
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Радиокурсово й угол. Истmmый радиопеленг
Радиомаяки крутоного излучения по дальности действия разделяются на радиомаяки дальнего действия (свыше 100 ми Gлижнего действия (до 100 миль). К последним также относятс юматические маломощные радиомаяки, называемые маркера В настоящее время азимутальные РНС реализованы в ви Судовыми радиопеленгаторами называются радиоприемные де радиомаячных систем, использующих в принципе своей работы направленный радиоприем. В составе системы имеется радиомаяк крутоного радиоизлучения, расположенный на берегу, и радиопе- ' ленгатор, фиксирующий направление приема радиоволн, распо ройства с антеннами направленного действия, позволяющие о ; (елять направления с судна на радиомаяки по излучаемым Jлектромагнитным колебаниям. На судах морского флота до недавнего времени применял ложенный на судне. Радиомаяки крутоного излучения, или как их сокращенно на ; (иопеленгаторы двух типов: со слуховым приемом (по миним IЮМУ уровню звукового сигнала используемого радиомаяка в зывают, круговые радиомаяки (РМк), представляют собой передаю щие радиостанции, работающие на объявленных радиочастотах и ltечном устройстве) и автоматические визуальные (со следя 11скательной катушкой гониометра или вращающейся рамо установленные в опорных радионавигационных точках. Они обла дают иенаправленной характеристикой излучения, а передавае мые ими сигналы включают в свой состав опознавательный сигнал и продолжительный сигнал для радиопеленгования. Для обеспече антенной). Оба типа радиопеленгаторов позволяют опреде угол между диаметральной плоскостью судна и направлением ltространения радиоволн от радиомаяка. Этот утол называетс ; (иокурсовым (РКУ) (рис. 22.1). Однако радиопеленгатор, к ния мореплавания радиомаяки объединены в группы, внутри ко магнитный компас, из-за влияния на него электромагнитных торых они работают поочередно на одной и той же частоте. Допус кается объединение в одну группу до шести радиомаяков. Время nей, индуцируемых токами высокой частоты в корпусе и др металлических конструкциях судна, подвержен девиации и
В руководстве " Радиотехнические средства навигационного' оборудования" (РТСНО) указываются координаты крутоных ра диомаяков, класс излучения, рабочая частота, частота модуляции: (если это предусмотрено классом излучения), опознавательный· сигнал, время работы, дальность действия либо мощность излуче- · ния сигнала. Для радиомаяков, работающих по запросу, указыва ется также порядок и адрес подачи запроса для включения. 11скаженное значение направления на радиомаяк. Поэтому от радиокурсового утла ( ОРКУ), полученный непосредственно с Gа радиопеленгатора, нужно исправить поправкой. Отклонение направления приходящей радиоволны под в lt ием судовых полей вторичного излучения называется радио ацией и измеряется утлом/
РКУ= OPKY+f 304 Раздел 6. Использование радиотехнических средств в навигации 1: шв а 22. Определение места судна с помощью круговых радиомаяков
Р КУ отсчитывается от носовой части диаметральной плоскости судна по часовой стрелке от О до 360°. Направление распространения радиоволн совпадает с дугой большого круга (ортодромией)- кратчайшим расстоянием между двумя точками на земном шаре. Ортодромия на меркаторской кар- ' те изображается кривой линией, обращенной выпуклостью к бли жайшему полюсу. Ортодромия служит навигационной изолинией обратного пе ленга - с радиомаяка на судно. Зная истинный курс судна в мо мент пеленгования, можно рассчитать пеленг на радиомаяк. Угол между нордовой частью истинного меридиана и направле нием распространения радиоволн называют истинным радиопе
Прокладка линии
ленгом (ИРП). Он отсчитывается от О до 360° по часовой стрелке. Из рис. 22.1 видно, что
ИРП=ИК+РКУ (22.1) или ИРП= КК+ Ь.ГК+ ОРКУ+ f. (22.2)
Найденный таким образом ИРЛбудет ортодромическим пелен гом (Орт Pll), так как он определяет направление дуги большого круга. Современные радиопеленгаторы имеют встроенный репитер гирокомпаса, позволяющий непосредственно определить отсчет радиопеленга ( OPil). В этом случае содромическоrо пеленга
По результатам измерений составляются таблица и график Jtиодевиации, аргументом для входа в которые служит отсчет лиокурсового угла. Навигационной изолинией при радиопеленговании с судна ляется изоазимута-геометрическое место вершин равных сфе •rеских углов между истинным меридианом и направлением ор лромии, проходящей через место радиомаяка Р. Изоазимута карте в меркаторской проекции изображаетсЯ сложной крив •по существенно затрудняет ее прокладку. Поэтому вместо нее карте прокладывается линия локсодромического пеленга, ко рый отличается от ортодромического пеленга на величину ор Jtромической поправки 'V (рис. 22.2) и представляет собой прям линию. ОртРП= ОРП+ь.ГК+f (22.3) Значение локсодромического пеленга рассчитьmают по форму
Радиодевиация переменна по величине и знаку; ее величина за висит от радиокурсового угла, под которым радиоволна приходит на судно, а также от длины радиоволны, излучаемой радиомаяком. Уменьшение (" уничтожение" ) радиодевиации производится с по мощью специального компенсационного устройства радиопелен Лок РП= Орт РП + 'V (22
Ортодромическая поправка может быть найдена по приб женной формуле: гатора. Однако полностью " уничтожить" радиодевиацию не пред ставляется возможным. Остаточная радиодевиация определяется на нескольких длинах радиоволн путем сравнения визуально измеренных курсовых углов на радиомаяк КУ со снятыми в то же время радиокурсовыми угла ми ОРКУ: \jl = 0, 5Ь.Лsinq> cp' (22
rде Ь.Л = (ЛР- Лс)- разность долгот между счислимым местом cy lla и радиомаяком;
fn = < рр + < f> c
j=KY- ОРКУ. (22.4) ' 'ер 2 - средняя широта между параллелями р ; tиомаяка и счислимого места судна. 306 Раздел 6. Использование радиотехнических средств в навигации .
Величину ортодромической поправки выбирают из табл. 2.12 МТ-2000.
