
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
и оrраящающи х линий положения⇐ ПредыдущаяСтр 11 из 11
Общие сведения. При плавании вузкостях для наиб сложных участков на картах или планах наносятся сетки навиг онных изолиний, как правило, относительно двух или трех ор тиров. Такие сетки существенно сокращают объем вычислит ных и графических работ при определении места судна. но к немедленному действию, а машина - к изменению режима работы или немедленной остановке. В районах, где судну придет ся следовать уменьшенным ходом, на карте делается пометка с Изолинии выбранных ориентиров на заданном участке ма рута перехода должны пересекаться по возможности под угл близкими к прямым. Каждое семейство изолиний наносится указанием режима работы машины. Особой пометкой вьщеляется плавучее ограждение опасностей, служащее не для обсерваций, а лишь для общей ориентации. им отличительным цветом с интервалом, не затеняющим об новку на карте и обеспечивающим надежную интерполяци глаз. При перемене курсов на границе секторов освещения цветных огней не следует полагаться на то, что можно будет легко и быстро уловить момент перехода освещения огня от одного цвета к друго му. Ввиду этого для таких поворотов нужно заранее проложить пе В зависимости от необходимой точности определения ме наблюдаемости ориентиров и имеющихся на судне техниче средств судовождения строятся, как бьшо перечислено выше, дующие сетки навигационных изолиний: гониометрические, ленги границ секторов освещения и записать их компасное значе мутальные, стадиометрические, комбинированные и ряд други ние. Поворот на новый курс необходимо начинать в момент при хода судна на данный пеленг. Нахождение места судна по вспомогательным меткам изоли заключается в следующем. В случаях невозможности прохода узкости в ночное время должно быть заранее предусмотрено место якорной стоянки. Вы По измеренным горизонтальным углам между несколькими реговыми предметами на гониометрических сетках находят м бор места ночной якорной стоянки может производиться в соот судна между изолиний, соответствующих этим измеренным уг ветствии с указаниями лоции и с таким расчетом, чтобы до него На азимутальных сетках по измеренным пеленгам на берего
Места якорных стоянок следует отметить пеленгами или рас стояниями до ориентиров и сделать об этом отметку на карте. ориентиры находят место судна между изолиний пеленгов. По меренным расстояниям, определенным радиолокатором или считанным по измерению секстаном вертикального угла и вы
Фарватер Глава 28. Плавание в стесненных водах
Рис. 28.1. Гониометрическая сетка
предмета на стаднометрических сетках также находят место между изолиний соответствующих расстояний.
районах, где возможно определение места судна. Вдоль каж изолинии выполняется надпись соответствующего ей угла. Азимутальная сетка. Если на карте нанесены два или три хор видимых на местности ориентира, то строят сетку из двух или На комбинированных сетках нахождение места судна выпол няется аналогичным образом, используя соответствующие пара метры. Гониометрическая сетка. Такая сетка применяется для получения на карте места судна, определенного по двум горизонтальным уг лам, измеренным между двумя парами ориентиров. Для графичес семейств лучей, расходящихся от намеченных для пеленгова ориентиров А, В и С (рис. 28.2). Направления лучей должны соответствовать истинным пе гам на эти ориентиры, и, в зависимости от масштаба карты, пр дятся через 2 - 3°. Линии истинных пеленгов наносятся разн цветами и у каждой линии пеленга надписывается его значе кого построения гониометрической сетки соединяют прямыми линиями точки А и В (рис. 28.1), соответствующие местам одной Ориентиры следует выбирать так, чтобы пеленги пересекались углом в пределах 30 - 150°. пары ориентиров на карте, и точки В и С, соответствующие местам положения второй пары ориентиров. При этом необходимо со блюсти условия, исключающие случай неопределенности. Через середины прямых линий, соединяющих ориентиры, про Стаднометрическая сетка. Сетка изостадий проводится на кар виде дуг двух или трех изолиний, являющихся окружностями. линии (дуги окружностей) проводятся из мест видимых орие ров, как из центров (рис. 28.3) радиусами, равными измерен водятся перпендикулярные линии. Задавшись рядом углов а 1, а2, расстояниям до них. Если расстояния до ориентиров измеряют
одного из ориентиров строят углы 90°- а 1; 90°- а 2 , 90°- аз и т. д. Стороны углов, пересекаясь с перпендикуляром, дадут центры ок ружностей, вмещающие эти углы. Таким же образом строится и второе семейство окружностей, опирающихся на вторую пару ори ентиров. Дуги изолиний необходимо проводить на карте только в помощью судового радиолокатора, то на изолиниях надписыва ся значения соответствующих расстояний. Если расстояния до видимых ориентиров рассчитываютс измеренным секстаном вертикальному углу и высоте предмет на изолиниях указывается значение соответствующего им ве кального угла (рис. 28.4).
396 Раздел 8. Методы навигации в особых условиях плавания Глава 28. Плавание в стесненных водах
Линия курса судна
+ i+
Рис. 28.3. Стаднометрическая сетка Навигационный параметр, которому соответствует огражд щая изолиния, называют ограждающим параметром. В зависимости от расположения приметных ориентиров та Кроме рассмотренных сеток, на карту могут наноситься сетки, образованные комбинированными системами изолиний, напри ми параметрами могут быть: ограждающее расстояние, огражд щий горизонтальный угол и ограждающий пеленг. мер для обсерваций по пеленгу и расстоянию, по горизонтальному и вертикальному углам и т. п. Если судно следует курсом вдоль берега, изобилующего надв ными и подводными опасностями, а на берегу наблюдается в Ограждающие изолинии. При плавании среди опасностей, рас положенных вблизи берега, когда нет возможности точно опреде один ориентир А, показанный на карте, может быть использов ограждающее расстояние (рис. 28.5, а). лить место судна, при неуверенности в поправке компаса, при от сутствии приметных мест на берегу, важно иметь уверенность, что судно пройдет подводную или надводную опасность в безопасном расстоянии. Для этого на карте из точки А места ориентира проводят окр ность радиусом D с таким расчетом, чтобы все навигацион опасности и некоторая часть чистой водной поверхности ок лись внутри этой окружности. Радиус данной окружности D и В этом случае могут бьпь использованы ограждающие изолинии, положения которых подбирают с учетом ограждения опасных зон. дет тем ограждающим расстоянием, ближе которого нельзя п ближаться к ориентиру. Измеряя расстояние до ориентира DfJ, ко контролировать выполнение условия безопасности: DP > D. Если на берегу в пределах видимости с судна наблюдаются
рами А и В (рис. 28.5, б). Периодически измеряя секстаном гориз тальный угол а между ориентирами, сравнивают его с ограждаю углом, контролируя тем самым выполнение условия безопасност Иногда пеленг какого-либо ориентира может ограждать оп ности и непосредственно предупреждать судоводителя о приб жении к опасности. Чаще всего судоводители в узкостях используют ограждаю
для вертикальных углов
пеленг (рис. 28.5, в). Видно, что при использовании ориентир условие безопасности следующее: ип> ипогр·
Глава 28. Плавание в стесненных водах
Часто сведения об ограждающих пеленгах даются в лоциях. Ог раждающий пеленг может быть заменен створом двух каких-либо четко распределены функциональные обязанности, обеспечи щие параллельную обработку навигационной информации, на объектов, нанесенных на карту. В ночное время ограждающими пеленгами могут служить гра новании которой капитан оценивает обстановку и принимает тимальное решение по управлению судном. ницы между секторами огней маяков, отличающихся по цвету. Границы секторов имеют низкую точность и поэтому они долж ны обязательно проверяться по компасу. При плавании вблизи берегов и в узкостях, особенно малоис Большое значение приобретает взаимоконтроль между пом никами капитана при решении задач судовождения, дублиров всех основных элементов контроля за местоположением и движ ем судна разными методами, различными техническими средств следованных, большим подспорьем может оказаться ограждающая изолиния - изобата. Наблюдая за показаниями индикатора вклю ченного эхолота несложно заметить выход судна на глубины, ме Плавание в узкостях осуществляется только по фарватерам, налам и рекомендованным курсам, точно по створам или при живаясь правой стороны разрешенной полосы движения, так нее ограждающей. любое небольшое отклонение от рекомендованного курса мо В районах, требующих для безопасности судна точного плава ния по фарватерам и рекомендованным курсам, устанавливаются быть опасным для судна. Плавание должно проходить в соотве вии с предварительной прокладкой. Счисление пути судна дол створы. Для обеспечения безопасного плавания в узкости исполь зуют створы ведущие, секущие, ограждающие. Ведущие створы используются для удержания судна во время плавания точно по вестись особенно тщательно на откорректированных и подня картах масштаба 1: 50 000 и крупнее. При плавании в узкостях руководствуются следующим. назначенной линии положения. Секущие створы дают линию по 1. При подходе к узкостям со стороны моря необходимо рас ложения, пересекающую ведущий створ, и указывают точки пово рота на другой створ или дают пройденное расстояние по ведуще лагать курсы перпендикулярно линии, соединяющей наиболее кие участки входа в стесненные для плавания районы. Вход в му створу. Ограждающие створы ограждают какую-либо опас ность, как и опасные пеленги. Для обеспечения безопасности плавания в узкостях, особенно в кость начинается с подходного буя, которым обозначается нач рекомендованного пути. Выход судна к бую производится на ос ве надежной обсервации. ночное время и в условиях неудовлетворительной видимости, ис пользуются лазерные и телевизионные створы, береговые РЛС, а 2. Место судна при подходе к узкости может быть уточнено измеренным глубинам. для ограждения навигационных опасностей, для обозначения ли 3. При следовании узкостью управление судном осуществля ний рекомендованных путей, фарватеров, границ каналов и других безопасных проходов в различных условиях видимости устанавли вается плавучее ограждение. ся на основе ускоренных (лоцманских) методов контроля за мес положением и движением судна- использование ведущей, огр дающей, контрольной изолиний, применение методов визуаль
28.4 Навиrацишmые особеmюст и mавания вузкостях или радиолокационной глазомерной проводки судна. По радио лефону необходимо проелушивать два канала - дежурный кана канал СУДС. 4. Все проходимые ориентиры отмечаются по времени на лин Наличие и близость навигационных опасностей, а также частое изменение курсов придают судовождению в узкостях весь пути, а ориентиры плавучего ограждения сличаются с указанны на карте или в лоциях и пособиях " Огни и знаки", проверлю ма сложный и напряженный характер. Плавание в узкостях требует четкого и постоянного контроля за названия, окраска, вид топовых фигур, характер и цвет огня ночное время ориентиры освещаются прожектором. При распо перемещением судна с заранее спланированными обсервациями, которые должны выполняться наиболее быстрыми способами, жении ориентира на траверзных курсовых углах на него измеря ся пеленг, а при острых курсовых углах- дистанция до ориенти обеспечивающими максимальную точность. Любой маневр в узко сти должен выполняться только на основе предварительного рас 5. Контроль за безопасностью плавания производится вахт ным помощником капитана по обсервациям с использованием в
имеющихся на судне навигационных и радиотехнических средс
Глава 29. Плавание в районах регулирования движения судов
с применением сеток изолиний и ограждающих линий положения. Обсервации производятся как можно чаще и для этого в первую обучения судоводителей методам обеспечения безопасности м плавания в условиях интенсивного судоходства. очередь используются искусственные береговые ориентиры, во Транспортный поток судов (судопоток) - это совокупност вторую очередь -естественные ориентиры береговой черты и лишь дов, движущихся на определенном участке морского пути по о
деленному маршруту в условиях динамического взаимодейс
6. Точка и время поворота на новый очередной курс рассчиты вается по обсервации с таким расчетом, чтобы после нанесения ее на карту последующими определениями можно бьmо уточнить время начала поворота. 7. При поворотах на новый курс обязательно учитывается цир куляция судна с учетом сноса течением и воздействия ветра с та ким расчетом, чтобы после поворота судно точно находилось на новой намеченной линии пути или на линии створа. 8. При поворотах близи подводных опасностей не допускается " срезать утлы" для сокращения расстояний и заходить за изоли нию, ограждающую опасности. друг с другом. Судопоток- сложная динамическая система, о дающая такими свойствами, которых не имеют отдельные суд ставляющие этот поток. Распределение судов в потоке по ширине судоходного п ранства зависит от степени стесненности этого пространства тановленной организации движения судов. Так, на фарватере носторонним движением ось судопотока обычно совпадает с фарватера (створом), максимальные отклонения не выход пределы безопасной полосы. На фарватерах с двусторонним жением встречные судопотоки разделены, т. е. наблюдаетс распределения судов относительно оси фарватера. Если ось ф тера четко обозначена на местности (например, осевыми бу то вероятность выхода судна на полосу встречного движения и судопотоки практически не пересекаются. Если же осевая л
не обозначена, вероятность выхода судов на полосу встреч плавдоков, земснарядов и вблизи стоящих судов и т. д. необходимо движения повышается. Наконец в районах без навигационны уменьшать ход до минимума, чтобы избежать явления присоса. 10. При уменьшении видимости и неисправном радиолокаторе не рекомендуется входить в узкость, а если судно находится в узко сти, необходимо стать на якорь. В плохую видимость не входят в раничений судопотоки наиболее " размыты" и не имеют че границ. На маршрутах открытого моря ось судопотока совпадает с мендованными наивыгоднейшими путями. При этом высок узкость, если ее ширина меньше двойной минимальной рабочей ные навигационные (в том числе спутниковые) системы умен дальности действия радиолокационной станции. ют отклонения судов от предварительной прокладки и тем са
Глава 29 ПЛАВАНИЕ В РАЙОНАХ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ способствуют концентрации судов на рекомендованных и о мальных путях, повышая частоту встреч и опасность столкнов в открытом море. В прибрежном плавании центрами, формирующими су ток, являются узловые точки- выступающие в море " поворот мысы (острова) и/или расположенные около них системы раз 29. J Транспорmы й поток судов ния движения, где плотность судов наибольшая. При малых стояниях между узловыми точками суда следуют вдоль побер Увеличение плотности и интенсивности движения судов на основных морских путях, в международных проливах, на подхо дах к крупным портам привело к формированию мощных судопо довольно плотными, узкими потоками, однако при больших стояниях судопоток начинает постепенно " размываться". П ние ближе к левой (внутренней) кромке судопотока более оп токов, усилению взаимосвязей между движущимися судами, пере ходу от плавания одиночного судна к групповому плаванию судов. так как повышается вероятность встретить судно, идущее в л части встречного судопотока. Если правая (внешняя) кромка Это, в свою очередь, потребовало изучения закономерностей груп потока обращена к побережью, то при плавании в правой част пового плавания, методов управления потоками судов, а также допотока повышается вероятность встречи с каботажными, р
ловными, прогулочными судами. В средней части судапотока плотность движения судов наибольшая. Потоки судов различают по продолжительности функциониро
Система организационных и технических мероприятий для упо рядочения движения судов в потоке с целью повышения безопасно сти мореплавания, достижения наибольшей надежности и эффек тивности транспортной системы в заданном районе называется уп равлением потоком судов. Потребность в управлении потоком воз никает прежде всего там, где наиболее интенсивное движение су дов, сложные условия плавания, часты навигационные аварии. Методы управления потоком судов подразделяются на актив ные и пассивные. Активные методы заключаются в регулировании и управлении движением судов в районе с помощью береговых РЛС, постов регулирования движения судов, систем управления движением судов. Пассивные методы предполагают целенаправ
 ..·. ..·.
Рис. 29.1. СРД линейного типа
Секторное разделение движения используется там, где сход потоки судов, идущих с различных направлений (рис. 29.2). ленное воздействие на судапоток с помощью системы правил, вве В узловых точках схождения потоков вводятся районы круг дения установленных путей, запретных для плавания районов, си стемы радиолокационного контроля за судоходством и информа го движения или районы повышенной осторожности плава Там, где соединяются или пересекаются пути, также вводятся ции о движении судов в районе. оны пересечения, районы соединения, районы повышенной о рожности плавания. Полосы движения должны прокладыва так, чтобы оптимально использовать имеющиеся глубины; ма Плавание в системах разделения движения судов
Общие принципы установления путей движения судов (Routing) приняты Ассамблеей ИМО [Резолюции А.378(Х) от 14.11.1977 г. и A.428(XI) от 15.11.1979 г.] и изложены в руководст вах ГУНиО N2 9036 и N2 9037. Эффективным средством пассивного управления судапотока мальная ширина полос движения и зон разделения должна у
\ 1 1
ми является система разделения движения (СРД) - разделение встречных потоков судов посредством установления зон и/или ли ний разделения и полос движения. Наиболее часто используются СРД линейного типа (рис. 29.1). Установленная зона прибрежного плавания удерживает суда местного плавания на достаточном расстоянии от СРД, а тран зитные суда - от приближения к берегу и навигационным опас ностям.
