|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принципы построения систем телемеханики
Системы телемеханики используют для контроля и управления объектами на расстоянии. По аналогии с классификацией систем автоматического контроля и управления здесь также различают системы телеконтроля, т. е. системы, обеспечивающие контроль, регистрацию или сигнализацию о состоянии параметров ОУ на расстоянии, и системы телеуправления, т. е. системы, обеспечивающие контроль параметров ОУ и управление ими на расстоянии. Системы телемеханики применяют в ирригационных сооружениях, электросистемах, тепличных и других комплексах, т.е. там, где необходимо контролировать и управлять объектом на больших расстояниях. Основные элементы системы телемеханики: источник информации — собирает, хранит и выдает исходные данные, которые необходимо передавать на расстояние. Источниками информации в системах телеконтроля являются датчики, регистрирующие приборы и ЭВМ, а в системах телеуправления — программные устройства, ЭВМ и человек, управляющий объектом на расстоянии; распределитель (шифратор) — шифрует передаваемую информацию, так как по каналу связи одновременно передается информация о нескольких параметрах объекта или же необходимо управлять несколькими ОУ; передатчик — преобразует управляемый параметр в сигнал, передаваемый по выбранному каналу связи; канал связи — обеспечивает передачу закодированного сигнала на требуемое расстояние. В качестве каналов связи применяют линии связи (телефонные, телеграфные, радиолинии) и линии электропередач низкого и высокого напряжения; приемник — воспринимает сигналы передатчика по каналам связи и преобразует их в сигналы для избирателя; избиратель (дешифратор) — дешифрует закодированные сигналы, переданные по каналу связи; получатель информации — измерительные, регистрирующие и сигнализирующие приборы в системах телеконтроля и исполнительные механизмы ОУ в системах телеуправления. Система элементов, обеспечивающая сбор, хранение и выдачу в каналы связи сигналов контроля параметров ОУ, а также воспринимающая сигналы управления его параметрами, представляет собой пункт контроля. Для передачи информации по каналам связи системы телемеханики используются ток или напряжение с такими качественно различными характеристиками, как полярность, амплитуда, длительность импульсов или пауз, частота или фаза сигнала.
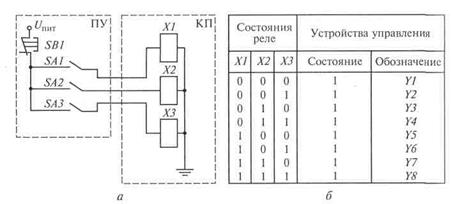
Один и тот же объем информации у можно передать либо по определенному числу п проводов канала связи, либо по одному каналу связи, увеличив число качественных признаков т сигнала, т.е. у = 2 п, или у = 2 т. По трехпроводной линии связи телеуправления (рис. 14.4, а) и только при двух признаках сигнала: «Есть сигнал» и «Нет сигнала» передается объем информации у = 2 п = 2 3 = 8 сигналам (рис. 14.4, 6), используемым, например, для управления четырьмя магнитными пускателями КМ1... КМ4 (рис. 14.4, в). По четырехпроводной линии связи передается объем информации у = 24 = 16, т.е. соответственно можно управлять 8 и 16 объектами и т.д. Такое же число сигналов можно передать по однопроводному каналу связи (КС) кодированными по частоте сигналами. Например, четырьмя магнитными пускателями можно управлять кодированными по частоте сигналами (рис. 14.4, г), используя три генератора частоты GF1... GFЗ (качественный признак сигнала т = 3). Тогда у = 23= 8. Однако при этом необходимо декодировать сигналы, переданные по каналу связи, с помощью фильтров частоты UF1...UFЗ. Увеличивая число генераторов, можно соответственно передавать 16, 32 и более сигналов. В обоих рассмотренных схемах ТУ (см. рис. 14.4, а, в) сначала с помощью ключей SА1...SАЗ набирают код сигнала у, а затем нажатием кнопки SВ1 этот сигнал передается на КП.
