
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ЧАСТОТНАЯ КОРРЕКЦИЯ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯСтр 1 из 6Следующая ⇒
МИНОБРНАУКИ РОССИИ Государственное образовательное учреждение высшего профессионального образования «Ухтинский государственный технический университет» З.Х. Ягубов, С.В. Полетаев ЧАСТОТНАЯ КОРРЕКЦИЯ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (Элементы синтеза и курсовое проектирование) Методические указания к курсовому проектированию Ухта 2014
ББК 32.965 Я 38 УДК 681.5.08 (085)
Ягубов З.Х, Полетаев С.В. Частотная коррекция линейных систем автоматического управления: Учебное пособие. - Ухта: УГТУ, 2014. - 79 с., ил.
JSBN 5-88179-082-0
Учебное пособие предназначены для студентов специальности направления бакалавриата 140400 " Электроэнегертика и электротехника". Излагаются методы коррекции линейных систем автоматического управления, даются примеры расчета. Приводится задание на курсовую работу.
Методические указания рассмотрены и одобрены кафедрой ЭАТП и пр. № 9 от 20.11.2014 г. и рекомендованы к изданию советом специальности 140400.
Рецензент Тетеревлёва Е.В. Редактор Старцев А.Э.
В методических указаниях учтены предложения рецензента и редактора.
План 2014г., позиция 76 Подписано в печать 22.12.14. Компьютерный набор. Объем 79 с. Тираж 50 экз. Заказ № 226.
СОДЕРЖАНИЕ ВВЕДЕНИЕ. 4 1. БАЗОВЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 5 2. КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.. 20 3. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ПО ЛОГАРИФМИЧЕСКИМ ЧАСТОТНЫМ ХАРАКТЕРИСТИКАМ.. 23 4. ТИПЫ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ И ОСОБЕННОСТИ ИХ ПОСТРОЕНИЯ.. 33 5. ПРИМЕР СИНТЕЗА ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА.. 40 6. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ ПО ДИСЦИПЛИНЕ " ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ". 53 7. ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ В СРЕДЕ MATLAB.. 54 ЛИТЕРАТУРА.. 79
ВВЕДЕНИЕ
В теории систем автоматического управления (САУ) синтезом называют технически обусловленное математическое обоснование структуры системы (структурный синтез) и определение ее оптимальных параметров (параметрический синтез). Решение общей задачи синтеза систем автоматического управления (САУ) часто встречается со значительными трудностями. Во-первых, результат решения может быть отрицателен, т.е. система с заданными показателями качества может оказаться физически нереализуемой. Во-вторых, могут быть получены такие параметры системы, которые невозможно осуществить технически. Наконец, в-третьих, задача синтеза может иметь неоднозначный ответ, т.е. решение задачи имеет несколько альтернативных вариантов. В связи с этим имеет смысл рассматривать более частную задачу синтеза - коррекцию динамических и статических свойств системы автоматического управления. Эта задача заключается в следующем. Имеется исходная система автоматического управления с известными параметрами основных функциональных элементов. Эти параметры выбираются при проектировании системы, исходя из конкретных условий технической эксплуатации рассматриваемой системы. Требуется определить передаточные функции, схемы и параметры корректирующих устройств, обеспечивающих нужные показатели качества процесса регулирования. Обычно используют два способа задания качественных показателей. При первом способе задается область, внутри которой должны располагаться фактические показатели качества. Системы, построенные в соответствии с этим способом, называют системами со стабилизируемыми показателями качества [1, 2]. Их примером служат системы, в которых обеспечивается значение показателя качества не хуже заданного. При втором способе показатель качества задается в виде функционала, а корректирующие цепи выбирают так, чтобы при заданных воздействиях и ограничениях обеспечивался экстремум этого функционала. Системы, построенные этим способом, называются системами с оптимизацией показателя качества. Их примером служат системы с минимальной квадратичной интегральной оценкой [1]. В инженерной практике более широкое применение нашел первый способ. Это связано с более наглядной физической интерпретацией, как самой постановки задачи, так и основных этапов решения. Поэтому материал настоящего пособия ориентирован именно на такой подход. ПРИМЕР СИНТЕЗА ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА
Произведем синтез последовательного корректирующего устройства для простейшей одноконтурной системы управления электроприводом постоянного тока. Структурная схема такой САУ представлена на рисунке 5.1.
