|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Радиолокационная прокладка.
Истинная прокладка - выполняется на крупномасштабных навигационных картах. В фиксированные моменты времени определяется положение цели относительно собственного судна. Соединив полученные точки и зная интервалы времени между обсервациями, определяется курс и скорость цели. Достоинством истинной прокладки является ее наглядность. Недостатком - трудоемкость графических построений для получения параметров ситуации сближения: Dкр,, tкр. Поэтому истинная прокладка практически не используется.
Независимо от интервала наблюдения ( D tн) векторный треугольник строят за промежуток времени 6 мин. В этом случае длина каждого вектора равна 1/10 соответствующей скорости. Сразу после получения первого положения цели в него направляют вектор собственной скорости Vн в масштабе 1: 10 (рис.13.2).
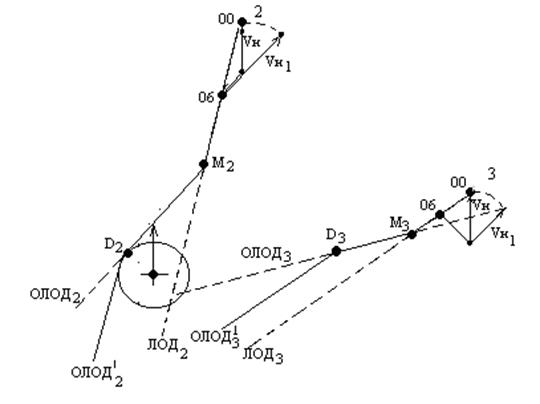
При проведении ЛОД через две точки цели возможны ошибки в оценке ситуации, связанные с промахом в нанесении одной из позиций или маневром цели в промежутке между наблюдениями. Для исключения этих ошибок, если позволяют обстоятельства, следует иметь для первоначальной оценки ситуации три позиции цели, т.е. строить векторный треугольник не в экстраполированном, а в фактическом положении (точка 3) цели через 6 мин после первого наблюдения. Тогда точка 2 будет являться контрольной. Отрезок 1 - 3 представляет собой скорость относительного сближения Vо в масштабе 1: 10. Соединяя начало вектора Vн с точкой 3, получаем вектор скорости цели Vц в том же масштабе. Перпендикуляр, проведенный из центра развертки на ЛОД определяет Dкр. Величину tкр находим, откладывая по ЛОД отрезки, равные Vо.
Если суммарную погрешность М в определении двух относительных позиций цели при построении векторного треугольника (как показано на рис. 13.3) отнести к моменту второго наблюдения, считая, что первое наблюдение выполнено безошибочно, то погрешность определения Dкр можно примерно оценить по следующей формуле:
Погрешности в определении tкр для встречных целей обычно не превышают 0, 5 - 1 мин, а в ситуациях обгона – 2 - 3 мин.
Расчеты и графические построения при выборе маневра расхождения с одной целью в общем случае состоят из следующих операций (рис.13.4): - определяются параметры ситуации сближения и оценивается ее опасность с помощью относительной радиолокационной прокладки;
- через конец вектора Vц проводится линия А3, параллельная ОЛОД, по которой будет откладываться новый вектор относительной скорости сближения при построении векторного треугольника после выполнения маневра. Маневр курсом. Раствором циркуля, равным Vн, на линии А3 делается засечка (точка А). Угол 1ОА - необходимый угол отворота для расхождения с целью на дистанции Dзад. Векторный треугольник ОА3 определяет параметры ситуации сближения после маневра. Точка D пересечения ОЛОД с касательной, проведенной к окружности радиусом Dзад (пунктирная линия), определяет положение цели, когда можно начинать маневр возвращения с первоначальным параметрам движения нашего судна. При наличии навигационных ограничений для плавания в стороне поворота необходимо проверить безопасность выбранного маневра. Для этого выполняется следующее: - с навигационной карты снимается безопасная дистанция отхода от линии первоначального курса S без; - из конца вектора Vн 1 опускается перпендикуляр АВ на вектор