22.3 Определение места судна по РИС " Лоран-С" и " Чайка"
Общие сведения. Система " Лоран-С" предназначена для. определения местоположения и скорости подвижных объектов. Дальность действия системы достигает 1700 км и 4000 км соответ ственно на поверхностных и пространствеиных сигналах. При этом заявленная точность определения места (Р= 0, 95) составляет 0, 46 км. Подобная система, использующая тот же частотный диа пазон, развернута в России и прилегающих странах и называется . " Чайка". В соответствии с Федеральным Радионавигационным Планом США (2001 г.) применение системы " Лоран-С" может
быть завершено после 2005 г. Принцип действия. Системы " Лоран-С" и " Чайка" являются им пульсно-фазовыми разностио-дальномерными РНС с синхрони зацией моментов излучения и фазы импульсных сигналов, излуча емых опорными станциями на средней частоте 100 кГц. Таким об от станции А - в фазе < рА' а от станции В - в фазе < J> в. Разность ·них сигналов
разом, в этих системах одновременно реализованы положитель ные свойства импульсных (отсутствие многозначности измере-. Фаза колебаний, выраженная в градусах или частях пери может быть представлена формулой ний) и фазовых (высокая точность) радионавигационных средств., Измерение навигационного параметра в РНС " Лоран-С" и. " Чайка" выполняется двумя методами: • импульсным (временным), путем измерения интервала D....,,.,, ... - ни между моментами прихода импульсов от двух станций (грубые измерения по огибаюшей импульсов); • фазовым, путем измерений разности фаз между вьrсс> к< > Ч< tс ными колебаниями (несущими частотами) указанных сов сигналов (точные измерения). < р = ffif. (2
Если выразить круговую частоту как
IЛе Т - период колебаний; Л - длина радиоволны; с - скор
Это является основной особенностью, отличающей " Лоран-С" и " Чайка" от РНС " Декка". Точность навигационных определений обусловливается вым методом измерений. Импульсный метод служит, по лишь для разрешения многозначности фазовых измерений. Принцип фазового метода измерения навигационного" " " " '..,. тра заключается в следующем. Пусть береговые станции А и В (рис. 22.3) излучают на частоте незатухающие колебания, согласованные по фазе в юv'" " " ' излучения. Судно, находящееся в точке К, принимает эти распространения радиоволны; D- расстояние от судна до наз IIОЙ станции, то на основании формул (22.7) и (22.8) полу < Jкончательное выражение величины разности фаз:
(2
308 Раздел 6. Использование радиотехнических средств в навигации
Как видно из формулы, разность фаз пропорциональна разно сти расстояний до наземных станций (величина 7t постоянна).
Навигационный параметр - разность расстояний !! D - измеря 1 izaвa 22. Определение места судна с помощью круговых радиомаяков
1де Ь - база станций - расстояние между станциями А и В· t 1\Овая задержка. ' к При необходимости кодовая задержка может быть исполь на для создания закрытого режима работы с целью предотвр ется на судне с помощью фазометра косвенно, через радионавига IШЯ несанкционированного использования РНС. Величины к ционный параметр - разность фаз д<: р. Известно, что постоянной величине разности расстояний (раз вых задержек выбираются такими, чтобы в рабочей зоне дейс РНС импульсы ведущей и ведомой станций не перекрывались ности фаз) соответствует навигационная изолиния- гипербола. Разность фаз колебаний, как и сама фаза, изменяется в преде лах от О до 27t, от О до 360°. Изменение разности фаз на величину 27t называется фазовым циклом. Полоса на местности, ограниченная двумя гиперболами, в пре делах которой разность фаз меняется на один фазовый цикл, назы вается фазовой дорожкой. с другом и приходили на судовой приемаиндикатор раздельно В этом случае разность времен прихода сигналов
!! t=-+-+! к. с с Фазометры судового приемаиндикатора измеряют только дроб На продолжении базовой линии со стороны ведомой стан ную часть фазового цикла. Поэтому каждому отсчету д<: р будет соот ветствовать несколько гипербол, отличающихся друг от друга на фазовый цикл 27t. Таким образом, в каждой дорожке найдется по одной гиперболе, соответствующей измеренному отсчету д<: р. Мно гозначность измерений может быть разрешена с помощью им пульсного метода. Суть импульсного метода заключается в следующем. В точке К находится судно, на котором измеряют интервал времени Ы = t А - t в между моментами прихода двух импульсов от ведущей А ( BПJj и ве домой В(ВМ) станций (см. рис. 22.3). Разность расстояний !! D от места судна К до береговых станций находится по формуле в произвольной точке К1 отсчет радионавигационного парам М=tк. На нормали к середине базы в точке К 2
= tDв+ tь + tк- tDA.
Так как tDв = tDA' то
где с - скорость распространения радиоволн. Величина Ы определяется с помощью судового приемоиндика- · тора. Одной и той же разности расстояний !! D соответствуют две' Таким образом, оцифровка семейства гипербол пары стан изменяется от ведомой станции к ведущей от величины t до 2t •по обеспечивает: к ь изолинии, так как гипербола является кривой, симметричной от носительно мнимой оси. Для исключения этой неопределенности в импульсно-фазовых· • однозначность отсчета радионавигационного параметра (к дому значению Ы соответствует одна конкретная ветвь ги болы); системах ведомая станция излучает сигнал после приема сигнала от ведущей станции, т. е. работает с постоянным запаздыванием, · • положительное значение радионавигационного параметра всей рабочей зоне действия пары станций (Ы > О);
(22.11. • уверенное опознание сигналов, так как в любой точке дейст пары станций сигнал ведомой станции приходит на судно п нее сигнала ведущей. 310 Раздел 6. Использование радиотехнических средств в навигации
Таким образом, целое число периодов в принятом сигнале оп ределяется импульсным методом, а дробная часть периода колеба ния- фазовым, т. е. путем измерения разности фаз между высоко частотными колебаниями, заполняющими импульсы. Здесь раз ность фаз приходящих сигналов трансформируется во временную
! шва 23. Использование судовых радиолокационных станций
дt дtи +дtФ NT+-- 2n
Для безошибочного определения целого числа периодов н меру, соответствующую измеренной части периода колебаний. Полный отсчет радионавигационного параметра формируется следующим образом. ходимо, чтобы погрешность импульсных измерений бьша мен 11ериода несущих колебаний, т. е. По результатам измерений импульсным методом получаем це
8tи т < -. (2 2
(22.13) Для РИС " Лоран-С" 8tи < 5 мкс. В приемаиндикаторах с помощью раздельных систем слеж
где Л и Т- длина волны и период несущих колебаний соответст 1а особой точкой огибающих и периодом несущих колебаний ответствующих этой особой точке, а также автоматического и рения разности фаз несущих колебаний достигается высокая венно.
