|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ В СРЕДЕ MATLAB ⇐ ПредыдущаяСтр 6 из 6
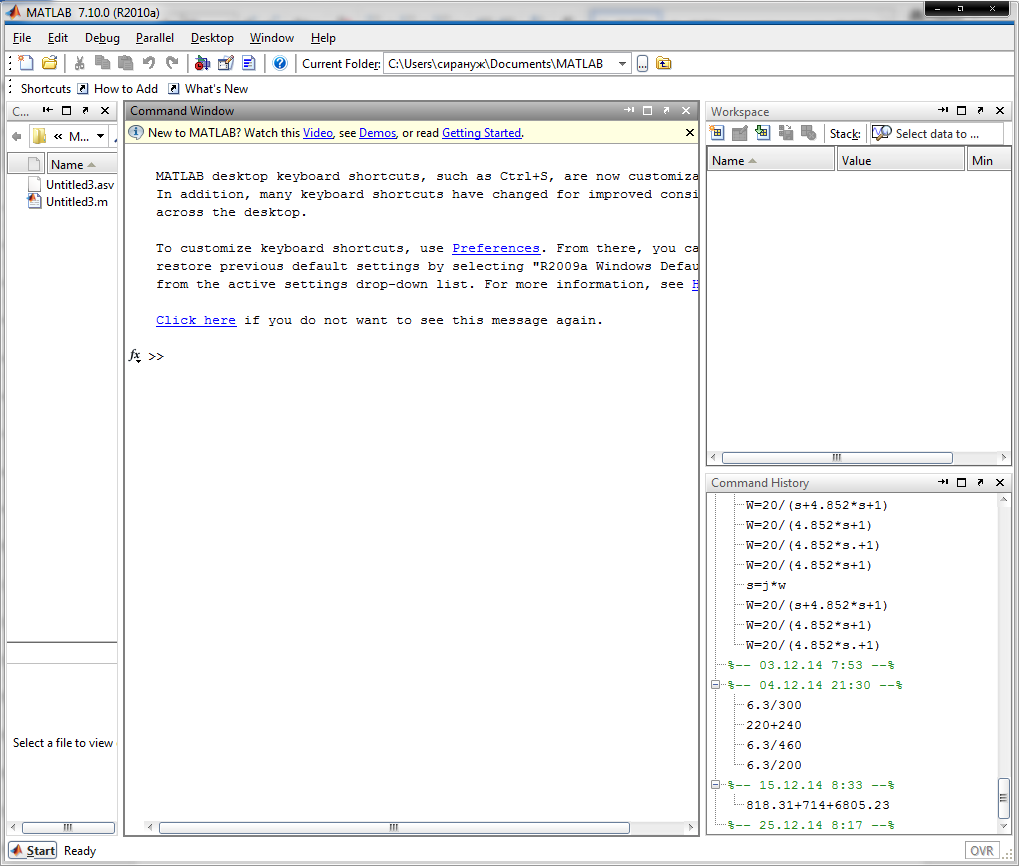
Для того, чтобы убедиться в правильности произведённых расчётов, необходимо осуществить имитационное моделирование динамических режимов работы САУ. Результаты моделирования позволят проконтролировать достижение заданных показателей качества управления. Для указанных целей рекомендуется пользоваться специальными математическими программами, такими как MatLab. MatLab – высокоуровневый интеллектуальный язык программирования, предназначенный для решения задач вычислительной математики. В состав пакета входит интерактивный командный интерфейс (интерпретатор MatLab). Интерпретатор MatLab запускается в отдельном окне при запуске программы из под Windows. При запуске пользователь переходит в окно интерпретатора (рисунок 7.1).
