2. Базовые понятия теории и методические рекомендации по решению задач
Дифференциальные уравнения движения голономной механической системы в обобщенных координатах, или уравнения Лагранжа второго рода, имеют вид:
где Т- кинетическая энергия системы; При составлении уравнений Лагранжа второго рода обычно используются различные способы вычисления обобщенных сил. Первый способ основан на определении обобщенной силы
Для вычисления обобщенной силы
откуда
Второй способ пригоден в случае, если система находится в потенциальном поле сил:
причем, потенциальная энергия системы должна быть выражена как функция обобщенных координат. Основное назначение уравнений Лагранжа второго рода - составление дифференциальных уравнений движения механической системы, подчиненной идеальным удерживающим голономным связям. Если среди связей, наложенных на систему, имеются неидеальные, то реакции этих связей следует ввести в число активных сил. Составление дифференциальных уравнений движения с помощью уравнений Лагранжа второго рода рекомендуется проводить в следующем порядке: 1. Определить число степеней свободы и выбрать обобщенные координаты. 2. Записать уравнения Лагранжа (14.1) с учетом выбранных обобщенных координат. 3. Вычислить кинетическую энергию системы как функцию обобщенных координат и обобщенных скоростей. 4. Найти производные от кинетической энергии, входящие в левую часть уравнений Лагранжа. 5. Найти обобщенные силы. 6. Подставить результаты, полученные в п. 4 и 5, в уравнения п.2. Если в задаче требуется найти уравнения движения системы, то следует проинтегрировать полученную систему дифференциальных уравнений движения, определив постоянные интегрирования по начальным условиям.
Примеры решения задач Задача 14.3.1. К нижнему шкиву 3 подъемника (рис.14.1) приложен постоянный вращающий момент М. Определить ускорение груза 1 массы т1, поднимаемого вверх, если масса противовеса 2 равна т2, шкивы 3 н 4 массы т3 каждый представляют собой однородные цилиндры радиуса r. Массой ремня и трением в подшипниках шкивов пренебречь.
Рис. 14.1Рис. 14.2
Решение. Система имеет одну степень свободы, если тела, входящие в систему, считать абсолютно твердыми, ремень нерастяжимым, а проскальзывание ремня на шкивах отсутствующим. При этих предположениях положение системы вполне определяется углом поворота
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, входящих в ее состав,
Так как тела 1 и 2 движутся поступательно, а тела 3 и 4 совершают вращательное движение, то
где Таким образом,
Запишем выражение (14.3) в обобщенных координатах. Заметив, что
получаем после подстановки последних формул в (14.3):
Таким образом, в рассматриваемом случае кинетическая энергия системы является функцией только обобщенной скорости. Вычислим производные от кинетической энергии, входящие в уравнение (14.2):
Найдем обобщенную силу. Заметив, что связи, наложенные на систему, являются идеальными, вычислим сумму работ вращающего момента и сил тяжести на перемещении системы из положения, в котором обобщенная координата равна нулю, в произвольное положение с координатой s > 0: Поскольку откуда
Подставляя формулы (14.5), (14.7) и (14.8) в уравнение (14.2), получаем дифференциальное уравнение движения системы
из которого находим ускорение груза
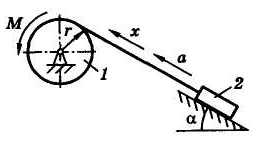
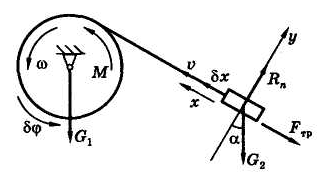
Задача 14.3.2. Грузоподъемная установка (рис. 14.3) состоит из барабана 1 массой m1= 200 кг и радиусом r= 0,2 м, невесомого нерастяжимого троса, который перемещает груз 2 по наклонной плоскости, составляющий угол α = 30° с горизонтом. Масса груза т2 = 1000 кг, коэффициент трения между грузом и наклонной плоскостью f = 0,2. К барабану приложен вращающий момент М = 1,6 кНм. Определить величину ускорения груза а. Барабан считать однородным цилиндром.