Vн; длина перпендикуляра в масштабе 1: 10 равна скорости отхода Vотх от линии первоначального курса; - рассчитывается время расхождения tрас =М D / Vо 1; - рассчитывается дистанция отхода Sотх = Vотх · tрас; - если Sотх > Sбез, то выбранный маневр опасен в навигационном отношении и следует выбрать новый маневр с меньшей скоростью отхода судна от линии первоначального курса. Приведенный метод графического решения задачи выбора маневра курсом основан на предположении мгновенного поворота своего судна на новый курс, что вызывает уменьшение величины Dкр, по сравнению с рассчитанным, при реальном расхождении. Поэтому при радиолокационной прокладке для реального расхождения на Dзад, необходимо учитывать характеристики циркуляции своего судна. На практике применяются следующие способы учета циркуляции: - маневр начинается не в точке М, а раньше на время, равное половине времени поворота судна на курс расхождения. Этот способ является основным для всех ситуаций сближения, кроме обгона;
- маневр начинается не в точке М, а раньше на время, равное половине времени, необходимого для уменьшения скорости от Vн до величины Vн 2. Способ рекомендуется для судов водоизмещением до 25 - 30 тыс. т.; - разновидностью этого способа является способ средней скорости, при котором положение цели во время начала маневра определяется касательной к Dзад, параллельной средней ОЛОД. Направление ОЛОДср определяется из векторного треугольника по значению средней скорости Vcр = 0, 5 ( Vн + Vн 2.) (рис. 13.5); - ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной: D D = 0, 3 Vн tv, где tv - мера инерционности, численно равная времени падения скорости судна наполовину при маневре “Стоп”. Способ рекомендуется для судов водоизмещением менее 1000 т. Возвращение к исходным параметрам движения аналогично маневру курсом. Маневр курсом и скоростью одновременно. Конец нового вектора скорости своего судна при данном виде маневра должен лежать на линии А3. На рис. 13.4 выбран отворот вправо с уменьшением скорости - вектор Vнз. Учет циркуляции производится аналогично маневру курсом. Далее производится учет инерции
- суда встречного потока имеют длинные и параллельные друг другу следы послесвечения; - центр развертки позволяет оценить положение своего судна относительно целей своего потока. В общем случае следует придерживаться примерно середины потока попутных судов. Если судно пересекает полосу движения (что оно должно избегать насколько это практически возможно), то в соответствии с правилами, то данный маневр следует выполнять перпендикулярно к общему направлению движения потока. Поэтому основным видом маневра для расхождения является изменение скорости. При следовании перпендикулярным потоку курсом и при наличии опасности столкновения с одним из судов потока в ситуациях, когда собственное судно должно уступать дорогу, оно сбавляет ход, чтобы пропустить опасное судно. Особенность решения задачи расхождения состоит в необходимости своевременного увеличения скорости для расхождения на безопасном расстоянии по носу у следующего судна потока. В зависимости от расстояния между судами потока, может возникнуть необходимость остановиться, пропустить несколько судов и только затем давать ход. При необходимости выхода из полосы движения с пересечением встречной полосы ведется радиолокационная прокладка целей А и В, между которыми предполагают пересечь поток (рис 13.7).
