
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
БАЗОВЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Рассмотрим некоторые основные понятия и определения, необходимые для синтеза систем автоматического управления и расчета корректирующих устройств. Передаточная функция. Обратимся к линейной САУ, на входе которой действует сигналx(t), а на выходе - сигналy(t) (рисунок 1.1).
Рисунок 1.1 - Условное представление САУ в координатах " вход/выход"
В общем случае такая система может быть описана линейным дифференциальным уравнением вида:
где n - порядок уравнения системы. Преобразуем это уравнение по Лапласу. Прямое преобразование Лапласа заключается в замене некоторой функции времени f(t), называемой оригиналом, функцией комплексной переменной
Для перехода от изображенияF(p) к оригиналу f(t) используется обратное преобразование Лапласа
где с - положительная константа. Применим прямое преобразование Лапласа к (1.1)
Учитывая, что
Вынося Х(р) и Y(p) за скобки, перепишем это уравнение так:
Из (1.5) получим отношение:
где n≥ m (для физически реализуемых систем). Это отношение называется передаточной функцией (ПФ) линейной системы. Таким образом, передаточная функция САУ может быть определена как отношение изображения по Лапласу выходного сигнала системы к изображению по Лапласу входного сигнала системы при нулевых начальных условиях. Существуют системы, в которых часть коэффициентов знаменателя в выражении (1.6) равна нулю (b0=b1=…=bν -1=0). В этом случае передаточная функция может быть представлена в следующем виде:
где Для статических систем (v=0) коэффициент усиления При решении задач синтеза передаточную функцию системы удобно представлять в виде произведения сомножителей типа (1+ Тр):
Если знаменатель или числитель (1.6) содержит комплексные корни, то в (1.8) появятся сомножители вида Формула (1.8) особенно удобна при построении логарифмических частотных характеристик. Частотные характеристики. Кроме передаточной функции любая линейная САУ может быть охарактеризована частотными характеристиками. Для получения частотных характеристик используется преобразование Фурье, которое связывает функцию времениf(t) с ее частотным изображениемF(jω ) выражениями
где F и F-1 - обозначения операций прямого и обратного преобразования Фурье. Преобразуем дифференциальное уравнение (1.1) по Фурье:
Учитывая, что
Из уравнения (1.12) можно получить отношение:
Функция W(jω ) называется комплексным коэффициентом передачи (ККП) линейной САУ. Таким образом, комплексный коэффициент передачи линейной САУ может быть определен как отношение изображения по Фурье выходного сигнала системы к изображению по Фурье входного сигнала системы. ФункцииY(jω ) и X(jω ) принято называть спектрами функции y(t) и x(t). В соответствии с этим, комплексный коэффициент передачи можно определить как отношение спектров выходного и входного сигналов САУ. Комплексный коэффициент передачи, как любая комплексная функция, может быть представлен в алгебраической и показательной формах. В алгебраической форме комплексный коэффициент передачи записывается в виде:
где P(ω ) - вещественная составляющая комплексного коэффициента передачи, называемая вещественной частотной характеристикой (ВЧХ); Q(ω ) - мнимая составляющая, называемая мнимой частотной характеристикой (МЧХ). В показательной форме комплексный коэффициент передачи записывается в виде:
где
Для перехода от одной формы записи к другой используются следующие соотношения:
Геометрическое место концов векторов комплексного коэффициента передачи при изменении частоты от нуля до бесконечности называется частотным годографам или амплитудно-фазовой частотной характеристикой звена (АФЧХ). Эту характеристику можно построить в декартовой и полярной системах координат. Обычно полярную систему координат совмещают с декартовой. За полюс принимается начало декартовых координат, а за полярную ось - положительная вещественная ось. Для построения АФЧХ в декартовой системе координат комплексный коэффициент передачи представляют в алгебраической форме (1.14). По оси абсцисс откладывается вещественная часть Р(ω ) и по оси ординат - мнимая частьQ(ω ). Для каждой частоты на комплексной плоскости наносится точка. Полученные точки соединяются плавной кривой. Около нанесенных точек указываются соответствующие им частоты. Для построения АФЧХ в полярной системе координат комплексный коэффициент передачи представляют в показательной форме (1.15). Задаваясь различными значениями частоты, строят вектор в полярной системе координат, длина которого определяется модулемА(ω ), а угол его поворота относительно полярной оси - аргументомφ (ω )комплексного коэффициента передачи системы. Пример построения амплитудно-фазовой частотной характеристики показан на рисунке 1.2.
