|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Маренков И.А., кандидат технических наук
Череповецкое высшее военное инженерное училище радиоэлектроники Российская Федерация, 162600 Вологодская обл., г. Череповец, Советский пр., 126 Сазонов К.В., доктор технических наук, доцент Военно-космическая академия имени А.Ф. Можайского Российская Федерация, 197198, г.Санкт-Петербург, ул. Ждановская, 13 Аннотация. Представлен усовершенствованный алгоритм определения местоположения источников радиоизлучений с борта беспилотного летательного аппарата. Особенностью разработанного алгоритма является учет крена, тангажа и рысканья при воздействии на беспилотный летательный аппарат метеорологических факторов, что позволяет повысить точность определения координат источников радиоизлучений. Приведены результаты исследования точностных возможностей алгоритма. Ключевые слова:беспилотный летательный аппарат, определение местоположения, крен, тангаж, рысканье, алгоритм.
настоящее время в мировой практике сложилась тенденция широкого использования беспилотных летательных аппаратов (БЛА) как в гражданских, так и в военных целях. Среди военных задач, решаемых с помощью БЛА, особое место занимают задачи поиска и обнаружения наземных объектов, в том числе с использованием комплексов радиомониторинга (РМ) [1]. Проведенный анализ информативных источников показал, что в большинстве научных и научно-исследовательских работ, посвященных повышению точности определения координат источников радиоизлучений (ИРИ) комплексами с БЛА, основные усилия направлены на разработку оптимальных траекторий движения и использование группы БЛА для решения поставленных задач [3]. С одной стороны, это позволяет оптимизировать геометрический фактор системы определения местоположения (ОМП) ИРИ и повысить точность координатометрии, с другой, требует привлечения дополнительных сил и средств и не всегда обеспечивает необходимый результат, так как на БЛА существенно влияют метеорологические условия, резкие изменения которых неизбежно приводят к снижению точности измерения координат ИРИ. В связи с этим разработан усовершенствованный алгоритм определения местоположения ИРИ с борта БЛА, позволяющий повысить точность измерения координат источников (рис. 1). Рисунок 1. Усовершенствованный алгоритм ОМП ИРИ с борта БЛА Достоинством усовершенствованного алгоритма является учет ориентации БЛА в пространстве за счет применения на борту гироскопа, позволяющего измерять текущие значения крена, тангажа и рысканья, возникающих вследствие воздействия на полет летательного аппарата метеорологических факторов, что не требует дополнительной стабилизации пеленгаторной антенной системы при определении направления на ИРИ [2]. Исходными данными алгоритма являются: высота полета h , маршрут полета М, допустимое значение среднеквадратической ошибки (СКО) ОМП ИРИ σтр. В блоках 2…5 происходит обнаружение источника, определение на него текущих значений азимута θ iи угла места β i с учетом крена Ki, тангажа Ti и рысканья Р i в соответствии с выражениями (1)…(3).
где
В блоке 6 осуществляется расчет текущих (xi;yi) и средневзвешенных координат ИРИ (X0;Y0) по формулам (4) и (5).
где
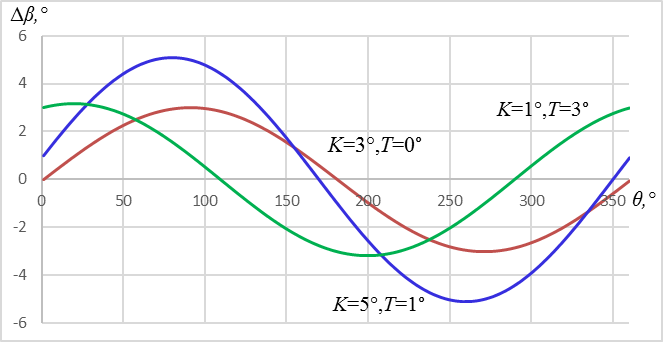
где В блоках 7…9 осуществляются расчет ошибки ОМП ИРИ σ i, выводятся текущие результаты ((X0;Y0),σi, Ri, θ i,β i), проверяется условие σ i ≤ σтр. Если значение ошибки ОМП ИРИ σ i превышает требуемое σтр, то в целях повышения точности ОМП источника БЛА меняет курс и осуществляет полет по азимуту θ i, что позволяет сократить расстояние до источника и уменьшить ошибку определения местоположения. После этого цикл, начиная с блока 3, повторяется до выполнения заданного в блоке 9 условия, и алгоритм прекращает работу. Возможности усовершенствованного алгоритма по точности ОМП ИРИ исследованы в результате имитационного моделирования. На рис. 2 представлены графики зависимости поправки по углу места Δβ от текущих значений азимута на ИРИ θ при различных значениях крена К и тангажа T.