§ При выборе маневра расхождения с опасной целью, когда на экране РЛС наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие потенциально опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для опасного и всех потенциально опасных судов. Как правило, на маневренный планшет наносится полный анализ ситуации до момента окончания маневра расхождения и возвращения к исходным параметрам движения своего судна. Рассмотрим последовательность действий при выборе маневра расхождения для одной конкретной ситуации сближения: - производится глазомерная оценка ситуации сближения, определяются опасные и потенциально опасные цели. Как видно из рис.13.8, цели 1 и 2 являются опасными, и в соответствии с правилами маневрирования наше судно должно отвернуть вправо, причем цель 2 требует большего угла отворота. Цель 4 является судном - сателлитом, и при повороте вправо не будет представлять опасности. ЛОД цели 3 при повороте вправо разворачивается в сторону нашего судна, и она будет являться потенциально опасной. Поэтому для радиолокационной прокладки выбираются цели 2 и 3. Прокладку цели 1 можно не вести, поскольку маневр расхождения с целью 2 в любом случае обеспечивает с ней безопасное расхождение; - определяются параметры ситуации сближения и элементы движения целей 2 и 3 из радиолокационной прокладки и выбирается маневр расхождения с опасной целью 2 (рис. 13.9); - проводится анализ радиолокационной прокладки. При выбранном маневре цель 3 становится опасной, и судоводителю приходится выбирать один из следующих возможных вариантов действия. Вариант 1. Проведение выбранного по результатам радиолокационной прокладки маневра расхождения. В этом случае цель 3 становится временно опасной и при возвращении к исходным параметрам движения в точке D 2 обеспечивается расхождение с целью 3 на безопасной дистанции. Вариант 2. Расчет нового маневра расхождения с целью 2 с меньшим углом отворота вправо. Это возможно при более раннем начале маневра. Тогда ОЛОД 3 возможно не пересечет опасную зону Dзад и цель 3 не станет опасной. Вариант 3. Расчет нового маневра расхождения с целью 3. При выборе второго варианта действия следует учитывать, что время, затраченное на расчет нового маневра расхождения, может не позволить начать его ранее, чем это определено в первом варианте. Третий из возможных вариантов потребует значительно большего угла отворота и поэтому связан с большими потерями времени на расхождение. Таким образом, в данной ситуации, учитывая, что второй вариант, так же как и первый, приводит только к временному ухудшению ситуации сближения с целью 3, видимо, целесообразно остановиться на первом варианте действий, поскольку существует довольно большой запас расстояния между собственным судном и целью 3 в момент возвращения к исходным параметрам движения.
Средства автоматической радиолокационной прокладки (САРП) - это радиолокационные информационно-вычислительные комплексы, обеспечивающие автоматизацию обработки радиолокационной информации и информации от гирокомпаса и лага. При работе с САРП судоводитель освобождается от операции ручного съема радиолокационных пеленгов и дистанций целей и их графической прокладки на радиолокационном планшете. Указанные операции выполняются в автоматическом режиме на экране индикатора. Это позволяет судоводителю уделять основное внимание вопросам наблюдения, оценки ситуации сближения, выбора и выполнения маневра для безопасного расхождения и контроля его эффективности. В то же время грамотное и полное использование возможностей САРП предполагает не абсолютное его предпочтение другим методам наблюдения и оценки опасности ситуации сближения, а совместное их применение и обязательный взаимный контроль. Необходимо отметить, что САРП является только датчиком необходимой для расхождения информации, а главная задача судоводителя при использовании САРП состоит в умении грамотно использовать эту информацию при принятии решения по безопасному расхождению. Такое умение грамотно использовать информацию должно быть основано на четком представлении о принципе работы, а, следовательно, функциональных возможностях и ограничениях САРП, а также погрешностях выдаваемой информации в различных ситуациях расхождения и внешних условиях плавания. В противном случае риск столкновения при использовании САРП для расхождения становится существенно выше, чем при ручной радиолокационной прокладке. В связи с этим каждый судоводитель должен пройти соответствующий курс обучения (включая тренажерную подготовку) по программам «Радиолокационное наблюдение и прокладка», «Использование САРП». Обучение судоводителей методам работы с САРП не должно сводиться к изучению только технической стороны вопроса. Освоение САРП как технического средства должно обеспечивать способность судоводителя квалифицированно осуществлять регулировку режимов работы применительно к преобладающим условиям и обстоятельствам плавания. В то же время особое внимание необходимо уделять вопросам анализа ситуации сближения на основе данных САРП и обоснования принимаемого решения по расхождению с учетом МППСС-72 и рекомендаций хорошей морской практики. Минимальные требования по обучению методам использования САРП сформулированы в Резолюции ИМО А.482(12) от 19 ноября 1981 г. Основные требования сводятся к тому, что судоводитель должен знать: - основные типы САРП и характеристики их индикаторов; - требования ИМО к технико-эксплуатационным характеристикам САРП; - факторы, влияющие на работу САРП и его точность; - возможности САРП и его