Д]) tюсть измерения радионавигационного параметра. При этом ttульсный счетчик дает грубые отсчеты параметра д tи (число
(22.14) ных периодов Тколебаний), а фазовый счетчик- д tФ- точны счеты до сотой доли периода Т. На радионавигационных картах и в специальных таблица расчеты выполнены для случая приема поверхностных сигнал случае приема пространствеиных сигналов необходимо учиты т. е. импульсным методом измеряется целое число - количест tюправку за распространение радиоволн пространствеиным во периодов колебаний, заключенных в принятом радиосигнале. ' ем. Величина и знак поправок для различных сочетаний прих Определив величину N, тем самым представляется возможным ус транить многозначность фазовых измерений, т. е. найти целое tних сигналов дается на радионавигационных картах или в сп ; tльных таблицах. число отсчета радионавигационного параметра. Результат измерения фазовым методом выразим в микросекун дах, для чего разность прихода импульсов между двумя береговы ми станциями определим через разность фаз дФ : Точность определения места. При определении места судна с мощью РИС " Лоран-С" обычно используют две гиперболы. tюсть определения места судна зависит от погрешностей опре ttия навигационного параметра и геометрического фактора дФ.Т дt =--
(22.15) 11ересечения линий положения и базовых углов). При пользов радионавигационными картами на точность также влияет пог ф 21t
Дф Здесь - - разность фаз в фазовых циклах. 21t Так как дФ < 2n, то формула (22.15) выражает дробную часть пе риода Т, мкс. Сложив целую часть отсчета (22.14) с дробной частью (22.15), получим полный отсчет радионавигационного параметра tюсть нанесения гипербол на карту. Применительно к РИС " Лоран-С" формула для расчета Р
(2
312 Раздел 6. Использование радиотехнических средств в навигации Глава 23. Использование судовых радиолокационных станций
ние между оцифрованными гиперболами d 1 = d 2 = 5 милям; раз ность оцифровки дТ 1 = дТ 2 = 10 мкс; G = зо·. Найти М 0.
лах ее диаграммы направленности, на вход приемникаРЛС п пают отраженные сигналы. При совпадении оси диаграммы на ленности антенны с целью напряжение на входе приемника максимальным, и указатель поворота антенны покажет напр ние на объект. При нахождении в радиусе действия РЛС нескол
ГЛАВА23 целей отраженные сигналы от них будут смещены по времени и муту. Отраженные сигналы от объекта отображаются на эк РЛС, что дает возможность определять его координаты. Основной недостаток радиолокационного метода пелен IIИЯ - относительно невысокая точность определения напр IIИЯ на объект. ИСПОЛЬЗОВАНИЕ СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ РЛС применяются автономно или совместно с береговыми
23.1 Назначение и прИIЩИП действия судовых навигациошiых РЛС ройствами- радиолокационными отражателями и радиолок онными маяками-ответчиками, находящимися в радионавиг онных точках. Определение места судна относительно отражающих объе Радиолокация - метод обнаружения в пространстве раз 11роизводится по пеленгу и расстоянию до них. Поэтому навиг личных объектов посредством радиоволн. Этот метод реализуется в радиолокационных станциях (РЛС), действие которых основано на использовании явления отражения радиоволн от различнь онные РЛС являются дальномерно-азимутальными радиотехн скими средствами. Возможность определения местоположения судна при п объектов, расположенных на пути их распространения. Судовая РЛС- это установленная на судне РЛС, предназначен ная для обнаружения и последующего наблюдения за берегом, су дами, льдами и другими объектами, представляющими интерес для судоводителя. нии в сложных условиях (малая видимость, наличие навигац ных опасностей, узкостей и др.), наглядность отображения в Jiей обстановки в районе плавания делают РЛС одним из осно 1·ехнических средств судовождения. РЛС позволяет решать следующие задачи: Судовая навигационная РЛС (НРЛС) обеспечивает возмож • определение координат места судна по точечным и простра ность измерять расстояния, пеленги и курсовые углы на объекты и применяется для определения места судна в географической и от носительной системах координат при самых разнообразных усло виях плавания. венным ориентирам путем измерения радиолокационных ленгов и дистанций; • определение места судна по пространствеиным ориентира тем совмещения равномасштабных изображений берегово Навигационные радиолокационные станции представляют со бой импульсные радиотехнические средства, работа которых осно нии или отражающих горизонталей, наблюдаемых на инд торе кругового обзора РЛС и на карте; вана на использовании зависимости между временем распростране ния радиосигнала и навигационным параметром. Такая РЛС пери • опознание побережья и глазомерная ориентировка при пл нии в стесненных условиях; одически излучает кратковременные импульсы колебаний СВЧ, а в ' промежутке между излучениями принимает отраженные от объек • обнаружение надводных навигационных опасностей, плаву льда, ливневьоблаков и снежных зарядов;
= 2Djc. Здесь • обнаружение и наблюдение встречных судов, определение D - расстояние до объекта, а с - скорость распространения радио волн. По измеренному интервалу времени рассчитывается даль ментов их движения для оценки ситуации недопустимого с жения и решения задачи безопасного расхождения с ними;
• определение относительного места судна при плавании в к ванах; • определение маневренных элементов судна. 314 Раздел 6. Использование радиотехнических средств в навигации
1 юва 23. Использование судовых радиолокационных станций
Навигационные РЛС, входящие в состав автоматизированных навигационных комплексов или в интегрированное оборудование ходового мостика, или сопрягаемые с системами автоматической радиолокационной прокладки, позволяют, кроме того: • автоматизировать процесс прокладки линий относительного движения встречных судов, выполнять расчеты элементов их На точность определения места судна с помощью РЛС не l редственно влияют искажения за счет размеров ориентиров и , юв их облучения РЛС. При определении места по радиолокаци 1 щм пеленгам и дистанциям необходимо использовать точечн ориентиры, соизмеримые с разрешающей площадью РЛС (п 11щдь, ограниченная разрешающей способностью РЛС по угл движения и маневра расхождения с ними; • осуществлять обсервационную прокладку пути судна при пла 1111станции). Пространствеиные ориентиры, размеры котор t юльше разрешающей площади, целесообразно использовать то вании в стесненных условиях и в прибрежной зоне; • непосредственно измерять элементы суммарного сноса судна. .. о для обсерваций по измеренным радиолокационным дистанц 11М до участков, облучаемых РЛС под прямым углом. При облу 1111И таких ориентиров (объектов) под острым углом их изобра К недостаткам навигационных РЛС, влияющим на безопас ность судовождения, относятся: • наличие теневых секторов и минимальной дистанции, в преде ltие на экране РЛС смазывается, что вызывает появление труд \''tитываемых систематических погрешностей как по направ 1111Ю, так и по дистанции. лах которых объекты не обнаруживаются; При определении места судна по естественным радиолокац • специфическое искажение объектов на экране РЛС относи тельно их изображения на морской навигационной карте и за о1tным ориентирам необходимо учитывать, что их отражающ 1юверхности (скалы, обрывистый берег, сопки и т. п.) не совпа труднение их опознавания; • ограниченность дистанций обнаружения объектов географиче н )т на местности с береговой линией, а лежат на уровнях (горизо 1 ; шях), обычно превышающих уровень моря, а на больших даль ским фактором радиолокационной видимости, зависимость от отражающих способностей и размеров объектов, а также зави симость возможности обнаружения от маскирующего влияния осадков ливневого характера; • относительно низкая точность радиолокационного пеленгования. с tнх- и высоту антенны РЛС. Отражающие горизонтали, опред 'IL'Нные опытным путем, наносятся на карту.