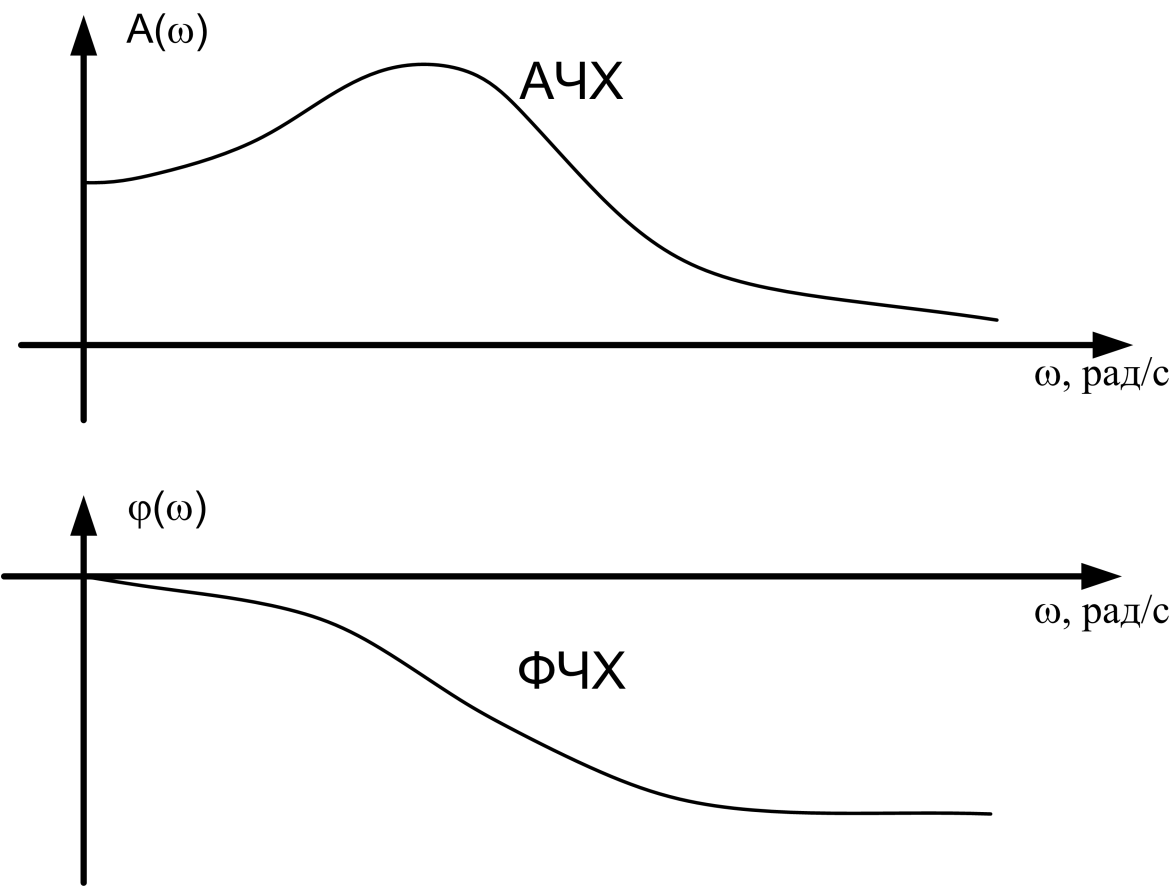
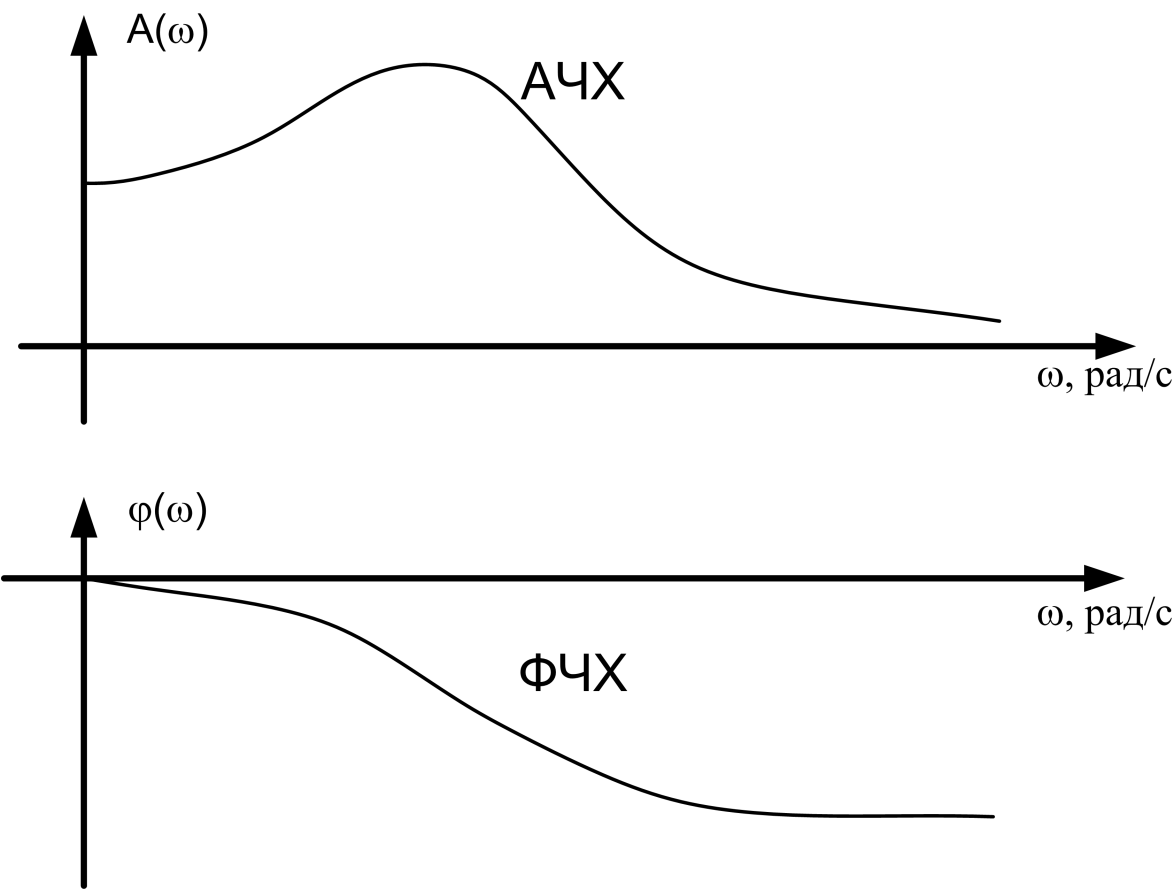
Рисунок 1.2 - К построению частотного годографа Вместо амплитудно-фазовой частотной характеристики можно построить отдельно АЧХ и ФЧХ. Это построение показано на рисунке 1.3. Фактически АЧХ представляет собой кривую зависимости модуля комплексного коэффициента передачиА(ω ) от угловой частотыω. Она показывает, как система преобразует сигналы различной частоты и определяется отношением амплитуд выходного и входного сигналов (координат). С практической точки зрения, АЧХ - это зависимость коэффициента усиления (преобразования) САУ от частоты:
где
Физическая размерность АЧХ может быть разной. Например, если выходной координатой САУ является температура воздуха в помещении ( Если же, к примеру, выходной координатой является скорость вращения вала электродвигателя ( Для большинства же чисто электронных системA(ω ) безразмерна, т.к. выходная и входная координаты (или сигналы) измеряются в одинаковых единицах (В, А, Вт).