ограничения, задержки в обработке радиолокационной информации; - правила включения и настройки индикаторов САРП; - правила использования предупредительной сигнализации, ее достоинства и недостатки; - правила проверки функционирования САРП; - принципы использования информации в режимах истинного и относительного движения, включая идентификацию опасных целей; - методику ручного и автоматического захвата целей, применение запретных зон в режиме автоматического захвата; - типовое графическое представление информации о цели и ее опасной зоне; - использование информации о прошлых положениях сопровождаемых объектов; - применение Международных правил предупреждения столкновений судов в море при выборе и проигрывании маневра расхождения. Функции САРП Прежде всего, любые САРП выполняют все функции РЛС по отображению на экране радиолокационной обстановки в соответствии с выбранной шкалой дальности и режимом ориентации изображения. Дополнительные, по сравнению с РЛС, функциональные возможности САРП обеспечивают выполнение следующих процедур: - автоматическое обнаружение эхо-сигналов надводных целей в пределах контролируемой зоны на экране САРП, границы которой задаются охранными кольцами, секторами захвата и линиями запрета захвата, отсекающими группы береговых объектов; - ручной или автоматический (по выбору судоводителя) захват целей на сопровождение (АС); - одновременное автоматическое сопровождение, обработка, отображение и непрерывное обновление данных не менее чем по 20-ти целям (сопровождаемые цели должны быть четко обозначены специальными маркерами); - непрерывное автоматическое определение пеленга и дистанции сопровождаемых целей и определение пеленга и дистанции эхо-сигнала любого нового объекта, появляющегося на экране САРП; - непрерывное автоматическое определение элементов движения (курса и скорости) и элементов сближения (дистанции и времени кратчайшего сближения) для всех сопровождаемых целей; тенденция движения цели должна определяться через 1 мин после начала АС, а вектор экстраполированного перемещения цели с заданной точностью - через 3 мин после начала АС; - непрерывное обновление на экране САРП вторичной радиолокационной информации, характеризующей элементы движения сопровождаемых целей и параметры ситуации сближения, в векторной или другой графической форме, четко указывающей экстраполированное перемещение целей; - дополнительное отображение на экране четырех разнесенных по времени через равные промежутки предыдущих положений сопровождаемых целей за период не менее 8 мин; - выдача на индикацию и непрерывное обновление буквенно-цифровой информации для любой сопровождаемой цели по выбору судоводителя; - возможность изменения длины вектора на экране САРП; - графическая имитация (проигрывание) маневра расхождения со всеми находящимися на автосопровождении целями, при условии, что элементы их движения останутся неизменными, а так же с учетом заданного времени начала маневра и инерционно-маневренных характеристик собственного судна (в течение всего времени имитации маневра обработка и отображение информации по всем сопровождаемым целям не должны прерываться); - обнаружение маневра цели и соответствующая корректировка выдаваемой информации (определение тенденции изменения относительного движения цели в течение 1 мин после завершения маневра, экстраполированное перемещение цели с заданной точностью в течение 3 мин после завершения маневра); - звуковая и световая предупредительная сигнализация об «опасных событиях», под которыми понимают появление новой и опасной цели (цель, вызвавшая предупредительный сигнал, должна отчетливо обозначаться на экране САРП); потеря цели, в том числе опасной (положение цели на момент потери должно отчетливо отображаться на экране САРП); начало маневра цели; сближение с целью на установленное предельное расстояние; неисправное функционирование САРП, выявившееся при автоматической тестовой проверке и т. д. Общие технико-эксплуатационные требования к САРП сформулированы в Резолюции ИМО А.422 (XI) от 15 ноября 1979 г. В числе этих требований отмечаются следующие: - судоводитель должен иметь возможность выбора шкал дальности, режима ориентации и стабилизации радиолокационного изображения, режима представления векторов (при этом должна быть обеспечена четкая индикация выбранного режима); - после изменения режима работы САРП (переключения шкалы дальности, ориентации, стабилизации, вида векторов), время восстановления всей информации о целях на экране САРП не должно превышать времени четырех оборотов антенны; - должна быть предусмотрена независимая регулировка яркости радиолокационного изображения и вторичной информации, вплоть до полного исключения последней; - информация САРП не должна маскировать радиолокационное изображение в такой степени, чтобы затруднялось обнаружение целей; - индикация данных САРП должна находиться под контролем судоводителя, должна быть предусмотрена возможность сброса ненужной информации в любой требуемый момент; - должна быть предусмотрена возможность включения и выключения предупредительной сигнализации судоводителем; - САРП не должно ухудшать характеристики сопрягаемых с ним датчиков навигационной информации (РЛС, гирокомпаса, лага), а сопряжение с другой аппаратурой не должно ухудшать характеристики самого САРП; - в САРП должны быть предусмотрены тестовые программы для периодической автоматической проверки работы САРП и сигнализация о неисправностях, позволяющая судоводителю контролировать правильность работы САРП.