Способы определения места судна с помощью РЛС
Ориентировочное значение радиолокационной дальности об наружения объектов (в милях) при нормальном (атмосферное дав ление 760 мм, температура воздуха 15 ос, температурный градиент 0, 0065 с/м, относительная влажность 60%) состоянии атмосферы
Общие сведения. Существует две группы способов испол IОВания судовой РЛС для определения места судна: • по точечным ориентирам; • по пространствеиным ориентирам.
Точечные ориентиры- это такие, размерами которых при пр 1.. rt; щке линий положения можно пренебречь. Точечные ориент 1 11.1 делятся на:
ражающей части объекта над уровнем моря, м. - высота от • активные отражатели, которые изображаются на экране в ви ответной точки;
• 11ассивные отражатели, представляющие собой многогранн фигуры из металла, обладающие способностью отражать ради волны без рассеивания. Наилучшей формой пассивных отраж телей являются уголкавые отражатели; • сетественные или искусственные ориентиры, которыми мог быть маяки, навигационные знаки, заводские трубы и т. п. 316 Раздел б. Использование радиотехнических средств в навигации,
l taвa 23. Использование судовых радиолокационных станций
Рис. 23.2. Определение места судна по радиолокационному 11еленгу и расстоянию до одно т ориентира s
Рис. 23.1. Определение места судна по радиолокационным расстояниям
середина треугольника погрешностей. Если треугольник велик
В практике судовождения точечные ориентиры встречаются ''собходимо проверить правильиость опознавания ориентиров, мерений и прокладки. редко. Поэтому для определения места судна используются прост ранствеиные ориентиры. К ним относятся объекты, изображенщ которых на экране РЛС и карте имеют размеры и их нельзя при· нять за точку (береговая черта, холмы, мысы, не имеющие резких очертаний, бухты, острова и т. п.). Определение места судна по расстояниям, измеренным до не, ск< mь, к: и! f;, ориентиров (рис. 23.1). Намечают перед определением места ориен Радиальная средняя квадратическая погрешность определе места судна по расстояниям, кбт: а) при двух ориентирах
sше 2 тиры на карте и быстро последовательно измеряют расстояния те е - разность пеленгов на ориентиры, град; т 2, т 2 - СКП D D них. При необходимости измеренные расстояния приводятся к ному моменту времени. В момент последнего измерения замечается время и отсчет га. На карте находится обсервованное место, которое является кой пересечения дуг окружностей, проведеиных из ориентиров учетом приведения их к одному моменту времени), как из с радиусами, равными измеренным расстояниям. При выборе ориентиров необходимо следить за тем, чтобы нии положения пересекались под углом в пределах от 30 до 1 причем сначала измеряется расстояние до ориентира, мерения расстоянии, кбт. 1 2
(2
'JLe е - углы пересечения между линиями положения. В об ·лучае третье расстояние повышает точность определения м судна на 10-20%. близок к курсовому углу, равному 90°, а затем на ориентиры, совые углы которых близки к О или 180°. На карте находится счислимая точка, указывается невязка, Определение места судна по радиолокационному пеленгу и расс •шю до одного ориентира (рис. 23.2). Способ применяется, ес 11ределахдействия РЛС находится один ориентир. Для этого н кладывается линия пути, оформляются надписи. ходимо одновременно взять пеленг на ориентир и измерить до
рееекаютел в одной точке, то за обсервованное место m расстояние, заметить время и отсчет лага. Затем проложять ратный пеленг (ИП±180°) от ориентира на карте. Из ориент
318 Раздел 6. Использование радиотехнических средств в навигации
как из центра окружности с радиусом, равным измеренному рас стоянию, провести дугу окружности. Место судна находится в пе ресечении пеленга с дугой окружности. Рассчитывается счислимая точка на момент измерения и показывается невязка. При измерении пеленга его необходимо исправить поправкой, гирокомпаса. Если же измерялся радиолокационный курсовой угол (РЛКУ) на ориентир, то истинный пеленг
ИЛ= ККrк + РЛКУ+! '!.ГК.