Рис. 29.2. Секторное разделение движения ' [t'lJI gy// '
404 Раздел 8. Методы навигации в особых условиях плавания
навливаться исходя из точностных возможностей способов опре деления места судна в соответствии с требованиями к техническим средствам судовождения. Единственным международным органом, ответственным за установление СРД, является ИМО. Однако правительства при брежных государств вправе самостоятельно вводить СРД в во Глава 29. Плавание в районах регулирования движения судов
• для избежания непосредственной опасности; • при лове рыбы; • при гидрографических работах в пределах зоны разделения дах, находящихся под их юрисдикцией, информируя об этом ИМО и заблаговременно оповещая всех через систему " Извеще ний мореплавателям". Плавание по СРД, одобренным ИМО, Судно должно, насколько это практически возможно, избе пересечения полос движения, но если оно вынуждено пересе полосу движения, то должно делать это, насколько возможно, регламентируется Правилом 10 МППСС-72. Правила плавания сом под прямым углом к общему направлению потока движен в национальных СРД устанавливает прибрежное государство и они могут существенно отличаться от Правила 10. Даже если объявленная СРД не одобрена ИМО и не является обязательной для исполнения, хорошая морская практика требует от судово дителя следовать в соответствии с этой системой до тех пор, по ка другие более важные обстоятельства не заставят его изменить это решение. В соответствии с Правилом 10 судно должно в общем случае входить в полосу движения СРД или покидать ее на конечных участках, но если судно покидает полосу движения или входит в Существует широко распространенное убеждение о привил рованном статусе судов, использующих СРД для транзитного хода. Однако в соответствии с Правилом 10(а) плавание по " не освобождает никакое другое судно от его обязанностей, в кающих из любого другого Правила". При плавании в судапотоке оптимальной (с точки зрения нимума обгонов) является скорость судна, равная средней ск сти ближайших судов, следующих в той же полосе движения. рость судна, несколько превышающая это значение, более пре чтительна, чем несколько меньшая, так как отводит своему с нее с любой стороны, оно должно делать это под возможно мень активную роль при обгонах, однако в любом случае скорость до шим углом к общему направлению потока движения. При плава нии вблизи конечных участков СРД необходимо соблюдать осо бую осторожность, так как движение судов здесь не является упо рядоченным, выбор ими курсов может быть достаточно произ вольным, а изменения курсов - неожиданными. Судно, не ис пользующее СРД, должно держаться от нее на возможно боль шем расстоянии. Судно, использующее СРД, должно следовать в соответствую щей полосе движения в принятом на ней общем направлении по на быть безопасной. При ограничении или запрещении обг скорость судна подбирается такой, чтобы не допустить чрезме го сближения с судном, идущим впереди. Безопасной дистанцией до впереди идущего судна, считаю кую дистанцию, которая позволяет избежать столкновения экстренном его торможении. Важнейшим фактором является своевременное обнаруж торможения впереди идущего судна. Порог замечаемого изм ния скорости цели может быть принят равным 20-30% от ис тока движения и держаться, насколько это практически возможно, в стороне от линии (зоны) разделения движения. Учитывая это об стоятельство, при предварительной прокладке путь судна реко ной. Более надежные результаты дает контроль дистанций по Р В большинстве случаев безопасной считается дистанция до по ного судна по носу не менее десяти корпусов судна. мендуется прокладывать по середине полосы движения, если справа по ходу за границей полосы движения находится зона при брежного плавания или опасный район. Если же за правой грани Достаточным считается расстояние до судна-попутчика ок 4-8 кбт справа, 3-6 кбт слева, 3-4 кбт по корме. Следует, о ко, иметь в виду, что в теневом секторе близко идущего попут цей полосы движения опасности нет, то путь судна лучше распола гать в 2/3 ширины полосы движения от зоны разделения. При фак тическом плавании путь судна может быть скорректирован в зави симости от обстановки. может скрываться опасная цель. Особого внимания требуют с попутчики, дистанция до которых монотонно уменьшается, а же приближение к повороту СРД. Учитывая, что точность плавания по СРД зависит от точн Судно, если оно не пересекает СРД, не входит в полосу движе применяемых методов контроля за местом и движением су
возможны случаи выхода судна на полосу встречного движе 406 Раздел 8. Методы навигации в особых условиях плавания
Судно-нарушитель должно быть проинформировано о нарушении правил плавания любым другим судном как по радиотелефону, так и по МСС. Предусмотрен сигнал " YG" - " Вы, кажется, не соблю даете правила плавания в системе разделения движения". Существенным элементом разделения движения судов является жесткий контроль за соблюдением правил со стороны прибрежно дотвращения навигационных аварий, обеспечения безопа плавания судов и координации их действий в стесненной на ционной обстановке. Зона действия ПРДС (СУДС), проце контроля и регулирования движения судов, правовые взаимо шения и ответственность четко оговариваются в местных пра плавания. В отечественной практике разработано " Типовое го государства- с помощью береговых РЛС, патрульных кораблей, авиации. Предусматриваются информация о судах-нарушителях и определенные санкции по отношению к ним. Если обстоятельства вынуждают судно нарушить правила плавания (например, для из жение о СУДС", на основе которого в портах разрабатыва собственные " Положения о СУДС (ПРДС)", учитывающие с фику местных условий. Различают радиолокационный контроль, радиолокацио бежания непосредственной опасности), необходимо немедленно сообщить об этом по радиотелефону на береговую станцию кон троля. проводку судов, регулирование движения судов, управление жением судов в контролируемом районе. Радиолокационный контроль - постоянный систематич Если в СРД предусматривается периодическая подача радиоин обзор рабочей зоны РЛС с целью заблаговременного обнаруж формации на береговой центр о местоположении и движении суд возникновения опасной ситуации (сближение контролируе на, то пометки об этом должны быть заранее нанесены на путевую карту в соответствующих точках, а тексты сообщений подготовле ны заранее. Суда по возможности не должны становиться на якорь в райо нах СРД или вблизи конечных участков СРД, чтобы не мешать движению судов и не подвергаться опасности столкновения. судна с опасностью, сближение контролируемых судов межд бой, появление судна, нарушающего правила, и др.) и своевр ного предупреждения ее развития в нежелательном направле Радиолокационная проводка - инструментальное (с пом БРЛС) определение текущих координат судна (маршрутны полярных) и передача их на судно с необходимой частотой. П
29.3 Плавание в районах регулировани я движени я судов ными координатами называют пеленг на судно и дистанцию д го от БРЛС либо от оговоренного навигационного ориентира са, маяка, входного мола порта и др.), по которым текущее судна наносится судоводителем на навигационную карту. Пог Плавание судов на подходах к портам и в портовых водах часто осуществляется на предельно малых глубинах, при малых от ношениях сечения канала к площади мидельшпангоута судна, на малых скоростях, при которых в наибольшей степени сказывается снос от ветра и течения, ухудшается управляемость судна. Как пра вило, подходы к портам и портовые акватории находятся во внут ность определения текущего места судна при этом составляе рядка 0, 5 кбт. Маршрутными координатами называют текущее боковое нение судна от оси канала (фарватера) и расстояние до ближа поворотной точки. Для судоводителя маршрутные координат лее информативны и оперативны. Они не требуют прокладк ренних или территориальных водах, где установлены местные пра вила плавания, имеется лоцманское обслуживание, а в крупных ленгов и дистанций на карте, поэтому при радиолокационной водке маршрутные координаты используются чаще, чем п портах - береговые радиолокационные станции (БРЛС), посты ные, хотя при этом на лоцмана-оператора возлагается допо регулирования движения судов (ПРДС) или системы управления движением судов (СУДС). Местные правила, учитывающие спе цифику местных условий, могут существенно отличаться от МППСС-72. Особого внимания требует плавание вблизи границы зоны действия местных правил из-за опасности различной трак тельная обязанность- определять боковое уклонение судна о нии заданного пути (ЛЗП). Полученные данные лоцман-опе передает на судно для управления им: " Вы в 5 м левее оси кан Вы в 8 м левее оси канала, возьмите 2° вправо...". В сложных виях плавания информация передается обычно 2 раза в мин товки ситуации на судах в процессе расхождения. при большом уклонении судна - вдвое чаще, то есть каждые
кращения простоев судов по метеорологическим причинам, пре- Если лоцман-оператор оценивает смещение судна с ЛЗП г мерно, относительно нанесенной на дисплей БРЛС " элек
Глава 29. Плавание в районах регулирования движения судов
ной" оси фарватера, то погрешность определения смещения судна с ЛЗП зависит от используемой шкалы БРЛС. сти от конкретных обстоятельств, установление определе скоростей судов и дистанций между ними. В автоматизированных БРЛС, где предусмотрено аналитичес Судно, стоящее на якоре или у причала, входящее в зону д кое преобразование измеренных полярных координат судна в мар шрутные, СКП определения уклонения судна с ЛЗП ту= 0, 9 кбт. вия СУДС или проходящее через нее, должно до начала движ (либо при подходе к зоне) установить связь с Центром Высокоточные БРЛС обеспечивают возможность радиолока (ЦСУДС), запросить разрешение на движение и в дальнейше ционной проводки судов на дистанциях до 6 - 7 миль по фарвате сти постоянную радиовахту на рабочем канале центра (поста рам шириной до 200 м при одностороннем движении и до 300 м - при двустороннем. В конкретной обстановке возможность и безо пасность радиолокационной проводки определяются технико диообмен центра (поста) с судами и текущая навигационная о новка документируются. Центр (пост) дает разрешение на вход в свою зону только эксплуатационными параметрами БРЛС и СУДС, профессиональ надежного опознавания эхосигнала судна на экране БРЛС (п ными качествами лоцмана-оператора и судоводителя, размерени лярным координатам относительно определенного ориентир ями и маневренными возможностями судна, характеристиками фарватера, гидрометеорологической обстановкой и др. Компью выполнению судном обусловленного маневра, по радиопе судна и другими указанными в Правилах плавания методами терная вторичная обработка радиолокационной информации по лученное разрешение на движение или вход в зону действия С вышает ее точность, а возможность наложения этой информации на электронную карту облегчает оператору оценку складывающей ся ситуации. Важно помнить, что в БРЛС обработка информации осуществ ляется относительно центра эхосигнала от судна. Лоцман-опера тор фиксирует на экране уклонение эхосигнала относительно " электронной линии" оси фарватера. Но центру эхосигнала соот ветствует, как правило, центр одной из оконечностей судна - но совой или кормовой - в зависимости от курсового угла судна. Не действует, как правило, в течение 30 мин и в случае заде должно быть возобновлено. Судно обязано репетовать все от щиесяк нему указания центра (поста). Плавание в зоне действия СУДС (как с лоцманом, так лоцмана на борту) не снимает с капитана ответственности действия по управлению судном и безопасность судна. Инф ция, выдаваемая лоцманом-оператором ЦСУДС, носит рек дательный характер. Однако в быстроменяющейся ситуации и оператор ЦСУ учет данного эффекта нередко становился причиной касания грунта при радиолокационной проводке судна по узкому открыто капитан судна должны учитывать множество обстоятельств. В большей информированности оператор ЦСУДС лучше кап му фарватеру. знает текущую обстановку, действия и намерения других с На основе информации о месте, передаваемой лоцманом-опе правила плавания в районе, степень нарастания опасности с ратором БРЛС, судоводители управляют судном, корректируют его курс и/или скорость с учетом навигационной обстановки. Та кой метод проводки называется пассивным. Активный метод дис танционной радиолокационной проводки предполагает управле ции. Его единственное решение будет, по-видимому, всегда л двух (или нескольких) противоречивых решений капитанов жающихся судов. Именно поэтому международными и мест правилами оператору СУДС предоставлено право управлени ние всеми маневрами судна лоцманом-оператором СУДС по ра диотелефону. Этот метод, обеспечивающий высокую точность проводки на прямолинейных каналах, не дает хороших результа тов на извилистых фарватерах, так как лоцман-оператор не знает маневренных характеристик и особенностей поворотливости суд на, особенно в условиях сильного ветра. Регулирование движения судов предусматривает выдачу им раз жением судов. Обычно обязательными для выполнения явля указания оператора СУДС, касающиеся очередности и мар движения, порядка расхождения судов, действий для предотв ния опасного сближения, якорной стоянки. Капитан, не в нивший указание СУДС, несет ответственность за это как за шение обязательных постановлений по порту и правил плава Капитан судна вправе не выполнить указание опер решений на вход в зону действия системы, отход от причала, съем ЦСУДС, если это невозможно, либо связаноснепосредстве
значение очередности, порядка и маршрута движения в зависимо- опасностью для судна, сообщив незамедлительно причину о оператору. ЦентрСУДСнесет ответственность за переданну 410 Раздел 8. Методы навигации в особых условиях плавания
формацию в пределах точности используемых технических средств, известных капитану. Аварийные убытки, происшедшие по вине СУДС, должны возмещаться по тому же принципу, что и в • включить РЛС и САРП, начать радиолокационное набл ние; • перевести работу УКВ-радиостанции в " Дежурный прием" случае аварии судна во время лоцманской проводки.
Глава 30 ПЛАВАНИЕ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ
30.1 Навиrацишmые особенности плавания в условиях ограниченной видимости • включить ходовые огни, выключить или затенить огни, меш щие наблюдению; • определить место судна наиболее точным способом; • перейти с автоматического на ручное управление рулем; • проинструктировать и выставить впередсмотрящего, обесп его надежной связью с мостиком; • предупредить вахтенного механика о возможных реверсах; • согласовать показания часов мостика и машинного отделе • сделать отметку на курсограмме; • сличить показания ГК и МК; При судовождении, особенно в открытом море, необходи мо учитывать гидрометеорологические условия плавания. Это объ ясняется тем, что на безопасность плавания мo: ryr оказывать внима ние такие условия, как ветер и волнение моря, туман, дымка, паре • сличить направления, измеренные на один и тот же ориен по ГКи РЛС; • включить внутрисудовую трансляционную сеть; • при необходимости включить эхолот; ние моря и осадки, облака, приливные явления и характер течений в районе плавания судна. Особое внимание судоводителей должно быть обращено на плавание в условиях ограниченной видимости. В практике принято называть малой видимостью видимость не более 2 миль. Дальность видимости объектов в море зависит от • по указанию капитана вызвать на мостик подвахтенных суд дителей для усиления ходовой вахты; • до прибытия капитана на мостик руководствоваться МППС и местными правилами плавания; • записать в вахтенный журнал время входа в зону ограниче прозрачности атмосферы. В туман дальность видимости может уменьшаться до нуля. Осадки, дождь и снег, также уменьшают дальность видимости. Особенно сильное влияние на дальность ви димости оказывает падающий в тихую погоду снег. Осадки при сильном ветре выпадают зарядами и дальность ви димости в самое короткое время может измениться очень резко. Наличие дождя и снега уменьшает также радиолокационную на видимости, дальность видимости и принятые меры предо рожности.
При плавании в условиях ограниченной видимости следуе • вести систематическое зрительное, слуховое, радиолокац ное наблюдение за окружающей обстановкой, другими су и местом судна; блюдаемость объектов. Плавание в условиях малой видимости, особенно в прибрежной зоне, наиболее сложно и требует от судоводителей большого на пряжения. При приближении тумана, мглы, снегопада и других явлений, снижающих дальность видимости, следует: • предупредить капитана; • уменьшить ход судна до умеренного в соответствии с требова ниями МППСС; выбранная скорость не является постоянной и должна корректироваться при изменении условий и обстоя • использовать методы судовождения, обеспечивающие безо ность плавания; • тщательно вести счисление пути судна с учетом влияния временных факторов и маневренных качеств судна; • определять место судна с необходимой частотой; • усилить контроль за работой навигационных приборов; • маневр для расхождения выполнять на основе полной ин мации с учетом маневренных элементов судна; • уменьшить ход до минимального, достаточного для удерж судна на курсе, и следовать с крайней осторожностью, а
• начать подачу туманных сигналов, согласно действующим в районе плавания правилам; необходимо - остановить движение, если слышен туман сигнал другого судна, находящегося по-видимому впереди его траверза, и имеется опасность столкновения;
Глава 31. Плавание в высоких широтах и во льдах
• контролировать эффективность выполняемого маневра до тех пор, пока другое судно не будет окончательно пройдено и ос реходных качеств и скорости хода судна могут создать благопри ные условия для плавания. тавлено позади; • расхождение с встречными плавающими объектами в открытом Особо важными гидрометеорологическими условиями, спос ными оказать влияние на условия плавания, являются средняя море следует производить на расстоянии не менее 2 миль. ла и преобладающее направление ветра и волнения, повтор
Если приnятые меры предосторожности не обеспечивают безопасное плавание судна, следует стать на якорь или лечь в дрейф. мость штормов и туманов, направления и скорость течений, ле вые условия. При выборе морских путей следует определить оптималь
30.2 Подход к берегу в условиях ограничеmюй видимости
При плавании в условиях малой видимости вблизи бере гов необходимо применять методы судовождения, основанные на гидрометеорологические условия, которые обеспечат наиме шую потерю скорости судна за счет волнения, ветра и течения. Выбор морского пути судна следует осуществлять на осн прогноза повторяемости штормов, видимости и туманов, а та ледовых условий. При этом следует учитывать, что чем больше благовременность прогноза, тем меньше его достоверность. комплексном использовании визуальных методов, РЛС, эхолота, этому целесообразно выбор морских путей производить на осн звукосигнальных средств, навигационного ограждения, радиопе ленгаторных станций. При подходе к берегу в условиях ограниченной видимости не обходимо: • выполнить все мероприятия, которые производятся при плава нии в малую видимость; • при плавании в прибрежной зоне курсы судна следует прокла дыватЪ так, чтобы минимальные расстояния до навигационных опасностей превышали РСКП счислимого места на подходе к этим опасностям не менее чем в три-пять раз; краткосрочных прогнозов, имеющих значительно большую опр дываемость.