Рис. 14.3 Рис. 14.4
Решение. Рассматриваемая система имеет одну степень свободы (s = 1) и может быть описана одним уравнением Лагранжа второго рода
В качестве обобщенной координаты выберем координату х груза на наклонной плоскости q = x, тогда обобщенная скорость Кинетическая энергия системы имеет вид
где ω — угловая скорость барабана; J — его момент инерции относительно оси вращения. Для однородного цилиндра
и, следовательно, J = 4 кгм2. При учете кинематической связи v = ω r, т. е. кинетическая энергия запишется в виде
где приведенная (к грузу) масса системы равна
Вычислим производные, входящие в левую часть уравнения Лагранжа. Частная производная по обобщенной координате
так как кинетическая энергия явно от координаты х не зависит. Частная производная по обобщенной скорости
Полная производная по времени
дает левую часть уравнения Лагранжа. Входящую в правую часть уравнения обобщенную силу Q вычислим через возможную работу. Рассмотрим действующие в системе силы (рис. 14.4) и придадим телам системы возможное перемещение: бесконечно малое перемещение груза δх и поворот барабана на бесконечно малый угол δφ. Соотношение между этими величинами можно получить из уравнения кинематической связи v = ω r. Интегрируя обе части этого уравнения по времени, находим
или
гдеС — постоянная интегрирования. Варьируя последнее соотношение, получаем равенство
которое в данном случае имеет простой геометрический смысл — равенство длины дуги окружности произведению радиуса на величину угла в радианах. На возможном перемещении работу будут совершать сила трения
сила тяжести груза
и вращающий момент
Таким образом, возможная работа для механической системы будет равна
где Fnp — приведенная сила системы. Поскольку для системы с одной степенью свободы возможная работа записывается в видеδА = Qδq, и в нашей задаче δq = δx, сравнивая последние два соотношения, находим Q = Fnp, т. е. обобщенная сила является в данной постановке задачи приведенной силой
Вычислим ее, учитывая, что
Тогда
Составляем теперь уравнение Лагранжа, приравнивая правую и левую части: т np а = F np, откуда находим ускорение груза
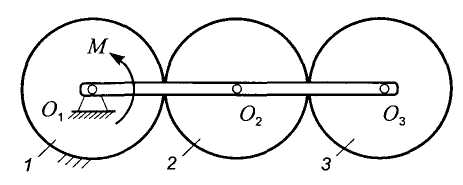
Задача 14.3.3. В планетарном механизме, расположенном в горизонтальной плоскости, колесо 1 неподвижно (рис. 14.5). К рукоятке О1О3 приложен постоянный вращающий момент М. Определить угловое ускорение рукоятки, считая колеса 2 и 3 однородными дисками с одинаковыми массами т и радиусами r. Массой рукоятки и сопротивлением пренебречь.