Входным сигналом x(p) в данном случае будет управляющее напряжение, а выходным сигналом y(p)(илирегулируемым параметром) - скорость вращения вала двигателя ω . На рисунке 5.1 приняты следующие обозначения:
Необходимо синтезировать корректирующее устройство последовательного типа, обеспечивающее необходимые показатели качества, при следующем задании:
В результате синтеза необходимо получить следующие показатели качества: - при изменении управляющего напряжения с постоянной скоростью, равной 10 В/с скоростная ошибка системы не должна превышать 0, 2 В, т.е. - перерегулирование при номинальном ступенчатом воздействии на входе не должно превышать величины - время регулирования при аналогичном воздействии не должно превышать значения Производим синтез корректирующего устройства в следующей последовательности: I. Конкретизируем передаточную функцию двигателя. Для этого определим значения коэффициента усиления 1. Вычислим номинальную угловую скорость вращения вала двигателя:
2. Определим конструктивную постоянную двигателя:
Для более точных расчетов в ряде случаев используют два значения постоянных двигателя: постоянную по моменту
где
Следует отметить, что теоретически в системе СИ 3. Определим искомые параметры
или, используя значения постоянных
Для рассматриваемого примера воспользуемся упрощенными формулами и определим
Теперь передаточные функции всех элементов нескорректированной системы управления полностью определены. II. Приведем заданную структурную схему САУ к структуре с единичной обратной связью. Это необходимо сделать в связи с тем, что все теоретические сведения, изложенные в главе 3, справедливы для САУ с единичной обратной связью. После преобразования получим структурную схему, изображенную на рисунке 5.2. Рисунок 5.2 - Структурная схема САУ двигателем постоянного тока, приведенная к единичной обратной связи В дальнейшем будем рассматривать замкнутую систему без учета звена с передаточной функцией
Для рассматриваемого примера
III. Определим требуемый коэффициент усиления разомкнутой системы, при котором
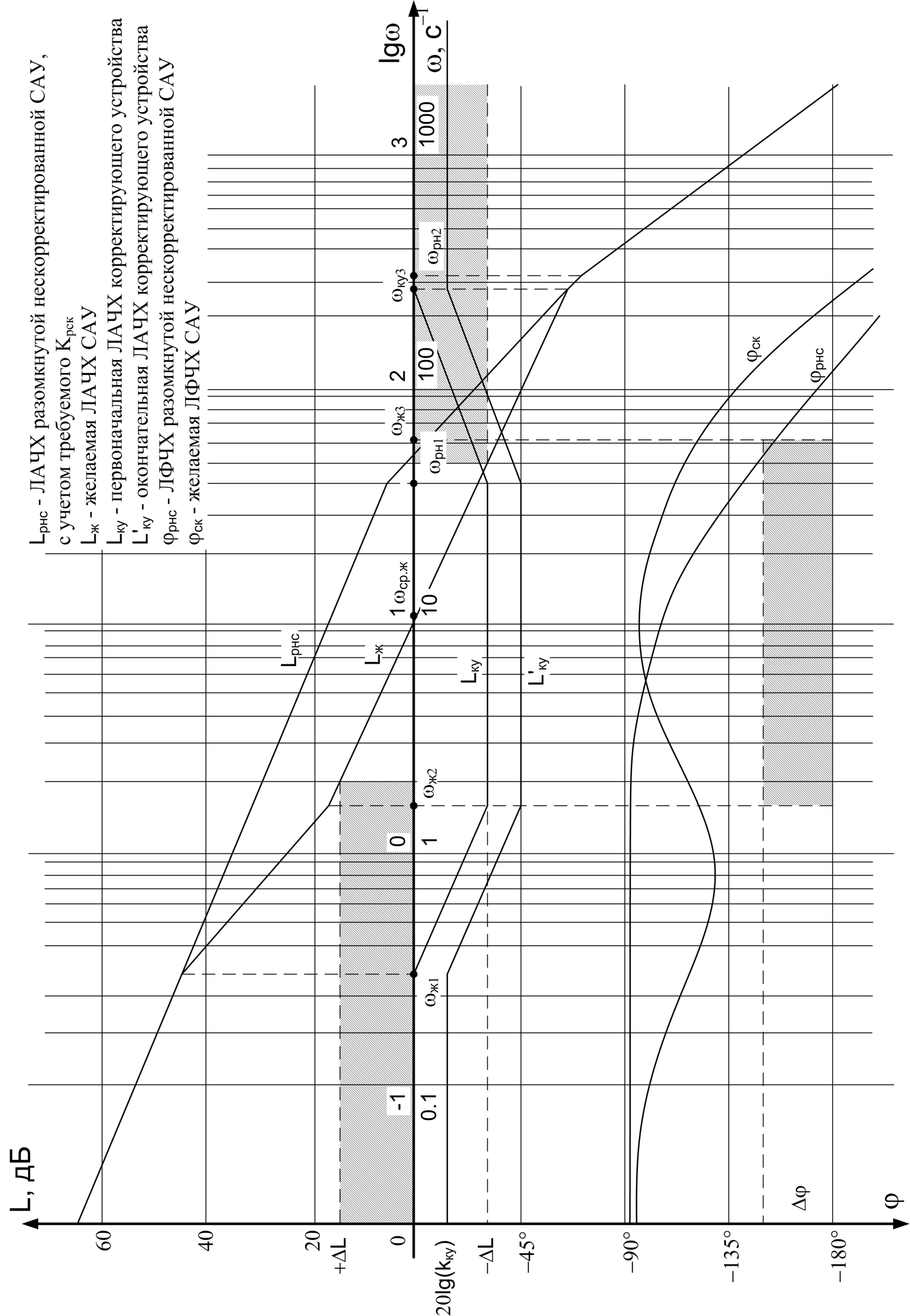
IV. Строим ЛАЧХ разомкнутой нескорректированной системы
и частоты перегиба
Откладываем при ЛАЧХ исходной нескорректированной системы V. По логарифмическому критерию устойчивости оцениваем устойчивость исходной нескорректированной системы. Для этого по найденной передаточной функции разомкнутой САУ (5.7) строим ЛФЧХ системы
По результатам построений, показанным на рисунке 5.3, можно сделать вывод что система устойчива, т.к. линия VI. Теперь для выбора корректирующего устройства, обеспечивающего заданные динамические свойства системы, строим желаемую ЛАЧХ 1. Определяем параметр Проверяем правильность выбранного нами значения