Глава 31 ПЛАВАНИЕ В ВЫСОКИХ ШИРОТАХ И ВО ЛЬДАХ
31.J Навиrацишшые условия IVIавания в высоких широтах • курсы судна следует выбирать так, чтобы линии путей не при К району высоких широт относится Северный Ледо ближались к берегу ближе назначенной ограждающей изобаты; • определять место судна всеми доступными способами и оцени вать их РСКП; • назначить курс подхода, перпендикулярный линии берега; тый океан и прилегающие к нему моря Арктического бассей расположенные севернее параллели 70°. Навигационные усло плавания в высоких широтах определяются географическими ловиями. Для высокоширотных районов характерно наличие • соблюдать все меры предосторожности при плаваниивузкостях лярного дня и полярной ночи длительностью до полугода. Мал и прибрежных районах; • непрерывно измерять глубину под килем и сравнивать ее с глу бинами с карты; • с максимальной точностью учитывать влияние дрейфа и тече ния. высоты Солнца и продолжительное его отсутствие над горизонт определяют суровость климата, постоянные отрицательные тем ратуры воздуха и воды в поверхностном слое и, как результат, личие мощного ледяного покрова. Многолетний паковый лед жет достигать толщины 20 м, а плавающие айсберги могут им осадку до 100 м. Ледяной покров и плавающие айсберги находя в постоянном движении под воздействием ветров и течений. 30.3 Выбор морских путей с учетом rидрометеоролоrических условий
При выборе морских путей необходимо учитывать гидро личие мощного ледового покрова определяет сезонность нави ции в данном районе, ограничивает мореплавание. До недавн времени тяжелые паковые льды для судов считались непрохо
мыми. Поход отечественного ледокола " Арктика" к Северно 414 Раздел 8. Методы навигации в особых условиях плавания Глава 31. Плавание в высоких широтах и во льдах
Ледовые условия сушественно затрудняют плавание судов и увеличивают опасность столкновения с айсбергами. Для высоких широт характерно наличие частых туманов, сплош ной многоярусной облачности, что затрудняет наблюдение ледовой и надводной обстановки и значительно ограничивает возможности определения координат места судна по небесным светилам. Недостаточная изученность рельефа дна, течений, ледовых об разований, магнитного склонения и других геофизических эле ментов делает условия плавания в высоких широтах исключитель но сложными. Высокие широты - район недостаточно оборудованный берего Для пояса широт более 85° невозможно создание карт в пря равноугольной цилиндрической проекции Меркатора, поскол с увеличением широты беспредельно увеличивается частный штаб карты: м _ М гп cos< pm ' - cos< p
где Мгп - масштаб по главной параллели; < rгп - широта глав параллели. Действительно, при < р = 90° cos < р = О и М= щ . При < р > 85° неудобна и сама географическая система коор нат, так как незначительная погрешность в пройденном расс нии (отшествии) вызывает значительную погрешность в опред выми средствами навигационного оборудования. Наличие поляр емой долготе. Действительно, дифференцируя формулу анали ных сияний и магнитных бурь вносит помехи в работу радионавига ционных систем, средств связи и магнитных курсоуказателей. Географические и геофизические факторы определяют невоз можность использования при плавании в широтах более 85" тради ционных навигационных средств и методов. С увеличением широты уменьшается направляющий момент гирокомпаса, вызываемый полезной составляющей суточного вращения Земли:
rоп = rocos< psina, ческого счисления для расчета долготы и переходя к конечн приращениям, получим:
или
д(дЛ) = дSsinИKsec< pcp·
При < р = 90° д(дЛ) приближается к бесконечности.
где ro - угловая скорость вращения Земли; < р - географическая ши рота места судна; а - отклонение главной оси гирокомпаса от ме Таким образом, высокие широты не только усложняют усло плавания, но и ставят перед судовождением проблему в части ределения средств и методов навигации. Эта проблема успе ридиана. В широтах около 87" направляющий момент настолько мал, что гирокомпас перестает быть курсоуказателем. Кроме того, с увели чением широты у гирокомпасов возрастают почти все методичес кие и инерционные погрешности. решается созданием навигационных систем и комплексов, обес чивающих как курсоуказание, так и счисление в высоких широ а также наблюдение за ледовой обстановкой. Решена проблема бора картографических проекций для прокладки пути судна в соких широтах, в том числе и в приполярных районах. С увеличением географической широты уменьшается горизон тальная составляющая магнитного поля Земли Для курсауказания и счисления пути судна в приполюсных р онах применяются гироазимуты и инерциальные навигацион
Н= TcosJ,
где Т- напряженность магнитного поля; J- магнитная широта. Следовательно, уменьшается и направляющая сила магнитного системы, ориентированные в системе квазигеографических ко динат, а также системы электронной картографии, решающие дачу счисления в этой же системе координат. Для ведения графической прокладки в высоких широтах пользуются карты равноугольной поперечной цилиндричес
проекции Меркатора, а для отдельных расчетов - карты в це ральной(гномонической)проекции.
Глава 31. Плавание в высоких широтах и во льдах
Успешно решаются при плавании в высоких широтах и пробле мы коррекции координат места и систем курсоуказания. При дрейфе льда в сторону отмели или других опасностей дить в него нельзя, особенно при широкой дрейфующей пол
31.2 Навигацишmые особеmюст и плавания во льдах Не следует входить даже в разреженный мелкобитый лед во вр снегопада, так как в этом случае снеговой покров может спосо вовать связыванию льдин.
Плавание в ледовых условиях является наиболее ответст венным, сложным и напряженным. Оно требует тщательной под готовки судна в зависимости от поставленной задачи, знания об щей характеристики ледовых условий в районе перехода и состоя нияпогоды. Судовождение во льдах осложняется следующими факторами: • частая смена курсов и скорости для маневрирования с целью обхода наиболее тяжелых ледовых препятствий; В практике ледового плавания считается, что неледокольн судну не рекомендуется осуществлять плавание, если спло ность льда превышает 6 баллов.
31.3 Счисление во льдах
Счисление пути судна при плавании в ледовых усло осуществляется по тем же правилам, что и в обычных случаях. • отсутствие плавучих средств ограждения навигационных опас ностей; • затрудненная ориентировка по береговой черте, даже с исполь зованием судовой РЛС; нако очень частые изменения курса и скорости, а также совм ный учет дрейфа судна и льда делают графическую прокл очень громоздкой и сложной. Это вынуждает судоводителей менять некоторые особые приемы счисления. • невозможность во многих случаях использования некоторых конструкций лагов; • несвоевременность навигационных расчетов, связанная с час Если изменение курсов происходит редко, а скорость судна тается более или менее постоянной на каждом частном курс применяется письменное счисление. тым маневрированием, требующим обеспечения безопасности корпуса судна; • трудности в определении и учете дрейфа судна при различных метеорологических условиях.
Путь следования в ледовых районах выбирают с расчетом пла При частых изменениях курса и скорости используется гра ческое счисление, выполняемое на миллиметровой бумаге в к ном масштабе. Генеральный курс, генеральное плавание и счислимая т наносятся на карту каждый час. Когда изменения направления движения судна незначител вания по чистой воде или в местах наиболее слабого и разреженно го льда. Лучше выбрать путь более длинный, но свободный ото то применим метод моментных наблюдений для определе среднего курса и средней скорости за определенный промеж льда. Следует по возможности избегать форсирования даже на первый взгляд узких ледовых перемычек. Общее направление це пи разводий должно быть возможно ближе к генеральному курсу времени. Запись курса и скорости производят через 5-6 мин и рез эти промежутки времени откладывают отрезки плавания п меченному курсу. Эта работа выполняется на чистом листе бу судна. Радиолокационное наблюдение за горизонтом не всегда да в крупном масштабе. Средний курс, среднее плавание и счисли ет возможность обнаружения отдельно плавающих льдин, но явля ется хорошим средством ориентировки для выбора пути во льдах. Проходя сплоченным льдом, не следует входить в места торо место определяются и наносятся на карту каждый час. Однако реднение резко различающихся курсов за час может привес значительным ошибкам.
льды лучше обходить, чем их форсировать. Около айсбергов следу ет проходить на значительном расстоянии, опасаясь их опрокиды вания. Вход в лед осуществляется по направлению, перпендикулярно му к кромке льда, а при волнении - со стороны чистой воды. Для ведения счисления при ледовом плавании обработку блюдений и нанесение места выполняют в следующем порядк • рассчитывают плавания судна через каждые 5-6 мин и св их в таблицу; • если в таблице есть повторяющиеся курсы, их сводят в од соответствующие плавания суммируют;
418 Раздел 8. Методы навигации в особых условиях плавания
• курсы, разнящиеся на 5-1о· в обе стороны, сводят в средние, а плавания суммируют; • все полученные курсы исправляют поправкой !:!.К; • в сводной таблице обработанных наблюдений учитывают на блюдаемый дрейф.
На листе бумаги в выбранном масштабе или на специальных сетках прокладывают осредненные курсы, а по ним откладывают соответствующие плавания. По координатам конечной точки или по генеральному курсу и плаванию на рабочей карте наносится счислимая точка. Поrрешность в счислимом месте зависит от погрешностей в ис тинном курсе, определения скорости, проложеиного по курсу пла вания, от погрешности при учете ледового дрейфа. Поrрешность в истинном генеральном курсе, кроме перечислен ных поrрешностей, содержит систематическую поrрешность самого метода счисления пути при ледовом плавании. Округленные и при ведеиные к средним 5-6-минутные курсы имеют систематическую поrрешность, которая тем больше, чем грубее осредняются курсы. Поэтому счислимое место всегда получается в стороне от истинного. Суммарное расстояние, пройденное по нескольким курсам и принятое за плавание по среднему курсу, всегда дает счислимую точку, которая будет находиться впереди истинного места судна. Глава 31. Плавание в высоких широтах и во льдах ---------------------- ------ ---------------------
А2 А1 ..... 1 \
1 \ 1
Рис. 31.1. Счисление с помощью РЛС относительно наблюдаемых объектов
В дальнейшем счисление ведется относительно этого орие ра. Через каждые 5-20 мин по измеренным пеленгам и рассто ям относительно ориентира А 1 наносятся точки Ц, М 2, кото соединяются прямыми линиями. По мере удаления от ориен А 1 на карту от последнего счислимого места М 2 по пеленгу и стоянию наносится новая хорошо различимая на экране льдина или торос А 2 и дальнейшее счисление ведется относит но этого ориентира. При таком счислении необходимо учиты дрейф от ветра и течение, если они известны.
Если с судна наблюдаются береговые ориентиры и возможно использование радиотехнических средств, то используется обсер вационное счисление, при котором обсервации производят через каждые 5-20 мин. Полученные места соединяют прямыми линия ми и находят фактический путь судна между обсервациями. Пред почтительнее использование в этих целях космических навигаци онных систем. При плавании вдали от береговых средств навигационного оборудования счисление ведется с помощью судовой РЛС по ме стам, наносимым на карту относительно наблюдаемых на экране РЛС айсберга, приметныхльдин или торосов (рис. 31.1). Предпо ложим, что на экране РЛС видна четкая отметка от льдины или тороса А 1. В момент выполнения надежной обсервации измеря ются пеленг и дистанция до этого хорошо различимого на экране РЛС объекта А 1 и этот ориентир наносится на карту по пеленгу и дистанции от обсервованного места М. Скорость судна во льдах при невозможности использования га может быть определена несколькими способами: • с помощью судовой РЛС; • по обсервациям; • способом " планшириого лага"; • глазомерной оценкой.
При определении скорости с помощью судовой РЛС на э не выбирается хорошо видимый ориентир (торос, стамуха), положенный по носу или корме. Через некоторый промеж времени последовательно производят измерения двух расс ний до наблюдаемого объекта и рассчитывают скорость судн формуле
V=!:!.D/Ы.
Разновидностью данного способа является определение ск сти судна по относительным определениям места судна. На эк РЛС выбирается хорошо различимый сигнал от ориентира
 420 Раздел 8. Методы навигации в особых условиях плавания 420 Раздел 8. Методы навигации в особых условиях плавания
Глава 31. Плавание в высоких широтах и во льдах
Рис. 3 1.2. К определению скорости судна во льдах по относительным определени ям места
льду и измеряются пеленг и расстояние до него (рис. 31.2). Через интервал времени 5-10 мин производится повторное измерение пеленга и расстояния до этого же ориентира. На карте или план шете относительно точки А по пеленгам и расстояниям наносятся точки KI и к2. По измеренному расстоянию меЖду полученными точками и промежутку времени плавания меЖду ними рассчитыва ется скорость судна. При подвижном ориентире А вычисленная скорость судна бу дет относительной и в нее не входят составляющие сноса от воз действия течения и ветра. Точность способа зависит от точности измерения радиолокаци онных пеленгов и расстояний. При определении скорости судна способом " планширною лага" измеряется промежуток времени, в течение которого судно прохо дит расстояние, равное его длине, мимо выброшенного на лед пред Рис. 31.3. К определению суммарного сноса судна с помощью ручного лота
мерный. При этом учитываются скорость изменения направл на льдину, сила ощущаемого ветрового потока, число обор движителей и характер льда. Скорость судна, определенная на при достаточном опыте и навыке, часто совпадает с ее дейс тельным значением. Совершая плавание в сплошном льду, судно, кроме отн тельного движения, вместе со льдом имеет переносное движе которое, как и течение, необходимо учитывать при счислении При невозможности определения места судна вдали от б гов с помощью РЛС, по РНС или астрономическими способ суммарный приближенный снос судна определяется с помо ручного лота на глубинах до 50 м. Для этого судно прижима к дрейфующей льдине подветренным бортом и стопорит (рис. 31.3). С наветренного борта выбрасывается лот и лотлинь вытра вается до грунта. Измеряется глубина Н и включается секундо мета или приметной льдины. По длине судна L в метрах и времени t При дрейфе судна лотлинь потравливается без ослабления его в секундах определяют скорость судна в узлах по формуле тяжения. Через 120-180 с секундомер останавливается и измер
V = 3600L = 1, 944 1852t t
Так как для данного судна значение длины остается постоянным, то можно заранее составить таблицу, из которой затем по аргументу времени в секундах можно будет выбирать скорость в узлах. При плавании в сплошном льду для определения скорости суд на могут быть применимы и другие способы, в том числе и глазо- ся вытравленная за борт длина лотлиня l. Скорость сноса в у определится из выражения
1, 94
др Н2 '
а направление сноса определится по направлению лотлиня
Глава 32. Требования к точности судовождения
организации (IMO) выработал стандарт точности судовожден принял его в Резолюции А.529(13) 17.11.83 г. Стандарт предна чен для выработки требований к точности судовождения, обе чения навигационной безопасности плавания с заданной вер ностью (Р6п = 0, 95), оценки эффективности работы систе С'ГаНДарт точности судовождеiШЯ средств навигационного оборудования (СНО) и техничес Международнойморской организации
Штурманская служба на судне организуется и возглавля ется капитаном судна и предназначена для обеспечения навигаци средств навигации (ТСН), а также оценки работы судоводител Факторами, влияющими на требования к точности судово ния, являются: скорость судна, расстояние до ближайшей нав ционной опасности, район плавания. онной безопасности плавания.
Плавание судна осуществляется в трех специфических, с то зрения наличия навигационных опасностей, районах: • открытого моря; • прибрежного плавания; • стесненного плавания.