Рисунок 1.3 - К построению АЧХ и ФЧХ Фазочастотная характеристика представляет собой кривую зависимости аргумента комплексного коэффициента передачиφ (ω ) от частоты ω, и показывает, как изменяется сдвиг по фазе между выходным и входным гармоническим сигналом на различных частотах. Можно построить отдельно также вещественную и мнимую частотные характеристики по аналитическим выражениям для Р(ω ) и Q(ω ) (см. рисунок 1.4). Вещественная частотная характеристика представляет собой кривую зависимости вещественной части ККП Р(ω ) от частотыω, а мнимая частотная характеристика - зависимость мнимой части ККПQ(ω ) от частоты. Следует подчеркнуть, что в отличие от других частотных характеристик (ККП, ВЧХ, МЧХ), только АЧХ и ФЧХ можно интерпретировать физически и определить экспериментально. При исследовании систем автоматического управления АЧХ и ФЧХ удобно строить в логарифмических координатах. Это связано с двумя обстоятельствами. Во-первых, при этом возможна замена точных логарифмических амплитудно- частотных характеристик отрезками прямых - асимптотами. Во-вторых, логарифмическая частотная характеристика цепочки последовательно соединенных звеньев получается сложением характеристик отдельных звеньев, что имеет первостепенное значение при синтезе последовательных корректирующих устройств. Логарифмическая амплитудно-частотная характеристика (ЛАЧХ) строится в виде зависимости
Рисунок 1.4 - К построению ВЧХ и МЧХ
В качестве единицы измерения этой величины используется децибел (дБ), равный одной десятой бела (Б). Бел представляет собой относительную логарифмическую единицу, соответствующую увеличению мощности в 10 раз. Учитывая, что мощность сигнала пропорциональна квадрату его амплитуды, можно определить бел через отношение амплитуд сигналов. Поясним это следующим образом. Если мощность выходного сигнала САУ в десять раз больше мощности входного сигнала, то
Так как бел слишком большая единица, то удобнее пользоваться производной единицей - дБ. Поскольку же 1 Б = 10 дБ, то величина, имеющая размерность в дБ, должна записываться так:
При увеличении отношения амплитуд в десять раз отношение мощностей увеличивается в сто раз, что соответствует двум белам или двадцати децибелам. Поэтому в выражении (1.17) стоит множитель 20. Запись выражения (1.17) нуждается еще в одной существенной оговорке, так как логарифмировать можно только безразмерную величину. Но выше отмечалось, чтоА(ω ) может иметь различную размерность. В этой связи более корректна запись:
где А0 - эталонная величина, принимаемая за единицу ( Такое же замечание относится и к величине
где
Логарифмическая фазочастотная характеристика (ЛФЧХ) строится в полулогарифмических координатах в виде зависимостиω от lgω , чтобы обе характеристики были связаны одним масштабом на оси абсцисс. Для построения JIAЧX и ЛФЧХ используется стандартная сетка (рисунок 1.5). По оси абсцисс откладывается угловая частота в логарифмическом масштабе, т.е. наносятся отметки, соответствующие lgω , а около отметок пишется само значение частотыω в рад/с (в свете сделанного выше замечания относительно размерности логарифмируемых величин, здесь имеется в виду По оси ординат откладывается модуль в децибелах (дБ). Для этой цели на ней наносится равномерный масштаб. Ось абсцисс должна проходить через точку 0 дБ, что соответствует значению модуляА(ω ) = 1. Ось ординат может пересекать ось частот в произвольном месте, так как точка ω =0 лежит на оси частот слева в бесконечности. Поэтому ось ординат проводят левее самой малой сопрягающей частоты ЛАЧХ. Для построения ЛФЧХ используется та же ось абсцисс. По оси ординат откладывается фаза в градусах в линейном масштабе. Допускается оцифровывать эту ось и радианах.
Рисунок 1.5 - Оси для построения ЛАЧХ и ЛФЧХ На практике часто используются упрощённые или асимптотические ЛАЧХ. Рассмотрим построение асимптотической JIAЧX на примере апериодического звена первого порядка. Передаточная функция звена имеет вид
где k Т - постоянная времени. Логарифмическая амплитудно-частотная характеристика строится по выражению
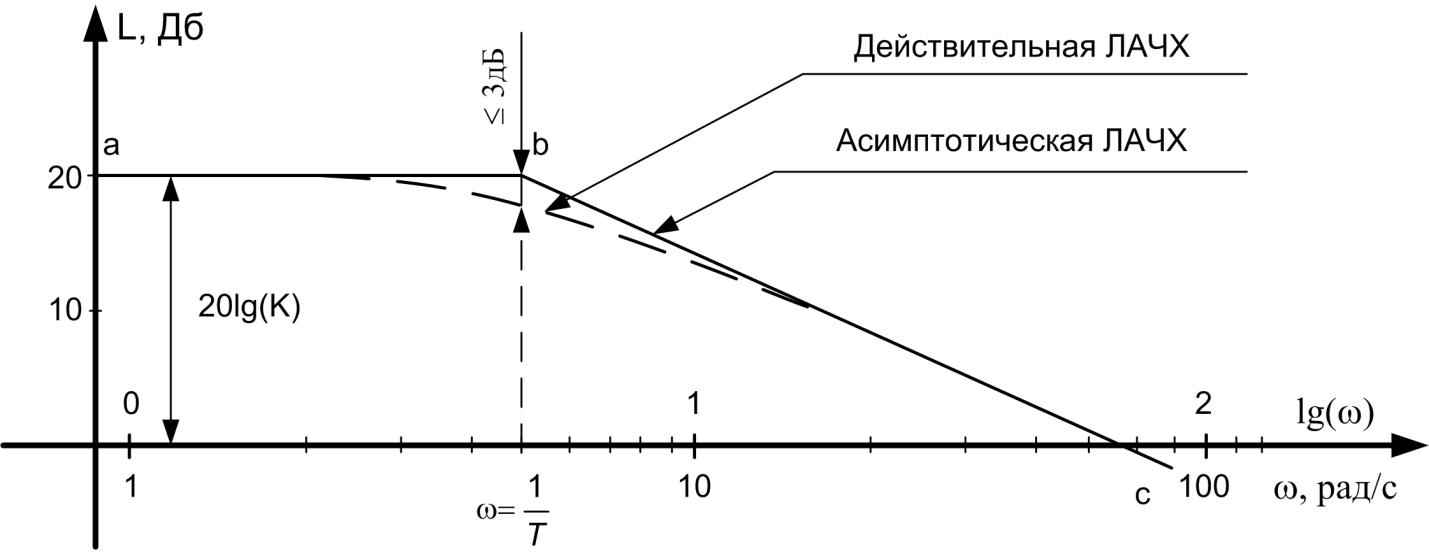
Построение асимптотической ЛАЧХ показано на рисунке 1.6. На стандартной сетке проводим вертикальную прямую через точку с частотой Этому выражению соответствует прямая линия, параллельная оси частот и проходящая на уровне 20lg k (прямая ab). Это и есть первая асимптота. Для частот больших, чем частота перегиба
Рисунок 1.6 - ЛАЧХ апериодического звена первого порядка В этом случае характеристика представляет собой прямую, имеющую наклон - 20 дБ/дек (прямая bc). Эта линия является второй асимптотой. Действительно, при увеличении ω на декаду, т.е. в 10 раз,