Получаем значение перерегулирования, соответствующее заданному 2. Определяем частоту положительности
3. Выбираем частоту среза желаемой ЛАЧХ по найденному значению
Выбираем частоту среза
4. Наносим 5. Для определения граничных частот среднечастотной асимптоты строим области запрета для ЛАЧХ и ЛФЧХ системы. Для этого находим по графику зависимости запасов устойчивости по амплитуде и фазе от величины перерегулирования
На этом построение среднечастотной асимптоты заканчиваем. 6. За низкочастотную асимптоту желаемой ЛАЧХ принимаем низкочастотную асимптоту нескорректированной системы с требуемым коэффициентом усиления 7. Производим сопряжение построенных участков желаемой ЛАЧХ следующим образом: сопрягаем низкочастотную асимптоту со среднечастотной прямолинейным отрезком с наклоном -40 дБ/дек; среднечастотную с высокочастотной - отрезком с наклоном -20 дБ/дек. 8. После формирования желаемой ЛАЧХ
где
Фазочастотная характеристика желаемой системы имеет вид
Подсчитываем запас устойчивости по фазе в точке
Находим запас устойчивости в точке
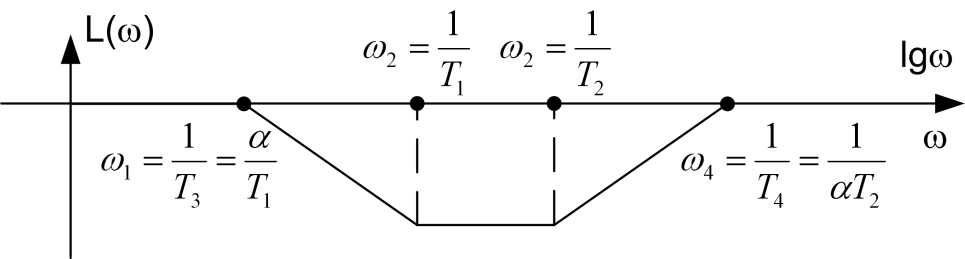
Так как запас устойчивости по фазе в граничных точках получился не меньше заданного ( VII. Определяем требуемую передаточную функцию корректирующего устройства и его электрическую схему. 1. Определяем ЛАЧХ корректирующего устройства, которая получается вычитанием ординат ЛАЧХ нескорректированной системы из ординат желаемой ЛАЧХ (3.3). Полученная ЛАЧХ корректирующего устройства
ЛАЧХ требуемого корректирующего устройства 2. По полученной ЛАЧХ корректирующего устройства восстанавливаем его передаточную функцию
где
3. Так как корректирующее устройство должно уменьшать коэффициент усиления разомкнутой системы, то для его схемной реализации можно выбрать пассивное корректирующее устройство из таблицы П.2.1. Так как требуемая ЛАЧХ в таблице отсутствует, то выбираем близкую к ней ЛАЧХ инерционно-форсирующего звена (рисунок 5.5).
Рисунок 5.4 - К выбору корректирующего устройства Передаточная функция звена
где Фазочастотная характеристика
Рисунок 5.5 - Принципиальная электрическая схема и ЛАЧХ инерционно-форсирующего звена Очевидно, что требуемая передаточная функция корректирующего устройства может быть получена из табличной путем умножения на постоянный коэффициент При соединении делителя напряжения с корректирующим звеном необходимо следить затем, чтобы нижнее плечо делителя ( 4. Определяем величины сопротивлений резисторов и емкостей конденсаторов, входящих в электрическую схему корректирующего устройства.
Рисунок 5.6 - Принципиальная электрическая схема корректирующего устройства Выражая постоянные времени полученного нами корректирующего устройства через номиналы резисторов и конденсаторов, можно составить систему уравнений для определения этих величии