Рис. 14.4. Схема ТУ по трехпроводной линии связи (а), таблица состояний устройств управления (б), пример управления четырьмя магнитными пускателями (в) и схема ТУ кодированными по частоте сигналами (г)
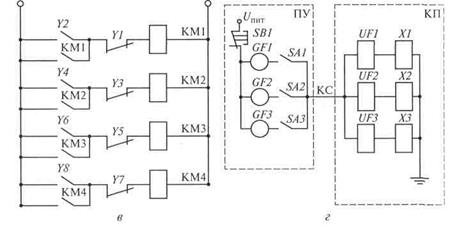
В системах телемеханики стремятся к уменьшению числа каналов связи из-за их высокой стоимости и материалоемкости, поэтому для увеличения количества передаваемой информации используют увеличение числа качественных признаков сигналов. В основном применяют сигналы, различающиеся по частоте или длительности импульсов и пауз. При частотном способе разделения сигналы по линии связи передаются параллельно или последовательно, а при времяимпульсном (по длительности импульсов или пауз) — только последовательно. С помощью систем телеизмерения производят дистанционное измерение электрических и неэлектрических величин. Телеизмерение осуществляется без непосредственного участия человека и может быть использовано для контроля, регистрации, сигнализации о состоянии ОУ и управления (регулирования) его параметрами. В небалансных системах ТИ (рис. 14.5, а) измеряемый параметр х преобразуется первичным измерительным преобразователем (ПИП) в угол поворота α п подвижной щетки потенциометра (П), которому пропорционально напряжение U1 передаваемое по каналу связи и фиксируемое измерительным прибором (ИП). Так как канал связи обладает сопротивлением Rк.с, то при передаче происходит потеря информации. Чем длиннее канал связи, тем больше потери информации. Увеличить расстояние передачи информации позволяют балансные системы ТИ (рис. 14.5, б), в которых непрерывно сравниваются напряжения U1 и U2. На приемной стороне линии связи установлены автоматический потенциометр (АП) и нуль-орган (Н-О), фиксирующий отсутствие тока в линии, что происходит при U1 = U2. При появлении тока в линии нуль-орган воздействует на АП до тех пор, пока не установится положение, при котором U1 = U2. Значение напряжения U2, отображаемое на шкале потенциометра АП, пропорционально значению измеряемого параметра х. Для измерения параметров величин ОУ на больших расстояниях используют времяимпульсные или частотные системы ТИ. Во времяимпульсных системах измеряемый параметр преобразуется в интервалы времени, а в частотных — в частоту. При этом на приемной стороне линии связи происходит обратное преобразование импульсов, пауз или частот соответственно в напряжение или ток, отображаемые аналоговыми приборами, или в число импульсов при цифровом отсчете.
Несмотря на одинаковое построение систем телеуправления и телесигнализации назначение их различно: система ТУ предназначена для управления параметрами ОУ, и сигналы в ней передаются от ПУ к ОУ; система ТС предназначена для контроля параметров ОУ, и сигналы в ней передаются от ОУ к ПУ. В системах ТУ и ТС применяют следующие виды управления: двухступенчатое, иерархическое (многоступенчатое), циркулярное и циклический опрос ОУ. При двухступенчатом управлении в системах ТУ диспетчер с помощью ключей SА1...SАЗ (см. рис. 14.4, a, в) на пульте пункта управления выбирает требуемый ОУ, а затем посылает команду «Включить» или «Отключить» с помощью общего ключа (кнопки) SВ1. В системах ТС функции диспетчера выполняют автоматические устройства, которые могут быть расположены как на пульте ПУ, так и на пульте КП. Двухступенчатость уменьшает вероятность неправильной посылки команды. На ПУ должна быть предусмотрена либо местная, либо поступившая с КП сигнализация о выбранном объекте, подтверждающая выполнение подготовительной операции. Иерархическое управление основано на разделении информации по определенным уровням, что позволяет создать многоступенчатые системы ТУ и ТС. Информация, возникающая на каждой ступени, почти полностью замыкается в пределах этой ступени, и лишь часть ее передается на более высокую ступень. Самая нижняя ступень — это местные системы автоматики, которые самостоятельно воздействуют на ОУ. С контролируемых пунктов информация поступает на пункт управления, где она обобщается, а уже затем передается на центральный диспетчерский пункт (ЦДП). На нижестоящие ступени управления ЦДП также могут поступать обобщенные команды. Циркулярное управление характеризуется одновременной передачей информации для многих объектов, т. е. по одной команде происходит управление многими объектами. При циклическом опросе на КП поочередно передается информация о состоянии отдельных ОУ или групп ОУ. Циклический опрос проводится периодически по мере необходимости или автоматически по заданной программе. Системы ТС получают следующие сигналы: о состоянии ОУ и самих систем телемеханики, подтверждающих выполнение команды, поданной с ПУ (известительная сигнализация); о выходе измеряемого параметра за заранее установленные пределы (предупредительная и аварийная сигнализации). В системах ТМ наиболее перспективны цифровые способы передачи информации. При удаленности ОУ от ПУ на 0, 2... 