В соответствии с требованиями стандарта точности при пл
где Dно - расстояние до навигационной опасности. Для обеспечения навигационной безопасности судна при пла вании от момента выхода до момента прихода должна постоянно вестись навигационная прокладка, которая включает в себя счис ление, определение места судна и расчеты маневров для расхожде ния с другими судами. нии в районах открытого моря со скоростью до 30 узлов погр ность счислимого (текущего) места с вероятностью Р = 0, 9 должна превышать 4% от дистанции до навигационной опасно
В стандарт IMO включена таблица, содержащая требован точности определения места М 0, допустимое время плавани Процесс измерения и обработки навигационных параметров сопровождается погрешностями, которыми будут отягощены и ко ординаты места судна. Поэтому для обеспечения навигационной безопасности плавания, обоснования маневра судна с целью рас хождения с навигационной опасностью необходимо производить оценку точности определения места судна. Оценка точности места судна должна производиться: счислению tд в зависимости от Dно при условии, что гирокомп лаг соответствуют требованиям IMO, счисление не корректир лось, погрешности имеют нормальное распределение, а течен дрейф учитываются с возможной точностью (табл. 32.1 ). Требования данного стандарта имеют ориентировочный ха тер, так как основаны на усредненных оценках точности счисле Рекомендации IMO позволяют реализовать единый подх • при выполнении предварительной прокладки; • при подходе к берегу, навигационной опасности, стесненным водам; • в случаях, когда невязка обсервованного места превышает до определению требований к точности плавания и способствуют вышению безопасности плавания судов. В районах прибрежного и стесненного плавания, где место на контролируется с помощью обсерваций по береговым орие пустимую величину.
Интервал между обсервациями в зависимости от навигацион ных условий плавания устанавливает капитан судна. Для предупреждения навигационных происшествий, связан ных с посадками на мель, подкомитет Международной морской рам и радионавигационным системам, требования к точности довождения зависят от конкретных обстоятельств плавания. Для обеспечения навигационной безопасности плавания н ходимо произвести следующие расчеты: • оценить вероятность безопасного плавания Р6п для конкрет условий плавания; 424 Раздел 8. Методы навигации в особых условиях плавания
Глава 32. Требования к точности судовождения
Табл. 4.18 может быть использована для расчетов Мд при зад ном Dmin по заданной вероятности безопасного плавания Р о, 25 о, 5 6 также для определения минимального допустимого расстояни
мую РСКП счислимого места Мд в зависимости от Р3ад;
навигационной опасности Dmin при известной РСКП счислим места судна М и заданной вероятности безопасного плавания Если навигационные опасности расположены по одному бо то вероятность безопасного плавания рассчитывается по форм
Р6п = 0, 5[1 + (Фz)],
где Фz - функция Лапласа, определяемая по аргументу D.fi z=- м' И в этом случае для расчетов можно использовать сбор МТ-2000, входя в табл. 4.19 по аргументам D и М.
32.2 Требования Международной ассоциации маячных служб
< Мд; При плавании в стесненных районах, в узкостях, по с • рассчитать tд для конкретных способов определения места судна; темам разделения движения (СРД), каналам, фарватерам требо
= tд - 2t c; ния к точности судовождения повышены и более детальны,
ных участков маршрута перехода.
Навигационная безопасность плавания Р6п оценивается веро ятностью прохода судна по чистой воде без соприкосновения с требования IMO. Международная ассоциация маячных служб (МАМС) рег ментирует расчет Р6п производить с помощью нормирован функции Лапласа, которая может быть выбрана из табл. МТ-2000. надводными и подводными препятствиями с известными коорди 1. В общем случае, когда линия заданного пути (ЛЗП) проло натами. на на расстояниях D1 и D 2 от границ полосы, по которой след
судно, вероятность безопасного плавания рассчитывается по ф
где D - кратчайшее расстояние до ближайшей навигационной опасности; М- РСКП счислимого места судна в точке кратчайше
z. =! 3_ ' 0, 7Мт
-нормированное расстояние до опасности, вы го расстояния до ближайшей навигационной опасности. женное в средних квадратических отклонениях; 426 Раздел 8. Методы навигации в особых условиях плавания
D; - расстояние до ближайшей границы полосы движения; О, 7Мт - средняя квадратическая погрешность места судна по направлению, перпендикулярному к линии пути. 2. В случае, когдаЛЗП проложена посредине полосы, т. е. D 1 = = D2 = 0, 5Н (Н- ширина полосы следования судна по системе раз деления движения, фарватеру, каналу) Глава 32. Требования к точности судовождения
к точности судовождения
Наша страна традиционно принимает активное участ разработке международных стандартов точности судовожден российские национальные нормы в этой области полностью с ветствуют международным. Отечественные нормативы точн
где Ф(zl) = Ф(z2) = Ф(z),
z= 0, 5Н =О? Н 0, 7Мт ' Мт '
Рбп = Ф(z).
Использование табл. 4.20 МТ-2000, может облегчить решение и более детальны и приведены в Инструкции по навигационн оборудованию (ИНО-89) (табл. 32.2).
Зона ПJiавания Допустимая Частота Допустимое средНЯя определений время обратной задачи, когда для обеспечения заданной вероятности бе зопасного плавания Р6п требуется рассчитать допустимую РСКП места судна Мд. Прокладка ЛЗП посредине узкости наиболее предпочтительна, так как в этом случае Р6п = max.
Зона стесненного плавания: квадратичная места судна измерения погрешность tд и обработки определения навигапионн места судна Мп параметров, 3. В соответствии с правилами 9 и 10 МППСС-72 при плавании судна в узкости, по СРД, на фарватерах, по каналам судоводитель - акватории портов, 5-20м Непрерывно лоцманским гаваней методом, с применением должен, насколько это возможно, держаться внешней границы
-узкие (шириной высокоточных РИС О, 15 ширины 1-5 мин 0, 5-1
Если при плавании посредине узкости Р 6 " = 1 или Р 6 " > Рзад• то следует рассчитать то минимальное расстояние Dmiп• на котором мо жет быть проложена ЛЗП относительно внешней границы узкости. При плавании вдоль одной навигационной опасности (одной границы прохода), когда расстояние до другой навигационной опасности D2 > 3Мт и Р2 = 1, вероятность безопасного плавания может быть рассчитана по формуле
рбп = 0, 5(Pl + 1),
где=Ф(Z 1 )=Ф(1, 4 ),
При решении подобной задачи работа упрошается, если вос пользоваться табл. 4.23 МТ-2000. 100-200 м) каналы канала, и фарватеры фарватера
Прибрежная зона: - фарватеры шириной 0, 2 ширины 1-5 мин 0, 5-1 2-20 кбт фарватера - системы разделения 0, 2ширины 10-30 мин 1-3 движения полосы одностороннего движения - рекомендованные пути 1-5 кбт 20-30мин 1-3 в расстоянии до 25 миль от берега - рекомендованные пути 2% от расстояния 1-2 ч 5-10 в расстоянии свыше до берега, но не 25 миль от берега более 2 миль
Зона открытого моря 2% от расстояния 2-4ч 10-15 до опасности, но не более 2милъ
Глава 33. Навигационная подготовка к рейсу судна
На основании рекомендаций МАМС, Российских наставлений Требования Международной Морской Организации к пла по штурманской службе на судах следует придерживаться точнос тей места судна и частоты обсерваций в зависимости от ширины полосы следования. При этом точность определения места и час тота обсерваций должны обеспечить Р 6 п не менее: 0, 997- в каналах с Н::; 100 м; 0, 993 - на фарватерах с Н::; 250 м; 0, 950- на фарватерах, в полосе с Н> 0, 2 мили. Перевод известньрадиальньсредних квадратических по грешностей места судна М в радиальные погрешностизаданной рованию рейса изложены в главе VIII, разделе A-VIII/2 Между родной Конвенции ПДМНВ-78/95. Согласно этим требован предстоящий рейс должен планироваться заранее, принима внимание всю имеющую к этому отношение информацию, а бой проложенный курс должен быть проверен до начала рейса До начала каждого рейса капитан судна должен обеспеч чтобы предполагаемый путь из порта отхода до первого порта з да планировался, используя соответствующие карты и другие вигационные пособия, необходимые для предстоящего рейса,
держащие точную, полную и откорректированную информаци
где kP- коэффициент, выбираемый из табл. 4.15 МТ-2000. отношении тех навигационньограничений и опасностей, кот рые имеют постоянный или предсказуемый характер, и кото имеют отношение к безопасности плавания судна. По завершении проверки запланированного пути, принима
Глава 33 НАВИГАЦИОННАЯ ПОДГОТОВКА К РЕЙСУ СУДНА внимание всюотносящуюсяк нему информацию, запланиров ный путь должен быть проложен на соответствующих карта быть постоянно доступен для вахтенного помощника капит который, до того как лечь на соответствующий курс, обязан проверить. Если в ходе рейса принято решение об изменении следующ порта захода или если необходимо существенно отклониться от 33.1 Международные требования, u регламентирующие подготовку к репсу
В соответствии с требованиями Уставов службы на судах морского и речного флотов РФ капитан судна организует вахтен ную и штурманскую службы, обеспечивает выполнение требова ний организационно-распорядительных документов и органов надзора за безопасностью плавания, систематически передает по мощникам свой опыт и знания, заботится о повышении их квали фикации, способствует внедрению на судне передовых методов су планированного пути по другим причинам, измененный путь д жен прорабатываться заранее, до того как он будет существе изменен.
33.2 Национальные wебования к вьmолнению предварительпои прокладки
После получения рейсового задания, изучения рай довождения. плавания и ознакомления со всеми особенностями предстоящ Получив рейсовое задание, капитан совместно со штурманским составом прорабатывает маршрут предстоящего плавания, опреде рейса капитан лично или по его указанию один из его помощни должен составить графический план рейса. ляет меры по обеспечению безопасности плавания в рейсе. Графический план рейса на морской участок пути выполняе При подготовке к рейсу для участков, требующих применения методов морской навигации, капитан выполняет предваритель ную прокладку или поручает ее одному из помощников с после на откорректированной генеральной карте (картах) полностью весь рейс. В качестве графического плана рейса для внутрен водных путей, как правило, используется схема ВВП. дующим контролем. При этом для плавания в сложных условиях он назначает конкретные методы и приемы судовождения, обес После утверждения графического плана рейса выполняе предварительная прокладка. печивающие безопасность плавания в этих условиях и обстоя Предварительная прокладка выполняется на откорректиров
ных путевых, частных картах и планах, на которых будет вест
Глава 33. Навигационная подготовка к рейсу судна
фактическая (исполнительная) прокладка в данном рейсе до выхо да судна в рейс не менее чем на двухсуточное плавание. Для даль нейшего плавания она выполняется поэтапно на переходе, но то же не менее чем на двое суток вперед. Корректура карт, руководств и пособий должна быть закончена до выхода судна в рейс. При кратковременной стоянке в порту и невозможности выполнить корректуру до выхода судна в рейс раз решается по усмотрению капитана проводить корректуру раздель но, по этапам перехода. В последнем случае до выхода судна из порта корректура должна быть выполнена в таком объеме, чтобы • расчет протяженности и продолжительности рейса; • подбор и корректура карт, руководств и пособий, получ данных о путевой, навигационной, ледовой, гИдрометеор гической и минной обстановках; • изучение и оценка района плавания; • составление графического плана рейса; • выполнение предварительной прокладки; • составление справочных материалов на рейс; • подготовка технических средств судовождения и связи. обеспечить плавание судна на первые трое суток. Оставшаяся кор ректура выполняется на переходе морем, но не менее чем на трое ходовых суток вперед. При сравнении требований ПДМНВ-78/95 и НШСМ-86 вИдно, Требования и рекомендации при выполнении штурман подготовки к рейсу изложены в главе 3 НШСМ-86, поэтому смотрим особенности некоторых из них. Расчет протяженности и продолжительности рейса. Расчет вы что международные требования к планированию рейса и выполне няется для целей рейсового планирования и определения нео нию предварительной прокладки гораздо жестче, чем националь ные, так как предполагают выполнение корректуры карт и посо бий и выполнение предварительной прокладки до выхода в рейс на димых запасов топлива, воды, провизии и других вИдов судо снабжения. Расстояния, необходимые для расчета протяженности р весь переход до первого порта захода. В соответствии с требованйями ИМО национальные требова ния могут отличаться от международных требований, но только в сторону их ужесточения. выбираются из Таблиц морских расстояний для судов смешан плавания (1992 г.). Приближенное ходовое время морской части рейса рассч вается по установленной протяженности рейса без учета про дения узкостей и каналов и по средней скорости судна. Затем
33.3 Проработка перехода бавляется время на прохождение узкостей, каналов, лоцманс проводку и швартовные операции. Расстояния, выбранные из таблиц, в дальнейшем уточняются Общие сведения. Основанием для планирования рейса составлении графического плана рейса. Допуск Sта6 - Sкарт < 5% служат: Подбор и корректура карт, руководств и пособий. Карты, руково • рейсовое задание (задание на рейс); ва и пособия на морской участок пути подбираются по откор • рейсовый план-график, который вьщается не позднее, чем за сутки до начала рейса; • указания капитана.
В целях обеспечения подготовки судна к предстоящему рейсу тираванным Каталогам карт и книг, в которых ведется учет с вой коллекции. При подборе карт необходимо учитывать требование о вед навигационной прокладки на картах самого крупного масшт зависимости от района плавания: экипажу заблаговременно сообщаются сведения о предстоящей работе. Эти сведения содержат задания по объему (наименование, • планы- на порты, бухты, рейды и якорные места (М= 1 1: 25000); род и количество) груза, портам отправления и назначения, дате подачи судна в порт погрузки. • частные карты - при плавании вблизи берегов, в шхерах и у стях (М= 1: 25000 1: 100000); Штурманская подготовка к рейсу в полном объеме осуществля ется перед первым выходом в рейс по данному маршруту, выпол • путевые карты - при плавании на значительном удалени берега (1: 100000 1: 1 000000);
чает в себя следующие мероприятия: • генеральные карты ·- для общего изучения района и соста ния графического плана рейса.
Источниками информации для корректуры карт и пособий яв ляются: • ИМ ГУНиО МО флотов и приложения к ним; • районные предупреждения НАВАРЕА по обширным районам Мирового океана, передаваемые на английском языке; • навигационные предупреждения НАВИП по прибрежным во дам иностранных государств и водам открытого моря, передава Глава 33. Навигационная подготовка к рейсу судна
Графический план рейса на морской участок пути выполня на откорректированной генеральной карте (картах) на весь полностью в системе судового или оперативного времени и п назначен для: • наглядного представления сведений о районе плавания, ма руте судна, условиях и особенностях перехода; емые на русском языке; • прибрежные предупреждения ПРИП и COASTAL WARNING на ограниченные прибрежные участки, передаваемые на рус ском и английском языках; • уточнения общей протяженности и продолжительности ре времени прохода отдельных его участков; • получения исходных данных для предварительной проклад • местные предупреждения об изменениях в акваториях портов, передаваемые на национальном языке.
Изучение и оценка района плавания. Изучение района плавания выполняется по подобранным и откорректированным картам и пособиям, рекомендациям служб безопасности судовождения, прогнозам погоды. Цель изучения - оценка условий плавания, обеспеченность картами, руководствами и пособиями и выявление факторов, вли яющих на выбор маршрута перехода и на обеспечение навигаци онной безопасности плавания. Оформление графического плана рейса. На свободном месте ка помещается заголовок, в котором указывается: • NQ рейса; • порты выхода и назначения; • даты выхода и прибытия; • время, по которому составлен план (NQ часового пояса).
В нижней части карты ставится дата и подпись капитана. Затем производится " подъем" карты, т. е. вьщеление на к сведений, имеющих важное значение для обеспечения навиг онной безопасности плавания: Изучение района плавания предусматривает: • уяснение общей навигационно-географической характеристи • на участках маршрута, расположенных в непосредствен близости от навигационных опасностей, вьщеляется цвет ки маршрута; • определение участков пути, проходимых: открытым морем; карандашом опасная изобата, соответствующая минималь безопасной глубине, и обводятся окружностями отдельно л щие навигационные опасности; вблизи берегов; в стесненных районах; по внутренним водным путям; • наносятся или вьщеляются запретные, опасные и сложные плавания районы, места интенсивного движения судов и рамные переправы; • оценку возможностей определения места судна. • отмечаются границы территориальных вод и других зон с у новленным режимом плавания в них; Затем для относительно самостоятельных участков пути подроб • наносятся (вьщеляются) порты и места возможного укры но изучаются и в тезисной форме записываются основные сведения: • навигационно-географические; • гидрометеорологические; • правовые и информационные вопросы; • описания портов отхода, промежуточных и прихода; судна в случае ухудшения гидрометеорологической обстано • отражаются другие сведения по усмотрению капитана.