Рисунок - 7.1 Окно интерпретатора MatLab В окне интерпретатора пользователь может вводить как отдельные команды, так и группы команд. Окно редактирования программ MatLab вызывается из меню Create→ File→ New M-Script. Команды в окне «M-file» вводятся построчно. Если строка заканчивается символом «; », то результат выполнения команды не выводится в окне интерпретатора. Если же в конце строки символ «; » отсутствует, результат выполнения команды будет выводится в окне интерпретатора. В конце строки после набора всех команд возможно оставить комментарий. Комментарий отдаляется от команды знаком «%» (процент). Текст стоящий после знака «%» интерпретатором не обрабатывается. В MatLab предусмотрено два режима набора команд: 1. Терминальный (команды вводятся и выполняются в окне интерпретатора последовательно); 2. Программный (команды вводятся в текстовом режиме в виде программы). В окне терминального режима после загрузки MatLab появится знак приглашения к работе > >. Ввод команд производят с клавиатуры. Нажав клавишу Enter, подают знак системе на выполнение команды и в терминальном окне появится результат выполнения команды. Клавишами ↑ и ↓ возвращают ранее введённые команды или другую информацию. В переменной ans хранится результат последней операции, если команда не содержит знака препинания. Следует помнить, что значение переменной ans изменяется после каждого вызова команды без операции присваивания. Программный режим сохраняет введённую последовательность команд в виде файла и позволяет повторить их выполнение в других сеансах работы. Программный режим вызывается командой Create→ File→ New M-Script. Рассмотрим пример работы в программном режиме. Введём в текстовом окне редактирования следующую программу: k=2; T1=0.12; T2=0.624; %Ввод коэффициента передачи и постоянных времени. h=tf([k], [T1, T2, 1]); %Ввод передаточной функции. figure(1) %Вызов графического окна для построения хар-к №1. step(h), grid on %Команда построения переходной характеристики. figure(2) %Вызов графического окна для построения хар-к №2. impulse(h), grid on %Построение импульсной передаточной функции. figure(3) %Вызов графического окна для построения хар-к №3. bode(h), grid on %Построение ЛАЧХ и ЛФЧХ. figure(4) %Вызов графического окна для построения хар-к №4. nyquist(h), grid on %Построение АФХ.
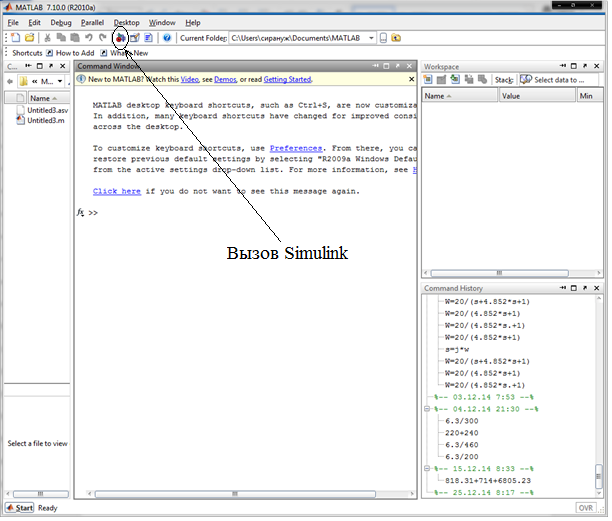
Результатом работы программы является построение временных и частотных характеристик заданной передаточной функции. В Matlab предусмотрен графический режим анализа систем автоматики в приложении Simulink. Simulink можно вызвать нажав на соответствующую иконку панели инструментов (рисунок 7.2)
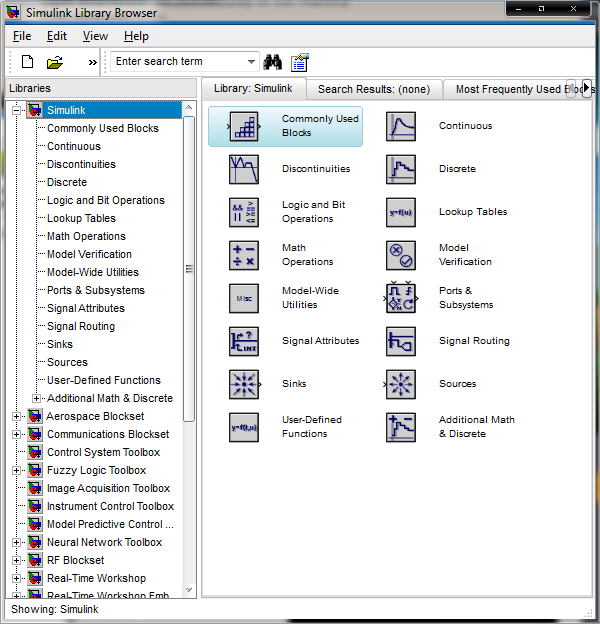
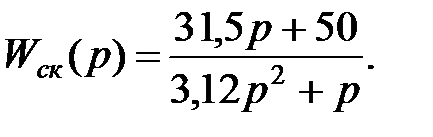