Рис. 14.5
Решение. Система имеет одну степень свободы. За обобщенную координату принимаем угол поворота рукоятки
Кинетическая энергия системы равна сумме кинетических энергий колес 2 и 3:
Предполагая, что колеса 2 и 3 совершают плоское движение, определяем их кинетические энергии по теореме Кёнига:
Рис. 14.6
Найдем скорости центров масс колес:
Угловую скорость колеса 2 определим с помощью мгновенного центра скоростей этого звена (точка
Колесо 3 движется поступательно, так как скорости его точекА и
Моменты инерции колес
Подставляя (14.12) в (14.11) с учетом (14.13)—(14.16), получаем кинетическую энергию системы как функцию обобщенной скорости
Вычислим производные от кинетической энергии системы, входящие в уравнение (14.10):
откуда
Подставив (14.18) и (14.19) в (14.10), получим дифференциальное уравнение движения механизма
из которого находим угловое ускорение рукоятки
Задания Д–6
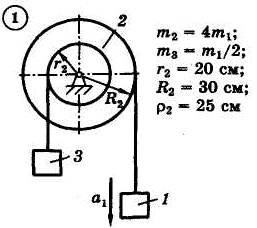
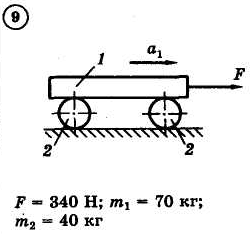
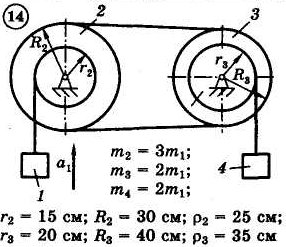
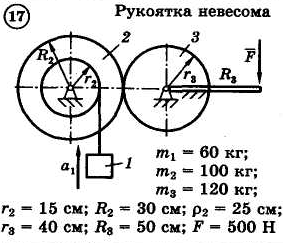
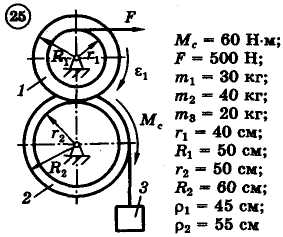
Для приведенных на схемах 1-30 механических систем, используя уравнения Лагранжа второго рода, определить указанное на схеме угловое ускорение или линейное ускорение. Нити невесомы и нерастяжимы. Принятые обозначения: т — массы тел, R и r — радиусы, ρ — радиус инерции (если он не указан, тело считать однородным цилиндром); при наличии трения указываются: f — коэффициент трения скольжения, fк — коэффициент трения качения.
Вопросы для самоконтроля (защиты контрольной работы)
1. Какой вид имеют уравнения Лагранжа второго рода? уравнений для данной механической системы? 2. Функцией каких переменных является кинетическая энергия механической системы в обобщенных координатах? 3. Что представляют собой уравнения Лагранжа второго рода: систему дифференциальных уравнений в обыкновенных или в частных производных? 4. Какой вид имеют уравнения Лагранжа второго рода для консервативной системы? 5. Как определяются обобщенные силы? Каково их число для данной механической системы? 6. Как формулируется вторая задача динамики в обобщенных координатах?
ЛИТЕРАТУРА
1.Тарг, С.М. Краткий курс теоретической механики: Учеб. Для втузов/ С.М. Тарг.-18-е изд., стер.- М.: Высш.шк.,2008. -416 с. 2. Яблонский А.А., Никифорова В.М. Курс теоретической механики: Учебник. 11-е изд.,стер.-СПб.: Издательство «Лань», 2004.-768 с. 3.Тарасов В.Н., Бояркина И.В., Коваленко М.В., Федорченко Н.П., Фисенко Н.И. Теоретическая механика: Учебное пособие. -М.: изд-во ТрансЛит, 2010.-560 с. 4. Доев В.С., Доронин Ф.А. Сборник заданий по теоретической механике на базе Mathcad:Учебное пособие.-СПб.: Издательство «Лань», 2010.-592 с..-(Учебники для вузов. Специальная литература). 5.Арсеньев О.Н., Степаненков О.С., Шаповалов А.В. и др.; под общ. ред. С.К. Слезкинского.-СПб.: Политехника, 2007.-487 с. 6.Диевский В.А., Малышева И.А. Теоретическая механика. Сборник заданий: Учебное пособие.-СПб.: Издательство «Лань», 2007.-192 с.-(Учебники для вузов. Специальная литература). 7. Стативка В.С., Хлюпин В.А., шабаев В.Н.Теоретическая механика. Руководство по решению задач. Статика: Учеб.пособие. – СПб: ВАТТ, 2010. – 285 с. 8.Стативка В.С., Хлюпин В.А., шабаев В.Н.Теоретическая механика. Руководство по решению задач. Кинематика: Учеб.пособие. – СПб: ВАТТ, 2011. – 170 с. 9. Стативка В.С., Хлюпин В.А., шабаев В.Н.Теоретическая механика. Руководство по решению задач. Динамика: Учеб.пособие. – СПб: ВАТТ, 2011. – 185 с.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 908; Нарушение авторского права страницы
 (14.1)
(14.1) - обобщенные координаты;
- обобщенные координаты;  - обобщенные скорости;
- обобщенные скорости;  - обобщенные силы; s - число степеней свободы системы.