! iюва 23. Использование судовых радиолокационных станций
п]2 +m2 О 57, 30 D '
где трлп- СКП радиолокационного пеленга; mD- СКП радиоло кационного расстояния; D- радиолокационное расстояние. Определение места судна по радиолокационным пеленrам. Способ
Рис. 23.3. Опознание расчлененного берега по вееру радиолокационных пел и расстояний
Опознание расчлененного берега по вееру пеленгов и расстояний ( 23.3). Измерив пеленги и дистанции до видимых на экране применяется при нескольких опознанных точечных ориентирах и порЯдок его выполнения практически не отличается от определения места судна по визуальным пеленгам. ориентиров, на кальке из произвольной точки К надо провести ридиан и параллель, проложить истинные пеленги, а по ним о жить в масштабе карты измеренные расстояния. Затем кальку н
жить на карту таким образом, чтобы точка находилась в рай счислимого места судна на момент измерений. Сохраняя орие ровку кальки относительно меридиана и параллели на карте, н ходимо найти такое положение кальки, при котором наиболь 'Iисло отложенных расстояний " упрется" в контуры объектов б где трлп - СКП измерения радиолокационного пеленга; D1, D 2 расстояния от обсервованного места до ориентиров, мили. ' овой черты. Уколом циркуля место К следует перенести на кар 11ринять за ориентировочное. Для большей уверенности необх При определении места судна по пространствеиным nnнa• ·· J мо повторить опознавание несколько раз, связывая полученные рам необходимо учитывать особенности изображения берега на ране РЛС. Горы, холмы, возвышенности экранируют расположен ные за ними местность, изображения от которой на экране не чается. Поэтому полуостров или мыс может быть принят за" '" " " ".... ссрвованные точки счислением. Отсутствие значительных расх Jtсний укажет на то, что участок побережья опознан правильно. Полученное место суднаненадежно и при удобном случае н \Одимо его определить другим способом. что влечет за собой опасную ошибку в опознании ориентиров. Определение места судна по расстояниям, измеренным на постоян Изображения ориентиров, расстояния между которыми меныше разрешающей способности станции, на экране сливаются: их или невозможно различить. Объекты, облучаемые лучом курсовом угле (рис. 23.4). Этот способ применяется, когда су 1щет вдоль крутого, обрывистого и изрезанного берега. На постоянном курсовом угле измеряются расстояния до б " вскользь", почти касательно к их поверхности, наблюдаются ' а через равные промежутки времени и замечаются соответстве
< нечеты лага. На кальку наносится путь судна и пеленги с отлож IIыми на них расстояниями.
/'лава 23. Использование судовых радиолокационных станций
ОЛ;
Рис. 23.4. Определение места судна по радиолокационным рас стояниям, измеренным на посто янном курсовом угле Быстро и последовательно измеряются расстояния до неск ких ориентиров. При этом подвижный импульс дальности нео ; щмо совмещать с той частью радиолокационного изображе которая больше всего выступает в сторону судна. Замечаются мя и отсчет лага в момент измерения расстояния до послед ориентира. На кальке наносится линия пути судна и из произвольной ки О как из центра проводятся дуги окружностей радиусами, ными в масштабе карты измеренным расстояниям, и линии ленгов. Калька накладывается на карту около счислимого места суд 11еремещается таким образом, чтобы проведеиные на ней дуги
Кальку передвигают около счислимого места так, чтобы путь судна на карте бьш параллелен пути на кальке. Это делается с та ким расчетом, чтобы наибольшее число точек, отмечающих изме ренное расстояние, совпадало с береговой чертой. Рассмотренный способ определения места не дает высокой точносrn. Определение места судна до ближайших к нему участков берега (рис. ружностей касались береговой черты. В точке О делается накал трием циркуля и отмечается обсервованное место судна.
Определение места судна с использованием u радиолокациоm1ых маяков-отве'IЧИКов и отражателеи 23.5). Способ применяется при наличии в районе плавания кру
Определение места судна по радиолокационным маякам Jiетчикам (РЛМк). Радиолокационные маяки-ответчики предс
На карте ляют собой устройства, излучающие электромагнитные импул в диапазоне судовых РЛС в ответ на ее запросный сигнал. 11редназначены для создания активных радиолокационных ор , ·иров, обеспечивающих уверенное радиолокационное опозн 11Ие и определение места судна по пеленгу и расстоянию до ни Радиолокационными маяками-ответчиками оборудуются: кк 89, 5" (+0, 5" ) )r .", -----------
• районы интенсивного плавания, сложные в навигационном ношении, где маяки, береговые и плавучие знаки не дают .." ·. ;:;; ]; \ ; ·.'.:: ··:.. : .:.: ; -::.- - -
кого изображения на экране судовой РЛС или не опознаю среди других объектов; • районы побережья, расположенные вблизи рекомендован
На кальке путей, трудно опознаваемые на экранах судовых РЛС (низм ные берега с прямолинейной или плавно изгибающейся бер вой линией, низкие песчаные косы, осушные или низмен острова и мысы, подвижные береговые линии в районах с п ливными колебаниями); • районы с частыми продолжительными туманами, осадками • кромки льда, ледовых обрывов, пакового льда.
