|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПРЕДУПРЕЖДЕНИЕ СТОЛКНОВЕНИЙ СУДОВСтр 1 из 10Следующая ⇒
ПРЕДУПРЕЖДЕНИЕ СТОЛКНОВЕНИЙ СУДОВ Глава 12. МЕЖДУНАРОДНЫЕ ПРАВИЛА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ СУДОВ В МОРЕ (МППСС-72)
§ 12.1 Структура МППСС-72
Конвенция о Международных правилах предупреждения столкновений судов в море была подписана 20 октября 1972 г. МППСС–72 вошли в силу и получили статус международного закона, определяющего правовые отношения между ее участниками, в 1977 г. после ратификации странами, имеющими 65% тоннажа мирового флота, считая суда валовой вместимостью от 100 рег. т и более. МППСС-72 являются основным документом, регламентирующим действия судоводителей при расхождении. В дальнейшем, с учетом накопленного опыта применения МППСС–72, ИМО был откорректирован текст Правил. В табл. 12.1 приведены данные о принятых ИМО поправках к МППСС-72. Т а б л и ц а 12.1
Любая поправка к Правилам по ее вступлении в силу заменяет предыдущее положение, к которому она относится, для всех участников Конвенции, которые не возражали против ее принятия (ст. VI, п. 5 Конвенции о МППСС–72). В 1982 г. ИМО разработала и ввела в действие «Руководство по единому применению некоторых правил МППСС–72» (принято на 46-й сессии Комитета по безопасности на море, КБМ/Циркуляр 320) Согласно Конвенции, подписанной всеми странами, принявшими участие в конференции, официальным текстом МППСС–72 признается английский и французский. МППСС-72 состоят из пяти частей и четырех приложений. Текст каждого правила состоит из п. (а), (в), (с) и т.д., подпунктов с индексами (i), (ii), (iii) и т.д. Такая нумерация относится к большинству правил, за исключением правил 4, 5, 11, 15, 16, 28, 31, 36 и 37, которые состоят только из текста. Существенным дополнением текста является четыре приложения к Правилам и «Руководство по единому применению некоторых правил МППСС–72». Текст Правил с поправками приведен в прил. 5. Количественное значение безопасной скорости не установлено, поскольку невозможно учесть все условия и обстоятельства плавания каждого конкретного судна. В Правилах приведены только факторы, которые следует учитывать при ее назначении. Состояние видимости. При ограниченной видимости уменьшается дальность визуального обнаружения встречных судов и, следовательно, сокращается интервал времени, необходимый на оценку ситуации сближения и принятия действия по предотвращению столкновения. Плотность движения, включая скопления рыболовных или других судов. Усложняется выполнение маневров по расхождению с одним судном из-за наличия в непосредственной близости других судов. Маневренные возможности судна и особенно расстояние, необходимое для полной остановки судна, и поворотливость в преобладающих условиях. Учитывается способность судна предпринять эффективное действие для избежания столкновения в различных ситуациях сближения. Наличие фона освещения ночью, как от береговых огней, так и от рассеяния света собственных огней. Затрудняется распознавание судовых огней встречных судов и, следовательно, уменьшается дистанция их визуального обнаружения. Состояние ветра, моря и течения и близость навигационных опасностей. Ухудшается управляемость судна из-за воздействия внешних факторов и на выбор действия для предупреждения столкновения накладываются ограничения близостью навигационных опасностей. Соотношения между осадкой и имеющимися глубинами. Ухудшается управляемость судна на мелководье, а кроме этого, крупнотоннажные суда из-за своей осадки не могут свободно маневрировать и должны выбирать такую скорость, которая бы позволила другим судам не затруднять их безопасный проход. Для судов, использующих радиолокатор, в Правилах предлагается при назначении безопасной скорости учитывать ряд дополнительных факторов, связанных с техническими ограничениями РЛС и возможностью получения более полной информации об окружающей обстановке: характеристики, эффективность и ограничения радиолокационного оборудования; любые ограничения, накладываемые используемой радиолокационной шкалой дальности; влияние на радиолокационное обнаружение состояния моря и гидрометеорологических факторов, а также других источников помех; возможность того, что радиолокатор может не обнаружить на достаточном расстоянии малые суда, лед и другие плавающие объекты; количество, местоположение и перемещение судов, обнаруженных радиолокатором; более точная оценка видимости, которая может быть получена при радиолокационном измерении расстояния до судов или других объектов, находящихся поблизости. Кроме перечисленных факторов, должна также учитываться квалификация и опытность наблюдателя у РЛС. В сложных условиях плавания величина безопасной скорости судна, оборудованного радиолокатором, как правило, не должна превышать скорости, которая могла бы считаться безопасной для подобного судна без РЛС. Безопасная скорость не является постоянной величиной и должна корректироваться при изменении условий и обстоятельств плавания. Для принятия надлежащих и эффективных действий по предупреждению столкновения она не должна быть, с одной стороны - чрезмерно большой, а с другой - чрезмерно малой, при которой судно может потерять необходимую маневренность. Правило 7. Опасность столкновения. Своевременная оценка опасности ситуации сближения судов в море имеет большое значение для успешного расхождения в соответствии с требованиями МППСС-72. Судоводитель обязан использовать все имеющиеся в его распоряжении методы и технические средства для определения наличия опасности столкновения. К ним можно отнести: визуальное и слуховое наблюдение; наблюдение с помощью РЛС и САРП, АИС; пеленгование объекта; информацию по УКВ связи и т.д. Правило 7 (а) рекомендует в случае сомнения в наличии опасности столкновения считать, что такая опасность существует. Обнаружив любой объект на воде, необходимо сразу же взять на него пеленг и зафиксировать его значение. На наличие опасности столкновения указывает либо относительное постоянство пеленга на объект, либо малая величина его изменения. Измерив несколько пеленгов, можно судить о наличии опасности столкновения. При пеленговании рекомендуется брать одну и ту же часть приближающегося судна (трубу, мачту, отличительный огонь). В то же время в п. (d) указывается, что опасность столкновения может иногда существовать, даже если пеленг заметно изменяется. Подобные ситуации возникают при встрече в море с очень большим судном, буксирным караваном, а также при малых расстояниях между сближающимися судами. В таких случаях даже заметное изменение пеленга, взятого на носовую часть большого судна или буксира, не устраняет полностью возможность столкновения с их кормовой частью. При этом варианте сближения необходимо брать два пеленга: один на нос, другой на кормовую часть протяженного объекта. Если оба пеленга будут затем заметно изменяться в одну и ту же сторону, то только тогда можно сделать вывод о том, что опасности столкновения не существует. Особое место в правиле 7 уделяется грамотному использованию исправного радиолокационного оборудования. Радиолокационное наблюдение подразумевает обзор горизонта на различных шкалах РЛС, получение информации (пеленг, дистанция) о наблюдаемых объектах и ее обработку на специальных планшетах или САРП. При этом определяется курс, скорость цели, линия относительного движения (ЛОД), дистанция кратчайшего сближения (Dкр) и время сближения на эту дистанцию (tкр). Опасность столкновения характеризуется, прежде всего, линейной величиной дистанции кратчайшего сближения (Dкр), которая может быть определена из радиолокационной прокладки или оценена по постоянству пеленга, измеряемого на приближающееся судно. Если Dкр будет меньше назначенной допустимой величины дистанции кратчайшего сближения (Dзад), то существует опасность столкновения. Кроме того, важым критерием, характеризующим степень опасности столкновения, является время плавания судов до точки кратчайшего сближения или до точки столкновения (tкр). Оно зависит от дистанции между судами и суммарной скорости их сближения. Если tкр будет меньше заданной величины (tзад), то ситуация сближения является реально опасной. Величина Dзад не является постоянной, а зависит от условий и обстоятельств каждой конкретной ситуации сближения судов. При ее назначении следует учитывать возможные ошибки в определении Dкр, взаимное положение судов и их скорости, возможность маневра встречного судна, навигационную обстановку и другие факторы. Значение tзад не должно быть меньше времени, необходимого для получения полной информации для анализа ситуации сближения, выбора и проведения маневра для расхождения и оценки его результатов. Правило 8. Действия для предупреждения столкновения. Любое действие для предупреждения столкновения должно предприниматься в соответствии с правилами ч. В и, если позволяют обстоятельства, должно быть уверенным, своевременным и соответствовать хорошей морской практике. Уверенное действие. Любое изменение курса и скорости должно быть значительным, чтобы его можно было обнаружить с другого судна и у этого другого судна не возникало никаких сомнений в эффективности предпринятых для расхождения действий. Следует избегать неуверенных и нерешительных действий, таких как многократные небольшие изменения курса или скорости, поскольку они могут ввести в заблуждение встречное судно и создать опасную ситуацию. Кроме того, действие должно быть целесообразным, т.