|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Нахождение начальной скорости, которая заставляет маятник
Совершать полные вращения
Предположим, что мы хотим с точностью до 0.001 найти наименьшее значение начальной скорости, которая требуется, чтобы заставить маятник, начинающий движение из своего исходного положения, выполнить полное вращение один раз. Будет полезно показать решения, которые соответствуют нескольким различным начальным скоростям на одном графике. Сначала мы рассмотрим целые значения скорости в промежутке от 5 до 10.
> > hold on > > for а = 5: 10 [t, xa] = ode45(g, [0: 0.01: 20], [0 а]); plot(xa(:, 1), xa(:, 2)) end > > hold off
Рис. 4.
Начальные скорости 5, 6 и 7 не являются достаточно большими (рис. 4), чтобы увеличить угол более π, но начальные скорости 8, 9 и 10 достаточны, чтобы заставить маятник совершать полный оборот. Посмотрим, что происходит на промежутке между 7 и 8.
Второй шаг
> > hold on > > for а = 7.0: 0.2: 8.0 [t, ха] = ode45(g, [0: 0.01: 20], [0 а]); plot(xa(:, 1), xa(:, 2)) end > > hold off
Рис. 5.
Можно заметить (рис. 6), что ответ находится где-то между 7.2 и 7.4. Давайте выполним еще одно уточнение.
Третий шаг
> > hold on > > for а = 7.2: 0.05: 7.4 [t, ха] = ode45(g, [0: 0.01: 20], [0 а]); plot(xa(:, 1), ха(:, 2)) end » hold off
Рис. 6.
Следует сделать вывод, что наименьшая необходимая скорость с точностью 0, 01 находится где-то между 7.25 и 7.3 (рис. 7 и 8).
Четвертый шаг
for a = 7.25: 0.01: 7.3 [t, xa] = ode45(g, [0: 0.01: 20], [0 a]); plot(xa(:, 1), xa(:, 2)) end
Рис. 7. Для более точного анализа увеличим область графика, где происходит смена режима колебания.
Рис. 8.
Видно, что наименьшая необходимая скорость находится где-то между 7.29 и 7.3. Следует продолжить нахождение более точного значения скорости смены режима колебания.
Динамика осциллятора Ван дер Поля при w2 = 2 и c = 1
Предельный цикл – устойчивый режим периодических колебаний в нелинейных системах после завершения переходных процессов
Файл-функция, для этих параметров, имеет следующий вид (см. Андреев 2013, с. 117):
function dydt = vdp1(t, y) dydt = zeros(2, 1); dydt(1) = y(2); dydt(2) = 1*(1-y(1).^2).*y(2)-2*y(1);
При начальном положении на предельном цикле (х0 = 2, v0= 0) вызов файл-функции имеет следующий вид:
[t, y] = ode23(@vdp1, [0 25], [2; 0]);
Следующий оператор дает возможность получить зависимость х и v от времени
plot(t, y(:, 1), t, y(:, 2)), grid on
Результат показан на рис. 1.
Рис. 1.
Следующий оператор дает возможность получить фазовый портрет системы (рис. 2):
plot(y(:, 1), y(:, 2)), grid on
Рис. 2.
Если взять начальные данные вне цикла (х0 = -0.5, v0= 5) вызов файл-функции имеет следующий вид:
[t, y] = ode23(@vdp1, [0 25], [-0.5; 5]);
Результат показан на рис. 3.
Рис. 3.
Фазовый портрет показан на рис. 4.
Рис. 4.
Если взять начальные данные внутри цикла (х0 = -0.05, v0= -0.05) вызов файл-функции имеет следующий вид:
[t, y] = ode23(@vdp1, [0 50], [-0.05; -0.05]);
Результат показан на рис. 5.
Рис. 5.
Фазовый портрет показан на рис. 6.
Рис. 6.
Система Ван дер Поля с периодическим возмущением
Файл-функция для этой системы при значениях A0 = 2 и W = 2 имеет следующий вид:
function dydt = vdp1s(t, y) dydt = zeros(2, 1); dydt(1) = y(2); dydt(2) = 1*(1-y(1).^2).*y(2)-2*y(1)+2*sin(2*t); Фазовый портрет показан на рис. 7.
Рис. 7.