1, 0 км используют многопроводные каналы связи и параллельное кодирование передаваемых сигналов, при удаленности на 2...5 км — четырехпроходные линии связи и параллельно-последовательное кодирование, а при удаленности более чем на 5 км — двухпроводные линии связи и последовательное кодирование сигналов. Линии связи В системах передачи информации (и в системах телемеханики, в частности) основным элементом является линия связи. Именно в линии связи передаваемый сигнал подвергается наибольшим искажениям за счет воздействия естественных (а иногда и искусственно созданных) помех или шумов от самых различных источников. Уровень шумов в линии связи принято характеризовать отношением мощности сигнала к мощности шума Рс/Рш, определяемым в децибелах. Обычно на выходе линий связи это отношение составляет 20...30 дБ. По мере прохождения сигнала по линии связи его мощность из-за наличия активных потерь уменьшается, т.е. линия связи вызывает определенное затухание сигнала. Затухание численно определяет, во сколько раз уменьшается мощность сигнала при прохождении его по линии связи определенной протяженности. Для измерения затухания используют логарифмическую единицу отношения непер (Нп). Затухание 1 Нп/км означает, что мощность сигнала при прохождении 1 км уменьшается в е = 2, 72 раза. Чем меньше затухание в линии связи, тем на большее расстояние можно передать по ней сигнал без дополнительного усиления, т.е. тем больше дальность действия линии связи. Как уровень шумов, так и затухание в линии связи не одинаковы на различных частотах. Поэтому для передачи сигналов выбирают такие диапазоны частот, на которых мощность шумов и затухание имеют минимальные значения. Диапазон частот, в котором обеспечивается передача сигналов при заданных уровне шумов и затухании, называется полосой пропускания Δ f линии связи. Наиболее полно линия связи характеризуется информационными параметрами и прежде всего пропускной способностью. Под пропускной способностью понимают максимальное количество информации, которое можно передать по линии связи в единицу времени без ошибок. Пропускная способность определяется по формуле Шеннона, бит/с:
С=Δ Flog2(1 + Рс/Рш).
Таким образом, увеличить пропускную способность линии связи можно расширением полосы пропускания Δ f, увеличением мощности сигнала Рс и снижением мощности шума Рш. Рассмотрим основные виды линий связи. Практически во всех системах телемеханики применяются электрические линии связи, в которых для передачи сообщений используются электромагнитные колебания. Для работы под водой находят применение акустические линии связи. Электрические линии связи принято делить на две большие группы: проводные и беспроводные, а проводные линии, в свою очередь, подразделяются на воздушные и кабельные. Воздушные линии связи — это стальные, медные или биметаллические провода, с помощью изоляторов прикрепленные к опорам. Уровень шумов и затухание в таких линиях довольно высоки, поэтому полоса пропускания их составляет 150... 160 кГц. Надежность воздушных линий также низкая. Значительно более высокие характеристики имеют подземные кабельные линии связи. Полоса пропускания подземных симметричных кабельных линий достигает 1 МГц, коаксиальных — 50 МГц и более. Благодаря широкой полосе пропускания и высокой надежности кабельные линии широко применяются для обеспечения дальней связи, хотя стоимость их сравнительно высока. Для компенсации затухания сигнала при передаче его на большие расстояния через каждые несколько десятков километров в линию включают промежуточные усилители. В настоящее время в кабельных линиях связи стало возможным использование оптического диапазона за счет применения лазеров и волоконной оптики. Это резко повышает полосу пропускания кабельных линий. Для снижения стоимости телемеханических систем в качестве линий связи стремятся использовать линии, предназначенные