е. логичным и понятным для других судов (предприниматься в соответствии с правилами части В). Исходя из общих принципов построения правил маневрирования для предотвращения столкновений и сравнительной эффективности маневров, устанавливается их приоритетность. В большинстве случаев предпочтение отдается изменению курса вправо; далее - уменьшению скорости хода вплоть до полной остановки; затем - изменению курса вправо с одновременным уменьшением скорости и, наконец, - изменению курса влево. Если расхождение происходит в открытом море, то уверенным действием следует считать изменение курса не менее чем на 30 - 90º. Тем самым днем достигается: резкое изменение ракурса судна и створа мачт; ночью - четкое обозначение бортового огня и раствора топовых огней; в условиях ограниченной видимости - существенное, заметное изменение направления следа послесвечения отметки эхо-сигнала судна на экране РЛС. При небольшом изменении курса послесвечение эхо-сигнала на экране РЛС почти не изменяется по сравнению с первоначальным направлением, а если такое изменение и видно, то лишь в тех пределах, которые можно отнести к рысканию судна на курсе, не придав ему значения. В данном случае маневр на расхождение может быть не замечен другим судном и поэтому его нельзя считать эффективным. При визуальном контакте аналогичное изменение курса можно не обнаружить по ракурсу судна и расствору мачт, что может привести к многозначности толкования ситуации и непредсказуемым действиям. Говоря об уверенных действиях, необходимо также учитывать обстоятельства плавания судна. Изменение скорости должно быть весьма существенным, чтобы говорить об уверенности действий. При необходимости снижения скорости оптимальным (уверенным) маневром можно считать быстрое снижение скорости не менее, чем в два раза. Тем самым судоводитель будет иметь больше времени для оценки ситуации сближения судов, что вполне соответствует правилу 8 (е): «Если необходимо предотвратить столкновение или иметь больше времени для оценки ситуации, судно должно уменьшить ход или остановиться, застопорив свои движители или дав задний ход». На комбинированный маневр (курсом и одновременно скоростью) распространяются требования изложенные в правиле 8 п. (а), (b) и (с). Выполнение одновременно двух действий уменьшает, необходимое для маневра, водное пространство по носу судна и увеличивает промежуток времени для надлежащей оценки ситуации. При этом следует помнить, что за результатом действий судна по уклонению наблюдают по радиолокатору на других судах. Необходимо, чтобы предпринятые действия по расхождению были замечены и правильно обработаны судоводителями других судов. Если для расхождения выбирается маневр поворота влево, то его следует (при прочих равных условиях) производить раньше по сравнению с возможным изменением курса вправо. Абсолютная величина безопасной дистанции расхождения не установлена, т. к. зависит от условий и обстоятельств плавания судна (правило 8 п. (d)). Обращается внимание на необходимость тщательного контроля за эффективностью предпринятых для расхождения действий. Правило 8 содержит дополнительное требование (п. (f)) «не затруднять движение». Этот пункт предписывает любому судну по возможности не затруднять движение судам, лишенным возможности управляться, ограниченным в возможности маневрирования, занятым ловом рыбы и т.п. затруднять движение или безопасный проход другого судна, должно, когда этого требуют обстоятельства, предпринять заблаговременные действия с тем, чтобы оставить достаточное водное пространство для безопасного прохода. Своевременное действие. В общем случае своевременным или заблаговременным считается маневр, на выполнение которого имеется достаточный запас времени, с тем, чтобы предупредить возможные неблагоприятные действия другого судна или предпринять дополнительные меры с целью улучшения ситуации сближения. Обычно заблаговременность действия определяется условиями и скоростью сближения, а также видом выбранного для расхождения маневра. Чем больше скорость сближения, тем раньше надо предпринимать действия для предупреждения столкновения. Соответствие действия хорошей морской практике.. Предполагается необходимость учета при расхождении всех обстоятельств и условий конкретной ситуации, в частности: состояния видимости, ветра, волнения моря, района и условий плавания, маневренных качеств своего и, по возможности, другого судна, с которым предстоит расходиться, общепринятого опыта по действиям судоводителей в аналогичных ситуациях и многих других факторов (см. комментарии к правилу 2).
Правило 9. Плавание в узкостях. В правиле установлены общие принципы плавания судов в узкостях, которые в некоторых случаях не имеют прямого отношения к расхождению судов, но при их выполнении всеми судами уменьшается или вообще исключается вероятность возникновения опасных ситуаций сближения. В правиле 9 (а) вводятся новые термины: «узкий проход» и «фарватер». В общем случае это участки водного пространства, стесненные для свободного маневрирования в навигационном отношении. Термин «фарватер», как правило, означает открытый для судоходства канал или проход, на котором поддерживаются достаточные для судоходства глубины. Правило 9 определяет только общий порядок плавания в узкостях, когда судно, насколько это возможно, должно держаться внешней границы прохода или фарватера, которая находится с его правого борта, т. е. устанавливается правостороннее движение. Правильное применение правила должно обеспечить безопасность плавания судов. В случаях возникновения по каким-либо причинам опасности столкновения, правило 9 не освобождает суда от выполнения правил 15 - 17 и 18. Таким образом, судно, следующее правой стороной фарватера и наблюдающее другое судно, опасно пересекающее его курс справа, должно уступить ему дорогу, действуя по правилу 8. Введена категория судов, которые не должны затруднять движение судам, идущим по фарватерам, узким проходам. К этой категории относятся суда длиной менее 20 м, парусные суда и суда, занятые ловом рыбы. Все суда должны избегать постановки на якорь в узком проходе. Вставшее на якорь судно будет мешать свободному движению других судов В узкостях предусмотрены звуковые сигналы для взаимосогласованных действий (табл.12.2). Т а б л и ц а 12.2
Условные обозначения: - продолжительный звук судовым свистком; ● - короткий звук судовым свистком. Правило 10. Плавание по системам разделения движения. Аналогично правилу 9 в правиле 10 установлены общие принципы плавания судов в системах разделения движения, при выполнении которых всеми судами уменьшается или вообще исключается вероятность возникновения опасных ситуаций сближения. Системы разделения движения (СРД), одобренные ИМО, ежегодно публикуются в Извещениях мореплавателям (ИМ № 1). В правиле 10 (а) говорится, что плавание в системах разделения движения судов «не освобождает никакое судно от обязанностей, вытекающих из любого другого правила». Поэтому в случаях возникновения по каким-либо причинам опасности столкновения вступают в силу все другие правила плавания и маневрирования и суда должны действовать в соответствии с ними. В общем случае при плавании по СРД суда должны держаться правее линии или зоны разделения движения и следовать в соответствующей полосе в принятом на ней общем направлении потока движения. При входе в систему разделения или выходе из нее судно должно это сделать под возможно меньшим углом к принятому направлению движения. Обычно такое действие должно осуществляться на конечных участках системы. Суда должны, насколько это практически возможно, избегать пересечения полосы движения, установленной СРД. При вынужденном пересечении судно должно выполнять такое пересечение под углом, по возможности близким к прямому. Заходить в зону разделения движения запрещено, за исключением следующих ситуаций: случаев крайней необходимости во избежание непосредственной опасности; случаев, когда это связано с ловом рыбы в пределах зоны разделения движения. Суда, занятые ловом рыбы, суда длиной менее 20 м или парусные судна согласно п. (i), (j) не должны затруднять безопасное движение судна, идущего в системе разделения движения. П. (g) не рекомендует судам становиться на якорь в пределах СРД или вблизи ее конечных участков. В правило 10 внесены пп. (к) и (l), касающихся судов, ограниченных в возможности маневрировать, занятых деятельностью по поддержанию безопасности мореплавания и работами по прокладке, обслуживанию или поднятию подводного кабеля. Эти суда освобождаются от выполнения требований правила 10 настолько, насколько это необходимо для выполнения указанных работ. В соответствии с резолюцией ИМО А.431 (XI) такие работы могут производиться при выполнении следующих условий: опубликовано уведомление соответствующих властей; в ИМ дана информация о таких судах, работающих в системе разделения движения; работы приостанавливаются в ограниченную видимость. Радиолокационная прокладка. Истинная прокладка - выполняется на крупномасштабных навигационных картах. В фиксированные моменты времени определяется положение цели относительно собственного судна. Соединив полученные точки и зная интервалы времени между обсервациями, определяется курс и скорость цели. Достоинством истинной прокладки является ее наглядность. Недостатком - трудоемкость графических построений для получения параметров ситуации сближения: Dкр,, tкр. Поэтому истинная прокладка практически не используется.