Лабораторная работа № 6 – 7
Качественный анализ линейных ДС
ЦЕЛЬ РАБОТЫ
Рассмотрим линейную однородную систему с постоянными коэффициентами:
Координатную плоскость xOy называют ее фазовой плоскостью (ФП). Через любую точку плоскости проходит одна и только одна фазовая кривая ( траектория ) (ФТ). В системе (1) возможны три типа ФТ: · точка, · замкнутая кривая, · незамкнутая кривая. Точка на ФП соответствует стационарному решению (положению равновесия, точке покоя) системы (1), замкнутая кривая периодическому решению, а незамкнутая непериодическому.
Положения равновесия ДС
Положения равновесия системы (1) найдем, решая систему:
Система (1) имеет единственное нулевое положение равновесия, если определитель матрицы системы:
Если же det A = 0, то, кроме нулевого положения равновесия, есть и другие, так как в этом случае система (2) имеет бесконечное множество решений. Качественное поведение ФТ (тип положения равновесия) определяется собственными числами матрицы системы.
Классификация точек покоя
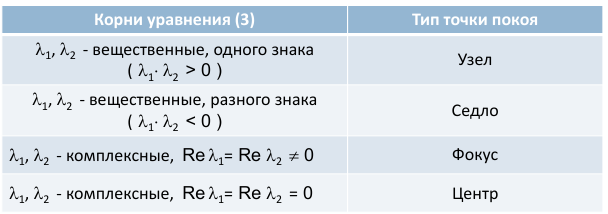
Собственные числа матрицы системы найдем, решая уравнение:
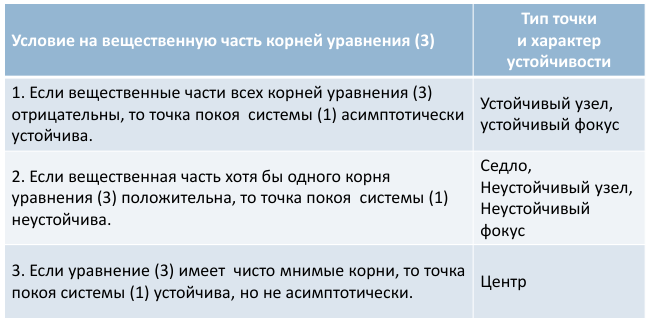
Заметим, что a + d = tr A (след матрицы) и ad bc = det A. Классификация точек покоя в случае, когда det A ≠ 0, приведена в таблице:
Устойчивость точек покоя
Собственные значения матрицы системы (1) однозначно определяют характер устойчивости положений равновесия:
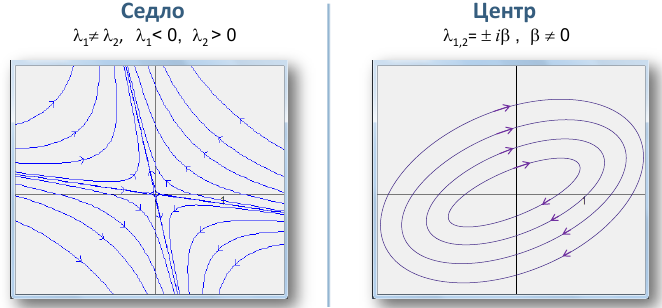
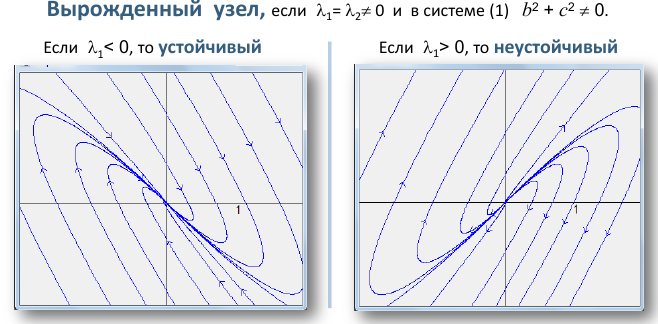
Фазовые портреты
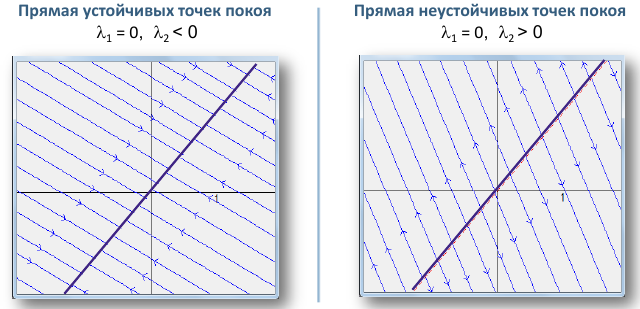
Бесконечное множество точек покоя
Если det A = 0, то система (1) имеет бесконечное множество положений равновесия. При этом возможны три случая:
Во втором случае любая точка покоя устойчива по Ляпунову. В первом же случае только, если l2 < 0.