Рис. 23.5. Определение места судна до ближайших к нему участков берега С учетом атмосферной рефракции радиоволн наибольшая д lюсть действия РЛМк в милях рассчитывается по формуле 322 Раздел 6. Использование радиотехнических средств в навигации
D= 2, 2(Ш+ П), (23.7) Глава 23. Использование судовых радиолокационных станций
гдеН-высота РЛМк от уровня моря, м; h- высота антенны судо чечным ориентирам. Причиной этого является погрешность в вой РЛС, м. лержке ответного сигнала, достигающая величины 0, 5-1 кбт. В настоящее время наибольшее распространение получили РЛМк с синхронизированным ответом, работающие на частотах Определение места судна по пассивным отражателям. Радиоло ционные пассивные отражатели применяются для повыше судовых РЛС, что позволяет видеть отметки маяков на экране од новременно с радиолокационным изображением. Принцип их отражательной способности навигационных знаков, плаву предостерегательных знаков, а также обозначения отдель действия заключается в следующем. Зондирующий импульс от су довой РЛС (запрос) принимается антенной маяка, детектируется, усиливается и подается на схему выработки кодовых сигналов иге нератор самозапуска. Импульсы кодовой комбинации поступают на передатчик, обеспечивающий модуляцию частоты, проходят в антенну и излучаются в пространство. На экране РЛС по направ точек, расположенных на водной поверхности или на низм IЮМ побережье, не имеющем характерных радиолокацион ориентиров. По конструктивному исполнению различаются следующие ды отражателей: а) плоская металлическая пластина отражает максимум элек лению излучения появляется несколько отметок (кодовая комби нация), из которых ближайшая к ответчику находится в удалении от маяка, равном истинному расстоянию, плюс задержка импуль са запроса в цепях ответчика. магнитной энергии в обратном направлении лишь в том слу сели радиоволны падают перпендикулярно к ее поверхности. фективная площадь отражения плоской пластины При отсутствии запрашивающих импульсов передатчик отклю чается и маяк находится в режиме ожидания. РЛМк включается в работу после поступления двух последовательных запрашивающих импульсов, при условии, что второй прошел в приемник не позже определенного интервала времени после первого. Этим обеспечи SэФ = ФлР;; л2 , (2
ще Рг - геометрическая площадь пластины, м2; Л - длина ра волны, м. б) двугранный уголкавый отражатель состоит из двух пло вается предупреждение срабатываний, вызванных случайными сигналами. Для обеспечения возможности использования РЛМк всеми судами на них применяется метод изменения (" качания" ) часто ты. Маяки-ответчики передают импульсы на частоте, плавно из меняющейся в пределах определенного диапазона. Ответный сигнал на экране РЛС появляется в тот момент, когда частота ма пластин, расположенных под углом 90° и имеющих общее ре Диаграмма отраженного сигнала двугранного отражателя и максимальное значение в биссекторной плоскости. Эффективная площадь отражения в биссекторной плоскос
Сигнал РЛМк имеет на экране РЛС вид прерывистой линии, соответствующей опознавательному сигналу маяка, или сплош ной непрерывной линии, расположенной радиально за эхо-сиг налом маяка-ответчика на расстоянии нескольких сотен метров. С помощью РЛМк можно определить пеленг и расстояние до не го. Следовательно, для оценки точности определения места по. в) трехгранный уголкавый отражатель. Применяются отраж ли с треугольными и квадратными гранями. Эффективная площадь отражения рассчитывается по форму • для отражателя с треугольными гранями
S = 4/3па4/Л2 (2 эф '
! Ле а -длина ребра, м;
(2 324 Раздел 6. Использование радиотехнических средств в навигации
жатель
Глава 23. Использование судовых радиолокационных станций
1
1
Радиолокационная дальность обнаружения отдельных уголко вых отражателей D в километрах рассчитывается по формуле
D=14.
Отдельные уголковые отражатели применяются редко, так как они не обеспечивают отражения со всех сторон. Для получения от
Основные типы пассивных уголковьiХ отражателей, применяе в практике навигационного оборудования, приведены в табл. 23. Радиолокационные отражатели также применяются для огр нения фарватеров. Для этого пассивные отражатели устанавл ражения при облучении с любых направлений уголковые отража тели монтируются в группы. Для этих целей применяются: ются парами, по одному с каждой стороны фарватера, на рав расстоянии от его оси и на перпендикулярной линии к ней. а) на береговых СНО - спиральные пассивные отражатели (рис. 23.6). Этот способ использования пассивных отражателей полу 11азвание радиолокационных дистанционных створов. Если б) на буях и вехах - шестиуголковые и восьмиуголковые отра жатели (рис. 23.7). сигналы обоих отражателей будут находиться на одном и том 11одвижном круге дальности (ПКД), то это означает, что расс
Таким образом, при проводке судна по радиолокацион llистанционным створам должно вьщерживаться равенство рас
сивный отражатель НIIИЙ до радиолокационных отражателей. Точность плавания 1 аким створам определяется в основном погрешностью набл
! Jюва 23. Использование судовых радиолокационных станций
Повернуrь
Суднона
Повернуrь н Правилах по оборудованию морских судов Российского мор го регистра судоходства.
• захват целей может быть ручным или автоматическим при о сительной скорости до 100 узлов; при автоматическом зах должен быть предусмотрен запрет захвата в определенных зо обзора; • должно обеспечиваться автоматическое сопровождение, о ботка, одновременное отображение и непрерывное обновле данных не менее чем по 20 целям; сопровождаемые цели до ны быть четко обозначены на экране соответствующими с волами; информация на индикаторе не должна затенять дан от РЛС; • на экране по требованию должно отображаться по крайней ре четыре равноразнесенных цели за период, соответствую вправо линии створа влево используемой шкале дальности при одновременном указа временной шкалы прокладки предьщущих положений; Рис. 23.8. Дистанционные радиолокационные створы
теля в оценке положения эхо-сигналов отражателей относительно ПКД. Боковое смещение судна с оси створа • должны быть предусмотрены, по крайней мере, шкалы дал сти 3, 6 и 12 миль, при этом дополнительно могут быть исп зованы и другие шкалы дальности, соответствующие треб ниям резолюции A.477(XII); • САРП должно допускать работу в режиме относительного дви ния при ориентации изображения " Север" и " Курс" со стаб L= е' 2sin- 2
где mt:.D- погрешность наблюдателя в оценке разности расстояний· до знаков; е - угол между направлениями на знаки. Опыт применеимя радиолокационных дистанционных створов зацией от гирокомпаса, а также в режиме истинного движени • информация о курсе и скорости по захваченным целям дол вьщаваться в векторной или графической форме; • должна быть предусмотрена возможность быстрого опред ния пеленга и расстояния до любого объекта, появляюще на экране; показал, что плавание по фарватерам с их помощью производится • при автоматическом захвате цели на экране через одну ми с высокой точностью. ту должна отображаться тенденция ее движения, и в тече 3 мин - предвычисленный вектор перемещения; • наблюдатель должен иметь возможность выбрать любую со 23.4 Средств о автоматическо й радиолокациоmю й прокладки вождаемую цель для получения информации; при этом по просу должны немедленно выдаваться следующие данные: Средство автоматической радиолокационной прокладкц кущие дистанция D и пеленг П, курс К и скорость V, дистан