Независимо от интервала наблюдения ( D tн) векторный треугольник строят за промежуток времени 6 мин. В этом случае длина каждого вектора равна 1/10 соответствующей скорости. Сразу после получения первого положения цели в него направляют вектор собственной скорости Vн в масштабе 1: 10 (рис.13.2).
При проведении ЛОД через две точки цели возможны ошибки в оценке ситуации, связанные с промахом в нанесении одной из позиций или маневром цели в промежутке между наблюдениями. Для исключения этих ошибок, если позволяют обстоятельства, следует иметь для первоначальной оценки ситуации три позиции цели, т.е. строить векторный треугольник не в экстраполированном, а в фактическом положении (точка 3) цели через 6 мин после первого наблюдения. Тогда точка 2 будет являться контрольной. Отрезок 1 - 3 представляет собой скорость относительного сближения Vо в масштабе 1: 10. Соединяя начало вектора Vн с точкой 3, получаем вектор скорости цели Vц в том же масштабе. Перпендикуляр, проведенный из центра развертки на ЛОД определяет Dкр. Величину tкр находим, откладывая по ЛОД отрезки, равные Vо.
Если суммарную погрешность М в определении двух относительных позиций цели при построении векторного треугольника (как показано на рис. 13.3) отнести к моменту второго наблюдения, считая, что первое наблюдение выполнено безошибочно, то погрешность определения Dкр можно примерно оценить по следующей формуле:
Погрешности в определении tкр для встречных целей обычно не превышают 0, 5 - 1 мин, а в ситуациях обгона – 2 - 3 мин.
Расчеты и графические построения при выборе маневра расхождения с одной целью в общем случае состоят из следующих операций (рис.13.4): - определяются параметры ситуации сближения и оценивается ее опасность с помощью относительной радиолокационной прокладки;
- через конец вектора Vц проводится линия А3, параллельная ОЛОД, по которой будет откладываться новый вектор относительной скорости сближения при построении векторного треугольника после выполнения маневра. Маневр курсом. Раствором циркуля, равным Vн, на линии А3 делается засечка (точка А). Угол 1ОА - необходимый угол отворота для расхождения с целью на дистанции Dзад. Векторный треугольник ОА3 определяет параметры ситуации сближения после маневра. Точка D пересечения ОЛОД с касательной, проведенной к окружности радиусом Dзад (пунктирная линия), определяет положение цели, когда можно начинать маневр возвращения с первоначальным параметрам движения нашего судна. При наличии навигационных ограничений для плавания в стороне поворота необходимо проверить безопасность выбранного маневра. Для этого выполняется следующее: - с навигационной карты снимается безопасная дистанция отхода от линии первоначального курса S без; - из конца вектора Vн 1 опускается перпендикуляр АВ на вектор Vн; длина перпендикуляра в масштабе 1: 10 равна скорости отхода Vотх от линии первоначального курса; - рассчитывается время расхождения tрас =М D / Vо 1; - рассчитывается дистанция отхода Sотх = Vотх · tрас; - если Sотх > Sбез, то выбранный маневр опасен в навигационном отношении и следует выбрать новый маневр с меньшей скоростью отхода судна от линии первоначального курса. Приведенный метод графического решения задачи выбора маневра курсом основан на предположении мгновенного поворота своего судна на новый курс, что вызывает уменьшение величины Dкр, по сравнению с рассчитанным, при реальном расхождении. Поэтому при радиолокационной прокладке для реального расхождения на Dзад, необходимо учитывать характеристики циркуляции своего судна. На практике применяются следующие способы учета циркуляции: - маневр начинается не в точке М, а раньше на время, равное половине времени поворота судна на курс расхождения. Этот способ является основным для всех ситуаций сближения, кроме обгона;
- маневр начинается не в точке М, а раньше на время, равное половине времени, необходимого для уменьшения скорости от Vн до величины Vн 2. Способ рекомендуется для судов водоизмещением до 25 - 30 тыс. т.; - разновидностью этого способа является способ средней скорости, при котором положение цели во время начала маневра определяется касательной к Dзад, параллельной средней ОЛОД. Направление ОЛОДср определяется из векторного треугольника по значению средней скорости Vcр = 0, 5 ( Vн + Vн 2.) (рис. 13.5); - ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной: D D = 0, 3 Vн tv, где tv - мера инерционности, численно равная времени падения скорости судна наполовину при маневре “Стоп”. Способ рекомендуется для судов водоизмещением менее 1000 т. Возвращение к исходным параметрам движения аналогично маневру курсом. Маневр курсом и скоростью одновременно. Конец нового вектора скорости своего судна при данном виде маневра должен лежать на линии А3. На рис. 13.4 выбран отворот вправо с уменьшением скорости - вектор Vнз. Учет циркуляции производится аналогично маневру курсом. Далее производится учет инерции
- суда встречного потока имеют длинные и параллельные друг другу следы послесвечения; - центр развертки позволяет оценить положение своего судна относительно целей своего потока. В общем случае следует придерживаться примерно середины потока попутных судов. Если судно пересекает полосу движения (что оно должно избегать насколько это практически возможно), то в соответствии с правилами, то данный маневр следует выполнять перпендикулярно к общему направлению движения потока. Поэтому основным видом маневра для расхождения является изменение скорости. При следовании перпендикулярным потоку курсом и при наличии опасности столкновения с одним из судов потока в ситуациях, когда собственное судно должно уступать дорогу, оно сбавляет ход, чтобы пропустить опасное судно. Особенность решения задачи расхождения состоит в необходимости своевременного увеличения скорости для расхождения на безопасном расстоянии по носу у следующего судна потока. В зависимости от расстояния между судами потока, может возникнуть необходимость остановиться, пропустить несколько судов и только затем давать ход. При необходимости выхода из полосы движения с пересечением встречной полосы ведется радиолокационная прокладка целей А и В, между которыми предполагают пересечь поток (рис 13.7).
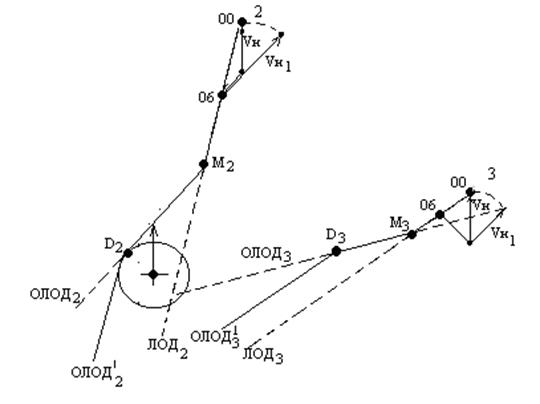
§ При выборе маневра расхождения с опасной целью, когда на экране РЛС наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие потенциально опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для опасного и всех потенциально опасных судов. Как правило, на маневренный планшет наносится полный анализ ситуации до момента окончания маневра расхождения и возвращения к исходным параметрам движения своего судна. Рассмотрим последовательность действий при выборе маневра расхождения для одной конкретной ситуации сближения: - производится глазомерная оценка ситуации сближения, определяются опасные и потенциально опасные цели. Как видно из рис.13.8, цели 1 и 2 являются опасными, и в соответствии с правилами маневрирования наше судно должно отвернуть вправо, причем цель 2 требует большего угла отворота. Цель 4 является судном - сателлитом, и при повороте вправо не будет представлять опасности. ЛОД цели 3 при повороте вправо разворачивается в сторону нашего судна, и она будет являться потенциально опасной. Поэтому для радиолокационной прокладки выбираются цели 2 и 3. Прокладку цели 1 можно не вести, поскольку маневр расхождения с целью 2 в любом случае обеспечивает с ней безопасное расхождение; - определяются параметры ситуации сближения и элементы движения целей 2 и 3 из радиолокационной прокладки и выбирается маневр расхождения с опасной целью 2 (рис. 13.9); - проводится анализ радиолокационной прокладки. При выбранном маневре цель 3 становится опасной, и судоводителю приходится выбирать один из следующих возможных вариантов действия. Вариант 1. Проведение выбранного по результатам радиолокационной прокладки маневра расхождения. В этом случае цель 3 становится временно опасной и при возвращении к исходным параметрам движения в точке D 2 обеспечивается расхождение с целью 3 на безопасной дистанции. Вариант 2. Расчет нового маневра расхождения с целью 2 с меньшим углом отворота вправо. Это возможно при более раннем начале маневра. Тогда ОЛОД 3 возможно не пересечет опасную зону Dзад и цель 3 не станет опасной. Вариант 3. Расчет нового маневра расхождения с целью 3. При выборе второго варианта действия следует учитывать, что время, затраченное на расчет нового маневра расхождения, может не позволить начать его ранее, чем это определено в первом варианте. Третий из возможных вариантов потребует значительно большего угла отворота и поэтому связан с большими потерями времени на расхождение. Таким образом, в данной ситуации, учитывая, что второй вариант, так же как и первый, приводит только к временному ухудшению ситуации сближения с целью 3, видимо, целесообразно остановиться на первом варианте действий, поскольку существует довольно большой запас расстояния между собственным судном и целью 3 в момент возвращения к исходным параметрам движения.