§ 14.2. Основные ограничения САРП, которые необходимо учитывать при расхождении Поскольку САРП обеспечивает автоматическую обработку с помощью ЭВМ сигналов РЛС, то все ограничения радиолокатора входят как составная часть в ограничения САРП и их необходимо учитывать при расхождении. Это, прежде всего ограничения, накладываемые используемой шкалой дальности, возможность не обнаружить эхо-сигналы от малых судов, помехи радиолокационному обнаружению из-за состояния моря, дождя, тумана, теневые секторы и т.д. Алгоритмы обработки информации, реализованные в САРП, накладывают дополнительные ограничения. Основными из них являются следующие: - при автоматическом захвате целей на АС, особенно в сложных условиях плавания, на экране индикатора наряду с полезной информацией отображаются обработанные сигналы от помех, береговой черты, которые маскируют полезную информацию, приводят к переполнению каналов автосопровождения, когда общей число целей превышает число каналов для их обработки, и в общем случае затрудняют правильную оценку ситуации. В то же время ни одно из существующих САРП не обеспечивает гарантированного обнаружения и захвата на автосопровождение всех целей, в том числе и опасных. В ряде САРП при нахождении целей на одном пеленге очередная цель может быть захвачена на АС только после обработки и выдачи данных по ранее захваченной цели, т.е. существенно позже ее появления на экране. Поэтому использование САРП только в режиме автоматического захвата на АС нельзя рассматривать как надлежащее радиолокационное наблюдение; - при неустойчивом эхо-сигнале (малые суда, сопровождение в условиях помех) может произойти сброс цели с АС и информация по ней выдаваться не будет. При близком расхождении двух целей, когда пересекаются их стробы сопровождения, возможен срыв АС и потеря одной цели. В этом случае другая цель будет иметь два вектора, один из которых будет ложным. В некоторых случаях в таких ситуациях стробы сопровождения могут перебрасываются с одной цели на другую, что будет выглядеть на экране как внезапный маневр целей с дальнейшим их сбросом с АС; - сигналы РЛС, гирокомпаса и лага поступают в САРП с погрешностями. При бортовой качке судна, наличии помех, маневрировании и рыскании собственного судна, рыскании и качке цели погрешности датчиков увеличиваются. Поэтому при вычислении элементов движения цели и параметров ситуации сближения используется «сглаживание», т.е. получение осредненных значений сигналов за период 10 - 15 оборотов антенны. При этом предполагается, что цель движется прямолинейно и равномерно и каждый оборот антенны строб сопровождения перемещается в предвычисленное место по линии движения цели. Такая обработка обеспечивает более высокую (по сравнению с ручной радиолокационной прокладкой) точность вырабатываемых параметров, но приводит к задержке выдачи достоверных данных до трех минут с момента взятия цели на сопровождение; - погрешности вычисленных элементов движения цели и параметров ситуации сближения спустя три минуты с момента взятия цели на АС и ее движении постоянным курсом и скоростью могут достигать: истинный курс цели - ± 5° - 7°; истинная скорость цели - ± 1, 2 уз; дистанция кратчайшего сближения - ± 0, 7 мили; время кратчайшего сближения - ± 1 минута. - реализованные в САРП алгоритмы сглаживания, рассчитанные на прямолинейное и равномерное движение, приводят к тому, что маневр цели обнаруживается со значительным запозданием, а данные, выдаваемые САРП по маневрирующей цели, будут ненадежны с момента начала маневра до 3 - 4 мин после его окончания. Так, например, при уменьшении скорости цели на постоянном курсе погрешности в выдаваемом САРП курсе цели достигают 90° и более. При отсутствии визуального контакта использование такой информации может привести к неверной оценке ситуации и выбору ошибочного маневра. При «резких» маневрах курсом цель даже может выйти за пределы перемещающегося прямолинейно предвычисленного строба и сброситься с АС; - при маневрировании собственного судна выдаваемая САРП информация по всем сопровождаемым целям будет ненадежна. Возможно ложное маневрирование сопровождаемых целей - отклонение векторов целей от их первоначального положения, хотя фактически цели следуют постоянным курсом и скоростью. При резком маневре возможен сброс целей с АС. |
Последнее изменение этой страницы: 2019-06-08; Просмотров: 1253; Нарушение авторского права страницы
 Относительная прокладка - выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Относительная прокладка - выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике. После получения второго положения соединяют точки 1 и 2 линией, которая является ЛОД, и находят экстраполированное положение цели через 6 мин (положение 3). Для упрощения экстраполяции интервал времени между первым и вторым наблюдениями обычно составляет 3 мин. В противном случае для экстраполяции используется логарифмическая шкала, приведенная в правой части маневренного планшета.