Так как имеется четыре неизвестных параметра и три уравнения связи между ними, то для определения номиналов резисторов и конденсаторов зададимся значением одного из них. Примем
Для практического исполнения корректирующей цепи выбираем из стандартного ряда (см. приложение 4) следующие номинальные значения:
Для определения номиналов резисторов делителя напряжения
Выберем
Для практического исполнения делителя принимаем в соответствии со стандартным рядом VIII. Строим логарифмическую фазочастотную характеристику скорректированной системы. Для этого определяем выражение для ЛФЧХ системы
Учитывая, что
Результаты построений приведены на рисунке 5.3. Из анализа логарифмической амплитудно-частотной и фазочастотной характеристик разомкнутой скорректированной системы (рисунок 5.3) можно сделать вывод, что соответствующая замкнутая система устойчива и обладает запасами устойчивости по амплитуде IX. Записываем передаточную функцию скорректированной системы в разомкнутом состоянии
Учитывая, что Тсп< < Тку1и
X. Определяем передаточную функцию скорректированной системы управления в замкнутом состоянии
На этом синтез САУ электроприводом постоянного тока заканчивается. 6. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ ПО ДИСЦИПЛИНЕ " ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ" 1. Произвести синтез последовательного корректирующего устройства по логарифмическим частотным характеристикам для обеспечения заданных показателей качества системы автоматического управления электроприводом постоянного тока (рисунок 5.1). 2. Рассчитать кривые переходных процессов в скорректированной системе при поступлении на вход сигналов 3. Произвести оценку показателей качества переходных процессов и сравнить их с заданными. 4. Построить годограф комплексного коэффициента передачи и логарифмические частотные характеристики скорректированной системы с использованием программы «MatLab». 5. Сравнить результаты построений " вручную" и на ЭВМ. Вариант задания для выполнения курсовой работы выбирается из таблицы в приложении 3 по двум последним цифрам зачётки. Для вариантов, где регулируемым параметром является скорость вращения вала двигателя ЛИТЕРАТУРА