Средства автоматической радиолокационной прокладки (САРП) - это радиолокационные информационно-вычислительные комплексы, обеспечивающие автоматизацию обработки радиолокационной информации и информации от гирокомпаса и лага. При работе с САРП судоводитель освобождается от операции ручного съема радиолокационных пеленгов и дистанций целей и их графической прокладки на радиолокационном планшете. Указанные операции выполняются в автоматическом режиме на экране индикатора. Это позволяет судоводителю уделять основное внимание вопросам наблюдения, оценки ситуации сближения, выбора и выполнения маневра для безопасного расхождения и контроля его эффективности. В то же время грамотное и полное использование возможностей САРП предполагает не абсолютное его предпочтение другим методам наблюдения и оценки опасности ситуации сближения, а совместное их применение и обязательный взаимный контроль. Необходимо отметить, что САРП является только датчиком необходимой для расхождения информации, а главная задача судоводителя при использовании САРП состоит в умении грамотно использовать эту информацию при принятии решения по безопасному расхождению. Такое умение грамотно использовать информацию должно быть основано на четком представлении о принципе работы, а, следовательно, функциональных возможностях и ограничениях САРП, а также погрешностях выдаваемой информации в различных ситуациях расхождения и внешних условиях плавания. В противном случае риск столкновения при использовании САРП для расхождения становится существенно выше, чем при ручной радиолокационной прокладке. В связи с этим каждый судоводитель должен пройти соответствующий курс обучения (включая тренажерную подготовку) по программам «Радиолокационное наблюдение и прокладка», «Использование САРП». Обучение судоводителей методам работы с САРП не должно сводиться к изучению только технической стороны вопроса. Освоение САРП как технического средства должно обеспечивать способность судоводителя квалифицированно осуществлять регулировку режимов работы применительно к преобладающим условиям и обстоятельствам плавания. В то же время особое внимание необходимо уделять вопросам анализа ситуации сближения на основе данных САРП и обоснования принимаемого решения по расхождению с учетом МППСС-72 и рекомендаций хорошей морской практики. Минимальные требования по обучению методам использования САРП сформулированы в Резолюции ИМО А.482(12) от 19 ноября 1981 г. Основные требования сводятся к тому, что судоводитель должен знать: - основные типы САРП и характеристики их индикаторов; - требования ИМО к технико-эксплуатационным характеристикам САРП; - факторы, влияющие на работу САРП и его точность; - возможности САРП и его ограничения, задержки в обработке радиолокационной информации; - правила включения и настройки индикаторов САРП; - правила использования предупредительной сигнализации, ее достоинства и недостатки; - правила проверки функционирования САРП; - принципы использования информации в режимах истинного и относительного движения, включая идентификацию опасных целей; - методику ручного и автоматического захвата целей, применение запретных зон в режиме автоматического захвата; - типовое графическое представление информации о цели и ее опасной зоне; - использование информации о прошлых положениях сопровождаемых объектов; - применение Международных правил предупреждения столкновений судов в море при выборе и проигрывании маневра расхождения. Функции САРП Прежде всего, любые САРП выполняют все функции РЛС по отображению на экране радиолокационной обстановки в соответствии с выбранной шкалой дальности и режимом ориентации изображения. Дополнительные, по сравнению с РЛС, функциональные возможности САРП обеспечивают выполнение следующих процедур: - автоматическое обнаружение эхо-сигналов надводных целей в пределах контролируемой зоны на экране САРП, границы которой задаются охранными кольцами, секторами захвата и линиями запрета захвата, отсекающими группы береговых объектов; - ручной или автоматический (по выбору судоводителя) захват целей на сопровождение (АС); - одновременное автоматическое сопровождение, обработка, отображение и непрерывное обновление данных не менее чем по 20-ти целям (сопровождаемые цели должны быть четко обозначены специальными маркерами); - непрерывное автоматическое определение пеленга и дистанции сопровождаемых целей и определение пеленга и дистанции эхо-сигнала любого нового объекта, появляющегося на экране САРП; - непрерывное автоматическое определение элементов движения (курса и скорости) и элементов сближения (дистанции и времени кратчайшего сближения) для всех сопровождаемых целей; тенденция движения цели должна определяться через 1 мин после начала АС, а вектор экстраполированного перемещения цели с заданной точностью - через 3 мин после начала АС; - непрерывное обновление на экране САРП вторичной радиолокационной информации, характеризующей элементы движения сопровождаемых целей и параметры ситуации сближения, в векторной или другой графической форме, четко указывающей экстраполированное перемещение целей; - дополнительное отображение на экране четырех разнесенных по времени через равные промежутки предыдущих положений сопровождаемых целей за период не менее 8 мин; - выдача на индикацию и непрерывное обновление буквенно-цифровой информации для любой сопровождаемой цели по выбору судоводителя; - возможность изменения длины вектора на экране САРП; - графическая имитация (проигрывание) маневра расхождения со всеми находящимися на автосопровождении целями, при условии, что элементы их движения останутся неизменными, а так же с учетом заданного времени начала маневра и инерционно-маневренных характеристик собственного судна (в течение всего времени имитации маневра обработка и отображение информации по всем сопровождаемым целям не должны прерываться); - обнаружение маневра цели и соответствующая корректировка выдаваемой информации (определение тенденции изменения относительного движения цели в течение 1 мин после завершения маневра, экстраполированное перемещение цели с заданной точностью в течение 3 мин после завершения маневра); - звуковая и световая предупредительная сигнализация об «опасных событиях», под которыми понимают появление новой и опасной цели (цель, вызвавшая предупредительный сигнал, должна отчетливо обозначаться на экране САРП); потеря цели, в том числе опасной (положение цели на момент потери должно отчетливо отображаться на экране САРП); начало маневра цели; сближение с целью на установленное предельное расстояние; неисправное функционирование САРП, выявившееся при автоматической тестовой проверке и т. д. Общие технико-эксплуатационные требования к САРП сформулированы в Резолюции ИМО А.422 (XI) от 15 ноября 1979 г. В числе этих требований отмечаются следующие: - судоводитель должен иметь возможность выбора шкал дальности, режима ориентации и стабилизации радиолокационного изображения, режима представления векторов (при этом должна быть обеспечена четкая индикация выбранного режима); - после изменения режима работы САРП (переключения шкалы дальности, ориентации, стабилизации, вида векторов), время восстановления всей информации о целях на экране САРП не должно превышать времени четырех оборотов антенны; - должна быть предусмотрена независимая регулировка яркости радиолокационного изображения и вторичной информации, вплоть до полного исключения последней; - информация САРП не должна маскировать радиолокационное изображение в такой степени, чтобы затруднялось обнаружение целей; - индикация данных САРП должна находиться под контролем судоводителя, должна быть предусмотрена возможность сброса ненужной информации в любой требуемый момент; - должна быть предусмотрена возможность включения и выключения предупредительной сигнализации судоводителем; - САРП не должно ухудшать характеристики сопрягаемых с ним датчиков навигационной информации (РЛС, гирокомпаса, лага), а сопряжение с другой аппаратурой не должно ухудшать характеристики самого САРП; - в САРП должны быть предусмотрены тестовые программы для периодической автоматической проверки работы САРП и сигнализация о неисправностях, позволяющая судоводителю контролировать правильность работы САРП.