Направление на фазовой кривой указывает направление движения фазовой точки по кривой при возрастании t.
Правила определения типа точки покоя
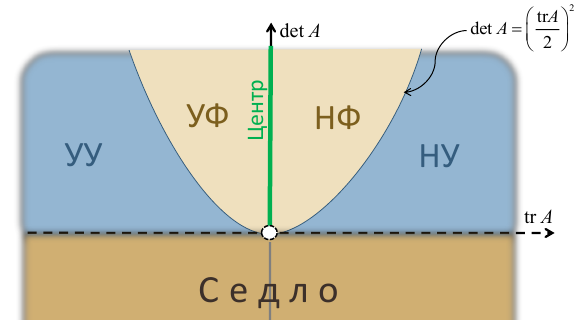
Можно определить тип точки покоя и характер ее устойчивости, не находя собственных значений матрицы системы (1), а зная только ее след tr A и определитель det A.
Бифуркационная диаграмма
Алгоритм построения фазового портрета ЛДС (1)
1.Определить положения равновесия, решив систему уравнений:
2. Найти собственные значения матрицы системы, решив характеристическое уравнение:
3. Определить тип точки покоя и сделать вывод об устойчивости. 4. Найти уравнения главных изоклин горизонтальной и вертикальной, и построить их на фазовой плоскости. 5. Если положение равновесия является седлом или узлом, найти те фазовые траектории, которые лежат на прямых, проходящих через начало координат. 6. Нарисовать фазовые траектории. 7. Определить направление движения по фазовым траекториям, указав его стрелками на фазовом портрете.
Главные изоклины
Заметим, что точка покоя на фазовой плоскости это пересечение главных изоклин. Вертикальную изоклину на фазовой плоскости будем помечать вертикальными штрихами, а горизонтальную горизонтальными.
Фазовые траектории
Если положение равновесия является седлом или узлом, то существуют фазовые траектории, которые лежат на прямых, проходящих через начало координат. Уравнения таких прямых можно искать в виде y = kx. Подставляя y = k x в уравнение:
для определения k получим:
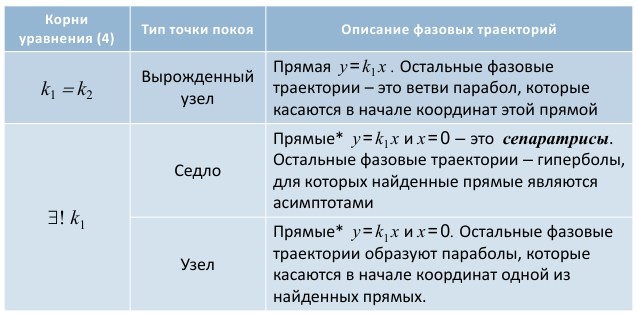
(Уравнения прямых, содержащих фазовые траектории, можно искать и в виде x = ky. Тогда для нахождения коэффициентов следует решить уравнение Дадим описание фазовых траекторий в зависимости от количества и кратности корней уравнения (4).
Фазовые траектории
* Если уравнения прямых ищутся в виде x = ky, тогда это будут прямые x= k1 y и y = 0.
Если положение равновесия является центром, то фазовые траектории являются эллипсами. Если положение равновесия является фокусом, то фазовые траектории являются спиралями. В случае, когда ЛДС имеет прямую точек покоя, то можно найти уравнения всех фазовых траекторий, решив уравнение:
Его первый интеграл ax + by = C и определяет семейство фазовых прямых.