Затем на карте наносятся: • все генеральные курсы судна;
• над линией каждого пути надписывают направление и скоро
Глава 33. Навигационная подготовка к рейсу судна
• под линией пути подписывается длина каждой линии пути и в скобках (нарастающим итого! \I) общая длина пути от начальной точки (порта) плавания; • у точек поворота указывается судовое или оперативное время; • для участков рейса, где отдельные курсы из-за мелкого масшта ба проложить затруднительно, показываются время входа и вы хода, а также суммарное проЙденное расстояние; • отмечаются точки: рекомендованным путям и по возможности в светлое врем ток; • расстояние между линией пути и навигационными опасн ми должны превышать предельную погрешность места с рассчитанную для ожидаемых условий плавания.
При выборе курсов для плавания в стесненных районах подходах к портам должны быть учтены все требования мес начала суток и указывается дата; - перевода часов; - восхода и захода Солнца; правил, лоций и особенностей плавания по системам раздел движения. Выполнение предварительной прокладки. Предварительная • намечаются точки и моменты донесений о своем месте, измене нии видов и адресатов связи; кладка выполняется на всех путевых, частных картах и плана которых будет вестись исполнительная прокладка в данном р • приводятся сведения о наиболее важных гидрометеорологичес наиболее удобного для данного района масштаба. При этом н ких условиях плавания для различных участков пути на свобод ном участке карты.
На отдельные участки маршрута перехода рассчитываются: • допустимая точность счислимого места судна; ходимо использовать информацию карт и планов наиболее к ного масштаба, которая может содержать важные навигацио данные. Предварительная прокладка в общем должна соответств графическому плану рейса. • ожидаемая точность обсерваций доступными способами; В процессе разработки предварительной прокладки прои • необходимая периодичность обсерваций.
Выбор курсов судна. При выборе курсов судна необходимо стро го руководствоваться: • ограничениями, установленными Регистром; • рекомендациями для плавания судов данного класса; дится уточнение и конкретизация расчетов, выполненных при работке графического плана перехода. Особое внимание обращается на детализацию прокладки ных курсов. Кратчайшее расстояние между линией пути, проло ной на карте, и ближайшей навигационной опасностью до обеспечить безопасность плавания с заданной вероятностью. • руководящими документами Департаментов морского (речно го) флота Минтранса РФ и указаниями служб безопасности су довождения; При выполнении предварительной прокладки необходимо • выполнить " подъем" карты; • выполнить прокладку частных курсов, надписать вдоль ка • указаниями для плавания, приведеиными в лоциях, на морских навигационных картах, в Правилах и Руководствах для плава линии пути их направления и составить в виде таблицы " П чень курсов предварительной прокладки"; ния.
В общем случае при выборе курсов руководствуются следующи ми положениями: • курсы следует прокладыватЪ на таком расстоянии от берега, ко торое позволяет надежно определять место судна с заданной точностью и требуемой частотой; • не следует без крайней необходимости прокладыватЪ курсы че рез территориальные воды иностранных государств, если толь • наметить точки начала и конца поворотов, провести и на сать линии поворотных пеленгов и дистанций; • измерить расстояния по каждому курсу и рассчитать время вания с учетом предполагаемой скорости; • у точек поворота надписать время; • отметить точки открытия и скрытия наиболее важных мая других СНО; • провести на карте ограждающие линии положения относи но ближайших навигационных опасностей;
• проход через узкости должен осуществляться по фарватерам и • рассчитать элементы приливных уровней для стесненных р нов и портов с приливными явлениями;
Глава 33. Навигационная подготовка к рейсу судна
• рассчитать элементы приливных течений для прибрежных рай онов; • обосновать расчетами и выбрать способы определения места судна на основные участки плавания.
По результатам проработки маршрута составляются следующие таблицы: • список карт и пособий; • перечень номеров извещений мореплавателям; • перечень выполненной корректуры; • сведения о портах и местах укрытия; Наставления и рекомендации для плавания составляются н новании обобщения анализа и выводов, сделанных в ходе пр ботки маршрута перехода. В тексте Наставления должны быть отражены: • способы и дискретность определения места судна на ка курсе и оценка их точности; • навигационные опасности по пути перехода судна и мер обеспечению заданного уровня навигационной безопасн плавания; • способы обеспечения поворота судна на новый курс в зада точке; • перечень курсов предварительной прокладки; • сведения о маяках; • сведения о радиомаяках и радиолокационных маяках-ответ- • необходимые меры безопасности по подготовке судна к пл нию в стесненных условиях и в условиях ограниченной в мости; чиках; • сведения о РНС; • астрономические явления; • меры безопасности, предусмотренные местными правил плавания и другими нормативными документами; • требования по ведению наблюдения и организации связи; • таблица приливов в основных пунктах маршрута; • таблица элементов течения; • оценка точности места и оценка обеспечения безопасности плавания. • действия при получении неблагоприятного прогноза пог или при внезапном ухудшении погоды; • места приема, смены и высадки лоцмана; • личный опыт капитана и его помощников.
Приведенный перечень таблиц носит рекомендательный харак тер и не является обязательным. Составление справочных материалов на рейс. Справочные материа лы на рейс (штурманская справка) составляются по результатам изучения района плавания, выполнения предварительных расче тов и предварительной прокладки, а также с учетом полученных на судно прогнозов, извещений и распоряжений.
33.4 Анализ навиrациоmюй прокладки
Невязки являются обобщенной информацией, хара ризующей точность ведения навигационной прокладки. Прич появления невязок - погрешности или промахи (грубые оши в счислении и погрешности обсерваций. При надежных обсе Количество и объем справочных материалов определяется службой безопасности судовождения, капитаном, а также задача ми и условиями плавания. Часть из них может быть представлена на картах в виде таблиц, схем и условных обозначений, ссьшок на циях анализ невязок способствует выявлению характера погр ностей счисления. Счисление ведется правильно, если учитываются верные менты счисления. В этом случае счислимые места должны со страницы руководств и пособий для плавания. Объем штурманской справки может быть следующим: • графический план рейса; дать с обсервованными. Все невязки - следствие погрешнос предыдущей (исходной) и данной обсерваций. Примем гипотезу, суть которой в том, что счисление вед
• справочные таблицы; • наставления и рекомендации для плавания. правильно и невязки обусловлены только случайными погреш стями обсерваций. Предположим при этом, что средние квадр ческие погрешности обсерваций достоверны. Нормированная вязка Сн в этом случае определяется отношением
Глава 33. Навигационная подготовка к рейсу судна
с = ci
0, _, 0,
1 1-1 1 тические погрешности предьщуmей и данной обсерваций. Нормированная невязка распределяется по круговому закону Не меньшее значение для выявления промахов в счислении ет знание достоверной величины коэффициента точности счи ния. Поэтому анализ надежности счисления производится плексно, совместно с анализом отдельных элементов счислени Для выявления источников невязок, направленных пример одну сторону, может быть применен логический анализ: • если с изменением курса судна направление невязок не изм ется, то причина их - неправильный учет течения; Релея. Ее критические значения, численно равные kP, выб рают • если с изменением курса судна курсовой угол невязок оста из табл. 4.15 МТ-2000 по заданной вероятности безопасного плава прежним, то причинаих-или погрешности системы курса ния Р. Для Р= 0, 95 kP = 1, 73. Анализ невязок производят сравнением их нормированных значений с критическими:
чайности невязки не отвергается. Можно считать, что невязка про изошла за счет неточиости обсерваций, а счисление ведется на дежно, все элементы счисления учитываются правильно, и их по зания (при траверзнам направлении невязок), или погреш ти приборов, вырабатывающих пройденное расстояние направлении невязок по линии курса).
33.5 Типичные промахи штурманов при решении НавиrациоШIЫХ задач
Опытные судоводители утверждают, что нет аварийн грешности не проявляются на фоне погрешностей обсерваций.
где Mc(t)- радиальная средняя квадратическая погрешность счис ления на интервале между предпоследней и данной обсервациями, то делается вывод о том, что невязка обусловлена не только слу чайными погрешностями обсерваций, но и случайными погреш ностями счисления. В этом случае счислимое и обсервованное ме ста осредняются с учетом их весов. Несмотря на отсутствие грубых ошибок в счислении, принимаютел меры к уточнению элементов счисления. Прежде всего выявляется наличие неучтенной систе матической составляющей сноса; оправданной и неизбежной. Аварии и условия для их возникн ния создают люди своей неорганизованностью и безграмотнос а иногда и безответственным отношением к своим обязанно по обеспечению безаварийного плавания судна. Наиболее часто приводили к авариям следующие действи доводителей: • определение места по недостаточно надежно опознанным ентирам; • определение места судна по двум линиям положения, чт позволяет обнаружить ошибки и промахи в наблюдениях; • принятие для дальнейшего счисления пути судна из нескол обсерваций той, которая оказалась ближе к счислимому м без дополнительной проверкидругими способами;
в) если С; > О, 7kр Мн +М; +М и , элементов его движения, без контрольной проверки этих ра тов для исключения возможных ошибок и промахов;
Следует иметь в виду, что выводы статистического анализа име ют вероятностный характер. Их достоверность зависит от точнос ти знания средних квадратических погрешностей обсервации. • ведение счисления пути судна по приборам, поправки кото длительное время не определялись; • принятие решения на выполнение маневра судна курсом скоростью без предварительной проверки их безопасност навигационной карте; • плавание на глаз в районах со сложными навигационно-ги графическими условиями без тщательного ведения счислен
• нарушение установленного (объявленного) режима плавания в специальных районах, расположенных вблизи маршрута пере хода судна; • непринятие надлежащих мер предосторожности при проходе вблизи навигационных опасностей; • отсутствие контроля за глубиной под килем судна, особенно вбли зи берегов, мелей, в малоизученных в навигационном отношении районах, в зонах повышенной вулканической деятельности; • неучет сведений, передаваемых по радио об изменении навига ционной обстановки в районе плавания судна; • невыполнение правил и рекомендаций МППСС-72 или допу щениенеоправданного риска при выполнении маневра расхож дения со встречными судами, особенно в тумане или при пони женной видимости; • неучет прогнозируемой и фактической погоды штормового ха рактера и др. Глав а 34. Перспективы развития средст в и методо в навигации
Глава 34 ПЕРСПЕКТИВЫ РАЗВИТИЯ СРЕДСТВ И МЕТОДОВ НАВИГАЦИИ
34.1 Основные направления развития и совершенствования средств навигации
Перспектины развития средств и методов навигации ределяются исходя из: • требований к точности выработки навигационных парамет при решении задач судовождения;
• национальных планов развития технических средств нави ции; • резолюций ИМО по конвенционному оборудованию судов.
С 1 июля 2002 г. вступила в действие резолюция MSC 99(73) 05.12.2000 г., определяющая состав обязательного навигационно оборудования судов различного водоизмещения и назначен Перечисленные упущения, безрасчетные действия и неоправ Среди оборудования, впервые требуемое к установке как обяз данный риск при управлении судном - главные причины аварий и тельное или соответствующее новым стандартом, следует вьщ аварийных происшествий навигационного характера. лить: ЭКНИС и РЭКНС; приемник ГНСС или наземных РН Из ошибок, обусловленных психофизиологическими фактора (" Лuоран-С" ' " Декка " ) с учетом района плавания; радиолокацио ми, наиболее распространены: ныи отражатель, позволяющий обнаружить его РЛС диапазона 3 • отсчет направлений по пеленгатору и транспортиру в обратном 1О м; система для приема звуковых сигналов; средство электро направлении (выполняется стереотипный отсчет: слева - на право); • ошибки в долготе на 30 или 1о при нанесении места на карту по координатам и в знаке долготы при вычислениях; нои радиолокационной прокладки (СЭП-ЕРА); устройство для п редачи информациuи о курсе; средство автосопровождения ради локационных целеи (САС-АТА); судовой транспоидер АИС; сре ство автоматического управления по курсу или траектории и др. • ошибки чтения расстояний, измеренных с помощью РЛС, за счет неучета диапазона шкал и их оцифровки (километры, ка Являясь базовым данное оборудование может быть дополнен новыми системами и средствами, по мере развития науки и техник бельтовы, мили); Анализ задач судовождения и требований к навигационном • ошибки в определении поправок секундомеров, равные 1 мин или 30 с; обеспечению их решения показал, что в обозримой перспектин они не будут подвержены существенным изменениям. Исключ
Для профилактики появления подобных промахов в работе штурмана необходимо исключить спешку и нервозность. На ходо ние представляет специальная группа задач по поиску и добыч полезных ископаемых на шельфе, которые не относятся к навиг ционным. В табл. 34.1 приведены современные требования к точност вом мостике и в штурманской рубке ограничивается пребывание опре еления места судна. Удовлетворение столь жестких требо лиц, не связанных с несением вахты, и запрещаются посторонние вании представляется возможным за счет использования средне разговоры. На рабочем столе штурмана не должно быть ничего орбитных спутниковых навигационных систем и их функцио лишнего, мешающего работе. нальных дополнений - дифференциальных подсистем. Осталь
ные системы радионавигации по своим возможностям на поря Глава 34. Перспектины развития средств и методов навигации
РНС " Декка" (2000 г.) и др.
Таблица 34.1. Требования к точности координат места судна дионавигации будут определять спутниковые навигационные с темы, которые продолжают интенсивно развиваться и соверш ствоваться, предоставляя все новые и новые услуги потребител космосе, воздухе, на воде и земле. В обозримой перспектине (2008-2010 гг.) в мире будет н диться в эксплуатации три спутниковые навигационные систе GPS, ГЛОНАСС и " Галилео", а также дифференциальные доп нения к ним. Рассмотрим перспективы развития каждой из ни
сти спутниковых технологий и национальные интересы, в С принят в 1996 г. долгосрочный план модернизации системы G которая обусловлена:
• необходимостью обеспечения для граЖданских потребите
Все суда и буксиры Маломерные суда 2-5 5-10 99, 9 99, 9 1-2 5-10 более высокой точности, надежности и целостности навига онного сигнала. Код С/А на частоте L1 не полностью удо
Речные суда дriЯ производства работ 0, 1-5 99, 5 1-2 творяет перспективные требования гражданских потребите к навигационному обеспечению;
и буксиры 6-10 • необходимостью повышения для военных потребителей по хозащищенности сигнала, а также предотвращения испол
Маломерные суда 8-20 99, 9 В зависимости от местных условий вания GPS противником.
Модернизация предполагает: Суда дriЯ поиска и добычи 1-5 99, 0 полезных ископаемых 1) введение дополнительных общедоступных кодирован Суда мя производства 0, 1-5 99, 0 1-2 сигналов. Второй гражданский сигнал будет транслироваться
работ Рыболовные суда
частоте 1227, 6 МГц, известной как частота L2. В настоящее вр эта частота модулируется только с помощью Р(У) кода, исполь Прибрежная зона мого военными потребителями. Третий граЖданский сигнал L5
99, 7 120 дет передаваться на частоте 1176, 45 МГц в диапазоне служб ав Маломерные суда 460-3700 99, 0 Рыболовные суда 460 99, 0 Суда мя поиска и добычи 1, 0-100 99, 0 полезных ископаемых 300 60 1 ционной радионавигации (ARNS - Aeronautica1 Radionaviga services). Расположение сигнала в диапазоне ARNS необход для использования всех доступных сигналов при обеспечении Научно-исследователь- ские суда 460 99, 7 60
зопасности полетов авиации. Сигнал на частоте L5 бьш разрабо с целью улучшения характеристики существующего С/А-код частоте L1. Мощность сигнала L5 будет больше на 6 дБ, чем у Все суда 3700-7400 нала Ll. Составляющая нового сигнала, в которой отсутствуют Большие суда максималь- 185-460 ной эффективности вигационные данные, позволит обеспечить наиболее устойчи
Суда дriЯ поиска и добычи полезных ископаемых Научно-исследователь- ские суда 10-100
185-460 слежение за фазой. Полоса пропускания передающего канала ставляет минимум 20 МГц и при высокой скорости передачи волит достичь более высокой точности даже при наличии шу многолучевости. Предполагается, что использование кода, бо длинного, чем С/А-коды на частотах L1 и L2, уменьшит внут 444 Разде л 8. Методы навигации в особых условиях плавания
ние помехи системы, обусловленные внутренней взаимной корре ляцией; 2) проведение мероприятий, направленных на предотвращение
юзники сохраняли военное преимущества без нарушения работы Глава 34. Перспектины развития средств и методов навигации
B1ock 111) и соответствующей наземной сети управления для Модернизация сводится к вводу новых военных кодов (М-код), пользования ее после 2010 г. Цель программы GPS B1ock 111- которые будут применять тот же спектр радиосигнала, который ис пользуется сигналами, передаваемыми на частотах L1 и L2. Новый военный сигнал будет иметь криптазащиту и изменения в форма те навигационных данных. НКА следующего поколения будут пе биться создания такой архитектуры GPS, которая будет удо творять существующие и перспективные требования военн гражданских потребителей. Модернизация наземного контура управления направлена редавать при необходимости М-кодированные сигналы в требуе мом регионе с мощностью на 20 дБ больше, чем У существующего сегодня Р(У)-кода. Следует заметить, что для гражданских потребителей первый реальный шаг по модернизации GPS бьш сделан 1 мая 2000 г. с от мены режима селективного доступа. • обеспечение возможности отслеживания всех сигналов, п даваемых орбитальной группировкой G PS; • техническую модернизацию существующих станций мон ринга системы GPS; • замену компьютеров главной станции управления на сеть с пределенной архитектурой; В результате модернизации существенно повысится точность навигационных определений. В табл. 34.2 приведены данные, ха рактеризующие новые возможности модернизированной GPS. Программа модернизации сигналов GPS неразрывно связана с модернизацией орбитальной группировки КА и наземного конту ра управления системы. Модернизация орбитальной группировки должна быть вьшолне- надо 2010 г. (когда будут запущены все 12 спутников серии Вlock IIF). • интеграцию с сетью спутникового контроля ВВС США и о печение полной совместимости со спутниками серии Block • ввод в действие дублирующей станции оперативного конт (АМCS - Alternate Master Contro1 Station) на авиабазе Ван берг (Vandenberg); • обеспечение функций управления и контроля для спутн серии B1ock IIF.