§ 14.2. Основные ограничения САРП, которые необходимо учитывать при расхождении Поскольку САРП обеспечивает автоматическую обработку с помощью ЭВМ сигналов РЛС, то все ограничения радиолокатора входят как составная часть в ограничения САРП и их необходимо учитывать при расхождении. Это, прежде всего ограничения, накладываемые используемой шкалой дальности, возможность не обнаружить эхо-сигналы от малых судов, помехи радиолокационному обнаружению из-за состояния моря, дождя, тумана, теневые секторы и т.д. Алгоритмы обработки информации, реализованные в САРП, накладывают дополнительные ограничения. Основными из них являются следующие: - при автоматическом захвате целей на АС, особенно в сложных условиях плавания, на экране индикатора наряду с полезной информацией отображаются обработанные сигналы от помех, береговой черты, которые маскируют полезную информацию, приводят к переполнению каналов автосопровождения, когда общей число целей превышает число каналов для их обработки, и в общем случае затрудняют правильную оценку ситуации. В то же время ни одно из существующих САРП не обеспечивает гарантированного обнаружения и захвата на автосопровождение всех целей, в том числе и опасных. В ряде САРП при нахождении целей на одном пеленге очередная цель может быть захвачена на АС только после обработки и выдачи данных по ранее захваченной цели, т.е. существенно позже ее появления на экране. Поэтому использование САРП только в режиме автоматического захвата на АС нельзя рассматривать как надлежащее радиолокационное наблюдение; - при неустойчивом эхо-сигнале (малые суда, сопровождение в условиях помех) может произойти сброс цели с АС и информация по ней выдаваться не будет. При близком расхождении двух целей, когда пересекаются их стробы сопровождения, возможен срыв АС и потеря одной цели. В этом случае другая цель будет иметь два вектора, один из которых будет ложным. В некоторых случаях в таких ситуациях стробы сопровождения могут перебрасываются с одной цели на другую, что будет выглядеть на экране как внезапный маневр целей с дальнейшим их сбросом с АС; - сигналы РЛС, гирокомпаса и лага поступают в САРП с погрешностями. При бортовой качке судна, наличии помех, маневрировании и рыскании собственного судна, рыскании и качке цели погрешности датчиков увеличиваются. Поэтому при вычислении элементов движения цели и параметров ситуации сближения используется «сглаживание», т.е. получение осредненных значений сигналов за период 10 - 15 оборотов антенны. При этом предполагается, что цель движется прямолинейно и равномерно и каждый оборот антенны строб сопровождения перемещается в предвычисленное место по линии движения цели. Такая обработка обеспечивает более высокую (по сравнению с ручной радиолокационной прокладкой) точность вырабатываемых параметров, но приводит к задержке выдачи достоверных данных до трех минут с момента взятия цели на сопровождение; - погрешности вычисленных элементов движения цели и параметров ситуации сближения спустя три минуты с момента взятия цели на АС и ее движении постоянным курсом и скоростью могут достигать: истинный курс цели - ± 5° - 7°; истинная скорость цели - ± 1, 2 уз; дистанция кратчайшего сближения - ± 0, 7 мили; время кратчайшего сближения - ± 1 минута. - реализованные в САРП алгоритмы сглаживания, рассчитанные на прямолинейное и равномерное движение, приводят к тому, что маневр цели обнаруживается со значительным запозданием, а данные, выдаваемые САРП по маневрирующей цели, будут ненадежны с момента начала маневра до 3 - 4 мин после его окончания. Так, например, при уменьшении скорости цели на постоянном курсе погрешности в выдаваемом САРП курсе цели достигают 90° и более. При отсутствии визуального контакта использование такой информации может привести к неверной оценке ситуации и выбору ошибочного маневра. При «резких» маневрах курсом цель даже может выйти за пределы перемещающегося прямолинейно предвычисленного строба и сброситься с АС; - при маневрировании собственного судна выдаваемая САРП информация по всем сопровождаемым целям будет ненадежна. Возможно ложное маневрирование сопровождаемых целей - отклонение векторов целей от их первоначального положения, хотя фактически цели следуют постоянным курсом и скоростью. При резком маневре возможен сброс целей с АС. Общие сведения об АИС Автоматическая информационная (идентификационная) система (АИС) обеспечивает автоматический обмен навигационной и иной информацией, связанной с безопасностью мореплавания, между судовыми и другими станциями АИС по специальному каналу радиосвязи. Для передачи и приема информации в АИС используется транспондер ОВЧ (УКВ) диапазона, обеспечивающий дальность действия 25 – 30 миль в зависимости от высоты антенн. Основные компоненты информации, передаваемой по каналам АИС, приведены в табл. 15.1. Интервалы передачи информации различного вида приведен в табл. 15.2. Интервалы передачи динамической информации приведен в табл. 15.3. Для целей расхождения в основном используется динамическая информация. Одной из причин появления АИС явились имеющиеся ограничения РЛС и САРП для решения задачи предупреждения столкновений судов, рассмотренные в гл.12, 13, 14. Достоинства АИС, устраняющие некоторые из таких ограничений при решении задач по предупреждению столкновений судов, сводятся к следующему: 1. Взаимный обмен координатами, определенными с высокой точностью (с помощью глобальной спутниковой навигационной системы (СНС) GPS или ГЛОНАСС в дифференциальном режиме их использования – 2 - 10 м), а также информацией о текущем курсе повышает точность определения элементов движения судов, а отсюда и эффективность расхождения в море. 2. Обмен координатами помогает судоводителю в случае потери сопровождаемой цели быстро оценить опасность такой ситуации, исключает переброс маркеров сопровождаемых целей при их сближении, потери целей при проходе их близко от берега, под мостами, в узких местах фарватеров или проходящих вблизи плавающих навигационных знаков и т. п. Благодаря взаимному обмену данными о гирокомпасном курсе практически в реальном времени, обеспечивается информация о направлении диаметральной плоскости судов-целей и их ракурсе, что способствует принятию правильного решения при расхождении. Маневр судна-цели легко обнаруживается как по изменению значения гирокомпасного курса, так и путем передачи значения скорости поворота, что позволяет устранить большие трудности, ранее возникавшие при использовании САРП. 3. На работу АИС не влияют осадки и волнение моря, как это имеет место при использовании РЛС, что обеспечивает возможность наблюдения за малыми судами в условиях сильного волнения моря. 4. Предупреждению столкновений судов будет способствовать также взаимный обмен между участниками движения информацией о типе судна, его осадке, размерах и навигационных параметрах, а также о планируемых маневрах. Передача позывных или названия судна предоставляет возможность адресного вызова судна по УКВ в непонятных или опасных ситуациях, что особенно важно в условиях ограниченной видимости или ночью.