1. Бесекерский В А, Попов Е.П. Теория систем автоматического регулирования.-М.: Наука, 2010.-768 с. 2. Воронов А. А. Основы теории автоматического управления: Автоматическое регулирование непрерывных линейных систем.-М.: Энергия, 1980.- 312 с. 3. Теория автоматического управления. Ч.1/Под ред. А.В. Нетушила.-М.: Высш. школа, 1967.-424 с. 4. Зайцев Г.Ф. Теория автоматического управления и регулирования.-Киев: Высш. школа, 1975.-424 с. 5. Справочное пособие по теории систем автоматического регулирования и управления/ Под ред. Е.А. Санковского.-Мн.: Высш. школа, 1973.- 584 с. 6. Перепелкин С.Р. Расчет следящих систем (частотный метод).-Харьков: Высш. школа, 1978, -124 с. 7. Беседы по автоматике/Под ред. П.И. Чинаева.-Киев: Техника, 1971.- 232 с. 8. Расчет автоматических систем/ Под ред. А.В. Фатеева.-М.: Высш. школа, 1973.-336 с. 9. Солодовников В.В., Дмитриев А.Н., Егунов Н.Д. Спектральные методы расчета и проектирования систем управления.-М.: Машиностроение, 1986. -440 с. 10. Коновалов Л.И., Петелин Д.П. Элементы и системы электроавтоматики: Учеб. пособие для студентов вузов.-М.: Высш. школа, 1980.-392 с. 11. Танатар А.И. Элементы промышленной автоматики и их динамические свойства.-Киев: Техника, 1975.-232 с. 12. Александров К, К., Кузьмина Е.Г. Электротехнические чертежи и схемы. - М.: Энергоатомиздат, 1990. -288 с. 13. Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство.-Пер. с нем.-М.: Мир, 1982.-512 с., ил. 14. Усатенко С.Т., КаченюкТ.К., Терехова М.В. Выполнение электрических схем по ЕСКД: Справочник.-М: Издательство стандартов, 1989.-325
МИНОБРНАУКИ РОССИИ Государственное образовательное учреждение высшего профессионального образования «Ухтинский государственный технический университет» З.Х. Ягубов, С.В. Полетаев ЧАСТОТНАЯ КОРРЕКЦИЯ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (Элементы синтеза и курсовое проектирование) Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1639; Нарушение авторского права страницы
 - передаточная функция регулятора скорости;
- передаточная функция регулятора скорости;  - передаточная функция силового преобразователя (например, тиристорного преобразователя), где
- передаточная функция силового преобразователя (например, тиристорного преобразователя), где  - коэффициент усиления преобразователя,
- коэффициент усиления преобразователя,  ,
,  - постоянная времени силового преобразователя;
- постоянная времени силового преобразователя;  - передаточная функция датчика скорости (тахогенератора постоянного тока), где
- передаточная функция датчика скорости (тахогенератора постоянного тока), где  В∙ с - коэффициент усиления датчика;
В∙ с - коэффициент усиления датчика;  - передаточная функция двигателя постоянного тока с внутренним возбуждением, управляемого по якорной цепи, где
- передаточная функция двигателя постоянного тока с внутренним возбуждением, управляемого по якорной цепи, где  - управляющее якорное напряжение,
- управляющее якорное напряжение,  - коэффициент усиления двигателя,
- коэффициент усиления двигателя,  - электромеханическая постоянная времени двигателя.