Таким образом, величина L(ω ) уменьшилась на 20lg10, т.е. на 20 дБ. Ломанная линия abc называется асимптотической ЛАЧХ. Действительная ЛАЧХ (показана на рисунке 1.6 пунктиром) будет несколько отличаться от асимптотической, причем наибольшее отклонение будет в точке перегиба Временные характеристики применяют для оценки динамических свойств САУ. В теории автоматического управления в зависимости от вида входного воздействия различают переходную характеристику (ПХ) и импульсную переходную функцию (ИПФ). Переходная характеристика h(t) представляет собой переходный процесс на выходе САУ, возникающий при подаче на вход единичного ступенчатого воздействия x(t) = 1(t), что соответствует х = 0 приt ≤ 0 и x =1 приt > 0. Это иллюстрируется рисунок 1.7. Переходная характеристикаh(t) может быть определена через передаточную функцию с помощью обратного преобразования Лапласа. Учитывая, что
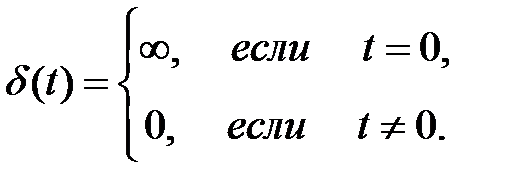
Рисунок 1.7 - К определению переходной характеристики Импульсная переходная функция g(t) или функция веса представляет собой реакцию системы на входное воздействие в виде δ - функции Дирака (рисунок 1.8). δ -функция Дирака называется единичным импульсом, так как она имеет единичную площадь при бесконечно большой амплитуде и бесконечно малой длительности. Математически δ - функцию можно записать так:
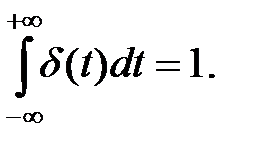
При этом согласно определению
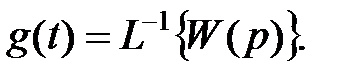
Импульсная переходная функцияg(t) может быть также определена по передаточной функцииW(p) с помощью обратного преобразования Лапласа
Кроме того ИПФ g(t ) может быть получена дифференцированием по времени переходной характеристикиh(t)
Связь временных характеристик с частотными устанавливается с помощью следующих формул:
Рисунок 1.8 - К определению импульсной переходной функции
Точность регулирования САУ в установившемся режиме. Качество работы любой системы управления определяется величиной ошибки, равной разности между требуемым и действительным значениями регулируемой величины:
Для оценки точности САУ используется величина установившейся ошибки в различных типовых режимах. Рассмотрим некоторые из них. 1. Неподвижное состояние. В качестве типового режима рассматривается установившееся состояние при постоянных значениях задающего и возмущающего воздействий. Ошибка системы в этом случае называется статической (ε ст). Рассмотрим САУ, в которой возмущения отсутствуют, а входное воздействие представляет собой ступенчатую функцию x(t)=A∙ 1(t).
где Kр - коэффициент усиления разомкнутой САУ. Наличие статической ошибки в САУ иллюстрируется рисунком 1.9. Для астатических систем ε xст=0. На основе этого можно сформулировать понятие астатизма как свойства САУ. Астатизм - это свойство системы отрабатывать внешнее воздействие с нулевой статической ошибкой. Следует отметить, что словом " астатизм" часто называют не свойство САУ, а ее численную характеристику, более точно именуемую порядком астатизма [1, 3]. 2. Движение с постоянной скоростью. В качестве второго типового воздействия используется режим движения системы с постоянной скоростьюv=const, который наблюдается в установившемся состоянии при изменении входного воздействия по закону Для систем с астатизмом первого порядка скоростная ошибка равна отношению скорости изменения входного воздействия к коэффициенту усиления разомкнутой системы
Заметим, что коэффициент усиления Графически наличие скоростной ошибки иллюстрируется рисунком 1.10.
Рисунок 1.9 - К определению основных показателей качества регулирования: узад - заданное значение выходной координаты; ууст - установившееся значение выходной координаты; ɛ ст- статическая ошибка; утах - максимальное значение выходной координаты в процессе регулирования У статических систем Для исследования точности САУ используются также такие типовые воздействия как движение с постоянным ускорением и гармоническое воздействие [1, 2, 4, 7]. Показатели качества переходного процесса. Применяются для оценки быстродействия и запасов устойчивости САУ. Определяются по виду переходной характеристикиh(t ) и характеризуют поведение системы только в переходном режиме. Важнейшим показателем являетсяперерегулирование. Оно характеризует склонность системы к колебаниям, а следовательно, и запас устойчивости. Определяется перерегулирование по кривой переходного процесса, вызванного приложением на вход системы скачка управляющего воздействия номинальной амплитуды. С учетом обозначений на рисунке 1.9 формула для нахождения перерегулирования имеет вид:
Допустимое перерегулирование для той или иной системы автоматического управления устанавливается исходя из свойств объекта управления и особенностей технологического процесса, в котором используется система. В большинстве случаев считается, что запас устойчивости является достаточным, если величина перерегулирования не превышает 10÷ 30 %. Однако в некоторых случаях требуется, чтобы переходный процесс протекал вообще без перерегулирования, т.е. был монотонным. В ряде случаев допускается перерегулирование 50÷ 70 %.
Рис. 1.10. К определению скоростной ошибки САУ.
