|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Экспериментальное определение динамических характеристик объектов регулирования
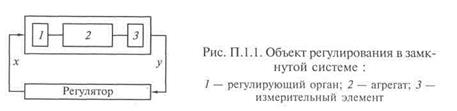
Наиболее достоверные динамические характеристики действующих промышленных объектов могут быть получены экспериментальным путем. Эти объекты представляют собой, как правило, многоемкостные системы с различными сопротивлениями, запаздываниями и нелинейными зависимостями, поэтому аналитически определить их динамические свойства по конструктивным и физическим данным весьма сложно. Методы определения. При экспериментальном определении динамических свойств объекта анализируют характер переходного или установившегося колебательного процесса, вызванного специально внесенными на вход объекта возмущениями либо случайными эксплуатационными возмущениями. В первом случае используют, как правило, три типа возмущений: однократное скачкообразное возмущение, которому соответствует переходный процесс, называемый кривой разгона (или временной характеристикой); однократное импульсное возмущение, которому соответствует переходный процесс, называемый импульсной характеристикой (или функцией веса); периодические возмущения, повторяющиеся с определенной частотой, которым соответствует установившийся процесс колебаний выходной величины; по кривым изменения входной и выходной величин определяют частотные характеристики объекта. Во втором случае динамические характеристики определяют путем статистического анализа кривых изменения во времени обычных эксплуатационных значений входной и выходной величин объекта без внесения специальных возмущений. Однако обработка громоздкого экспериментального материала требует больших усилий, поэтому этот метод не может быть рекомендован для широкого практического использования. При выборе метода экспериментального определения динамических свойств объекта следует исходить из характера поставленной задачи, условий проведения опытов, допустимых по технологическим требованиям отклонений исследуемой выходной величины объекта и характера случайных эксплуатационных возмущений. Так, кривые разгона можно получить проще и быстрее, чем частотные характеристики, однако в этом случае отклонения выходной величины от номинального значения обычно значительнее, и случайные эксплуатационные возмущения больше искажают результаты. Следовательно, для выбора регулятора и его настроек вполне достаточно кривых разгона объекта, а для исследования его устойчивости удобнее использовать частотные характеристики. Необходимо также иметь в виду, что теория автоматического регулирования позволила создать достаточно простые и достоверные приближенные методы взаимного перестроения этих двух характеристик объекта. Таким образом, если условия проведения опытов на агрегате обусловливают метод определения динамических характеристик, полученные результаты обычно можно представить в форме, наиболее удобной для решения поставленной задачи. При исследовании сложного, многомерного объекта, переходный процесс в котором зависит от различных физических величин, динамические свойства объекта следует определять отдельно по каждой из этих величин. Таким образом, многомерный объект рассматривается как совокупность соответствующего числа одномерных объектов, переходные процессы в которых протекают независимо друг от друга. При этом предполагают, что перекрестные связи в агрегатах и процессах либо вовсе отсутствуют, либо незначительны, и в первом приближении ими можно пренебречь. Так, конечно, бывает не всегда, но в большинстве случаев это справедливо. Поэтому на реальных объектах практически всегда исследуют какой-либо определенный участок от регулирующего органа до места измерения соответствующей выходной величины. Объектом регулирования в дальнейшем будем называть (кроме тех случаев, где это специально оговорено) сложное динамическое звено, в сочетании с которым работает регулятор. В это звено входят рассматриваемый участок агрегата, чувствительный элемент и все средства измерения выходной величины, а также регулирующий орган, изменяющий поступление регулирующей среды по команде регулятора (рис. П1.1). Для того чтобы выбрать регулятор и его настройки, необходимо знать динамические свойства именно такого звена системы регулирования, так как совокупность свойств всех его элементов определяет условия работы регулятора. Поэтому регулятором мы будем называть собственно регулирующее устройство, вырабатывающее по определенному закону регулирующее воздействие и реализующее его через исполнительный механизм. Таким образом, входной величиной объекта является положение регулирующего органа, следовательно, возможная нелинейность его характеристики будет отражена в характеристиках объекта. Разумеется, следует рассматривать лишь те регулирующие органы, которые войдут в систему автоматического регулирования. Принять положение регулирующего органа в качестве входной величины целесообразно еще и потому, что его же рассматривают обычно и как выходную величину регулятора. Это упрощает в дальнейшем расчеты.