- электромеханическая постоянная времени двигателя. В - номинальное напряжение двигателя;
В - номинальное напряжение двигателя;  кВт - номинальная мощность двигателя;
кВт - номинальная мощность двигателя;  об/мин - номинальная частота вращения двигателя;
об/мин - номинальная частота вращения двигателя;  = 7 А - номинальный ток в цепи якоря;
= 7 А - номинальный ток в цепи якоря;  Ом - номинальное активное сопротивление якорной цепи;
Ом - номинальное активное сопротивление якорной цепи;  кг∙ м2 - приведенный к валу двигателя суммарный момент инерции.
кг∙ м2 - приведенный к валу двигателя суммарный момент инерции. В;
В;  ;
;  с.
с. и электромеханической постоянной времени
и электромеханической постоянной времени  .
.
 . (5.1)
. (5.1) (5.2)
(5.2) и постоянную по противо-ЭДС
и постоянную по противо-ЭДС  . При этом постоянную двигателя по противо-ЭДС
. При этом постоянную двигателя по противо-ЭДС  определяют по формуле (5.2) аналогично определению конструктивной постоянной, а постоянную по моменту
определяют по формуле (5.2) аналогично определению конструктивной постоянной, а постоянную по моменту  определяют из выражения:
определяют из выражения:  (5.3)
(5.3) - номинальный вращающий момент двигателя, определяемый
- номинальный вращающий момент двигателя, определяемый (5.4)
(5.4) Однако при использовании упрощенной формулы (5.3) и формулы (5.2) строгое равенство может не наблюдаться.
Однако при использовании упрощенной формулы (5.3) и формулы (5.2) строгое равенство может не наблюдаться. и
и  :
:  ;
;  , (5.5)
, (5.5) и
и  :
:  ;
;  . (5.6)
. (5.6) и
и  из выражений (5.5):
из выражений (5.5):  с,
с,  .
. . Это допустимо, т.к. датчик скорости моделируется безынерционным элементом с передаточной функцией
. Это допустимо, т.к. датчик скорости моделируется безынерционным элементом с передаточной функцией  и, следовательно, звено с передаточной функцией
и, следовательно, звено с передаточной функцией  может только масштабировать выходную координату САУ, не меняя динамических параметров. Запишем передаточную функцию разомкнутой нескорректированной системы
может только масштабировать выходную координату САУ, не меняя динамических параметров. Запишем передаточную функцию разомкнутой нескорректированной системы (5.7)
(5.7)

 , обеспечивается заданная точность в установившемся режиме. Этот коэффициент, называемый добротностью по скорости, определяется по заданной скоростной ошибкеε ск . Для рассматриваемого примера скорость изменения управляющего напряжения v=10 В/с. Следовательно, коэффициент усиления скорректированной системы, необходимый для обеспечения
, обеспечивается заданная точность в установившемся режиме. Этот коэффициент, называемый добротностью по скорости, определяется по заданной скоростной ошибкеε ск . Для рассматриваемого примера скорость изменения управляющего напряжения v=10 В/с. Следовательно, коэффициент усиления скорректированной системы, необходимый для обеспечения  В, будет равен:
В, будет равен: 

 с учетом требуемого коэффициента усиления
с учетом требуемого коэффициента усиления  . Для этого предварительно находим:
. Для этого предварительно находим:  дБ,
дБ, 
 ;
;  ;
; 
 .
.