Т а б л и ц а 15.1
Статическая информация | |||||||||||||||||||||||||||||||||||||||||||||
| ИНМПС | Присвоенный судну идентификационный номер Морской подвижной службы. Вводится при установке аппаратуры | ||||||||||||||||||||||||||||||||||||||||||||
| Название и позывной сигнал судна | Вводится при установке аппаратуры. Может меняться только при перерегистрации судна | ||||||||||||||||||||||||||||||||||||||||||||
| Номер Международной морской организации | Вводится при установке аппаратуры. Изменению не подлежит | ||||||||||||||||||||||||||||||||||||||||||||
| Тип судна | Вводится при установке аппаратуры. Изменению не подлежит | ||||||||||||||||||||||||||||||||||||||||||||
| Длина и ширина судна | Вводится совместно с положением антенны | ||||||||||||||||||||||||||||||||||||||||||||
| Положение антенны датчика местоположения судна | Может меняться при наличии нескольких приемных антенн | ||||||||||||||||||||||||||||||||||||||||||||
| Тип датчика местоположения судна | Вводится при установке аппаратуры в зависимости от сопрягаемого навигационного оборудования | ||||||||||||||||||||||||||||||||||||||||||||
| Высота над уровнем киля | Дополнительная информация о высоте мачт или других конструкций | ||||||||||||||||||||||||||||||||||||||||||||
|
Динамическая информация
| |||||||||||||||||||||||||||||||||||||||||||||
| Координаты судна | Автоматически считываются с датчика местоположения, подключенного к аппаратуре АИС | ||||||||||||||||||||||||||||||||||||||||||||
| Признак точности координат | Характеризует точность определения координат - хуже 10м или лучше 10м (при использовании дифференциального режима СНС) | ||||||||||||||||||||||||||||||||||||||||||||
| Время определения координат | Время по шкале UTC. Автоматически считывается с датчика местоположения, подключенного к аппаратуре АИС | ||||||||||||||||||||||||||||||||||||||||||||
| Путевой угол, путевая скорость (относительно грунта) | Автоматически считывается с приемоиндикатора СНС, подключенного к аппаратуре АИС | ||||||||||||||||||||||||||||||||||||||||||||
| Курс | Автоматически считывается с судового курсоуказателя (гирокомпаса), подключенного к аппаратуре АИС | ||||||||||||||||||||||||||||||||||||||||||||
| Навигационный статус судна | Вводится вручную с выбором из списка. Изменения рекомендуется делать одновременно с включением огней или с подъемом знаков, предписанных МППСС-72 (например: «судно не управляется», «на якоре» и т.д.) | ||||||||||||||||||||||||||||||||||||||||||||
| Угловая скорость | Скорость поворота (изменения курса). Автоматически вводиться с соответствующего датчика, если он имеется на судне | ||||||||||||||||||||||||||||||||||||||||||||
|
Рейсовые данные
| |||||||||||||||||||||||||||||||||||||||||||||
| Осадка | Вводится вручную и изменяется при необходимости | ||||||||||||||||||||||||||||||||||||||||||||
| Опасный груз | При наличии опасного груза вводиться вручную перед началом рейса | ||||||||||||||||||||||||||||||||||||||||||||
| Пункт назначения, ожидаемое время прибытия | Вводится вручную перед началом рейса, изменяется при необходимости | ||||||||||||||||||||||||||||||||||||||||||||
| План перехода | Определяется координатами путевых точек. Вводится вручную перед началом рейса, изменяется при необходимости | ||||||||||||||||||||||||||||||||||||||||||||
| Количество людей на борту | Дополнительная информация. Передается по инициативе судна или запросу береговой станции | ||||||||||||||||||||||||||||||||||||||||||||
Т а б л и ц а 15.2
| Вид информации | Интервалы передачи |
| Статическая информация | Каждые 6 мин, при изменении данных и по требованию |
| Динамическая информация | Согласно табл. 15.3. в зависимости от режима плавания, изменения скорости и курса. |
| Информация о рейсе | Каждые 6 мин при изменении данных и по требованию |
| Сообщения, относящиеся к безопасности мореплавания | При необходимости |
Т а б л и ц а 15.3
| Режим плавания | Интервалы передачи динамической информации |
| Судно на якоре или в процессе швартовки, перемещающееся со скоростью не более 3 уз | 3 мин. |
| Судно на якоре или в процессе швартовки, перемещающееся со скоростью более 3 уз | 10 с |
| Судно на ходу (0 - 14 уз) | 10 с |
| Судно на ходу (0 - 14 уз) и изменение курса | 3 1/3 с |
| Судно на ходу (14 - 23 уз) | 6 с |
| Судно на ходу (14 - 23 уз) и изменение курса | 2 с |
| Судно на ходу (более 23 уз) | 2 с |
| Судно на ходу (более 23 уз) и изменение курса | 2 с |
5. Передача размеров судна и места установки антенны СНС позволяет отображать контуры судов в масштабе электронной карты или шкалы радара вокруг точки расположения антенны, что может помочь при маневрировании в узкости, особенно при ограниченной видимости или ночью.
6. При передаче поворотных точек в маршруте плавания судов, имеется уникальная возможность учета планируемых маневров и поворотов как собственного судна, так и всех целей.
Наряду с очевидными достоинствами, АИС обладает и существенными недостатками. К таким недостаткам относятся следующие:
1. Эффективное использование АИС возможно только при оснащении всех судов, включая малотоннажные, конвенционной аппаратурой АИС и конвенционной аппаратурой отображения интегрированной информации от АИС и РЛС, позволяющей решать задачи предупреждения столкновений судов. До этого АИС может использоваться только как средство получения дополнительной информации к данным, полученным от РЛС и САРП. Радиолокационными станциями нового поколения, в которых реализована функция отображения информации от АИС, пока оборудовано мало судов. Большая часть существующего радиолокационного оборудования, установленного на судах, не может отображать информацию от АИС.
2. Нельзя рассматривать вопрос о будущей замене радиолокационных средств на АИС, поскольку ее информация относится только к объектам, на которых установлены транспондеры, в то время как радиолокатор позволяет наблюдать любые объекты, отражающие радиоволны (знаки навигационного ограждения, суда, береговую черту и др.).
3. В соответствии с решением ИМО, только АИС, применяемая на глобальной основе, может стать инструментом для предупреждения столкновений и мониторинга судов. Это означает, что внедрению на судах подлежит только то оборудование АИС, параметры которого жестко регламентированы на международной основе. В этом случае будет обеспечена совместимость оборудования, установленного на разных судах, и высокая эффективность его использования.
4. Судоводители должны принимать во внимание тот фактор, что АИС может выйти из строя или быть выключенной по решению капитана при определенных обстоятельствах (нахождение судна в районе военных или террористических действий).
В соответствии с требованиями гл. 5 Международной Конвенции по охране человеческой жизни на море все суда валовой вместимостью 300 регистровых тонн и выше, совершающие международные рейсы, должны быть оборудованы АИС не позднее 31 декабря 2004 г.
По решению морских Администраций государств суда двух следующих категорий могут быть освобождены от установки АИС: суда, выводимые из эксплуатации в течение двух лет после оговоренной даты установки АИС; суда местного плавания, эксплуатируемые в районах, где интенсивность судоходства не требует установки АИС.
Учитывая, что требования гл. 5 Международной Конвенции по охране человеческой жизни на море являются минимальными, морские Администрации государств вправе установить более жесткие требования к установке АИС на судах, находящихся под их юрисдикцией, как по срокам, так и по категориям судов.
Таким образом, оснащенность судов АИС, особенно в период внедрения, в значительной степени зависит от технической политики национальных морских Администраций. Морские Администрации ряда государств уже пришли к мнению, что из судов, прямо не попадающих под требования Конвенции СОЛАС, целесообразно в минимальные сроки оборудовать АИС лоцманские суда, портовые буксиры, бункеровщики – т. е. те виды вспомогательных судов, которые активно взаимодействуют с транспортными судами, подлежащими оборудованию АИС. Еще одним видом судов, для которых решение национальных морских Администраций о первоочередной установке АИС не вызывает сомнений, являются пассажирские суда
При внедрении АИС на судах следует принимать во внимание требования Правила 19 Конвенции СОЛАС к навигационному оборудованию, сопрягаемому с АИС. Приемник СНС, обеспечивающий автоматическое определение координат судна, является обязательным для установки на всех судах, независимо от их размера. Таким образом обеспечивается ввод координат судна в АИС от датчика местоположения, используемого в судовождении.
Суда валовой вместимостью более 300 рег. т, а также все пассажирские суда, независимо от размера, должны оборудоваться РЛС. При этом на судах от 300 до 500 рег. т РЛС должны дополняться средством электронной прокладки для оценки опасности столкновения, а на судах от 500 до 3000 рег. т - средством автоматического сопровождения радиолокационных целей. Суда более 3000 рег. т должны оснащаться второй РЛС и вторым средством автоматического сопровождения. Суда более 10000 рег. т должны оборудоваться полнофункциональными САРП. РЛС с функциями автоматической радиолокационной прокладки могут служить наиболее эффективным средством для отображения информации АИС
Гирокомпас как обязательное навигационное оборудование устанавливается на судах валовой вместимостью более 500 рег. т. На судах меньшей вместимости обязательным является магнитный компас, причем на судах более 300 рег. т предусматривается устройство для передачи магнитного курса в РЛС (со средством электронной прокладки) и в аппаратуру АИС. Следовательно, при установке АИС на судах валовой вместимостью менее 300 рег. т может не выполняться требование о вводе и передаче информации о курсе. Датчики угловой скорости являются обязательными для установки на судах валовой вместимостью более 50000 рег. т. При их отсутствии на судах меньшей вместимости АИС может вырабатывать и передавать информацию об изменении курса по данным гирокомпаса.
Отображение информации АИС
Каждое судно, оборудованное АИС, передает и принимает информацию от других судов находящихся в радиусе действия, ограниченном распространением радиоволн ОВЧ (УКВ) диапазона (20-30 миль) в соответствии с табл. 15.1 - 15.3.. Принятая информация автоматически обрабатывается и отображается на одном из судовых навигационных дисплеев (РЛС/САРП, электронная картографическая система, интегрированная навигационная система). Синхронизация работы всех станций АИС обеспечивается глобальной спутниковой навигационной системой GPS или ГЛОНАСС, которая также является источником информации о координатах и векторе скорости.
 При отображении на дисплее цели в АИС подразделяются на пассивные, активизированные, выбранные, опасные и потерянные.
При отображении на дисплее цели в АИС подразделяются на пассивные, активизированные, выбранные, опасные и потерянные.
 Пассивная цель - условное обозначение цели, показывающее присутствие в определенном месте и ориентацию оборудованного АИС судна. До тех пор, пока цель не будет опрошена, никакой дополнительной информации по ней не представляется, что позволяет избежать информационной перегрузки системы.