в сложной навигационной обстановке путем непрерывной, и быстрой оценки ситуации. Эксплуатационные требования к САРП определены в t'е: ЮЛ[Ю! " ции Ассамблеи ИМО А.823(19), принятой в ноябре 1995 г., а кратчайшего сближения Dкр и время Ткр следования до то кратчайшего сближения; • должна быть предусмотрена возможность имитации ман своего судна на расхождение со всеми сопровождаемыми ц ми с упреждением по времени или без него относительно мента имитации. 328 Раздел 6. Использование радиотехнических средств в навигации Глава 23. Использование судовых радиолокационных станций
Кроме того, САРП должно обеспечивать визуальную и звуко вую сигнализацию при сближении с целью на заданное расстояние Первый способ используется при раздельном отображении формации в ходе решения частных задач предупреждения сто или пересечение ею зоны, выбранной оператором, а также имею щей расстояние и время кратчайшего сближения меньше, установ новения судов и включает три режима отображения: истинног относительного движений, а также проигрывания маневра. ленных оператором. В целях повышения эффективности использования САРП в про Первый режим используется для оценки действительной сит ции движения целей в зоне обзора РЛС. цессе обеспечения безопасности плавания в районе с интенсивным судоходством и сложном в навигационном отношении для судоводи Второй режим служит для оценки степени опасности сбли ния со встречными судами. теля важны не только радиолокационное отображение внешней об становки и элементы движения целей, но и информация о навигаци Третий режим применяется для обеспечения безопасного ма вра на расхождение судов с учетом правил МППСС-72. онных опасностях: (береговая черта, кромки фарватеров, изобаты опасных глубин, банки, мели, запретные районы, СНО и т. п.). В этой связи в современных САРП применяется наложение радиоло При этом курсы и скорости целей представляютел на экр жстраполированными на заданный момент времени вектор Jtвижения целей. Начало вектора совпадает с отметкой сопров кационного изображения на электронную карту. Комплексное изоб ражение навигационной обстановки, маневрирующих целей и соб лаемого судна, а его длина соответствует пути цели за время э траполяции. Такой способ отображения позволяет оценить: ственного судна относительно подвижных объектов и навигацион ных опасностей позволяет оперативно принять оптимальное реше • при относительном движении - степень опасности целей, DKP' ткр; ние на маневр расхождения и оценить связанный с ним риск. • при истинном движении - пройдет ли цель по носу или по к Современные САРП, являясь обязательным (конвенционным) оборудованием для судов валовой вместимостью более 10000, удовлетворяют всем вышеперечисленным требованиям. Поэтому остановимся только на рассмотрении вопроса, связанного с отоб ражением информации в САРП. ме и на каком расстоянии собственное судно пересечет к встречного. Режим проигрывания маневра может осуществляться как в носительной, так и в истинной системе координат. Второй способ отображения радиолокационной информа Основную роль при отображении информации играют средства в виде зон опасностей в истинной системе координат реализу индикации, которые служат для оперативного отображения внеш ся только в САРП фирмы " Сперри" (США). На рис. 23.9 при ней обстановки: движения целей в районе плавания и представления цифровых данных о траектории их движения относительно персме щения собственного судна. При этом, основное значение для судо лен пример отображения радиолокационной информации в д IЮМ ВИДе. У цели отображается линия экстраполированного персме водителя имеет графическая информация, которая должна быть: ния и на ней зона опасности, указывающая опасные курсы сво • оперативной и характеризовать текущую ситуацию без сущест-: венного запаздывания; • наглядной и четкой, без второстепенных деталей; важная ин формация должна вьщеляться цветом, яркостью, условными t.: удна, при которых произойдет сближение с целью на дистанц меньше заданной Dкр· В первых образцах САРП фирмы " Спер юны опасности отображались в виде эллипсов, в последую моделях- в виде шестиугольников. знаками и т. д.; Достоинство рассматриваемого метода состоит в том, что пр • адекватной, т. е. отражать существенные для решаемой задачи павляется возможным одновременно оценивать реальную сит аспекты ситуации с требуемой точностью; • полной, т. е. давать все необходимые данные для решения по·· 1 tию движения судов, вероятность опасного сближения с целям 1·акже производить выбор курса для маневра расхождения. ставленной задачи. К недостаткам данного способа можно отнести: трудность г юмерной оценки Dкр и Ткр целей; малую наглядность изображе
oннoй информации о движении судов: векторный опасностей. 11ри большом числе целей из-за затенения экрана зонами опасн lсй; невозможность изменения времени экстраполяции векто 11 неприспособленность к выбору маневра скоростью.
Глава 23. Использование судовых радиолокационных станций
Неподвижная цель Таблица 23.2. Эксплуатационные характеристики НРЛС
Антенна
НАЯДА-SМЕ (10 см)
Предсказанная зона опасности
Цель на курсе, ведущем к
Сейчаснет опасности Ширина диаграммы направленности, град:
Коэффициент усиления, дБ 32 Уровень боковых лепестков, дБ: в секторе ±10' 27
2, 1 20 27
25 столкновению Дистанция, проходимая в б мин (вектор за пределами ±10' 33 25
опасности своего судна}
Место своего
Несущая частота, М Гц Импульсная мощность, кВт Передатчик.
9410 1-0
3060 25 Непрослеженная цель судна Длительность импульса, мкс Частота повторения, импjс 0, 06-0, 35-0, 8
0, 06-0, 35-0, 8 2800-1400-700 Рис. 23.9. Отображение радиолокационной информации в виде зон опасностей
САРП, как правило, включает две НРЛС, одна из которых рабо- , тает в трехсантиметровом, а другая в десятисантиметровом диапа зоне длин волн, что обеспечивает их эффективное функциониро вание в различных гидрометеорологических условиях. В табл. 23.2 представлены эксплуатационные характеристики Промежуточная частота, МГц
Импульсная чувствительность, дБ: в режиме " короткий импульс" в режиме " длинный импульс"
'-)ффективный диаметр радиолока ционного изображения, мм 60 20 и4
125 132
270 60 20 и4
125 132
270 современных отечественных НРЛС, используемых в составе САРП. Эти НРЛС имеют следующие возможности: • яркое цветное изображение с высоким разрешением на жидко Illкалы дальности, км '1 исло элементов разложения отображения 0, 25-128 1280 х 1024 0, 25-128 1280х1024
• отображение обобщенной информации о своем судне (геогра • следы относительного движения целей с регулируемым врем нем их длительности; фические координаты, курс, скорость, глубина под килем, те• кущее время); • межобзорное накопление; • увеличение масштаба выбранного участка изображения с от • автоматическое сопровождение до 50 целей с индикацией пар метров движения и параметров сближения с предупреждени об опасности столкновения и имитацией маневров на расхо дение (САПР); дельной его индикацией на дополнительном поле экрана; • ориентацию изображения: КУРС, СЕВЕР, КУРС СТАБ; • вывод данных САРП в систему отображения морских электро ныхкарт;
• измерители координат целей (визиры направления и.цaJlDnv•....-:: -. ти, электронная линейка и координатный маркер); • автообнаружение и сигнализация о нахождении целей в vл...., a.n1! '1 ной зоне; • стабилизацию изображения и графической информации отн сительно воды и грунта; • электронную карту и контроль плавания по маршруту; • контроль якорной стоянки.