Рисунок 7.2 – Вызов Simulink на панели инструментов Появится окно библиотек элементов Simulink Library Browser (рисунок 7.3). Для моделирования линейных систем понадобятся следующие библиотеки: Continuous, Math Operations, Sinks, Sources. В библиотеке Continuous содержаться элементы типовых динамических звеньев. В библиотеке Math Operations – элементы, которые выполняют прописанные математические операции. В библиотеке Sinks блоки на экране которых можно наблюдать результаты математического анализа. В библиотеке Sources блоки, задающие типы входных сигналов. Рассмотрим анализ линейной непрерывной системы из раздела 5 пособия. Пусть задана передаточная функция скорректированной системы в разомкнутом состоянии
Рисунок 7.3 – Библиотека элементов Simulink Представим передаточную функцию в виде полиномов в числителе и знаменателе. В результате преобразования получим следующую передаточную функцию
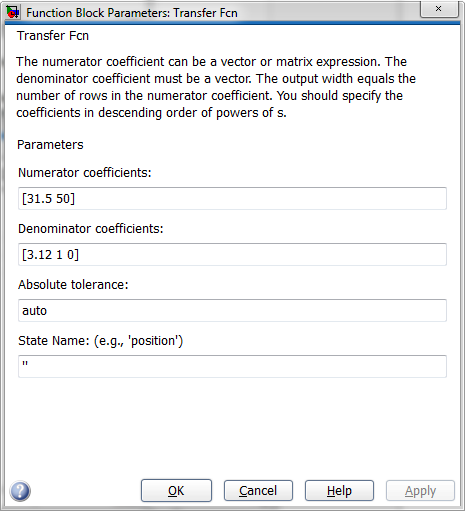
На панели инструментов Simulink Library Browser выберем команду File→ New→ Model. Появится окно графического моделирования (рисунок 7.4). На панели инструментов следует обратить внимание на иконки запуска и останова моделирования заданной САУ и окна в котором задаётся время моделирования (рисунок 7.4). В разделе Continuous библиотеки элементов выберем блок Transfer Fcn и перетащим его в графическое окно. В блоке Transfer Fcn введём коэффициенты полиномов передаточной функции разомкнутой скорректированной системы (рисунок 7.5). В разделе библиотеки элементов Math Operations для ввода структурной схемы выберем блоки Sum (сумматор) и Gain (усилитель). В окне ввода параметров блока Gain введём коэффициент передачи
Рисунок 7.4 – Окно ввода структурной схемы
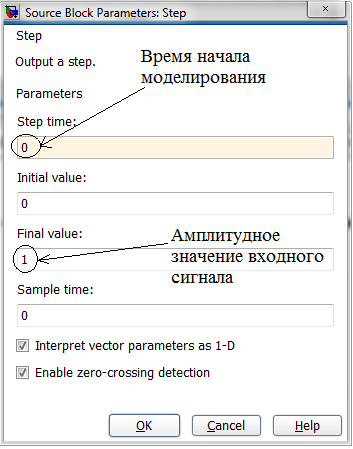
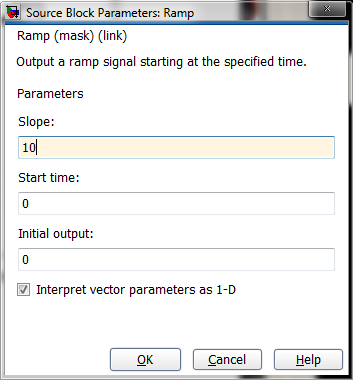
Рисунок 7.5 – Окно в котором задаются параметры блока Transfer Fcn В разделе библиотеки элементов Sources зададим типовые входные сигналы блоками Step и Ramp. Блок Step позволяет задать единичный входной сигнал, а блок Ramp - входной сигнал, изменяющейся с постоянной скоростью. В окне параметров блока Step зададим параметры единичного входного сигнала (рисунок 7.6). В окне параметров блока Ramp зададим параметры входного сигнала (движение с постоянной скоростью) v=10 м/с (рисунок 7.7).
Рисунок 7.6 – Окно в котором задаются параметры единичного входного сигнала В результате выполнения вышеперечисленных действий в графическом окне будет введена структурно – динамическая система скорректированной САУ (рисунок 7.8). В результате выполнения моделирования получим графики переходных процессов при подаче на вход замкнутой скорректированной САУ типовых входных сигналов: единичного ступенчатого сигнала и входного сигнала движения с постоянной скоростью (рисунок 7.9). Для построения частотных характеристик разомкнутой скорректированной САУ разомкнём цепь обратной связи. Правой клавишей мыши щёлкнем на выходе блока (линия связи), который задаёт вид входного сигнала и в появившемся окне команд выберем Linearization Points→ Input Points. Правой клавишей мыши щёлкнем на входе блока Scope (линия связи) и в появившемся окне команд выберем Linearization Points→ Outrut Points.