- обобщенные силы; s - число степеней свободы системы. как коэффициента при вариации
как коэффициента при вариации  , соответствующей обобщенной координаты
, соответствующей обобщенной координаты  в выражении возможной работы активных сил системы:
в выражении возможной работы активных сил системы: .
. 
 ,...,
,...,  ,
,  ,…,
,…,  , ...,
, ...,  , на котором изменяется только обобщенная координата
, на котором изменяется только обобщенная координата  при неизменных других координатах и определяется возможная работа активных сил на этом перемещении:
при неизменных других координатах и определяется возможная работа активных сил на этом перемещении: ,
, .
. ,
, 

 ведущего шкива 3, который будем отсчитывать в направлении вращения шкива. Имея в виду цель задачи, примем за обобщенную координату перемещение s груза 1 (рис.14.2). Запишем уравнение Лагранжа
ведущего шкива 3, который будем отсчитывать в направлении вращения шкива. Имея в виду цель задачи, примем за обобщенную координату перемещение s груза 1 (рис.14.2). Запишем уравнение Лагранжа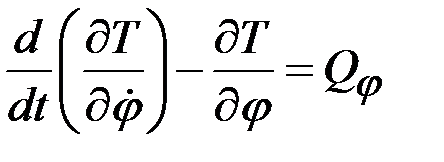 . (14.2)
. (14.2) .
. ,
, - скорости груза и противовеса,
- скорости груза и противовеса,  - угловые скорости шкивов,
- угловые скорости шкивов,  - моменты инерции шкивов относительно их осей вращения.
- моменты инерции шкивов относительно их осей вращения. . (14.3)
. (14.3) ,
, . (14.4)
. (14.4) (14.5)
(14.5) , (14.6)
, (14.6) . (14.7)
. (14.7) , то
, то . (14.8)
. (14.8) , (14.9)
, (14.9) .
.

 будет являться скоростью груза.
будет являться скоростью груза. ,
,
 .
. кг.
кг.
 .
.
 ,
, ,
, ,
, ,
,
 .
. ,
, .
. .
. .
. .
.
 (рис. 14.6), тогда обобщенная скорость будет
(рис. 14.6), тогда обобщенная скорость будет  . Уравнение Лагранжа второго рода запишется в виде
. Уравнение Лагранжа второго рода запишется в виде . (14.11)
. (14.11) . (14.12)
. (14.12)
 . (14.13)
. (14.13) , рис. 14.6):
, рис. 14.6): . (14.14)
. (14.14) равны, поэтому
равны, поэтому . (14.15)
. (14.15) . (14.16)
. (14.16) . (14.17)
. (14.17) . (14.18)
. (14.18) и вычисляем сумму элементарных работ активных сил на возможных перемещениях точек их приложения. Так как связи, наложенные на систему, являются идеальными, а механизм расположен в горизонтальной плоскости (поэтому работа сил тяжести колес равна нулю), то
и вычисляем сумму элементарных работ активных сил на возможных перемещениях точек их приложения. Так как связи, наложенные на систему, являются идеальными, а механизм расположен в горизонтальной плоскости (поэтому работа сил тяжести колес равна нулю), то ,
, . (14.19)
. (14.19) ,
, .
.