Другим важнейшим показателем являетсявремя регулирования (установления) tуст. Оно характеризует быстродействие системы и определяется как время, протекающее от момента приложения на вход системы номинального ступенчатого воздействия до момента, после которого имеет место неравенство
где Если величина Допустимое значение времени регулирования определяется особенностями технологического процесса, в котором применяется САУ. Рассмотренные показатели качества переходного процесса иллюстрируются рисунке 1.9. Существуют также другие показатели качества переходного процесса. Например, интегральные оценки [1, 4, 5] или показатели, основанные на корневых методах анализа особенностей динамики САУ [2, 6, 7]. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2804; Нарушение авторского права страницы

 (1.1)
(1.1) F(p) – изображением
F(p) – изображением (1.2)
(1.2) (1.3)
(1.3)
 , получим уже не дифференциальное, а алгебраическое уравнение в изображениях по Лапласу:
, получим уже не дифференциальное, а алгебраическое уравнение в изображениях по Лапласу:  (1.4)
(1.4) (1.5)
(1.5) (1.6)
(1.6)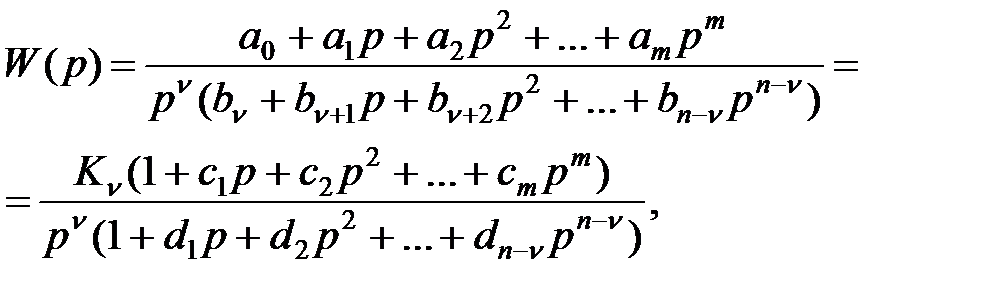 (1.7)
(1.7) - коэффициент усиления САУ, v - порядок астатизма, определяемый количеством интегрирующих звеньев, входящих в САУ.
- коэффициент усиления САУ, v - порядок астатизма, определяемый количеством интегрирующих звеньев, входящих в САУ. безразмерный. Для систем с астатизмом первого порядка (v=1)
безразмерный. Для систем с астатизмом первого порядка (v=1)  .
. (1.8)
(1.8) , где
, где  - показатель затухания или коэффициент демпфирования.
- показатель затухания или коэффициент демпфирования. (1.9)
(1.9) (1.10)
(1.10)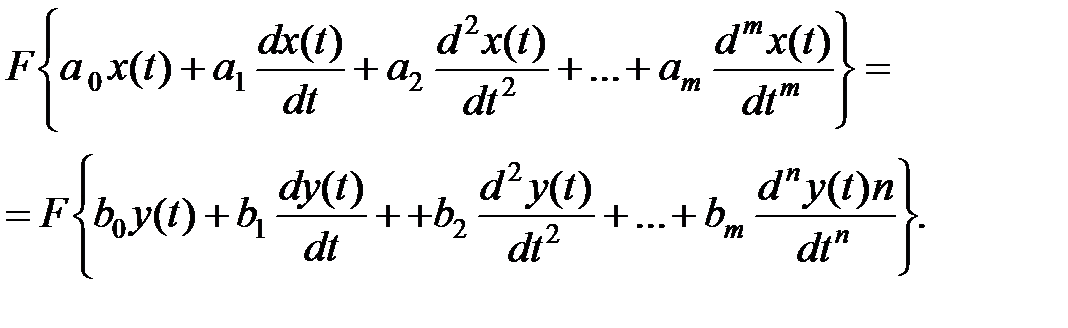 (1.11)
(1.11) , из (1.11) получим:
, из (1.11) получим:  (1.12)
(1.12) 13)
13) (1.14)
(1.14) (1.15)
(1.15) - модуль комплексного коэффициента передачи, называемый амплитудно-частотной характеристикой (АЧХ) САУ;
- модуль комплексного коэффициента передачи, называемый амплитудно-частотной характеристикой (АЧХ) САУ;  - аргумент ККП, называемый фазочастотной характеристикой (ФЧХ) САУ.