После получения второго положения соединяют точки 1 и 2 линией, которая является ЛОД, и находят экстраполированное положение цели через 6 мин (положение 3). Для упрощения экстраполяции интервал времени между первым и вторым наблюдениями обычно составляет 3 мин. В противном случае для экстраполяции используется логарифмическая шкала, приведенная в правой части маневренного планшета. Погрешности определения параметров ситуации сближения. Одним из факторов, который следует учитывать при назначении заданной дистанции кратчайшего расхождения Dзад, является погрешность в определении Dкр. Она возникает из-за случайных и систематических погрешностей при радиолокационном определении относительного положения цели.
Погрешности определения параметров ситуации сближения. Одним из факторов, который следует учитывать при назначении заданной дистанции кратчайшего расхождения Dзад, является погрешность в определении Dкр. Она возникает из-за случайных и систематических погрешностей при радиолокационном определении относительного положения цели.
 Величина М на шкалах среднего масштаба, как правило, не превышает 1 кб.
Величина М на шкалах среднего масштаба, как правило, не превышает 1 кб. § 13.2. Выбор маневра расхождения с одним судном с использованием РЛС.
§ 13.2. Выбор маневра расхождения с одним судном с использованием РЛС. - выбирается время начала маневра расхождения и на ЛОД наносится точка М положения цели в момент начала маневра расхождения. Из намеченной точки проводится касательная к окружности радиусом Dзад, представляющая собой ожидаемую линию относительного движения после выполнения маневра (ОЛОД);
- выбирается время начала маневра расхождения и на ЛОД наносится точка М положения цели в момент начала маневра расхождения. Из намеченной точки проводится касательная к окружности радиусом Dзад, представляющая собой ожидаемую линию относительного движения после выполнения маневра (ОЛОД);  - ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной радиусу циркуляции - при углах отворота менее 90° и диаметру циркуляции - при больших углах отворота. Этот способ является основным в ситуациях обгона.
- ОЛОД из точки М проводится по касательной к окружности радиусом Dзад + D D. Величина D D принимается равной радиусу циркуляции - при углах отворота менее 90° и диаметру циркуляции - при больших углах отворота. Этот способ является основным в ситуациях обгона. Маневр скоростью. Отрезок ОС определяет новый вектор скорости, необходимый для расхождения на Dзад при мгновенном изменении скорости судна до нового значения в точке М положения цели в момент начала маневра. Для учета инерции при радиолокационной прокладке используются следующие способы:
Маневр скоростью. Отрезок ОС определяет новый вектор скорости, необходимый для расхождения на Dзад при мгновенном изменении скорости судна до нового значения в точке М положения цели в момент начала маневра. Для учета инерции при радиолокационной прокладке используются следующие способы:  аналогично маневру скоростью. Возвращение к исходным параметрам движения аналогично маневру курсом.