Рисунок 2. Графики зависимости Δβ от θ при различных значениях К и T На рис. 3 представлены графики зависимости среднеквадратической ошибки определения местоположения ИРИ σ от времени t. Графики (рис. 3) построены для скорости полета БЛА w=25 м/с, удалении от ИРИ в начальный момент времени R1=30000 м, высоты полета h=3000 м, СКО измерения азимута σθ=3° и угла места 1 – облет ИРИ по окружности радиусом R1; 2 – полет по прямой без изменения курса БЛА; 3 – в соответствии с усовершенствованным алгоритмом.

Рисунок 3. Графики зависимости σ от tпри w=25 м/с, R1=30000 м, h=3000 м, σθ=3°, σβ =3°
В первой и второй моделях координаты ИРИ рассчитываются по результатам пеленгования в азимутальной плоскости (используется в существующих комплексах РМ с БЛА), в третьей модели – по результатам пеленгования в азимутальной и угломестной плоскостях. Анализ представленных на рисунках 2 и 3 графиков показал, что усовершенствованный алгоритм ОМП ИРИ с борта БЛА позволяет учесть поправку по углу места Δβ (рис. 2) за счет оценки текущей ориентации летательного аппарата в пространстве, и, как следствие, повысить точность определения координат ИРИ (рис. 3).
Литература 1. Боев С.Ф., Вагин А.И., Чеботарь И.В., Волков Р.А.Оценка координатно-информативных параметров MSK-сигналов пакетных радиосетейОВЧ - УВЧ-диапазонов с использованием алгоритма поиска совпадений. В сборнике: МИНЦЕВСКИЕ ЧТЕНИЯ труды Третьей Всероссийской научно-технической конференциимолодых конструкторов и инженеров, посвященной 70-летию Радиотехнического института имениакадемика А.Л. Минца и 70-летию ФИЗТЕХА. 2016. С. 149-159. 2. Зевин В.В., Иванов Р.В. Справочник оператора беспилотного летательного аппарата «Орлан». – СПб.: ООО «СТЦ», 2012. 3. Кукес И.С., Основы радиопеленгации. – Москва: «Советское радио», 1964. 4. Фетисов В. С., Адамовский В. В. Беспилотная авиация. – Уфа: «ФОТОН», 2014. 5. Чеботарь И.В., Печурин В.В., Балдычев М.Т., Гайчук Ю.Н., Шарапов И.О.Подход к определению координат разнотипных источников излучений группойлетательных аппаратов. В сборнике: МИНЦЕВСКИЕ ЧТЕНИЯ труды Третьей Всероссийской научно-технической конференциимолодых конструкторов и инженеров, посвященной 70-летию Радиотехнического института имениакадемика А.Л. Минца и 70-летию ФИЗТЕХА. 2016. С. 276-282. References 1. Boev S.F., Vagin A.I., Chebotar I.V., Volkov R.A. Coordinate information assessment MSK signal packets HF/VHF radiosystems with search compliance algorithm // Mintz reading, papers of III Scientific technical conference of young designers and engineers. 2016. p. 149-159. 2. Zevin V.V., Ivanov R.V. Handbook of unmanned aerial vehicle operator «Orlan». – SPb.: OOO 3. Kukes I.S., Basics of radio direction finding. – Moskow: «Soviet radio», 1964. 4. Fetisov VS, Adamovsky V. V. Unmanned aircraft. - Ufa.: «PHOTON», 2014. 5. Chebotar I.V., Pechurin V.V., Baldichev M.T.,Gaychuk Yu.N., Sharapov I.O.Approach to counting coordinates multitype radio sources by aerial vehicles group // Mintz reading, papers of III Scientific technical conference of young designers and engineers. 2016. p. 276-282.
|
Последнее изменение этой страницы: 2019-06-09; Просмотров: 307; Нарушение авторского права страницы
 (1)
(1) (2)
(2) (3)
(3) – текущий номер измерений;
– текущий номер измерений; – количество измерений;
– количество измерений;  ,
,  – измеренные значения азимута и угла места соответственно;
– измеренные значения азимута и угла места соответственно; – поправка по углу места, рассчитываемая по текущим значениям крена, тангажа и азимута на ИРИ.
– поправка по углу места, рассчитываемая по текущим значениям крена, тангажа и азимута на ИРИ. (4)
(4) (5)
(5) – весовой коэффициент;
– весовой коэффициент; – угол между линиями положения;
– угол между линиями положения; – СКО измерения линий положения по азимуту и углу места соответственно, вычисляемые по формулам (6) и (7).
– СКО измерения линий положения по азимуту и углу места соответственно, вычисляемые по формулам (6) и (7). (6)
(6) (7)
(7) – СКО измерения азимута и угла места соответственно;
– СКО измерения азимута и угла места соответственно; – наклонная дальность до ИРИ.
– наклонная дальность до ИРИ.