Модернизация GPS позволит:
Таблица 34.2. Точиоствые характеристики модернизированной GPS • улучшить точность местоопределения в стандартном режим 100 до 8 м (95%); • обеспечить разрешениенеоднозначности при выполнении сокоточных фазовых измерений; • уменьшить влияние любых случайных помех на систему и а ратуру потребителей.
Все это создаст возможности для появления новых вариа применения G PS. Dюбальная навигационная спуrниковая система (ГЛОНАСС). В
из восьми спутников, из них только семь используются по цел му назначению. К недостаткам существующей системы ГЛОН следует отнести: • малый срок активного существования ее НКА (гаранти время активного существования- 36 мес.);
446 Раздел 8. Методы навигации в особых условиях плавания
• неполный состав орбитальной группировки (7 НКА), что при Глава 34. Перспектины развития средств и методов навигации
водит к перерывам в обсервациях до 2, 5-4 ч; • невозможность определения потребителями поправки системы курсоуказания; • отсутствие необходимого количества аппаратуры потребителей ГЛОНАСС; • недостаточная помехоустойчивость системы, в том числе и ап- паратурыпотребителей.
С целью восстановления состава системы ГЛОНАСС и ее раз вития в России принята и реализуется обширная программа по мо дернизации космического и наземного сегментов системы. Основные положения этой программы сводятся к следующему: • система будет находиться под государственным контролем и управлением и обеспечивать интересы гражданских и военных потребителей, в том числе и зарубежных; Показатель
Зона обслуживания Количество обслуживаемых потребителей Точность навигационных определений: по координатам, м по скорости, см/с Оперативность, мин Целостность (время оповещения об отказе) Доступность Значение показателя Д)1Я ГЛОНАСС ГЛОНАСС-М Глобально Не ограничено
20-30 10-15 3-5 1-2 0, 5-4 0, 5-4 0, 5-12 ч До! Ос
0, 99 0, 99 • система будет совместимой (на уровне аппаратуры пользовате лей) с другими спутниковыми навигационными системами (GPS, " Галилео" ), нонезависимой от них; • в системе будет реализован режим, исключающий несанкцио нированное использование высокоточных навигационных ка тенсивного их использования гражданскими потребителями. Т не менее, указанные системы остаются и будут оставаться подво ным управлением, что означает отсутствие гарантий для гражд ских пользователей в постоянном доступе к системам, в частно в периоды международных кризисов. Кроме того, по мере накоп налов; • в системе будет реализован комплекс мероприятий, обеспечи вающих ее защищенность от несанкционированного внедрения в управление, искусственных и преднамеренных помех, атак террористов; • восстановление орбитальной группировки до штатного состава будет обеспечено в сроки, сопоставимые со сроками разверты вания систем GPS IIF и " Галилео"; • система будет удовлетворять перспектинным требованиям по требителей и обладать характеристиками (табл. 34.3), которые, по крайней мере, не уступят характеристикам проектируемых систем GPS Вlock IIF и " Галилео"; • в системе будет обеспечен переход навигационного сигнала в новый частотный диапазон (литеры от минус 7 до плюс 6) с по ния гражданскими пользователями опыта работы с системами G и ГЛОНАСС выявились серьезные их ограничения, а именно: 1) недостаточная точность решения навигационных задач обеспечения: • управления воздушным движением в районе аэропорта, при ходе на посадку и посадке; • управления и навигации морского (речного) транспорта в га нях, узкостях, проливах, реках; • управления железнодорожным и автомобильным транспорт 2) недостаточная целостность из-за неспособиости систем б тро обнаружить свое неправильное функционирование и опе тивно оповещать об этом пользователей; 3) невозможность использования GPS и ГЛОНАСС в стаща ном режиме для управления движением подвижных объектов, давлением внеполосных помех.
Развитие ГЛОНАСС непосредственно связано с развитием спутниковой навигации за рубежом. редачи координатно-временной информации, сигналов бедств опознавания и др.
В этой связи в Европе проводят работы по созданию ГНСС
батывались главным образом для военного применения, однако в последнее время наметилась тещенция все более широкого и ин- вого поколения, базирующихся на современных технологиях с зи и навигации, а также на имеющемся промытленном потенц ле. Европейская ГНСС получила название " Галилео".
В Европейском союзе: • считают, что многие проблемы его суверенитета и безопасности будут под угрозой, если критическая в этом плане GPS останет ся вне его контроля и управления; • опасаются, что союз может оказаться под угрозой чрезмерных требований по оплате услуг со стороны монопольной амери ния местоположения он мог использовать любую комбин НКА всех трех систем. ЗапускиНКА планируются с 2004 г., ло передачи навигационного сигнала- с 2005 г., начало экспл ции в полном объеме - с 2008 г. Спутниковую группировку планируется развернуть полно к 2007 г. В случае привлечения партнеров, не входящих в Евр канской G PS и вынужден будет полностью принять диктат ский союз, ее численность может быть доведена до 30 аппар США; • учитывают, что рынок НАП ГНСС только в Европе уже в 1997 г. составил 230 млн долларов и ожидается его рост к 2004 г. до 960 включая 27 рабочих и 3 резервных. Среднеорбитную группир могут дополнять несколько геостационарных НКА. Наземны мент будет включать примерно 14 станций, связанных спец млн долларов, а выгоды за период 2005- 2023 гг. могут соста вить около 85 млрд долларов, в то время как возможность Евро ной сетью связи для мониторинга положения НКА и точнос бортовых часов и вычисления поправок. пы конкурировать на этом прибьшьном рынке может быть се Параллельно с ГНСС " Галилео" в Европе разрабатывается рьезно ограничена, если не будет равного доступа к технологи ческим достижениям непосредственно в ГНСС; гой проект - EGNOS (European Geostationary Navigation Ov Service -Европейская дополнительная геостационарная нави • считают, что спутниковая навигация будет играть все более онная служба). Его суть состоит в передаче с геостационар фундаментальную роль в будущем, заменяя обширную назем спутника данных дифференциальной коррекции и другой до ную инфраструктуру других средств и давая сушественную эко номию.
Предполагается, что ГНСС " Галилео" должна быть: • независимой от GPS, но взаимодействующей с нею; • управляемой под международным контролем; • более точной и доступной, быстро обнаруживать и оповещать о неисправности элементов системы; • рентабельной; нительной информации для пользователей сушествующих спу ковых навигационных систем. В 2000 и 2001 г. с помощью ап туры EG N OS на спутниках Inmarsat 3 уже бьmи проведены т показавшие возможность определения положения движуш объекта с погрешностью до 1 м. Система EGNOS будет завер в 2003 г. и войдет в строй в начале 2004 г. В ней будет задейст но три спутника. В последующем (до 2015 г.) ее предполагаетс тегрировать в систему " Галилео". Появление среднеорбитных спутниковых навигационных • открытой для участия других партнеров, в частности, России, тем, дифференциальных методов определения места по ним, э что выгодно Европе.
В систему должны войти по крайней мере 21 спутник на орби тах наклонением 55-60° и высотой 23000-24000 км, соответствую щая наземная инфраструктура и региональные и местные расши рения. Аппараты будут передавать три типа навигационных сигна лов: бесплатный общедоступный, платный сигнал повышенной точности (фактически- дополнительный поток данных, модули рующий основной сигнал) и высокоточный сигнал, применяемый тронных карт и прецизионных средств курсоуказания откр принципиально новые возможности в судовождении. Ниже новимся на рассмотрении некоторых из них.
34.2 Комплексное использование спутниковых и rеоинформацишmых технолоrий
Современный этап развития навигационно-гидрогр в государственных службах безопасности и управления системами ческого обеспечения судовождения характеризуется значит транспорта. Заявленная погрешность определения положения в режиме общего доступа - 4 м, с использованием высокоточного сигнала - 0, 45 м, время оповещения пользователя об отказе НКА ным увеличением потоков разнородной информации, необх мой для принятия оптимальных управленческих решений, в числе и в экстремальных ситуациях.
аппаратуре пользователя с GPS и ГЛОНАСС, чтобы для определе- Для охвата всего объема информации она должна быть п ставлена в удобном и обозримом виде, позволяющем из всего
Глава 34. Перспективы развития средств и методов навигации
жества данных выбирать только важные и необходимые. Кроме то го, обоснованность управленческих решений во многом зависит от Кроме того, ГИС должна обеспечить решение следующих ч ных задач: применеимя для этих целей математических методов оптимиза ции, реализованных в виде машинных методик, что в целом дает возможность автоматизировать этот процесс и существенно повы сить производительность труда. Решение указанных проблем становится уже невозможным без привлечения автоматизированных информационно-управляю щих систем с использованием геоинформационных технологий. Одним из основных средств геоинформатики являются географи ческие информационные системы (ГИС), под которыми понима ется совокупность компьютерного оборудования, программнаго обеспечения, географических данных и произвольнаго проекти рования пользователем хода работ для накопления, хранения, ви доизменения, обработки, анализа и визуализации всех форм ин формации. Основой любой ГИС является цифровая карта. ГИС позволя ет создавать карты в разных масштабах и проекциях с разнооб • создание и ведение баз пространственно-распределенных д ных; • создание и редактирование цифровых карт в различных пр циях и масштабах; • отображение различных данных в виде карт, графиков, грамм и т. п.; • анализ картированных данных; • измерение геометрических характеристик природных объек расстояний от географических точек до районов с теми иными условиями и т. д.; • изменение масштабов отображения, форм и вида предста ния графической и картированной информации; • привязку информации из баз данных к географическим об там на цифровых картах; • интерполяцию и построение векторных и скалярных поле информации из баз данных; разной окраской, определять пространствеиные связи между объектами карты. При этом ГИС позволяет создать любую нуж ную географическую картину, удовлетворяющую требованиям потребителя. Таким образом, главное назначение ГИС- опера • выполнение запросов на многообразные выборки из баз данн на отображение и пространственный анализ картированных ных (по параметрам, периодам времени, районам и т. д.); • документирование информационной продукции; тивное представление пользователю достоверной и обработан ной пространственно-распределенной информации, необходи мой для решения управленческих задач, что делает ее незамени мым аналитическим инструментом в повседневных и экстре мальных условиях. Успешность функционирования ГИС во многом обусловлена соблюдением следующих основных требований, предъявляемых к • применение приложений для выполнения специальных ви обработки, хранения информации и др.
Одной из сложнейших проблем в ГИС-технологии явля оперативный сбор и хранение исходных данных, съемка кото представляет собой трудоемкий и дорогостоящий процесс. В стоящее время наибольшее распространение в качестве осн ним. ГИС должна быть: для создания цифровых карт получили традиционные морс • полной, т. е. охватывать все стороны информационного, про граммнаго и технологического обеспечения, которые встреча ются в процессе эксплуатации системы; навигационные карты. Однако при их отсутствии или при не ходимости получить оперативную информацию большого пр ранствеиного охвата представляется целесообразным испол • комплексной, т. е. иметь возможность совместного анализа боль вать дистанционные средства. Особая роль здесь отводится сп ших групп параметров в их взаимосвязи; никовой информации в ГИС, где результаты дистанционн • открытой, т. е. обеспечивать легкость модификации и перена лаживания с целью поддержания ее на уровне современности, что необходимо как для обеспечения эволюционности, так и зондирования поверхности Земли (океана) из космоса являю регулярно обновляемыми источниками данных, необходи для формирования информационных слоев электронных ка для решения разнообразных задач; широком спектре масштабов (от 1: 10000 до 1: 10000000). При э • защищенной, т. е. обеспечивать защиту информации, предназ наченной для различных уровней управления. информация от дистанционных средств зондирования позвол не только оперативно оценивать, но главным образом, прои
452 Раздел 8. Методы навигации в особых условиях плавания Глава 34. Перспектины развития средств и методов навигации
спутники с дистанционными средствами зондирования, работ щими в оптическом диапазоне. Для оперативности передачи с
\ Космические аппараты: навигационный; \ освещения обстановки; океанографический;
Потребители которые предусматривают применение векторного квантова изображений или непосредственное преобразование изображе в цифровой вид на борту космического аппарата для дальней передачи их потребителю. метеорологический; Интегрирование спутниковой информации и ГИС-техноло топогеодезический открывает принципиально новые возможности в создании авто
Основные блоки: 1) картографический; 2) навигационный; 3) общесудовой;
Вспомогательные блоки: 6) справочный; 7) архивный; тизированных информационно-управляющих систем. Новая тех логия имеет следующие достоинства, которые выводЯт ее в лиде • комплексность информации; • оперативность ее получения и представления в компакт виде; • наглядность представления; 4) океанографический; 5) моделирования; 8) сервисный • анализ совокупной разнородной информации и вырабо обоснованных управленческих решений; • мобильность системы.
Устройство отображения выходной информации Рассмотрим возможность использования новой технологи автоматизированных информационно-управляющих системах судах (АУИС-С). Система предназначена для автоматизированной подгото обоснованньуправленческих решений при повседневной де тельности судов.
Рис. 34.1. Схема информационного взаимодействия морского подвижного объек та со спуrниками и пользователями различного уровня
слоев. Также отметим, что в ГИС важны не только слои инфор Структура АИУС-С должна соответствовать штатной инфор цианно-управляющей структуре судна. При этомАИУС-С строится на базе лакально-вычислитель сети (ЛВС), которая обеспечивает информационную поддер для принятия управленческих решений в рамках компетенции мации, но и точная привязка объектов на них к географической личных звеньев командования судна, включая вахтенного на м системе координат. С учетом изложенного, для формирования графических слоев тике. В такой системе должны быть предусмотрены алгорит ввода-вывода, фильтрации, анализа и корректуры данных, а та может быть полезной комплексная информация от следующих возможность наращивания числа рубрик, удаления ненужны спутниковых систем: навигационных (ГЛОНАСС, GPS, ГЛО НАСС + GPS); освещения обстановки; океанографической; мете орологической; топагеодезической и др. переименования имеющихся. Доступ к информации осуществ ется по технологии " Клиент-сервер". Основной элемент любой АИУС-С - автоматизированное При этом для осуществления связи между морским подвижным бочее место (АРМ) специалиста. Типовое АРМ состоит из пер объектом и пользователями различного уровня предусматривается нального компьютера с источником бесперебойного питан
ров (рис. 34.1). программнога обеспечения с базами данных и использует те щую информацию датчиков.
Глава 34. Перспектины развития средств и методов навигации
ля (в нашем случае - вахтенного помощника капитана) является
разработка интерфейса. Среди существуюших наиболее удобен для непрофессиональных (с точки зрения специалистов в области • вести исполнительную прокладку и производить навигац ные расчеты; компьютерных технологий) пользователей интерфейс типа иерар хического меню, который предоставляет схему обработки инфор мации по принципу " смотри и выбирай". Это значительно упро • формировать " мозаику" из различных информационных с или их фрагментов. Блок океанографических данных предназначен для сбора, х щает взаимодействие пользователя с компьютером, поскольку ис пользование меню не требует изучения языка общения с системой. ния и анализа данных о внешней среде в интересах обеспеч безопасности плавания. Блок включает гидрографические с Принцип построения интерфейса целесообразно осуществлять в соответствии с функциональными обязанностями штурмана. ния, океанографические данные, метеорологические данные. Блок позволяет: Система должна оперировать с восемью группами данных, струк • подготавливать исходные данные для машинных методик б турно объединенных в основные блоки (картографический, нави гационный, океанографический, тактический, моделирования) и вспомогательные (справочный, архивный, сервисный). Картографический блок предназначен для выработки электронных карт различных масштабов и проекций, являющихся ядром ГИС. Содержит следующие рубрики (разделы): электронные карты; спе циальные карты; справочные карты; вспомогательные карты. моделирования по оценке воздействия внешней среды на фективность выполнения рейса; • прогнозировать состояние внешней среды и учесть ее вли на безопасность плавания; • использовать информацию для предварительной оценки можности применения радионавигационных средств и раз ных полей Земли в интересах навигации; Блок позволяет: • осуществлять выбор нужной карты, автоматическую ее загрузку и перемещение карты на экран; • управлять масштабом и нагрузкой карты (базовой, стандарт • вьщавать океанографическую информацию другим польз телям.