Рисунок 7.7 – Окно параметров входного сигнала (движение с постоянной скоростью) v=10 м/с Рисунок 7.8 – Модель скорректированной замкнутой САУ
Рисунок 7.9 – Графики переходных процессов В окне команд ввода модели выберем следующий пункт Tools→ Control Desing→ Linear Analysis… Появится окно Control and Estimation Tools Manager. В появившемся окне выберем Linearize Model, тем самым вызвав окно приложения Lti Viewer. Поставим галочку напротив команды Plot linear analysis result in a и выберем в ниспадающем окне команды Bode response plot (ЛАЧХ и ЛФЧХ), Nyquist plot (амплитудо – фазовая характеристика АФХ). Нажав на кнопку Linearize Model получим ЛАЧХ и ЛФЧХ, АФХ разомкнутой скорректированной САУ соответственно. ПОЯСНИТЕЛЬНАЯ ЗАПИСКА СОДЕРЖИТ: Введение. В этой части необходимо описать методы частотной коррекции, используемой для улучшения качественных показателей САУ. 1. Основной раздел. Этот раздел включает в себя описание всех этапов синтеза корректирующего устройства и графики логарифмических частотных характеристик, выполненные на миллиметровой бумаге. 2. Моделирование САУ на ЭВМ. В этом разделе приводятся схемы моделирования, графики переходных процессов, графики частотных характеристик и результаты сравнительного анализа построений. 3. Выводы. Литература.
ГРАФИЧЕСКАЯ ЧАСТЬ СОДЕРЖИТ: 1. Функциональную схему САУ электроприводом постоянного тока. 2. Логарифмические амплитудно-частотные и фазочастотные характеристики всех этапов синтеза САУ. 3. Кривые переходных процессов, полученные при подаче на вход сигналов 4. Логарифмические частотные характеристики разомкнутой и замкнутой систем, полученные при помощи ЭВМ. Вся графическая часть выполняется на отдельном листе формата А1, разделенном на четыре формата A3.
Рисунок П.1.1 - К определению частоты среза
Рисунок П.1.2 - К определению запасов устойчивости
Таблица П.2.2 - Активные корректирующие устройства Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2253; Нарушение авторского права страницы

 . В разделе библиотеки элементов Sinks выберем блок Scope, который позволит наблюдать кривую переходных процессов.
. В разделе библиотеки элементов Sinks выберем блок Scope, который позволит наблюдать кривую переходных процессов.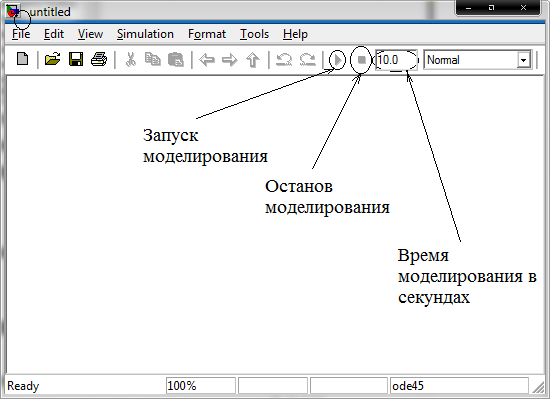

 и
и  , и годограф комплексного коэффициента передачи.
, и годограф комплексного коэффициента передачи.


 , где
, где
 ;
;  При
При  имеем
имеем  ;
; 
 , где
, где
 ;
; 
 , где
, где
 ;
;  ;
; 
 , где
, где
 ;
; 
 , где
, где
 ;
;  ;
; 
 , где
, где
 ;
;  ;
; 

 , где
, где
 ;
;  ;
при
;
при  имеем
имеем  ,
, 
 , где
, где
 ;
;  ;
;  при
при  ;
;  ;
;  имеем
имеем  ;
; 
 где
где
 ;
;  ;
при
;
при  имеем
имеем  ,
, 


 , где
, где
 ;
;  ;
;  при
при  ; имеем
; имеем  ;
;