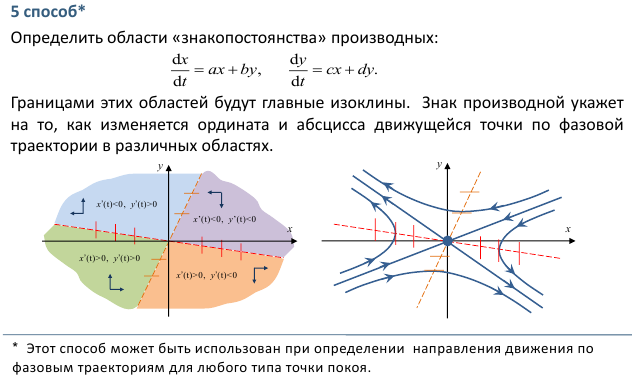
Направление движения
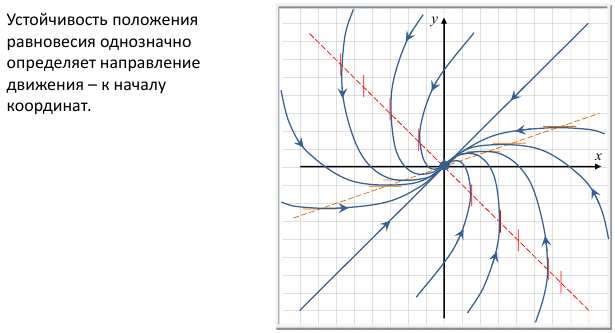
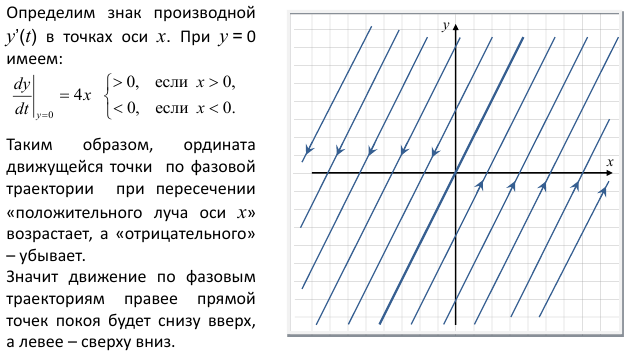
Если положение равновесия является узлом или фокусом, то направление движения по фазовым траекториям определяется однозначно его устойчивостью (к началу координат) или неустойчивостью (от начала координат). Правда, в случае фокуса требуется установить еще и направление закручивания (раскручивания), спирали по часовой или против часовой стрелки. Это можно сделать, например, так. Определить знак производной y’(t) в точках оси x.
Если положение равновесия является центром, то направление движения по фазовым траекториям (по часовой стрелке или против) можно определить так же, как устанавливается направление «закручивания (раскручивания)» траектории в случае фокуса.
Следовательно, если положение равновесия седло, то достаточно установить направление движения по какой-нибудь траектории. И далее можно однозначно установить направление движения по всем остальным траекториям.
Направление движения (седло)
Чтобы установить направление движения по фазовым траекториям в случае седла, можно воспользоваться одним из следующих способов: 1 способ Определить, какая из двух сепаратрис соответствует отрицательному собственному значению. Движение по ней происходит к точке покоя. 2 способ Определить, как изменяется абсцисса движущейся точки по любой из сепаратрис. Например, для y = k1x имеем:
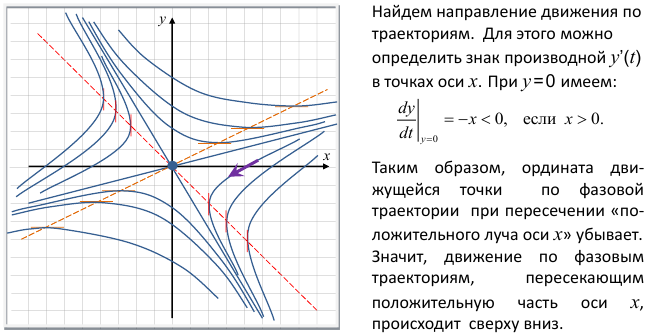
Если x(t) → 0 при t → +∞, то движение по сепаратрисе y = k1x происходит к точке покоя. Если x(t) → ±∞ при t→ +∞, то движение происходит от точки покоя. 3 способ Если ось x не является сепаратрисой, определить как изменяется ордината движущейся точки по фазовой траектории при пересечении оси x. Когда Если определять направление движение по фазовой траектории, пересекающей ось y, то лучше анализировать изменение абсциссы движущейся точки. 4 способ
Пример 1.