 дБ, и через точку с этой ординатой проводим низкочастотную асимптоту с наклоном -20 дБ/дек до
дБ, и через точку с этой ординатой проводим низкочастотную асимптоту с наклоном -20 дБ/дек до 
 будут проявляться свойства апериодического звена с передаточной функцией
будут проявляться свойства апериодического звена с передаточной функцией  , значит при этой частоте изменяем наклон ЛАЧХ на -20 дБ/дек. Начиная с частоты
, значит при этой частоте изменяем наклон ЛАЧХ на -20 дБ/дек. Начиная с частоты  , ЛАЧХ нескорректированной системы будет иметь наклон -60 дБ/дек (в соответствии с проявлением свойств апериодического звена с передаточной функцией
, ЛАЧХ нескорректированной системы будет иметь наклон -60 дБ/дек (в соответствии с проявлением свойств апериодического звена с передаточной функцией  ).
). изображена на рисунке 5.3.
изображена на рисунке 5.3.
 пересекает ось
пересекает ось  " раньше", чем кривая
" раньше", чем кривая  пересекает линию -180°.
пересекает линию -180°. .
. ВЧХ, соответствующий заданному значению перерегулирования
ВЧХ, соответствующий заданному значению перерегулирования  . Для этого задаемся значением перерегулирования
. Для этого задаемся значением перерегулирования  , выбираем
, выбираем  По графику
По графику  изображенному на рисунке П.1.1, определяем максимальное значение ВЧХ, соответствующее выбранному значению
изображенному на рисунке П.1.1, определяем максимальное значение ВЧХ, соответствующее выбранному значению  ,
,  . Теперь находим минимальное значение ВЧХ по (3.5)
. Теперь находим минимальное значение ВЧХ по (3.5)
 подсчетом общего перерегулирования по (3.6)
подсчетом общего перерегулирования по (3.6)
 . Следовательно,
. Следовательно,  выбрано верно.
выбрано верно. исходя из требуемого времени регулирования
исходя из требуемого времени регулирования  и перерегулирования
и перерегулирования  находим с помощью графика
находим с помощью графика  изображенного на рисунке П.1.1, при
изображенного на рисунке П.1.1, при  и заданном
и заданном  c
c ;
; 


 с
с 

 на ось частот. Через эту точку проводим среднечастотную асимптоту
на ось частот. Через эту точку проводим среднечастотную асимптоту  с наклоном -20 дБ/дек.
с наклоном -20 дБ/дек. (рисунок П.1.2) значения
(рисунок П.1.2) значения  дБ и ∆ φ , соответствующие заданной величине перерегулирования
дБ и ∆ φ , соответствующие заданной величине перерегулирования  =33%. Из графиков получаем значения ∆ L=14 дБ;
=33%. Из графиков получаем значения ∆ L=14 дБ;  = 30°. Граничные частоты среднечастотной асимптоты
= 30°. Граничные частоты среднечастотной асимптоты  и
и  определяем графически по уровню ±2 дБ по отношению к ±∆ L (3.9):
определяем графически по уровню ±2 дБ по отношению к ±∆ L (3.9):  с
с  с
с  . При этом будет достигнута требуемая точность в установившемся режиме. Высокочастотная асимптота желаемой ЛАЧХ совпадает с высокочастотной асимптотой ЛАЧХ нескорректированной системы.
. При этом будет достигнута требуемая точность в установившемся режиме. Высокочастотная асимптота желаемой ЛАЧХ совпадает с высокочастотной асимптотой ЛАЧХ нескорректированной системы. проверяем обеспечивается ли требуемое значение запаса устойчивости по фазе, определенное из графика на рисунке П.1.2 (в нашем случае
проверяем обеспечивается ли требуемое значение запаса устойчивости по фазе, определенное из графика на рисунке П.1.2 (в нашем случае  и
и  . Расчет фазового сдвига делаем на основании передаточной функции желаемой системы, определенной по построенной желаемой ЛАЧХ
. Расчет фазового сдвига делаем на основании передаточной функции желаемой системы, определенной по построенной желаемой ЛАЧХ ,
, 




 с
с  .
. с
с  .