Общесудовой блок предназначен для: ной, полной); • осуществлять просмотр карты на любой географический район • учета состояния судна (наличия и состояния механизмов, гр топлива, запасов пресной воды и др.); с увеличением (уменьшением) изображения в целом или от дельной области; • планирования общесудовых мероприятий и работ и проведе общесудовых и других расчетов; • выбрать объект на карте и вьщать по нему справку; • выбрать нужные информационные слои (локальные места) и составить из них мозаику; • учета требований руководящих документов по действиям су в различных ситуациях и др. • произвести смену экранной палитры.
Навигационный блок предназначен для ведения навигационных прокладки и журнала (документирования обстоятельств плава ния). Включает следующие рубрики: средства навигационного Блок моделирования предназначен для оперативного приня обоснованных управленческих решений за счет автоматиза процесса и применения математических моделей, основанны аппарате исследований операций, математической статистике арии игр, имитационного моделирования и др. оборудования; навигационные расчеты; предварительная про кладка; исполнительная прокладка; автоматическое документиро вание текущих навигационных параметров и обстоятельств плава Важным достоинством блока является то, что он позволяет п изводить оценки действий судна в динамике, а также в реаль времени или с использованием временного масштаба. Кроме т ния; выработка сигналов предупреждений. Блок позволяет: блок позволяет моделировать различные экстремальные и повс невные ситуации для выработки управленческих решений. • обосновать выбор и отобразить основной и резервный маршру Блок справочной информации предназначен для поддержки фу
ционирования основных блоков информацией долгосрочного х "
Раздел 8. Методы навигации в особых условиях плавания 456
огательное значение. Содержит следу- нения, которая имеет вспом вания· наставления и правила;
тинной работы по ручному оформлению карт, составлению пояс нительных записок, ведению документов и переписки.
. ельные пособия , правовы е вопросы; при- Созданные предпосьmки позволяют перейти к разработке каче справочные и вычислит ' казы и директивы. v и и использовать в различных Блок позволяет оперативно наит
целях нужную Р я архивации информационных Архивный блок пред азначен свою актуальность. Блок поз- ресурсов и их описании, поте:: Лть доступ к сохраненной инфор воляет вести архив и предост или осуществления выборки данных. мации для ее восстановления алы которые не входят в состав В блоке могут содержаться матери ,
 информационных ресурсов судоводителя. для предоставления су Блок " Сервисные функции" предназначен ектронной почты и ав информационных ресурсов судоводителя. для предоставления су Блок " Сервисные функции" предназначен ектронной почты и ав
ственно новых технических средств навигации и способов их ис пользования.
34.3 Ишеrрированные навиrацио Ш iые системы
В настоящее время в мировой практике судовождения все большее распространение получают интегрированные нанига ционные системы, основанные на комплексном использовании разнородных данных. Это связано со стремлением получения мак симальной эффективности от имеющихся средств навигации пу
е живает администрировани е сис- тем автоматизации их управлением, оптимизации процессов ком томатического секретаря. Подд р ам входящим в состав плексной обработки навигационной информации, сокращения
в АИУС-С Блок обеспечивае
т подклю- числа обслуживающего персонала. Внедрение ГНСС второго по информационных ресурса . м общего пользования коления (GPS + ГЛОНАСС) открьmо новые возможности в этой
их пользователей
, позволяет выпал- области. Наиболее перспектинным направлением считается инте или открытым ресурсам друг ф ионных ресурсов и их от нить выборку собственных ин ормац правку по электронной почте. убрики содержащие необходимые В блоке предусмотрены р а'явок на ремонт и получение грация инерциальных и спутниковых данных. На судах устанавливаются так называемые бесплатформенные инерциальные навигационные системы (ИНС), специфика кото рых состоит в том, что блок чувствительных элементов (акселеро
зипа а также для их учета метры и гироскопические датчики, измеряющие кажущиеся уско со складов технических србедстн, :;; ает но росы делопроизвод и списания. Отдельная РУ рика в
ства. жемесячного недельного и суточного пла- Для осуществления е 'овой СУБ предусматривается нирования деятельности н рамках суд которая позволяет отсле- рения и угловые скорости) жестко связан с корпусом, а все необхо димые преобразования осуществляются посредством вычислите ля. Отсутствие гиростабилизированной платформы, на которой размещаются чувствительные элементы, приводит к существенно
использование специальной программы, жинать технические и организационные м ераприятия и вести до- ее стоимости, что обусловило большое их распространение. Достоинства и недостатки ИНС и ГНСС приведеныв табл. 34.4.
кументооборот в электронно: : представляется, что оснаще- Учитывая вышеизложенн ' ностью получения раз-
Совместное использование данных ИНС и ГНСС в интегриро ванных системах позволяет сохранить достоинства и снизить недо статки каждой из них. ИНС в этом случае служит в качестве интер
ин одновременны м использованием полятора, корректируемого по данным ГНСС при наличии сигна вигационных и других систем с ффективности действий лов от НКА и вырабатывающего навигационные параметры при их
е безопасной эксплу- отсутствии. При наличии сигналов от спутников продолжитель носителя позволит осуществлять yn знения окружающей cpe- ность времени интерполяции совпадает с интервалом поступления
и предотвращение загря б азом. По предварительны
навигационной информации от ГНСС, а при пропадании- совпа ды самым эффективным о р ителя может вырасти на по- производительность работ: : шается обоснованность при рядок и более. Прэто: адает необходимость в выполнении ру нятых им решении и о дает со временем их отсутствия. Так как эти интервалы времени незначительны (единицы минут), то в интегрированной системе могут быть использованы менее точные и, следовательно, менее 458 Разде л 8. Методы навигации в особых условиях плавания
Глава 34. Перспектины развития средств и методов навигации
Первые попытки интеграции бьши предприняты на боевых раблях по принципу размещения на одном пульте дистанцион управления и сигнализации различных систем (навигации, св общекорабельных и т. д.). Однотипные технические средства равлялись посредством их коммутации. Такой подход имел существенный недостаток-низкую моде зационную способность. При замене даже одного централизов управляемого технического средства на однотипное новое, треб лась значительная доработка всего интегрированного пульта. С середины 70-х годов начались работы по созданию инте рованных пультов управления на базе вычислительной техн основные особенности которых заключались в следующем: • обмен информацией (сигналами управления и данными) м дорогие чувствительные элементы. При наличии сигналов от НКА легко решается проблема выставки ИНС и происходит непрерыв пультом и техническими средствами осуществлялся по един интерфейсу; ная калибровка чувствительного элемента, в том числе и в период маневрирования судна. Кроме того, используя внешнюю инфор • управление каждым техническим средством осуществляло одного рабочего места; мацию о параметрах движения судна в НАП удается снизить поло • при подключении к пульту новых технических средств вза су ее пропускания, что снижает шумы приемника и повышает точ ность спутниковых измерений. Наличие этой же информации су щественно сокращает время, необходимое для восстановления приема спутниковых сигналов после их пропадания. Использова ние данных от ИНС облегчает решение проблемы целостности, а также решение задачи исключения неоднозначности и восстанов ления потерянного числа периодов при работе с фазовым каналом.
34.4 ИнтеrрироваiПiая система ходового мостика старых аналогичного предназначения доработке подлеж только программное обеспечение.
Реализация всех достижений в этой области бьша осуществ в начале 80-х годов в морской системе автоматизации проце судовождения " Бирюза". В ней обеспечивалось решение ос ных задач навигации и управления движением судна, вкл счисление и прокладку пути; определение географических и шрутных координат по данным радионавигационных систем диолокационных и астрономических измерений; определение ментов движения целей; оценку опасности сближения судов и Идея интеграции систем управления, контроля, радио технического и навигационного оборудования судов появилась в середине 60-х годов прошлого века. Ее появление бьшо обусловле но возникшими противоречиями: с одной стороны - поступлени ем в эксплуатацию большого числа новых технических средств су довождения, с другой - наметившейся тенденцией по сокраще: нию обслуживающего их персонала на фоне возросших скоростеи работку рекомендаций по безопасному расхождению; регис цию навигационной информации. В системе также обеспечив режим автоматизированных расчетов планирования и конт грузовых операций, расчет прочностных и иных характери судна для различных вариантов плавания. В 90-е годы окончательно оформилась концепция изготовл всего комплекса связного, навигационного оборудования и те
ческих средств управления судном от одного поставщика в еди дизайнерском исполнении. Производители электронных ка систем автоматической радиолокационной прокладки к э 460 Раздел 8. Методы навигации в особых условиях плавания
• для ведения радиосвязи по УКВ (органы дистанционно равления и переговорные устройства); • для внешней звуковой и световой сигнализации (органы р Необходимость интеграции технических средств в целях повы шения безопасности судовождения юридически оформлена в ряде регламентирующих документов: • новой редакции главы V Конвенции СОЛАС-74/88; • циркулярном письме Комитета по безопасности на море ИМО го управления свистками, программные устройства авто ческой подачи звуковых и световых сигналов, органы д ционного управления электромегафонами, ключи Проб вых ламп и лампы дневной сигнализации, коммутатор нально-отличительных фонарей и др.); MSC/Circ. 982 " Руководство по эргономическим критериям оборудования мостика и его расположению"; • требования сертификационных обществ, например, " German Lloyd" и " Det Norske Veritas" к оборудованию мостика на судах под классификацию " Один человек на мостике"; • Правилах по оборудованию морских судов Российского мор ского Регистра судоходства (Общие требования к ходовому • для внутренней связи и звуковой сигнализации (теле парной связи, коммутаторы служебной телефонной свя лефоны судовой АТС, коммутаторы командной громк рящей связи и трансляции, замыкатели авральной сигн ции и др.); • для обеспечения живучести судна и для других ответств операций (закрытие водонепроницаемых и противопож мостику судов, управляемых одним человеком); • Кодекс к безопасности высокоскоростных судов. дверей, пуск систем пожаротушения, управление якорны ройством, вентиляцией жилых и служебных помещений мов, подруливающим устройством, активным рулем и т. Таким образом, к 2002 г. в мировом морском сообществе сло • для звуковой и световой сигнализации о неисправностях жилась полная готовность перехода к интегрированным моетико вым системам на судах гражданской постройки. Создание интегрированной моетиковой системы позволяет не полнительной сигнализации о выполнении заданных к (обобщенная и индивидуальная сигнализация о неиспр тях ответственных механизмов, систем и устройств, сигн только успешно реализовать функции, которые ранее выполня ция о достижении предельно допустимых значений отде лись с помощью набора отдельных технических средств, но и обес печить более оперативное и оптимальное решение " пограничных" параметров, например, температуры, давления, частоты в ния, глубин и т. п.); задач на стыке нескольких, ранее разделенных (а часто и разнесен ных по расположению) систем. К органам управления, контроля и приборам индикации инте грированной моетиковой системы относятся органы и приборы, предназначенные: • для автоматизированного и автоматического управлени ном и для решения задач по расхождению и предупреж столкновений судов.
Интегрированная навигационная система должна объе • для изменения хода судна (органы дистанционного управления отдельные навигационные приборы и устройства для непрер rлавными двигателями, тахометры гребного винта, указатели положения лопастей и др.); го контроля за навигационной обстановкой и обеспечения ветствующих сигнализаций. • для передачи и регистрации команд об изменении хода судна электромеханическими средствами (машинные телеграфы, ре версографы и др.); • для наблюдения за окружающей обстановкой в районе плава ния (индикаторы РЛС, указатели глубин, гидролокаторы, ин дикаторы длины вытравленной якорной цепи и др.); • для индикации величин, относящихся к элементам движения судна (указатели курса, скорости, пройденного расстояния, по ложения пера руля, скорости поворота, осадки и др.); Интегрированные навигационные системы, в зависимо объема выполняемых функций, подразделяются на три кат (А, Б, В): А - системы, обеспечивающие обработку и отображен формации о курсе, скорости и координатах судна, а также щем времени; Б - системы, обеспечивающие автоматическую обраб отображение информации о курсе, скорости, текущих коо тах судна, а также о глубине с формированием предупредит
го сигнала об известных по запланированному маршруту и обнару женных опасностях; В - системы, обеспечивающие, в дополнение к функциям кате гории Б, автоматическое управление судном по курсу, траектории или скорости, и осуществляющие контроль за параметрами управ ления. Управление интегрированной навигационной системой долж но осуществляться с единого пульта управления, включающего в себя органы управления системой, средства отображения инфор мации и сигнализации. Список литератур ы
1. Баранов Ю.К., Гаврюк М.И., Логиновекий В.А., Песков Навигация. Учебник для вузов - 3-е издание, переработаи дополненное.- СПб.: Издательство " Лань", 1997.-512 с. 2. Землянавекий ДК. Лоция внутренних водных путей. У пособие для вузов.- М.: Транспорт, 1982.-216 с. 3. Наставление по штурманской службе на судах Минреч РСФСР(НШС-86). -Л.: Транспорт.Ленинrр. отд-ние, 1987. - 4. Правила плавания по внутренним водным путям.-М.: сульт, 2003. - 80 с. 5. Практическое кораблевоЖдение 1 Под ред. А.П.Мих ского. Кн. 1. Л.: ГУНиО МО, 1988.-896 с. 6. Рекомендации по организации штурманской службы на (РШС-89).- СПб.: ЗАО ЦНИИМФ, 1999.- 152 с. 7. Удачин В.С., Шереметьев Ю.Н. Навигационные знаки и судовая сигнализация: Справ. пособие. -М.: Транспорт, 1 255 с. 8. Мореходные таблицы (МТ-2000). NQ 9011.- СПб.: Г МО РФ, 2002. - 576 с. Оглавление _ '
J
3.2. Принципы измерения скорости и пройденного судно расстояния ..................................... 3.3. Определение пройденного судном расстояния по относительному лагу............................. Раздел 2. КАРТОГРАФИЯ .................................
Глава 4. Основы теории картографических проекций .......... 4.1. Картографическая проекция...................... 1 4.2. Масштаб .......................................
Раздел 1. ОСНОВНЫЕ ПОНЯТИЯ НАВИГАЦИИ .....................5
Глава 1. Ориентирование наблюдателя на земной поверхности ......5 4.3. Характеристика искажений проекции.............. 4.4. Классификация картографических проекций ....... Глава 5. Нормальная равноугольная проекция Меркатора ...... 5.1. Общие формулы цилиндрических проекций ........ 1.1. Форма Земли и ее модели ...........................5 5.2. Принцип построения меркаторской проекции ...... 1.2. Основные точки, линии и плоскости на поверхности Земли .................................9 5.3. Уравнения проекции и их анализ .................. 5.4. Изменение масштаба. Полоса широт практически 1.3. Основныелинии и плоскости наблюдателя ...........10 постоянного масштаба ........................... 1.4. Географические координаты. Разность широт, 5.5. Единица карты.................................. разность долгот ...................................11 5.6. Меридиональные части .......................... 1.5. Сечения земного эллипсоида. Длина одной минуты 5.7. Меркаторекая миля.............................. меридиана и параллели .............................14 1.6. Преобразование координат .........................17 5.8. Главная параллель карты ......................... 5.9. Расчет и построение картографической сетки 1.7. Ортодромия ......................................18 1.8. Локсодромия .....................................21 1.9. Ортодромическая поправка .........................24 меркаторской проекции..........................
Глава 6. Равноугольная поперечная цилиндрическая
Глава 2. Определение направлений в море.....................25 2.1. Системы деления горизонта ........................25 проекция Thycca ................................ 6.1. Сферические и плоские прямоугольные координаты 6.2. Принцип построения картографической сетки. 2.2. Истинные направления ............................28 2.3. Принципы измерения направлений .................30 Уравнения проекции............................ 6.3. Определение направлений и расстояний на карте в 2.4. Компасные направления. Поправка компаса ..........31 2.5. Способы определения поправки компаса .............33 проекции Гаусса ................................ 2.6. Земной магнетизм. Магнитные направления..........35 Глава 7. Перспективные азимутальные проекции ............. 2.7. Компасные направления по магнитному компасу .....38 7.1. Общая теория перспектинных проекций............ 7.2. Решение основных задач на картах в гномонической Глава 3. Определение расстояния, пройденного судном ..........42 проекции.......................................
7.3. Плавание по дуге большого круга..................