Пассивная цель - условное обозначение цели, показывающее присутствие в определенном месте и ориентацию оборудованного АИС судна. До тех пор, пока цель не будет опрошена, никакой дополнительной информации по ней не представляется, что позволяет избежать информационной перегрузки системы.
 Для отображения применяется (рис. 15.1) равнобедренный остроугольный треугольник, центр которого показывает отображаемое место цели. Вершина треугольника должна быть направлена по линии мгновенного курса цели или, при отсутствии данных о мгновенном курсе, по линии пути относительно грунта. Размеры условного обозначения «пассивной» цели могут быть меньше размеров условного обозначения «активизированной» цели.
Для отображения применяется (рис. 15.1) равнобедренный остроугольный треугольник, центр которого показывает отображаемое место цели. Вершина треугольника должна быть направлена по линии мгновенного курса цели или, при отсутствии данных о мгновенном курсе, по линии пути относительно грунта. Размеры условного обозначения «пассивной» цели могут быть меньше размеров условного обозначения «активизированной» цели.
Активизированная цель - условное обозначение цели после ее автоматического или ручного опроса для отображения представляемой графически информации, включая место цели, путевой угол цели, скорость цели относительно грунта, мгновенный курс цели, угловая скорость поворота или сторона поворота цели, в зависимости от поступающих данных. Для отображения применяется (рис 15.2) равнобедренный остроугольный треугольник, центр которого показывает отображаемое место цели. Вершина треугольника должна быть направлена по линии мгновенного курса цели или (при отсутствии данных о мгновенном курсе) по линии пути относительно грунта. Вектор перемещения относительно грунта должен быть представлен в виде отрезка пунктирной линии, с началом в центре треугольника, а мгновенный курс - в виде отрезка сплошной линии фиксированной длины с началом в вершине треугольника. Флажок на линии мгновенного курса и его направление указывает на поворот цели в направлении флажка, что позволяет незамедлительно обнаружить ее маневр. Может быть также предусмотрено отображение линии прогнозируемого пути.
 Выбранная цель - условное обозначение какой-либо оборудованной АИС цели, после ручного выбора режима отображения о ней подробной цифровой информации в отдельной области экрана. В этой области будут отображены как полученные данные о цели, так и расчетные значения расстояния кратчайшего сближения и времени следования до точки кратчайшего сближения. Условное обозначение выбранной цели приведено на рис 15.3.
Выбранная цель - условное обозначение какой-либо оборудованной АИС цели, после ручного выбора режима отображения о ней подробной цифровой информации в отдельной области экрана. В этой области будут отображены как полученные данные о цели, так и расчетные значения расстояния кратчайшего сближения и времени следования до точки кратчайшего сближения. Условное обозначение выбранной цели приведено на рис 15.3.
Опасная цель - условное обозначение оборудованной АИС цели (опрошенной или нет), когда ее дистанция и время кратчайшего сближения Dкр и tкр меньше заданных значений Dзад и tзад.

 Условное обозначение цели (рис. 15.4) должно быть показано толстой линией, ясно отличимой от обычных линий. Могут быть увеличены размеры условного обозначения. Изображению цели должны сопутствовать вектор, мгновенный курс и указание угловой скорости поворота цели. Условное обозначение должно мигать, пока не будет подтверждено судоводителем, что сигнал опасности им принят. На цветных экранах треугольник должен быть красным
Условное обозначение цели (рис. 15.4) должно быть показано толстой линией, ясно отличимой от обычных линий. Могут быть увеличены размеры условного обозначения. Изображению цели должны сопутствовать вектор, мгновенный курс и указание угловой скорости поворота цели. Условное обозначение должно мигать, пока не будет подтверждено судоводителем, что сигнал опасности им принят. На цветных экранах треугольник должен быть красным

 Потерянная цель - условный знак, отображающий последнее достоверное местоположение оборудованной АИС цели на момент, предшествующий прекращению приема от нее данных. Для отображения применяется ясно выделяющаяся, сплошная, перпендикулярная последнему направлению ориентации
Потерянная цель - условный знак, отображающий последнее достоверное местоположение оборудованной АИС цели на момент, предшествующий прекращению приема от нее данных. Для отображения применяется ясно выделяющаяся, сплошная, перпендикулярная последнему направлению ориентации  условного обозначения цели, линия, перечеркивающая это условное обозначение (рис. 15.5). Условное обозначение должно мигать, пока не будет подтверждено судоводителем, что сигнал потери цели им принят. Цель должна быть представлена без вектора, мгновенного курса и указания угловой скорости поворота.
условного обозначения цели, линия, перечеркивающая это условное обозначение (рис. 15.5). Условное обозначение должно мигать, пока не будет подтверждено судоводителем, что сигнал потери цели им принят. Цель должна быть представлена без вектора, мгновенного курса и указания угловой скорости поворота.
 Дополнительно судоводитель должен иметь возможность выбора и других составляющих информации (см. табл. 15.1) от целей АИС для цифрового отображения. Такая дополнительная информация должна отображаться в отведенной для этого области экрана. Для выбранной цели в дополнительном окне дисплея выдаются данные по судну, включающие название или позывной, координаты или пеленг и дальность, курс и скорость, Dкр и tкр, тип судна, его навигационный статус (например, ограниченное осадкой) и другие данные в соответствии с табл. 15.1. Если полученная от АИС информация является неполной, то она выделяется на экране для отличия от полной информации.
Дополнительно судоводитель должен иметь возможность выбора и других составляющих информации (см. табл. 15.1) от целей АИС для цифрового отображения. Такая дополнительная информация должна отображаться в отведенной для этого области экрана. Для выбранной цели в дополнительном окне дисплея выдаются данные по судну, включающие название или позывной, координаты или пеленг и дальность, курс и скорость, Dкр и tкр, тип судна, его навигационный статус (например, ограниченное осадкой) и другие данные в соответствии с табл. 15.1. Если полученная от АИС информация является неполной, то она выделяется на экране для отличия от полной информации.
Для наложения условных обозначений объектов АИС на другую информацию на том же экране и для расчета характеристик цели (например, времени до прибытия в точку кратчайшего сближения, расстояния кратчайшего сближения) должна применяться общая для этой информации или объектов привязка. Если информация АИС отображается графически на экране РЛС, то аппаратура должна быть способна правильно ориентировать радиолокационное изображение и информацию АИС.
Данные о целях, полученные от РЛС, должны отличаться от данных, полученных от АИС, и быть легко опознаваемыми. У судоводителя должна быть возможность выбора всех целей АИС или любой части из них для графического отображения с индикацией информация о выбранном виде отображения.
При отображении символ встречного судна (треугольник) и метка истинного курса, ориентированные по данным гирокомпаса, может не совпадать с курсом (острым углом треугольника), получаемый по данным глобальной спутниковой навигационной системы (СНС), при наличии дрейфа (сноса).
Для обеспечения одновременной работы многих судовых станций АИС на одном частотном канале используется метод множественного доступа с временным разделением.
ПРЕДУПРЕЖДЕНИЕ СТОЛКНОВЕНИЙ СУДОВ
Глава 12. МЕЖДУНАРОДНЫЕ ПРАВИЛА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ
СУДОВ В МОРЕ (МППСС-72)
§ 12.1 Структура МППСС-72
Конвенция о Международных правилах предупреждения столкновений судов в море была подписана 20 октября 1972 г. МППСС–72 вошли в силу и получили статус международного закона, определяющего правовые отношения между ее участниками, в 1977 г. после ратификации странами, имеющими 65% тоннажа мирового флота, считая суда валовой вместимостью от 100 рег. т и более. МППСС-72 являются основным документом, регламентирующим действия судоводителей при расхождении.
В дальнейшем, с учетом накопленного опыта применения МППСС–72, ИМО был откорректирован текст Правил. В табл. 12.1 приведены данные о принятых ИМО поправках к МППСС-72.
Т а б л и ц а 12.1
| Год принятия поправки к МППСС-72 | Год ратификации поправки в РФ |
| 1981 | 1983 |
| 1987 | 1989 |
| 1989 | 1991 |
| 1993 | 1995 |
| 2001 | с 29.11.2003 |
Любая поправка к Правилам по ее вступлении в силу заменяет предыдущее положение, к которому она относится, для всех участников Конвенции, которые не возражали против ее принятия (ст. VI, п. 5 Конвенции о МППСС–72).