- аргумент ККП, называемый фазочастотной характеристикой (ФЧХ) САУ.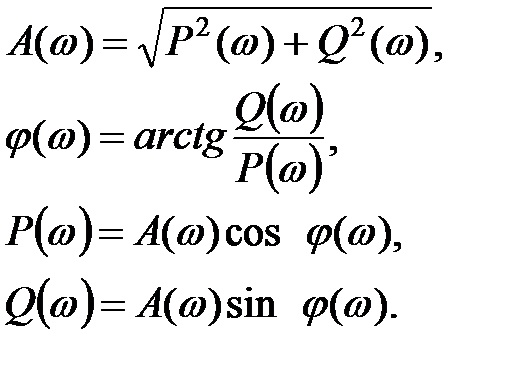 (1.16)
(1.16)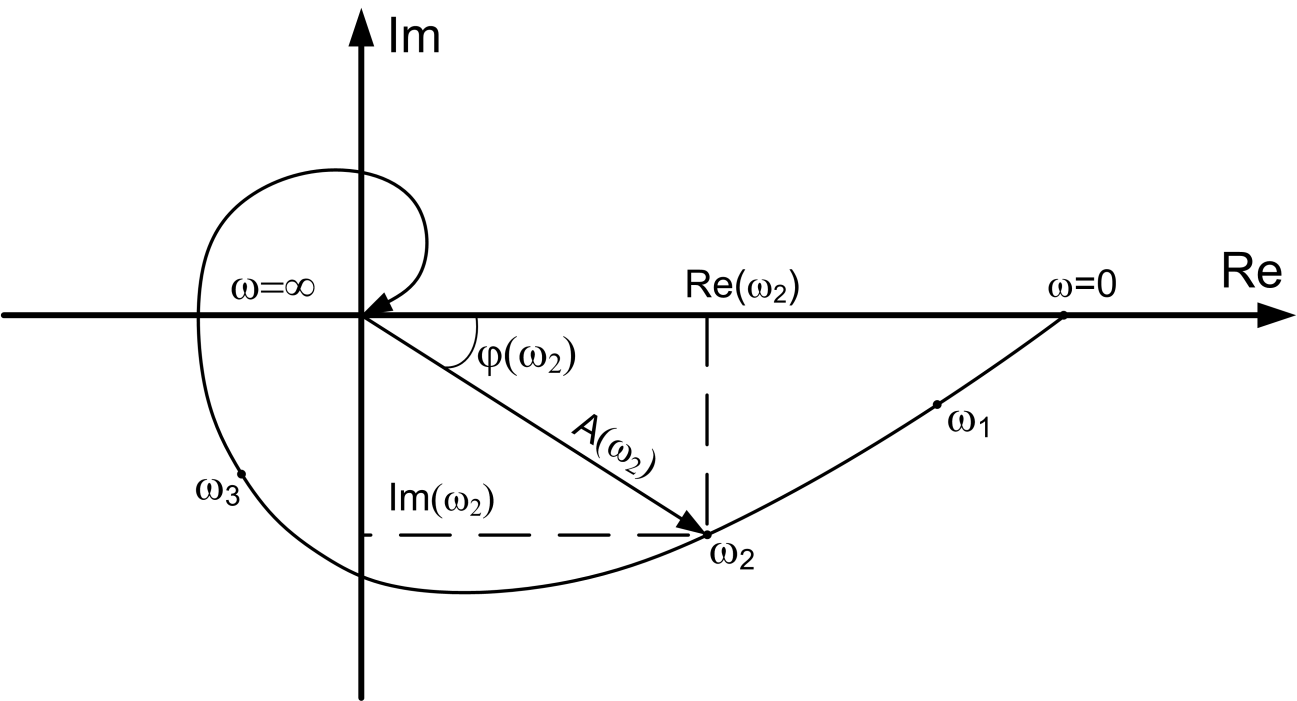
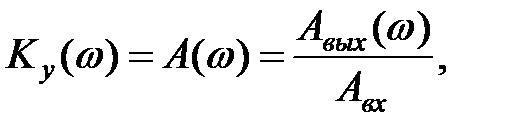
 постоянная на всех частотах амплигуда входного гармонического сигнала;
постоянная на всех частотах амплигуда входного гармонического сигнала;  амплитуда соответствующей реакции САУ, т.е. гармонического колебания выходной координаты (различная на разных частотах).
амплитуда соответствующей реакции САУ, т.е. гармонического колебания выходной координаты (различная на разных частотах). )
)  а входное воздействие на систему задается в виде напряжения (
а входное воздействие на систему задается в виде напряжения (  ), то
), то  .
. ), а в качестве задающего воздействия фигурирует давление газа (
), а в качестве задающего воздействия фигурирует давление газа (  ), то
), то  .
.
 от
от  . Величина
. Величина  обозначается
обозначается .
.
 (1.17)
(1.17)
 и т.п.)
и т.п.) . Угловая частотаω имеет размерность
. Угловая частотаω имеет размерность  и, строго говоря, не может логарифмироваться. Поэтому под ω следует понимать относительную угловую частоту в соответствии с выражением
и, строго говоря, не может логарифмироваться. Поэтому под ω следует понимать относительную угловую частоту в соответствии с выражением
 истинное (размерное) значение угловой частоты;
истинное (размерное) значение угловой частоты;  эталонная частота, равная
эталонная частота, равная 
 фактически относительная частота, совпадающая по величине с истинной.
фактически относительная частота, совпадающая по величине с истинной. ). Единица приращения логарифма соответствует одной декаде, т.е. изменению частоты в 10 раз.
). Единица приращения логарифма соответствует одной декаде, т.е. изменению частоты в 10 раз.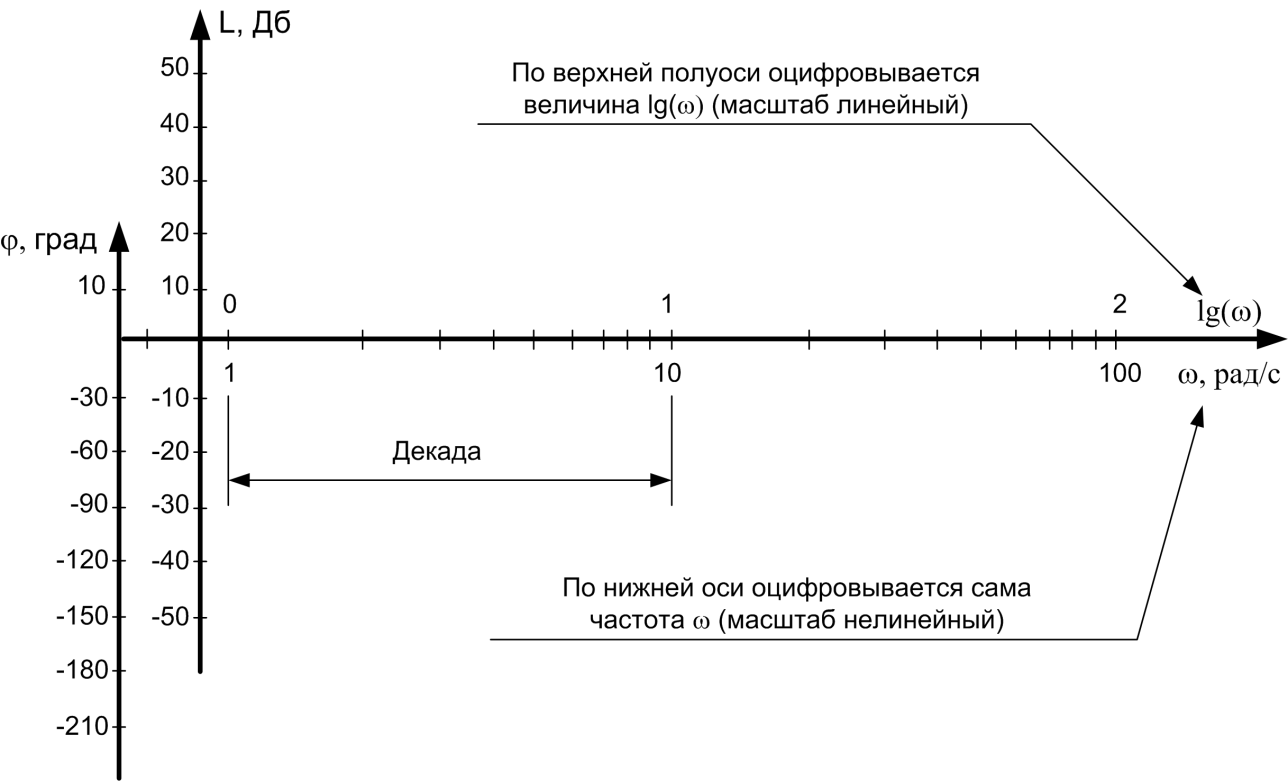
 (1.18)
(1.18) коэффициент усиления звена;
коэффициент усиления звена;  (1.19)
(1.19) , называемой частотой перегиба. Для частот меньших, чем частота перегиба, т.е.
