
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
И проидеmюr о судном расстоянияСтр 1 из 11Следующая ⇒
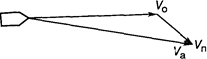
Относительные лаги по физическим принципам измер скоростей подразделяются на гидродинамические и индукц ные (электромагнитные) лаги. Для определения скорости и пройденного расстояния на судах устанавливают технические средства, которые получили на звание лагов. Лаги классифицируют по виду измеряемой скорости Принцип работы индукционного лага основан на явлении эл ромагнитной индукции. В таких лагах с помощью специаль устройства за бортом судна создается магнитное поле. При дв и по физическим принципам измерения скорости. нии судна в морской воде как в проводнике наводится электро Перемещающееся по водной поверхности Земли судно, в общем случае совершает движение и в водной и в воздушной средах. Вод ные и воздушные массы, кроме того, имеют самостоятельное дви жение относительно земной коры (дна морей и океанов). Таким об разом, движение судна - сложное движение. За абсолютную систе му отсчета в морской навигации принята система, неподвижная от жущая сила Е (ЭДС). Величина ЭДС зависит от скорости су Измеряя величину ЭДС, определяют относительную скорость на - скорость судна относительно воды V:
носительно поверхности Земли, и поэтому перемещение судна от Достоинством индукционных лагов является высокая точн носительно дна морей и океанов называют абсолютным. Движение судна относительно водной среды принято считать относительным движением, а перемещение судна за счет движения водных или воздушных масс называют переносным движением. работы на всем диапазоне скоростей судна, в том числе и на зад ходу. Некоторые их модели позволяют измерять скорость судн боковом направлении. К основным недостаткам такихлагов о сят иенадежиость работы в пресной воде, а также подверженн КаЖдый вид движения характеризуется соответствующим векто помехам при воздействии на измерительное устройство внеш
Vп. При этом =+ Vп (рис. 3.1). и переносной электромагнитных полей. Принцип работы гидродинамических лагов основан на изм Современные лаги подразделяются на абсолютные и относи нии динамического давления воды Рд, возникающего при дви
нии судна относительно массы воды. Величина этого давления Существует несколько физических принципов измерения абсо лютной скорости, из которых в настоящее время на практике реа лизованы два: измерение абсолютной скорости по доплеравекому сдвигу частот и определение абсолютной скорости по результатам висит от скорости судна V относительно воды:
темах (ИНС). Наибольшее распространение получили относительные лаги, Достоинством гидродинамических лагов является относит но низкая стоимость при достаточной для практики точности мерения скорости. К недостаткам этих лагов относят низкую дежность работы на скоростях до трех узлов. Во всех лагах устанавливается интегрирующее устройство, которые измеряют скорость корабля относительно воды, однако не торое по измеренной относительной скорости V и времени пла учитывают движения судна вместе с ее массами. Это переносное движение судна судоводителям приходится учитывать отдельно. ния t вырабатывает пройденное судном
0 расстояни е относител
сти судна Показания измеренной скорости и выработанного пройден го расстояния транслируются на репитеры лага - указатели ско с·I·и и счетчики пройденного расстояния (СПР), установленны различных частях судна.
В тех случаях, когда лаг по какой-либо причине не работает, а также для контроля за работой лага, скорость судна может быть оп ределена по таблице соответствия скорости судна оборотам его винтов, форма которой приведена ниже (форма 3.1). Форма 3.1
0 Глава 3. Определение пройденного судном расстояния
где а - аванс - расстояние, проходимое судном относительн ды за один оборот винта (движителя). Величина аванса рассчитывается на скоростных испыта
и соответст Такие таблицы составляют по результатам специальных испы таний, которые проводят на различных режимах движения судна. При этом скорость вращения винтов (число оборотов винтов за 1 минуту) измеряется с помощью тахометров. Сняв показания с тахометра и выбрав из таблицы соответствую щее значение скорости судна, можно рассчитать пройденное суд ном расстояние за определенный промежуток времени по формуле
щей ей скорости вращения (числу оборотов в минуту) движит судна N:

3.3 Определение пройдешюго судном расстоЯIВIЯ по относительному лагу
где S 0 - пройденное относительное расстояние, мили; V 0 - отно Лаг показывает пройденное расстояние нараста.ю сительная скорость, уз; t- время плавания, ч. В этом случае относительную скорость судна V 0 считают равной скорости, выбранной по оборотам винтов vоб• и рассчитанное рас
(3.5) итогом, поэтому для определения пройденного судном рассто необходимо заметить отсчеты лага в начале плавания ол 1 и при окончании ол 2 и рассчитать разность ол 2 - ол 1. Полученную ность отсчетов лага обозначают аббревиатурой рол. Как всякий прибор, лаг показывает пройденное расстоян некоторой погрешностью, поэтому рол* S. Для определения п денного судном расстояния необходимо определить погрешн Если время плавания судна выражается в минутах, то формула (3.5) примет вид: лага и учесть ее в виде поправки к рол. С этой целью на скорост испытаниях сравнивают относительное расстояние, пройде судном, S, с расстоянием, которое показал лаг (рол).
(3.6) Поправку лага рассчитывают как относительную его погр ность, взятую с обратным знаком: Для облегчения расчетов по формуле (3.6) в МТ-2000 помещена табл. 2.15. На судах кроме тахометров устанавливаются суммарные счет- чики числа оборотов движителей, которые производят подсчет ко личества оборотов нарастающим итогом. С помощью таких счет
М = V -V
100 _о л
v. v ' ( л
Поправка лага положительна, если S 0 > рол, т. е., если лаг пока зывает расстояние меньшее, чем в действительности прошло суд но. Поправка лага отрицательна, если S0 < рол.
поправок лага, которой и пользуются на практике (форма 3.2)
Раздел ---------------------------------------------
Решая выражение (3.9) относительно S0 , получим формулу для практических расчетов пройденного судном расстояния с исполь
So ==рол+ рол, S ==рол(1+ (3.11) 100 о 100 . 1 '' .'.!
|
Последнее изменение этой страницы: 2019-05-04; Просмотров: 326; Нарушение авторского права страницы
 Глава 3. Определение пройденного судном расстояния
Глава 3. Определение пройденного судном расстояния




 46 Раздел 1. Основные понятия навигации
46 Раздел 1. Основные понятия навигации N, об/мин
N, об/мин разность дN = N 2 - N 1. Пройденное расстояние определяется произведение:
разность дN = N 2 - N 1. Пройденное расстояние определяется произведение: 



 чиков пройденное относительно воды расстояние может быть рас считано с высокой точностью. Для этого за определенный проме жуток времени с суммарного счетчика необходимо снять последо вательно два показания числа оборотов N 1 и N 2 и рассчитать их
чиков пройденное относительно воды расстояние может быть рас считано с высокой точностью. Для этого за определенный проме жуток времени с суммарного счетчика необходимо снять последо вательно два показания числа оборотов N 1 и N 2 и рассчитать их 48 Раздел J. Основные понятия навигации
48 Раздел J. Основные понятия навигации Форма3.2
Форма3.2 КАРТОГРАФИЯ
КАРТОГРАФИЯ  Глава 4
Глава 4