В 1982 г. ИМО разработала и ввела в действие «Руководство по единому применению некоторых правил МППСС–72» (принято на 46-й сессии Комитета по безопасности на море, КБМ/Циркуляр 320)
Согласно Конвенции, подписанной всеми странами, принявшими участие в конференции, официальным текстом МППСС–72 признается английский и французский.
МППСС-72 состоят из пяти частей и четырех приложений. Текст каждого правила состоит из п. (а), (в), (с) и т.д., подпунктов с индексами (i), (ii), (iii) и т.д. Такая нумерация относится к большинству правил, за исключением правил 4, 5, 11, 15, 16, 28, 31, 36 и 37, которые состоят только из текста. Существенным дополнением текста является четыре приложения к Правилам и «Руководство по единому применению некоторых правил МППСС–72».
Текст Правил с поправками приведен в прил. 5.
Последнее изменение этой страницы: 2019-06-08; Просмотров: 1210; Нарушение авторского права страницы
 Относительная прокладка - выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Относительная прокладка - выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике. После получения второго положения соединяют точки 1 и 2 линией, которая является ЛОД, и находят экстраполированное положение цели через 6 мин (положение 3). Для упрощения экстраполяции интервал времени между первым и вторым наблюдениями обычно составляет 3 мин. В противном случае для экстраполяции используется логарифмическая шкала, приведенная в правой части маневренного планшета.
После получения второго положения соединяют точки 1 и 2 линией, которая является ЛОД, и находят экстраполированное положение цели через 6 мин (положение 3). Для упрощения экстраполяции интервал времени между первым и вторым наблюдениями обычно составляет 3 мин. В противном случае для экстраполяции используется логарифмическая шкала, приведенная в правой части маневренного планшета. Погрешности определения параметров ситуации сближения. Одним из факторов, который следует учитывать при назначении заданной дистанции кратчайшего расхождения Dзад, является погрешность в определении Dкр. Она возникает из-за случайных и систематических погрешностей при радиолокационном определении относительного положения цели.
Погрешности определения параметров ситуации сближения. Одним из факторов, который следует учитывать при назначении заданной дистанции кратчайшего расхождения Dзад, является погрешность в определении Dкр. Она возникает из-за случайных и систематических погрешностей при радиолокационном определении относительного положения цели.
 Величина М на шкалах среднего масштаба, как правило, не превышает 1 кб.
Величина М на шкалах среднего масштаба, как правило, не превышает 1 кб. § 13.2. Выбор маневра расхождения с одним судном с использованием РЛС.
§ 13.2. Выбор маневра расхождения с одним судном с использованием РЛС. - выбирается время начала маневра расхождения и на ЛОД наносится точка М положения цели в момент начала маневра расхождения. Из намеченной точки проводится касательная к окружности радиусом Dзад, представляющая собой ожидаемую линию относительного движения после выполнения маневра (ОЛОД);
- выбирается время начала маневра расхождения и на ЛОД наносится точка М положения цели в момент начала маневра расхождения. Из намеченной точки проводится касательная к окружности радиусом Dзад, представляющая собой ожидаемую линию относительного движения после выполнения маневра (ОЛОД);  - ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной радиусу циркуляции - при углах отворота менее 90° и диаметру циркуляции - при больших углах отворота. Этот способ является основным в ситуациях обгона.
- ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной радиусу циркуляции - при углах отворота менее 90° и диаметру циркуляции - при больших углах отворота. Этот способ является основным в ситуациях обгона. Маневр скоростью. Отрезок ОС определяет новый вектор скорости, необходимый для расхождения на Dзад при мгновенном изменении скорости судна до нового значения в точке М положения цели в момент начала маневра. Для учета инерции при радиолокационной прокладке используются следующие способы:
Маневр скоростью. Отрезок ОС определяет новый вектор скорости, необходимый для расхождения на Dзад при мгновенном изменении скорости судна до нового значения в точке М положения цели в момент начала маневра. Для учета инерции при радиолокационной прокладке используются следующие способы:  аналогично маневру скоростью. Возвращение к исходным параметрам движения аналогично маневру курсом.
аналогично маневру скоростью. Возвращение к исходным параметрам движения аналогично маневру курсом.  Особенности радиолокационной прокладки в ситуации обгона. Главной особенностью является необходимость выходить на курс обгона заблаговременно до траверза обгоняемого судна. Для обгона выбирается участок пути, свободный от навигационных опасностей. По курсу обгоняемого судна не должно быть объектов, которые могли бы вызвать его поворот в сторону обгоняющего судна. В отличие от маневра в ситуации пересечения курсов, ОЛОД проводится не по касательной к Dзад, а с таким расчетом, чтобы угол a между ОЛОД и ЛОД был достаточно большим и маневр можно было уверенно обнаружить с обгоняемого судна (рис.13.6). В точке D пересечения ОЛОД с касательной к Dзад, параллельной ЛОД, возвращаются к исходным параметрам движения, т.е. заблаговременно выходят на курс обгона. Величина Dзад (траверзного расстояния между судами во время обгона) должна быть не менее 2 - 3 диаметров циркуляции своего судна.
Особенности радиолокационной прокладки в ситуации обгона. Главной особенностью является необходимость выходить на курс обгона заблаговременно до траверза обгоняемого судна. Для обгона выбирается участок пути, свободный от навигационных опасностей. По курсу обгоняемого судна не должно быть объектов, которые могли бы вызвать его поворот в сторону обгоняющего судна. В отличие от маневра в ситуации пересечения курсов, ОЛОД проводится не по касательной к Dзад, а с таким расчетом, чтобы угол a между ОЛОД и ЛОД был достаточно большим и маневр можно было уверенно обнаружить с обгоняемого судна (рис.13.6). В точке D пересечения ОЛОД с касательной к Dзад, параллельной ЛОД, возвращаются к исходным параметрам движения, т.е. заблаговременно выходят на курс обгона. Величина Dзад (траверзного расстояния между судами во время обгона) должна быть не менее 2 - 3 диаметров циркуляции своего судна.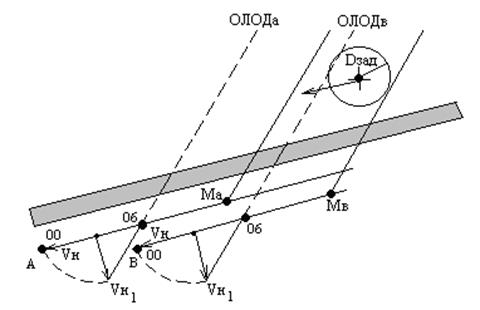 Особенности радиолокационного наблюдения и прокладки при плавании в системах разделения движения. Глазомерное радиолокационное наблюдение с использованием следов послесвечения позволяет ориентироваться в потоке движения судов следующим образом:
Особенности радиолокационного наблюдения и прокладки при плавании в системах разделения движения. Глазомерное радиолокационное наблюдение с использованием следов послесвечения позволяет ориентироваться в потоке движения судов следующим образом:  - для судов попутного потока - следы послесвечения отсутствуют. Появление следов свидетельствует о необходимости приведения скорости своего судна к средней скорости движения судов в потоке, как наиболее безопасной при движении судна в потоке;
- для судов попутного потока - следы послесвечения отсутствуют. Появление следов свидетельствует о необходимости приведения скорости своего судна к средней скорости движения судов в потоке, как наиболее безопасной при движении судна в потоке;  С учетом того, что пересекать полосу необходимо перпендикулярно направлению движения потока, в треугольнике скоростей вектор Vн разворачивают на 90° и проводят ОЛОД целей (пунктирные линии ОЛОДа и ОЛОДв). Затем параллельным перемещением полученных ОЛОД в направлении своего судна определяют положения целей (точки Ма и Мв) в момент начала маневра пересечения полосы движения. Таким образом, особенность радиолокационной прокладки в этом случае заключается в том, что, в отличие от обычного расхождения, выбирается не маневр, а по известному маневру находят безопасное время его выполнения.
С учетом того, что пересекать полосу необходимо перпендикулярно направлению движения потока, в треугольнике скоростей вектор Vн разворачивают на 90° и проводят ОЛОД целей (пунктирные линии ОЛОДа и ОЛОДв). Затем параллельным перемещением полученных ОЛОД в направлении своего судна определяют положения целей (точки Ма и Мв) в момент начала маневра пересечения полосы движения. Таким образом, особенность радиолокационной прокладки в этом случае заключается в том, что, в отличие от обычного расхождения, выбирается не маневр, а по известному маневру находят безопасное время его выполнения. 13.3. Особенности радиолокационной прокладки при расхождении с несколькими судами.
13.3. Особенности радиолокационной прокладки при расхождении с несколькими судами.