332 Раздел 6. Использование радиотехнических средств в навигации
23.5 Особенност и использования РЛС Глава 23. Использование судовых радиолокационных станций
11ие радиолокационного курсового угла (РЛКУ)- угла между це |
Последнее изменение этой страницы: 2019-05-04; Просмотров: 417; Нарушение авторского права страницы
 работы каждого радиомаяка составляет 1 мин, поэтому в этом слу- чае полный цикл излучения группы составляет 6 мин. ..
работы каждого радиомаяка составляет 1 мин, поэтому в этом слу- чае полный цикл излучения группы составляет 6 мин. ..

 ! Jюва 22. Определение места судна с помощью круговых рздиомаяков
! Jюва 22. Определение места судна с помощью круговых рздиомаяков












 \Jудет следующей:
\Jудет следующей:  Пример. Определили место по " Лоран-С". Погрешность и рения промежутка времени т м= 0, 3 мкс. С карты взяли рас
Пример. Определили место по " Лоран-С". Погрешность и рения промежутка времени т м= 0, 3 мкс. С карты взяли рас Решение.
Решение. ность до объекта D = ctзf2. Направление (азимут) на объект опреде ляется с помощью антенны направленного действия. При повороте антенны в горизонтальной плоскости, когда цель окажется в преде-
ность до объекта D = ctзf2. Направление (азимут) на объект опреде ляется с помощью антенны направленного действия. При повороте антенны в горизонтальной плоскости, когда цель окажется в преде-
 При использовании РЛС необходимо учитывать, что сильные осадки (ливни, град, снежные заряды) уменьшают дистанцию об наружения объектов на 30-50%, а наличие качки снижает точ ность измерений. В этих условиях наблюдение необходимо вести при длине волны РЛС 10 см. На условия наблюдения влияет нение моря, вызывающее засветку центральной части экрана отражениями от волн.
При использовании РЛС необходимо учитывать, что сильные осадки (ливни, град, снежные заряды) уменьшают дистанцию об наружения объектов на 30-50%, а наличие качки снижает точ ность измерений. В этих условиях наблюдение необходимо вести при длине волны РЛС 10 см. На условия наблюдения влияет нение моря, вызывающее засветку центральной части экрана отражениями от волн.
 М 0 =-1.- т +2 mD 2, (2
М 0 =-1.- т +2 mD 2, (2
 Если при определении по трем расстояниям окружности не
Если при определении по трем расстояниям окружности не РСКП определения места судна в этом случае рассчитывается по формуле
РСКП определения места судна в этом случае рассчитывается по формуле
 Курс на карте
Курс на карте м = [ т лл
м = [ т лл
 плохо. Низкие пляжи, песчаные косы, ледовый припай у берега руживаются лишь на малых расстояниях или даже не наблюдаются.
плохо. Низкие пляжи, песчаные косы, ледовый припай у берега руживаются лишь на малых расстояниях или даже не наблюдаются. 320 Раздел 6. Использование радиотехнических средств в навигации
320 Раздел 6. Использование радиотехнических средств в навигации
 тых, обрывистых берегов.
тых, обрывистых берегов.

 РЛМк может быть использована формула (23.5). Однако точно определения места судна в этом случае ниже, чем по четким
РЛМк может быть использована формула (23.5). Однако точно определения места судна в этом случае ниже, чем по четким (
( яка совпадает с частотой, на которую настроена судовая РЛС. Та ким образом, за время одного периода изменения частоты проис ходит один раз совпадение частот маяка-ответчика и судовой РЛС, и сигналы маяка появляются на экране РЛС через проме жутки времени, соответствующие периоду " качания" частоты, который обычно равен 60-120 с.
яка совпадает с частотой, на которую настроена судовая РЛС. Та ким образом, за время одного периода изменения частоты проис ходит один раз совпадение частот маяка-ответчика и судовой РЛС, и сигналы маяка появляются на экране РЛС через проме жутки времени, соответствующие периоду " качания" частоты, который обычно равен 60-120 с.
 Рис. 23.6. Спиральный пассивный отра
Рис. 23.6. Спиральный пассивный отра
 Рис. 23. 7. Шестиуголкавый пас
Рис. 23. 7. Шестиуголкавый пас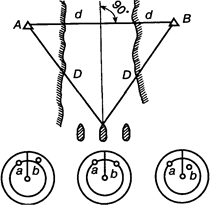
 Ниже приводятся основные из них:
Ниже приводятся основные из них:  (САРП) предназначено для предупреждения столкновения судов подготовки принятия рационального решения по выбору
(САРП) предназначено для предупреждения столкновения судов подготовки принятия рационального решения по выбору В САРП применяются два способа отображения IJ< l, ЦYliJJl\J" -'•ц.,.
В САРП применяются два способа отображения IJ< l, ЦYliJJl\J" -'•ц.,. 330 Раздел 6. Использование радиотехнических средств в навигации
330 Раздел 6. Использование радиотехнических средств в навигации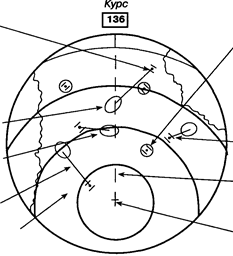
 Технические параметры НАЯДА-25Мl
Технические параметры НАЯДА-25Мl Скорость вращения антенны, об/мин 24 24
Скорость вращения антенны, об/мин 24 24 • режимы относительного и истинного движения со см1еuце1: -rием центра развертки в пределах 2/3 радиуса изображения;
• режимы относительного и истинного движения со см1еuце1: -rием центра развертки в пределах 2/3 радиуса изображения;