аналогично маневру скоростью. Возвращение к исходным параметрам движения аналогично маневру курсом.  Особенности радиолокационной прокладки в ситуации обгона. Главной особенностью является необходимость выходить на курс обгона заблаговременно до траверза обгоняемого судна. Для обгона выбирается участок пути, свободный от навигационных опасностей. По курсу обгоняемого судна не должно быть объектов, которые могли бы вызвать его поворот в сторону обгоняющего судна. В отличие от маневра в ситуации пересечения курсов, ОЛОД проводится не по касательной к Dзад, а с таким расчетом, чтобы угол a между ОЛОД и ЛОД был достаточно большим и маневр можно было уверенно обнаружить с обгоняемого судна (рис.13.6). В точке D пересечения ОЛОД с касательной к Dзад, параллельной ЛОД, возвращаются к исходным параметрам движения, т.е. заблаговременно выходят на курс обгона. Величина Dзад (траверзного расстояния между судами во время обгона) должна быть не менее 2 - 3 диаметров циркуляции своего судна.
Особенности радиолокационной прокладки в ситуации обгона. Главной особенностью является необходимость выходить на курс обгона заблаговременно до траверза обгоняемого судна. Для обгона выбирается участок пути, свободный от навигационных опасностей. По курсу обгоняемого судна не должно быть объектов, которые могли бы вызвать его поворот в сторону обгоняющего судна. В отличие от маневра в ситуации пересечения курсов, ОЛОД проводится не по касательной к Dзад, а с таким расчетом, чтобы угол a между ОЛОД и ЛОД был достаточно большим и маневр можно было уверенно обнаружить с обгоняемого судна (рис.13.6). В точке D пересечения ОЛОД с касательной к Dзад, параллельной ЛОД, возвращаются к исходным параметрам движения, т.е. заблаговременно выходят на курс обгона. Величина Dзад (траверзного расстояния между судами во время обгона) должна быть не менее 2 - 3 диаметров циркуляции своего судна.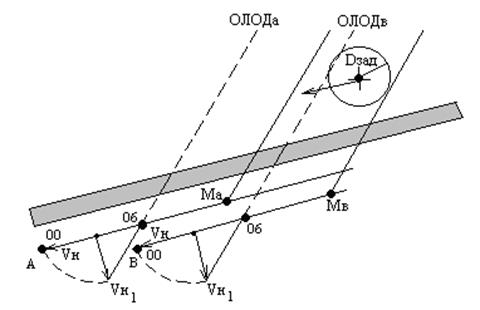 Особенности радиолокационного наблюдения и прокладки при плавании в системах разделения движения. Глазомерное радиолокационное наблюдение с использованием следов послесвечения позволяет ориентироваться в потоке движения судов следующим образом:
Особенности радиолокационного наблюдения и прокладки при плавании в системах разделения движения. Глазомерное радиолокационное наблюдение с использованием следов послесвечения позволяет ориентироваться в потоке движения судов следующим образом:  - для судов попутного потока - следы послесвечения отсутствуют. Появление следов свидетельствует о необходимости приведения скорости своего судна к средней скорости движения судов в потоке, как наиболее безопасной при движении судна в потоке;
- для судов попутного потока - следы послесвечения отсутствуют. Появление следов свидетельствует о необходимости приведения скорости своего судна к средней скорости движения судов в потоке, как наиболее безопасной при движении судна в потоке;  С учетом того, что пересекать полосу необходимо перпендикулярно направлению движения потока, в треугольнике скоростей вектор Vн разворачивают на 90° и проводят ОЛОД целей (пунктирные линии ОЛОДа и ОЛОДв). Затем параллельным перемещением полученных ОЛОД в направлении своего судна определяют положения целей (точки Ма и Мв) в момент начала маневра пересечения полосы движения. Таким образом, особенность радиолокационной прокладки в этом случае заключается в том, что, в отличие от обычного расхождения, выбирается не маневр, а по известному маневру находят безопасное время его выполнения.
С учетом того, что пересекать полосу необходимо перпендикулярно направлению движения потока, в треугольнике скоростей вектор Vн разворачивают на 90° и проводят ОЛОД целей (пунктирные линии ОЛОДа и ОЛОДв). Затем параллельным перемещением полученных ОЛОД в направлении своего судна определяют положения целей (точки Ма и Мв) в момент начала маневра пересечения полосы движения. Таким образом, особенность радиолокационной прокладки в этом случае заключается в том, что, в отличие от обычного расхождения, выбирается не маневр, а по известному маневру находят безопасное время его выполнения. 13.3. Особенности радиолокационной прокладки при расхождении с несколькими судами.
13.3. Особенности радиолокационной прокладки при расхождении с несколькими судами.