. ), то можно принять построенную желаемую ЛАЧХ
), то можно принять построенную желаемую ЛАЧХ  за ЛАЧХ скорректированной системы.
за ЛАЧХ скорректированной системы. показана на рисунке 5.3. Для окончательного формирования ЛАЧХ КУ
показана на рисунке 5.3. Для окончательного формирования ЛАЧХ КУ  необходимо переместить полученную характеристику вдоль оси ординат на
необходимо переместить полученную характеристику вдоль оси ординат на дБ.
дБ. изображена на рисунке 5.3 и отдельно на рисунке 5.4.
изображена на рисунке 5.3 и отдельно на рисунке 5.4.
 ;
;  c;
c;  c;
c;  c;
c;  c - постоянные времени корректирующего устройства, определенные по графику (рисунок 5.3).
c - постоянные времени корректирующего устройства, определенные по графику (рисунок 5.3).
 ,
,  ;
;  ;
; 


 , который обеспечивается введением в схему делителя напряжения. Принципиальная электрическая схема такого устройства представлена на рисунке 5.6.
, который обеспечивается введением в схему делителя напряжения. Принципиальная электрическая схема такого устройства представлена на рисунке 5.6. ) не оказалось зашунтированным элементами звена. При практическом исполнении схемы необходимо учитывать, что
) не оказалось зашунтированным элементами звена. При практическом исполнении схемы необходимо учитывать, что  .
.
 кОм, тогда
кОм, тогда мкФ;
мкФ;  кОм;
кОм;  мкФ
мкФ =6, 2 мкФ (ряд Е24),
=6, 2 мкФ (ряд Е24),  = 240 кОм (ряд Е24),
= 240 кОм (ряд Е24),  =0, 1 мкФ(ряд Е24).
=0, 1 мкФ(ряд Е24). и
и  используем следующие соотношения:
используем следующие соотношения: 
 = 2+10 кОм = 6 кОм, исходя из того, что регулятор в данной схеме управления реализуется на операционном усилителе, и делитель напряжения оказывается включенным на его выходе. Для нормальной работы регулятора входное сопротивление делителя выбирается не меньше 1 кОм. Рекомендуется брать
= 2+10 кОм = 6 кОм, исходя из того, что регулятор в данной схеме управления реализуется на операционном усилителе, и делитель напряжения оказывается включенным на его выходе. Для нормальной работы регулятора входное сопротивление делителя выбирается не меньше 1 кОм. Рекомендуется брать  в диапазоне 2¸ 10 кОм. Теперь определяем номиналы резисторов
в диапазоне 2¸ 10 кОм. Теперь определяем номиналы резисторов  по полученным выше соотношениям:
по полученным выше соотношениям:  кОм;
кОм;  кОм.
кОм. 3, 3 кОм,
3, 3 кОм,  2, 7 кОм, (в соответствии с рядом Е24).
2, 7 кОм, (в соответствии с рядом Е24).
 , получим
, получим
 дБ и по фазе ∆ φ = 78°.
дБ и по фазе ∆ φ = 78°.
 , передаточную функцию можно упростить и записать в виде:
, передаточную функцию можно упростить и записать в виде: 
 и
и  . Под номинальной амплитудой
. Под номинальной амплитудой  следует понимать уровень задающего сигнала, соответствующий номинальной скорости или номинальному углу поворота вала двигателя (
следует понимать уровень задающего сигнала, соответствующий номинальной скорости или номинальному углу поворота вала двигателя (  или
или  ). Для расчета кривых использовать программу «MatLab».
). Для расчета кривых использовать программу «MatLab». , передаточная функция двигателя записывается в виде
, передаточная функция двигателя записывается в виде  . Если в качестве регулируемого параметра выбирается угол поворота вала
. Если в качестве регулируемого параметра выбирается угол поворота вала  , то передаточная функция двигателя имеет вид
, то передаточная функция двигателя имеет вид  (т.к.
(т.к.  ).
).