Раздел 3. ОСНОВЫ МОРСКОЙ И РЕЧНОЙЛОЦИИ ...............103
Глава 8. Навиrационное оборудование морей .................103 Оглавление ------------------------------------------------
13.3. Оперативная навигационная и гидрометеорологичес информация................................... 8.1. Навигационные опасности ........................103 8.2. Принципы навигационного оборудования...........104 8.3. Характеристики и классификация средств навигационного оборудования.....................106 8.4. Зрительные средства навигационного оборудования..107 8.5. Звукосигнальные системы .........................122 8.6. Дальность видимости предметов в море .............125
Глава 9. Морскиекарты..................................132 9.1. Требования к морским картам .....................132 Глава 14. Корректура морских навиrационных карт и пособий .. 14.1. Основные принципы корректуры навигационных ка и пособий ..................................... 14.2. Организация корректуры карт на судах ........... 14.3. Корректура карт на судах ....................... 14.4. Корректура руководств и пособий на судах........ 14.5. Обязанности штурманского состава судов по сбору и передаче навигационной информации .......... 9.2. Общая характеристика морских изданий ............135 9.3. Содержание морской навигационной карты .........136 9.4. Классификация морских карт ......................141 9.5. Система адмиралтейских номеров морских карт ......152 9.6. Степень доверия к морской навигационной карте ....155 9.7. Классификация руководств и пособий для плавания..157 9.8. Система адмиралтейских номеров руководств Раздел 4. СЧИСЛЕНИЕ ПУТИ СУДНА........................ Глава 15. Jрафическое счисление пути судна ............... 15.1. Назначение, сущность и разновидности счисления. 15.2. Ручное графическое счисление .................. 15.3. Графическое счисление с учетом дрейфа .......... 15.4. Графическое счисление с учетом течения ......... 15.5. Совместный учет дрейфа и течения .............. и пособий для плавания...........................163
Глава 1О. Основные понятия о лоции внутренних водных путей...164 15.6. Графическое счисление с учетом суммарного течения 15.7. Точность счисления пути судна ..................
Глава 11. Навигационное оборудование внутренних водных путей.167 11.1. Назначение и виды навигационного Глава 16. Аналитическое счисление пути судна............... 16.1. Аналитический способ расчета счислимых координат 16.2. Учет дрейфа и течения при аналитическом оборудования....................................167 11.2. Береговые навигационные знаки обозначения счислении ..................................... 16.3. Аналитический расчет направления и длины положения судового хода..........................168 11.3. Береговые информационные знаки .................172 11.4. Плавучие навигационные знаки ....................174 локсодромии...................................
Раздел 5. ВИЗУАЛЬНЫЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ МЕСТА Глава 12. Навиrационные пособия внутренних водных путей.....176 12.1. Карты и атласы ..................................176 СУДНА В МОРЕ .................................. 12.2. Руководства и справочные пособия для плавания.....178 Глава 17. Основные понятия и определения ................. 17.1. Основные понятия, связанные с определением Глава 13. Навигационная информация ......................179 13.1. Необходимость получения в море печатной места судна .................................... 17.2. Сущность определения места судна по навигационны и оперативной информации .......................179 13.2. Навигационная информация, распространяемая в виде параметрам..................................... 17.3. Влияние и учет несдновременности измерения
навигационных параметров ......................
17.4. Оценка точности обсерваций по двум навигационным изолиниям (линиям положения) ...................252 17.5. Последовательность действий при обсервации .......256
Глава 18. Определение места судна по пеленrам и rоризонтальным уrлам..........................257 18.1. Определение места судна по пеленгам двух навигационных ориентиров .......................258 18.2. Определение места судна по пеленгам трех навигационных ориентиров .......................261 18.3. Определение места судна по двум горизонтальным углам ...........................................266
Глава 20. Определение места судна по разновременным линиям положения ....................................281 20.1. Определение места судна по крюйс-пеленгу .........284 20.2. Определение места судна по крюйс-расстоянию......287 20.3. Расчет кратчайшего расстояния до ориентира по двум разновременным пеленгам на него .................288
21.1. Определение места судна по пеленгу и вертикальному углу .............................290 21.2. Определение места судна по пеленгу и горизонтальному углу............................291 21.3. Определение места судна по горизонтальному и вертикальному углам............................294 21.4. Определение места судна по створу и измеренным навигационным параметрам.......................295
Раздел 6. ИСПОЛЬЗОВАНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ В НАВИГАЦИИ...................................300
Глава 22. Определение места судна с помощью круrовых радиомаяков и разностио-дальномерных радионавиrационных систем .....................300 22.1. Классификация радионавигационных систем ........300 22.2. Принципы радиопеленгования. Радиокурсовой угол. Истинный радиопеленг ...........................302 Оглавление
и " Чаи..к.а.. ......................................
Глава 23. Использование судовых радиолокационных станций . 23.1. Назначение и принцип действия судовых навигационных РЛС............................ 23.2. Способы определения места судна с помощью РЛС. 23.3. Определение места судна с использованием радиолокационных маяков-ответчиков и отражателей .................................. 23.4. Средство автоматической радиолокационной прокладки..................................... 23.5. Особенности использования РЛС при плавании по внутренним водным путям ....................
Глава 24. Определение места судна с использованием rлобальных навиrационных спутниковых систем .............. 24.1. Структура глобальных навигационных спутниковых систем ........................................ 24.2. Методы определения места судна с помощью навигационных спутников ....................... 24.3. Среднеорбитные навигационные спутниковые системы GPS и ГЛОНАСС ...................... 24.4. Дифференциальная подсистема ГНСС ............ 24.5. Точность определения места по среднеорбитной ГНСС .......................
Раздел 7. ЭЛЕКТРОННАЯ КАРТОГРАФИЯ ...................
Глава 25. Электронные навиrационные карты и картоrрафические системы .................... 25.1. Международные стандарты и формат электронных картографических систем ....................... 25.2. Основные определения и сокращения............. 25.3. Картографическая информация, используемая вЭКНИС..................................... 25.4. Структураданных в ЭКНИС и используемая информация...................................
Глава 26. Функции электронных картоrрафических систем .... 26.1. Отображение ЭК на экранедисплея ЭКНИС ......
26.2. Предварительная и исполнительная прокладки.......374 26.3. Сигнализация и индикация в электронных картографических системах........................377 Оглавление
32.3. Российские национальные требования к точности 26.4. Корректура электронных навигационных карт .......378 26.5. Некоторые рекомендации по практическому судовождения................................... использованию ЭКНИС ..........................382 Глава 33. Навигационная подготовка к рейсу судна ........... 33.1. Международные требования, регламентирующие Глава 27. Международные и национальные требования к ЭКНИС 384 подготовку к рейсу .............................. 33.2. Национальные требования к выполнению предварительной прокладки ...................... Раздел 8. МЕТОДЫ НАВИГАЦИИ В ОСОБЫХ УСЛОВИЯХ 33.3. Проработка перехода ............................ ПЛАВАНИЯ .....................................388 33.4. Анализ навигационной прокладки................. 33.5. Типичные промахи штурманов при решении Глава 28. Плавание в стесненных водах .....................388 28.1. Характеристика стесненных вод....................388 навигационных задач ............................ 28.2. Подготовка к плаванию в узкостях..................389 Глава 34. Перспективы развития средств и методов навигации .. 28.3. Использование сеток изолиний и ограждающих линий 34.1. Основные направления развития и совершенствовани положения ......................................393 28.4. Навигационные особенности плаваниявузкостях....398 средств навигации............................... 34.2. Комплексное использование спутниковых и геоинформационных технологий .................. Глава 29. Плавание в районах регулирования движения судов ....400 34.3. Интегрированные навигационные системы .........
29.2. Плавание в системах разделения движения судов .....402 34.4. Интегрированная система ходового мостика ........ 29.3. Плавание в районах регулирования движения судов ..406
Глава 30. Плавание в условиях ограниченной видимости ........410
30.2. Подход к берегу в условиях ограниченной видимости .......................................412 30.3. Выбор морских путей с учетом
Глава 31. Плавание в высоких широтах и во льдах.............413 31.1. Навигационные условия плавания в высоких широтах.........................................413 31.2. Навигационные особенности плавания во льдах......416 31.3. Счисление во льдах...............................417
Глава 32. Требование к точности судовождения ...............422 32.1. Стандарт точности судовождения Международной морской организации.............................422 Список литературы ....................................
Учебное издание
НАВИГАЦИЯ И ЛОЦИЯ
Редактор А.С.Яновский Художник А.С. Скороход Дизайнер обложки О.Ю. Ильина Дизайнер Г.Л. Лозинов Компьютерный дизайн и верстка Г.Л. Лозинов
ИД Ng 04284 от 15.03.2001. Подписано в печать 05.07.2004. Формат 60х90/16. Гарнитура NewtonC. Печать офсетная. Печ. л. 29.5 + цв. вкл. Тираж 2000 экз. Тип. зак. 11п
Международная академическая издательская компания < < НаукаjИнтерпериодика» Издательско-книrоторrовый центр < < Академкнига> > 117997, Москва, Профсоюзная ул., 90 По вопросам поставок обращаться в отдел реализации И КЦ «Академкнига» Тел.jфакс: (095) 334-73-18 e-mai/: bookrea/@maik.ru, web-site: http: 11www.maik.ru
Отпечатано в 000 < < Внешторгиздат-полиграф•> 127576, Москва, ул. Илимская, 7 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-05-04; Просмотров: 401; Нарушение авторского права страницы
 можно бьшо подойти до наступления темного времени суток.
можно бьшо подойти до наступления темного времени суток. 394 Раздел 8. Методы навигации в особых условиях плавания
394 Раздел 8. Методы навигации в особых условиях плавания Рис. 28.2. Азимугальная сетка
Рис. 28.2. Азимугальная сетка 
 аз и т. д. с разностью между ними, равной постоянной величине, у
аз и т. д. с разностью между ними, равной постоянной величине, у
 а)
а)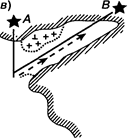



 чета и измерений. Поэтому между судоводителями должны быть
чета и измерений. Поэтому между судоводителями должны быть
 400 Раздел 8. Методы навигации в особых условиях плавания
400 Раздел 8. Методы навигации в особых условиях плавания
 серваций, положении судна относительно линии пути, направле нии и скорости сноса, пеленге и дистанции на точку очередного по ворота вахтенный штурман докладьтает капитану.
серваций, положении судна относительно линии пути, направле нии и скорости сноса, пеленге и дистанции на точку очередного по ворота вахтенный штурман докладьтает капитану.

 402 Раздел 8. Методы навигации в особых условиях плавания
402 Раздел 8. Методы навигации в особых условиях плавания
 Глава 29. Плавание в районах регулирования движения судов
Глава 29. Плавание в районах регулирования движения судов


 ния или не выходит из нее, не должно, в общем случае, входить в
ния или не выходит из нее, не должно, в общем случае, входить в Глава 29. Плавание в районах регулирования движения судов
Глава 29. Плавание в районах регулирования движения судов Контроль и регулирование движения судов необходимы для со
Контроль и регулирование движения судов необходимы для со 408 Раздел 8. Методы навигации в особых условиях плавания
408 Раздел 8. Методы навигации в особых условиях плавания ку с якоря, движение по контролируемой акватории, а также на
ку с якоря, движение по контролируемой акватории, а также на Глава 30. Плавание в условиях ограниченной видимости
Глава 30. Плавание в условиях ограниченной видимости тельств плавания;
тельств плавания; 
 412 Раздел 8. Методы навигации в особых условиях плавания
412 Раздел 8. Методы навигации в особых условиях плавания метеорологические условия, которые в соответствии с учетом мо-
метеорологические условия, которые в соответствии с учетом мо-

 шения во избежание сжатия во льду. Сплоченные торошенные
шения во избежание сжатия во льду. Сплоченные торошенные / 1 ' 1 \
/ 1 ' 1 \
 Наиболее простым способом ведения прокладки является ис пользование систем автоматического счисления, в которые перио дические изменения курса и скорости вводятся вручную.
Наиболее простым способом ведения прокладки является ис пользование систем автоматического счисления, в которые перио дические изменения курса и скорости вводятся вручную.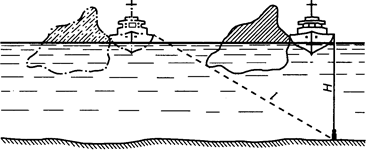






 • выбрать способы определения места судна, удовлетворяющие
• выбрать способы определения места судна, удовлетворяющие

 32.3 Российские национальные требования
32.3 Российские национальные требования Таблица 32.2. Огечественные нормативы точности судовождения
Таблица 32.2. Огечественные нормативы точности судовождения прохода с правого борта.
прохода с правого борта. 428 Раздел 8. Методы навигации в особых условиях плавания
428 Раздел 8. Методы навигации в особых условиях плавания
 тельствах.
тельствах. 430 Раздел 8. Методы навигации в особых условиях плавания
430 Раздел 8. Методы навигации в особых условиях плавания няется заблаговременно, с получением рейсового задания, и вклю
няется заблаговременно, с получением рейсового задания, и вклю 432 Раздел 8. Методы навигации в особых условиях плавания
432 Раздел 8. Методы навигации в особых условиях плавания
 Составление графического плана рейса. На основании результ изучения района плавания сос·rавляется графический план р (лично капитаном или под его руководством одним из помощ ков).
Составление графического плана рейса. На основании результ изучения района плавания сос·rавляется графический план р (лично капитаном или под его руководством одним из помощ ков).
 ко там не проходят международные морские пути;
ко там не проходят международные морские пути; 

 • справки о навигационно-гидрографических и других условиях и особенностях плавания для относительно самостоятельных участков рейса;
• справки о навигационно-гидрографических и других условиях и особенностях плавания для относительно самостоятельных участков рейса; 
 а) если Сн < kP или ( < 0, 7kP M ; -' +М; , то гипотеза ослу
а) если Сн < kP или ( < 0, 7kP M ; -' +М; , то гипотеза ослу
 • выполнение расчетов, связанных с определением места суд
• выполнение расчетов, связанных с определением места суд то гипотеза о случайности невязки не подтверждается. В счисле нии содержится грубая ошибка или систематическая погрешность. Объединение счислимого и обсервованного места недопустимо. Принимаютел срочные меры к уточнению элементов счисления.
то гипотеза о случайности невязки не подтверждается. В счисле нии содержится грубая ошибка или систематическая погрешность. Объединение счислимого и обсервованного места недопустимо. Принимаютел срочные меры к уточнению элементов счисления. производства обсерваций с дискретностью, обеспечивающей безопасное плавание;
производства обсерваций с дискретностью, обеспечивающей безопасное плавание; 



 гражданских потребителей GPS.
гражданских потребителей GPS.
 Таблица 34.3. Эксплуатационные характеристики среднеорбитных rнсс
Таблица 34.3. Эксплуатационные характеристики среднеорбитных rнсс 448 Раздел 8. Методы навигации в особых условиях плавания
448 Раздел 8. Методы навигации в особых условиях плавания - 6 с. Предполагается сделать систему " Галилео" совместимой по
- 6 с. Предполагается сделать систему " Галилео" совместимой по 450 Раздел 8. Методы навигации в особых условиях плавания
450 Раздел 8. Методы навигации в особых условиях плавания

 никовой информации предлагаются качественно новые подхо
никовой информации предлагаются качественно новые подхо использование космических аппаратов - спутников-ретранслято
использование космических аппаратов - спутников-ретранслято 454 Раздел 8. Методы навигации в особых условиях плавания
454 Раздел 8. Методы навигации в особых условиях плавания Одной из проблем при создании АРМ конкретного пользовате
Одной из проблем при создании АРМ конкретного пользовате ографической, океанографической, справочной и др. инфо ции;
ографической, океанографической, справочной и др. инфо ции;  Глава 34. Перспектины развития средств и методов навигации 457
Глава 34. Перспектины развития средств и методов навигации 457
 му упрощению конструкции навигационной системы и снижению
му упрощению конструкции навигационной системы и снижению правильного решения стало возможным за счет внедрения про сов автоматизации судовождения и интеграции множества пул управления техническими средствами в единый пульт.
правильного решения стало возможным за счет внедрения про сов автоматизации судовождения и интеграции множества пул управления техническими средствами в единый пульт. Глава 34. Перспективы развития средств и методов навигации
Глава 34. Перспективы развития средств и методов навигации Оглавление
Оглавление 466 Оглавление
466 Оглавление
 22.3. Определение места судна по РИС " Лоран-С"
22.3. Определение места судна по РИС " Лоран-С"  32.2. Требование Международной ассоциации маячных служб ..........................................
32.2. Требование Международной ассоциации маячных служб .......................................... 29.1. Транспортный поток судов ........................400
29.1. Транспортный поток судов ........................400