|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Режимы работы объекта. Возмущающие воздействия
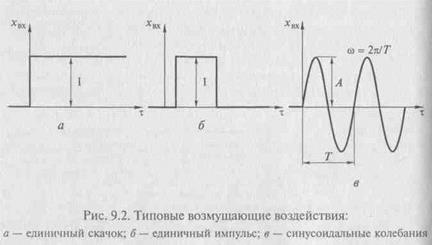
При исследовании объектов управления используется метод математического моделирования. Причем объект рассматривается как простой преобразователь входного сигнала в выходной без учета физико-химической сущности процесса, протекающего в нем, т.е. целью исследования объекта управления является формирование его математической модели — уравнения взаимосвязи выходного сигнала объекта (регулируемого параметра) с входным сигналом. Объект управления может работать в двух режимах: статическом и динамическом. Статический режим — это режим работы, при котором приток энергии или вещества в объект равен оттоку, и объект находится в состоянии равновесия. Например, это движение поезда по горизонтальной плоскости с постоянной скоростью, когда сила тяги уравновешена силой трения. Динамический режим — это режим работы объекта, при котором нарушено равновесие между притоком и оттоком энергии или вещества. Математическая модель объекта или уравнение математической взаимосвязи его выходного и входного сигналов в динамическом режиме работы называется динамической характеристикой. Схема исследования объекта управления изображена на рис. 9.1. Поскольку в динамическом режиме работы выходной и входной сигналы объекта изменяются во времени или пространстве, то его динамическая характеристика, как правило, описывается дифференциальным уравнением. В настоящее время дифференциальные уравнения являются основным инструментом при математическом описании всего, что изменяется во времени и пространстве: от процесса набухания почек растения до перемещения космических тел. К сожалению, большинство дифференциальных уравнений не имеет общего решения, а частные решения (для заданных условий) с помощью численных методов Эйлера, Рунге-Кутта и других требуют много вычислений. Если при исследовании не учитывать физико-химическую сущность технологических процессов, протекающих в объекте (т.е. рассматривать его как «черный ящик»), оказывается, что различные по своему объему, конфигурации и назначению объекты управления в динамическом режиме описываются одними и теми же типами уравнений взаимосвязи выходного и входного сигналов. В ТАУ удачно подобраны всего шесть типов уравнений взаимосвязи выходного и входного сигналов объектов (или элементов) САУ, которые названы типовыми динамическими звеньями и которые составляют математический аппарат (инструмент), используемый при исследовании объектов в целях получения математических моделей. Методика применения этого математического инструмента — совокупности шести типовых динамических звеньев (ТДЗ) заключается в следующем. На действующий объект управления (то что объект должен уже работать, является недостатком данного метода) по входному каналу подается одно из трех типовых возмущающих воздействий (рис. 9.2):
единичный скачок; единичный импульс; синусоидальные колебания с различными частотой (ω ) или периодом T. Амплитуда А синусоидальных колебаний может быть постоянной, но по значению она должна быть достаточной, чтобы выходной сигнал также был синусоидальным. На практике чаще всего используют возмущающее воздействие \\ виде единичного скачка. Реакция объекта на это возмущение (график изменения во времени выходного сигнала объекта после подачи его на вход возмущения в виде единичного скачка) называется кривой разгона. На рис. 9.3 схематично изображено типовое динамическое звено. Схема ТДЗ похожа на схему исследования объекта управления; принципиальное их различие состоит в том, что объект — это материальное воплощение технологического процесса, а ТДЗ — математическая абстракция, за которой нет ничего кроме типового уравнения взаимосвязи его выходного и входного сигналов. Каждое типовое динамическое звено имеет свою типовую кривую разгона и ряд других типовых характеристик. Полученную на действующем объекте экспериментальную кривую разгона сравнивают с набором шести кривых разгона ТДЗ и при совпадении характера изменения во времени экспериментальной и какой-либо типовой кривой разгона проводят замену (аппроксимацию) исследуемого объекта соответствующим типовым динамическим звеном. Таким образом, типовое уравнение взаимосвязи выходного и входного сигналов ТДЗ становится уравнением взаимосвязи соответствующих сигналов объекта, или искомой математической моделью. Коэффициенты, входящие в уравнение ТДЗ, находят по экспериментальной кривой разгона объекта. Более удобный и практичный математический аппарат, чем совокупность из шести ТДЗ, используемых в ТАУ, трудно представить, т. е любые объекты управления можно исследовать и поручить их математические модели — динамические характеристики (с достаточной для практики точностью), используя всего шесть типовых динамических звеньев.
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 2747; Нарушение авторского права страницы