Объект регулирования Однако, так как неправильно выбранные и рассчитанные регулирующие органы могут ухудшить характеристики объекта и условия работы регулятора, целесообразно наряду с положением регулирующего органа рассматривать и регистрировать входную величину собственно агрегата, т.е. расход регулирующей среды (греющей или охлаждающей жидкости в теплообменных аппаратах; топлива в печах и котлах; воздуха при регулировании процесса горения; жидкости при регулировании уровня и т.п.). Это позволит выявить необходимость замены неудачно выбранных регулирующих органов. Нелинейность объекта', перекрестные связи. Большинство реальных промышленных объектов не являются строго линейными, что всегда следует иметь в виду при изучении их динамических характеристик. Динамические и статические свойства объекта, как и других звеньев и системы регулирования в целом, характеризуются определенными параметрами — коэффициентами передачи, постоянными времени и др. Нелинейными являются объекты (звенья, системы), параметры которых изменяются при изменении состояния объекта — режима его работы, нагрузки и т.п. Статические характеристики объекта, иллюстрирующие связи между значениями его входных и выходных величин в установившихся состояниях, будут в этом случае нелинейными, а дифференциальные уравнения переходных процессов (динамические характеристики) будут представлять собой нелинейные дифференциальные уравнения, коэффициенты которых зависят от значений переменных. Нелинейность, если она существенная, приводит к часто наблюдаемому изменению экспериментальных динамических характеристик объектов, особенно при больших возмущениях или значительных изменениях нагрузки объекта. Поэтому определение динамических характеристик объектов, технологическим режимам которых свойственны широкие диапазоны изменения нагрузки, следует проводить при различных режимах (хотя бы при двух видах нагрузки — высокой и пониженной). Сравнение полученных при этом результатов позволит оценить степень нелинейности объекта и допустимые пределы линеаризации его характеристик. На объектах с узким диапазоном изменения нагрузки обычно достаточно провести опыты при номинальном режиме. В отдельных случаях выходная величина объекта, характеризующая состояние агрегата и ход технологического процесса, может зависеть вследствие наличия перекрестных связей от нескольких входных величин. Тогда необходимо провести опыты с возмущениями по каждой из этих величин отдельно. Полученные результаты позволят оценить степень зависимости между этими величинами. Следовательно, в ходе опытов по определению динамических характеристик целесообразно контролировать, а иногда и регистрировать изменения во времени не только входной и выходной величин объекта, но и тех величин, изменение которых может сказаться на характере переходного процесса. Так, например, исследуя изменение уровня воды в барабане парового котла, при возмущении по расходу воды следует регистрировать также изменения паровой нагрузки и давления пара в барабане, а при возмущении по расходу пара — расход воды; при определении кривой разгон
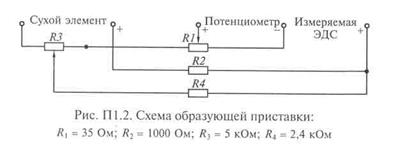
Средства измерения. В опытах по определению динамических характеристик важен правильный выбор средств измерения и регистрации входных и особенно выходных величин. Если на объекте уже установлена определенная система автоматического регулирования, то для измерения выходной величины следует использовать те измерительные приборы, которые входят в данную систему. В этом случае определяют и затем используют для расчета общие характеристики звена, включающего в себя объект, импульсные линии и измерительный прибор, сигнал от которого поступает на регулятор. Регистрация изменения входной величины объекта, как правило, не вызывает затруднений. Ее можно производить либо при непосредственном наблюдении, определяя момент внесения возмущения и его величину по указателю положения регулирующего органа, либо по приборам, измеряющим расход соответствующей регулирующей среды. При исследовании быстро протекающих процессов целесообразно снабжать регулирующие органы электрическими датчиками и регистрировать изменения автоматически. При регулировании сравнительно медленно протекающих процессов (изменений температуры, влажности и др.) выходные (и входные) величины объекта рекомендуется регистрировать с помощью обычного многоточечного прибора, например типа потенциометра ЭПП-09. В общем случае достаточно установить для этого на потенциометре время цикла 5 или 3 с и скорость перемещения диаграммной бумаги до 1440 мм/ч. Для увеличения масштаба записи измеряемой величины рекомендуется использовать потенциометр с нестандартной градуировкой шкалы (с пределами измерения 2 или даже 1 мВ). При измерении величины таким узкопредельным прибором необходимо «подавить» его нерабочий диапазон. Это можно осуществить, подключив стабилизированный источник тока (сухой элемент) навстречу измеряемой ЭДС через делитель напряжения У?.? специальной приставки (рис. П1.2). Наряду со значительным увеличением масштаба записи при этом повышается точность измерения. Для изменения масштаба регистрации служит реостат К1 приставки. После прикидочных опытов масштабы регистрации можно скорректировать.