1. Система имеет единственное нулевое положение равновесия, так как det A = 6 ≠ 0. 2. Построив соответствующее характеристическое уравнение l2 6 = 0, найдем его корни l1, 2 = ± Ö 6. Корни вещественные и разного знака. Следовательно, положение равновесия седло. 3. Сепаратрисы седла ищем в виде y = kx.
4. Вертикальная изоклина: x + y = 0. Горизонтальная изоклина: x 2y = 0.
Пример 2.
1. Система имеет единственное нулевое положение равновесия, так как det A = 10 ≠ 0. 2. Построив соответствующее характеристическое уравнение l2 7l + 10 = 0, найдем его корни l1 = 2, l2 = 5. Следовательно, положение равновесия неустойчивый узел. 3. Прямые: y = kx.
4. Вертикальная изоклина: 2x + y = 0. Горизонтальная изоклина: x + 3y = 0.
Пример 3.
1. Система имеет единственное нулевое положение равновесия, так как det A = 18 ≠ 0. 2. Построив соответствующее характеристическое уравнение l2 + 3l + 18 = 0, найдем его дискриминант D = 63. Так как D < 0, то корни уравнения комплексные, причем Re l1, 2 = 3/2. Следовательно, положение равновесия устойчивый фокус. 3. Вертикальная изоклина: x + 4y = 0. Горизонтальная изоклина: 2x y = 0. Фазовые траектории являются спиралями, движение по которым происходит к началу координат. Направления «закручивания траекторий» можно определить следующим образом.
Пример 4.
1. Система имеет единственное нулевое положение равновесия, так как det A = 3 ≠ 0. 2. Построив соответствующее характеристическое уравнение l2+3 = 0, найдем его корни l1, 2 = ±iÖ 3. Следовательно, положение равновесия центр. 3. Вертикальная изоклина: x 4y = 0. Горизонтальная изоклина: x y = 0. Фазовые траектории системы эллипсы. Направление движения по ним можно установить, например, так.
Пример 5 (вырожденный узел)
1. Система имеет единственное нулевое положение равновесия, так как det A = 4 ¹ 0. 2. Построив соответствующее характеристическое уравнение l2 + 4l + 4 = 0, найдем его корни l1 = l2 = 2. Следовательно, положение равновесия неустойчивый вырожденный узел. 3. Прямая: y = kx.
4. Вертикальная изоклина: 2x + y = 0. Горизонтальная изоклина: x + 3y = 0.
Пример 6.
Так как определитель матрицы системы det A = 0, то система имеет бесконечно много положений равновесия. Все они лежат на прямой y = 2x. Построив соответствующее характеристическое уравнение l2 + 5l = 0, найдем его корни l1=0, l2=5. Следовательно, все положения равновесия устойчивы по Ляпунову. Построим уравнения остальных фазовых траекторий:
Таким образом, фазовые траектории лежат на прямых
Пример 7.
Так как определитель матрицы системы det A = 0, то система имеет бесконечно много положений равновесия. Все они лежат на прямой y = 2x. Так как и след матрицы системы trA=0, то корни характеристического уравнения l1 = l2 = 0. Следовательно, все положения равновесия неустойчивы. Построим уравнения остальных фазовых траекторий:
Таким образом, фазовые траектории лежат на прямых y = 2x + C, C " const, и параллельны прямой точек покоя. Установим направление движения по траекториям следующим образом.
Лабораторная работа № 8 – 9
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1727; Нарушение авторского права страницы



























 если x > 0, то ордината точки возрастает и, значит, движение по фазовым траекториям, пересекающим положительную часть оси x, происходит снизу вверх. Если же ордината убывает, то движение будет происходить сверху вниз.
если x > 0, то ордината точки возрастает и, значит, движение по фазовым траекториям, пересекающим положительную часть оси x, происходит снизу вверх. Если же ордината убывает, то движение будет происходить сверху вниз.