, называемой частотой перегиба. Для частот меньших, чем частота перегиба, т.е.  , можно пренебречь вторым слагаемым под корнем в выражении (1.19). Тогда
, можно пренебречь вторым слагаемым под корнем в выражении (1.19). Тогда т.е.
т.е.  .
. можно пренебречь под корнем единицей по сравнению с
можно пренебречь под корнем единицей по сравнению с  в выражении (1.19). Тогда
в выражении (1.19). Тогда т.е.
т.е. 

 (1.20)
(1.20)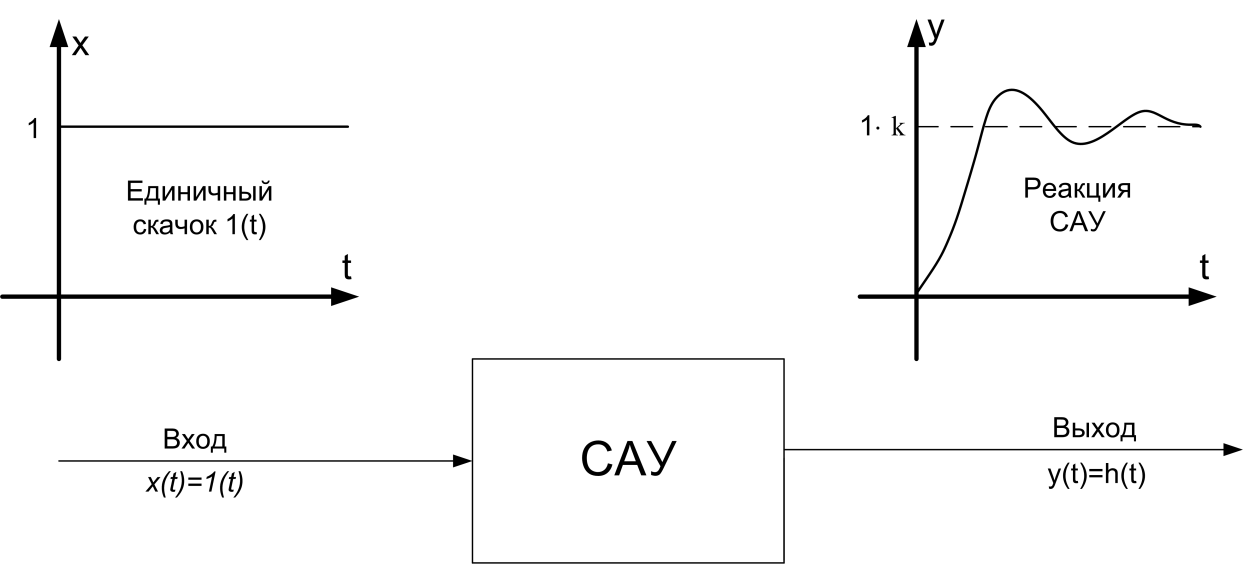
 (1.21)
(1.21) (1.22)
(1.22)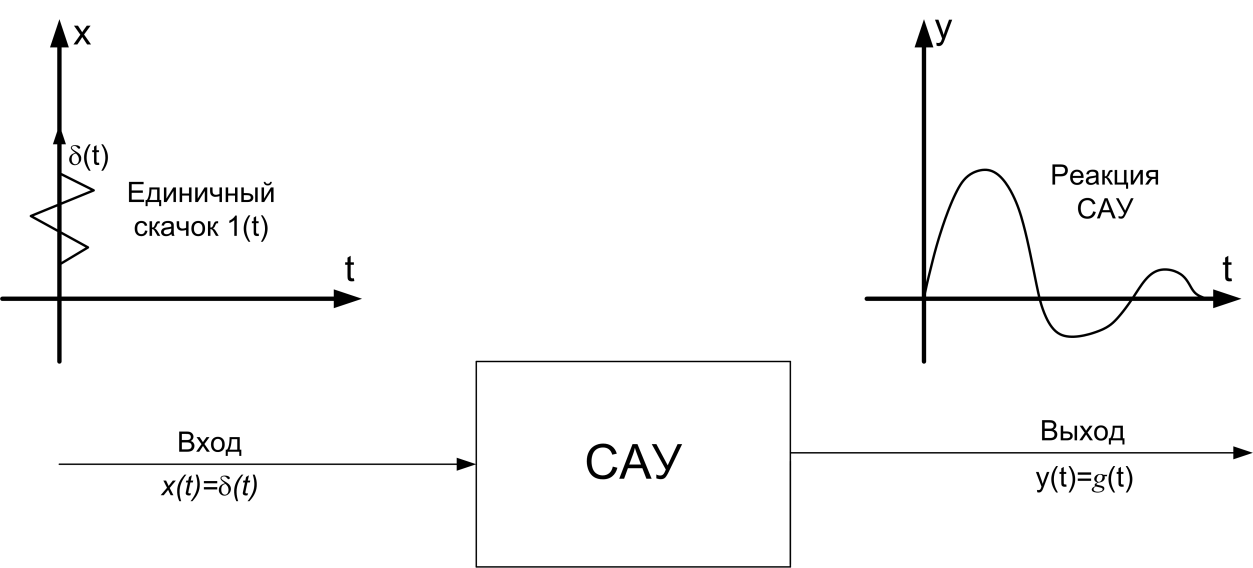
 (1.23)
(1.23)
 В этом случае ошибка системы будет представлять собой статическую ошибку по входному воздействию (ε xст)
В этом случае ошибка системы будет представлять собой статическую ошибку по входному воздействию (ε xст)  Для статических систем она определяется следующим образом:
Для статических систем она определяется следующим образом: 
 , где v=const.установившаяся ошибка в этом случае носит название скоростной ошибки (ɛ ск).