для других целей. Так, широкое применение для передачи сигналов телемеханики находят линии электропередачи, которые кроме выполнения своей основной функции — передачи электрической энергии постоянного или переменного тока промышленной частоты 50 Гц обеспечивают передачу сигналов телемеханических систем на частотах от 30 до 500 кГц. При этом используется специальная аппаратура подсоединения и обработки (АПО). В качестве линий связи в телемеханике используют также контактные сети, предназначенные для электрического транспорта. Для передачи телемеханических сигналов на большие расстояния в целях управления подвижными объектами и в космических системах применяют беспроводные линии связи: радио и лазерные. Для передачи сигналов телемеханики по радиолиниям используют диапазон дециметровых волн (от 300 до 3000 МГц), в котором достаточно низкий уровень шумов. Для увеличения дальности действия сигнала и уменьшения помех в передатчиках и приемниках радиолинии используют остронаправленные антенны. Практически радиоволны дециметрового диапазона могут использоваться только в пределах прямой видимости, которая ограничена кривизной земной поверхности. Поэтому передачу сигналов
на большое расстояние осуществляют по радиорелейным линиям (рис. 14.6), устанавливая между передатчиком и приемником через каждые 40...60 Огромными возможностями обладают лазерные линии связи, в которых может использоваться чрезвычайно широкий диапазон частот от радиоволн до видимого света (105...2, 3 • 1018 Гц). Излучения этого диапазона довольно быстро затухают в земной атмосфере, поэтому применение беспроводных лазерных линий связи наиболее перспективно для космических систем, а в земных условиях они используются только на расстоянии не более десятка километров. В настоящее время специальные линии связи, предназначенные только для передачи телемеханической информации, используются лишь при небольших расстояниях между ПУ и КП (например, в пределах одного предприятия), а также для управления подвижными объектами. В линиях связи и сетях связи общего назначения для передачи сигналов систем телемеханики предоставляются в основном каналы двух типов: телефонные (тональной частоты — ТЧ) и телеграфные (тональноготелеграфирования — ТТ), параметры которых стандартизированы. Диапазон пропускаемых частот телефонного канала от 300 до 3400 Гц, телеграфного — от 0 до 120 Гц. Для высокоскоростных систем передачи данных могут предоставляться широкополосные каналы с полосой пропускания до 12 МГц и более, параметры которых также стандартизированы. Устройства телемеханики могут занимать (или абонировать) каналы связи постоянно либо лишь на время передачи сигнала. В первом случае канал называется выделенным, во втором — коммутируемым. В зависимости от возможного направления передачи сигналов различают каналы симплексные (сигналы передаются в одном направлении), дуплексные (возможна передача сигналов в обоих направлениях одновременно) и полудуплексные (направление передачи сигналов может быть изменено в любой момент времени). Использование стандартных каналов связи, естественно, требует унификации и стандартизации как самих телемеханических устройств, так и сигналов, несущих информацию.
14.4. Методы преобразования сигналов Электрические сигналы, подлежащие передаче в системах телемеханики, в большинстве случаев лежат в низкочастотной части спектра (в диапазоне от нуля до нескольких десятков герц). Непосредственная передача этих сигналов между ПУ и КП иногда используется в так называемых системах интенсивности, но дальность действия подобных систем ограничена и редко превышает несколько десятков метров, так как низкочастотные сигналы наиболее сильно подвержены воздействию помех при передаче их на большие расстояния. Так как полоса пропускания воздушных линий связи обычно начинается от 0, 5 кГц, для согласования низкочастотного сигнала с высокочастотной линией связи производят перенос спектра передаваемого сигнала в высокочастотную область. Для этого низкочастотный сигнал приводят в однозначное соответствие с одним из параметров высокочастотного колебания, называемого несущим. Такое преобразование спектра называют модуляцией, а устройство, осуществляющее модуляцию, — модулятором. Существуют непрерывные, импульсные и цифровые методы модуляции. Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 4501; Нарушение авторского права страницы