, где v=const.установившаяся ошибка в этом случае носит название скоростной ошибки (ɛ ск). (1.25)
(1.25) в этом случае часто называют добротностью САУ по скорости.
в этом случае часто называют добротностью САУ по скорости.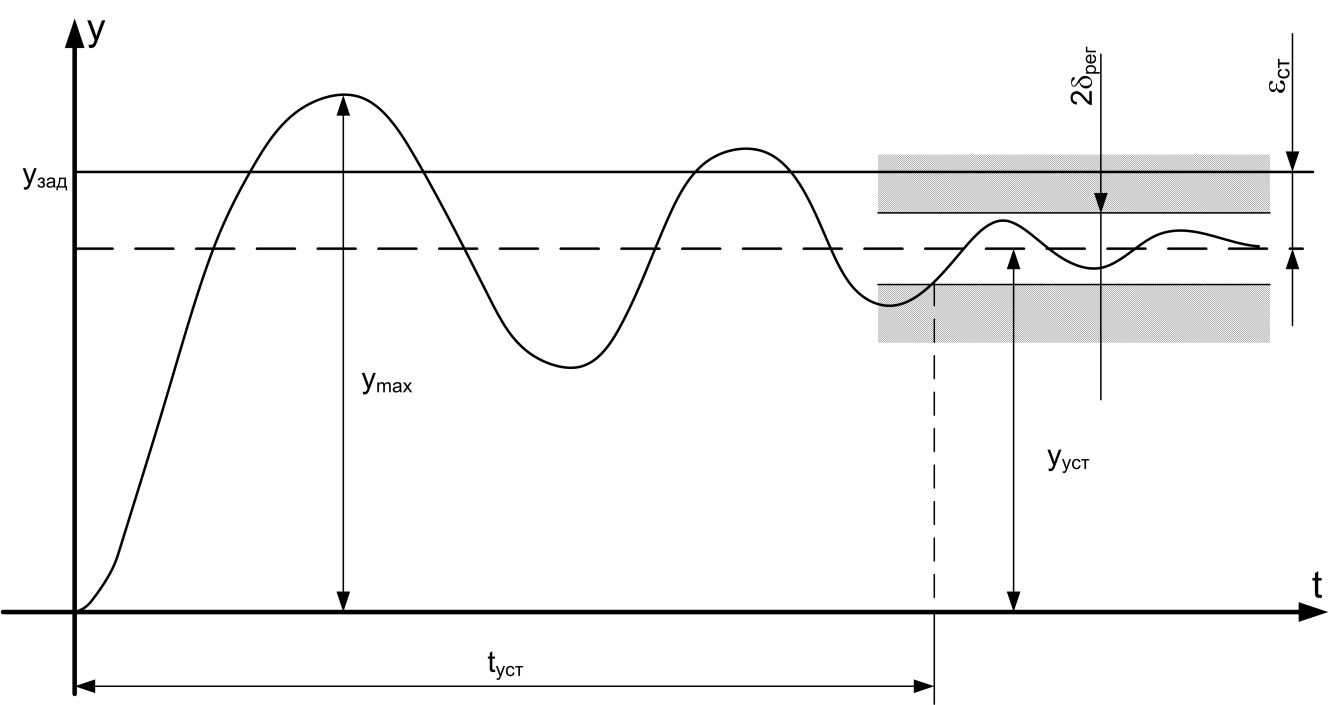
 ; при астатизме выше первого порядка ε xст=0. Поэтому режим движения с постоянной скоростью, как правило, используется для оценки точности систем с астатизмом именно первого порядка.
; при астатизме выше первого порядка ε xст=0. Поэтому режим движения с постоянной скоростью, как правило, используется для оценки точности систем с астатизмом именно первого порядка. (1.26)
(1.26)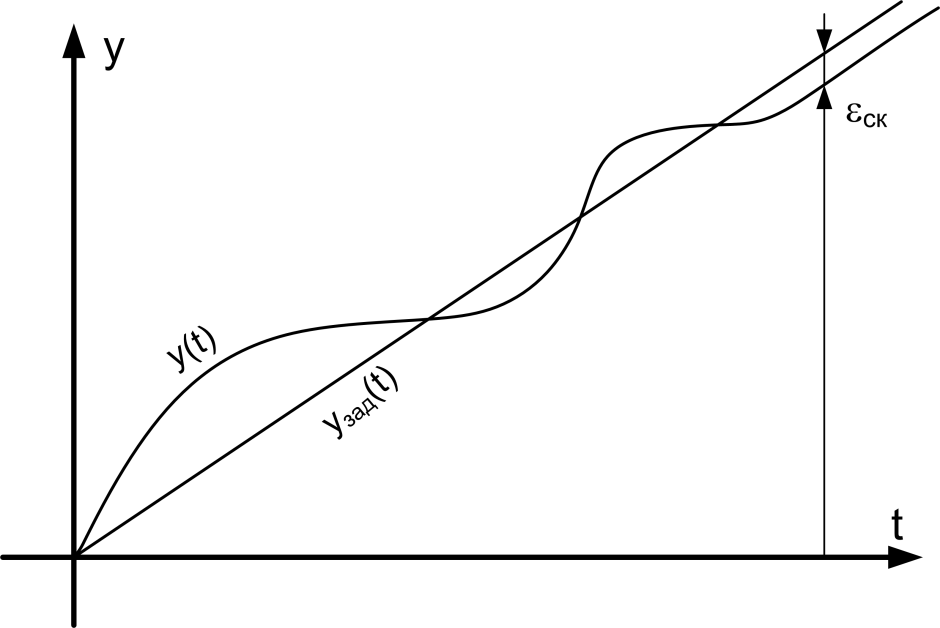

 данное значение отклонения процесса от абсолютно установившегося значения
данное значение отклонения процесса от абсолютно установившегося значения  , определяющее точность нахождения tуст.
, определяющее точность нахождения tуст. оговаривается, то принимаем
оговаривается, то принимаем  от
от