Такая регистрация обычно позволяет получать диаграммы, пригодные для непосредственной обработки без дополнительных перестроений. При этом сигнал можно подавать параллельно на регистрирующий и стационарный измерительный приборы. При определении динамических характеристик объектов с быстро протекающими процессами для измерения таких величин, как давление, разрежение или расход в трубопроводах, в качестве первичных промышленных измерительных приборов с электрическим сигналом на выходе рекомендуется использовать быстродействующие мембранные компенсационные и колокольные дифманометры. Регистрацию измеряемых величин рекомендуется проводить в этих случаях на шлейфовом осциллографе (например, типа МПО-2) при скорости перемещения ленты или бумаги 4... 10 мм/с. Неправильный выбор чувствительных элементов и другой аппаратуры измерения выходной величины так же, как и регулирующих органов, может привести к искажению действительных динамических характеристик агрегата. Поэтому при проектировании системы автоматического контроля и регулирования (когда еще методы и аппаратуру измерения только предстоит выбрать) целесообразно определять динамические свойства агрегата в «чистом» виде — без искажения их измерительной аппаратурой. К выбору средств измерения и регистрации для подобных опытов необходимо подходить особенно строго. Все измерительные приборы, состоящие из чувствительных элементов, усилителей и регистрирующих устройств, являются сложными динамическими системами, и их точность определяется также и динамическими свойствами. Поэтому при измерении нестационарных физических величин необходимо наряду с обычными статическими ошибками измерительной аппаратуры учитывать и ее частотный диапазон, т.е. диапазон частот, в котором динамическая ошибка измерения не превышает допустимого значения. При выборе чувствительных элементов для измерения температуры пламени и газообразных сред следует иметь в виду, что контактные методы обладают значительно большей инерционностью, чем методы оптической пирометрии. Чувствительные элементы оптических пирометров являются оптико-электрическими системами, инерционность которых практически ничтожна. Их частотный диапазон при промышленных измерениях практически неограничен. Применяемые при измерениях усилители электрических сигналов чувствительных элементов, имеющие высокий коэффициент усиления и широкий частотныйдиапазон, также не вносят заметных искажений. Звеном, вносящим динамическую погрешность, в этих случаях может оказаться регистрирующее устройство, если это обычные промышленные регистрирующие приборы (электронные потенциометры, мосты и др.). Однако этой ошибки можно практически полностью избежать, если воспользоваться для регистрации выходного сигнала шлейфовым или электронно-лучевым осциллографом. Для измерения температуры нагрева металла, температуры рабочего пространства или других медленно изменяющихся температур объектов с большой тепловой емкостью можно использовать контактные методы с такими чувствительными элементами, как термопары, термометры сопротивления и манометрические термометры в защитных чехлах. Во многих случаях вносимые ими динамические погрешности невелики. Если же погрешности значительны, их можно исключить, зная динамические характеристики этих чувствительных элементов. Аналогичные требования к динамике измерения предъявляются и при определении характеристик объекта по влажности, концентрации, со-лесодержанию и другим физическим величинам, которые изменяются относительно медленно. Измерение нестационарных давлений можно производить чувствительными элементами с упругими мембранами и датчиками электрических сигналов на выходе. Верхний предел частотного диапазона неискаженных измерений в этом случае определяется собственной частотой колебаний чувствительного элемента (может быть принят порядка 105 рад/с для мембранных чувствительных элементов с емкостными или тензометрическим датчиками и датчиками электрического сигнала и 104 рад/с для элементов с индукционными датчиками), т.е. практически он неограничен. Такие высокие динамические качества этих чувствительных элементов обеспечиваются при размещении их непосредственно в измеряемой среде. Импульсные линии, соединяющие объект с прибором, и другие дополнительные емкости сужают частотный диапазон неискаженных измерений, однако и в этих случаях он достаточно высок для определения динамических характеристик промышленных объектов. В мембранных приборах компенсационного типа, где положение упругой мембраны стабилизируется автоматически, динамические свойства определяются параметрами применяемой следящей системы; верхний предел частотного диапазона таких приборов, естественно, ниже. В этих случаях ошибка оценивается на основе данных о динамике этих приборов. Для измерения нестационарных давлений применяют также чувствительные элементы, изменяющие свои физические свойства при изменении давления. Наибольшее распространение из приборов этой группы получили пьезометрические измерители давления, верхний предел частотного диапазона которых достигает 2-105 рад/с. При измерении нестационарных расходов обычно используют методы определения перепадов давлений на различных сужающих устройствах, например на диафрагмах, соплах, трубках Вентури. В этих случаях динамика измерений зависит от динамических свойств приборов, применяемых для измерения давления. При этом надо учитывать, что при измерении расхода всегда будут иметь место соединительные импульсные линии и различные дополнительные емкости, снижающие верхний предел частотного диапазона прибора, поэтому чем их меньше, тем лучше. В тех случаях, когда нужно полностью исключить влияние измерительной аппаратуры, следует использовать практически безынерционные приборы: индукционные расходомеры с постоянным магнитным полем, ионизационные расходомеры с непрерывной ионизацией и ультразвуковые расходомеры (верхний предел частотного диапазона последних может достигать 105 рад/с). Регистрацию выходной величины при определении характеристик собственно агрегата по таким параметрам, как давление, разрежение и расход, следует производить только с помощью осциллографа. Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1809; Нарушение авторского права страницы

 по температуре в одной из зон многозонной нагревательной печи следует регистрировать расход топлива не только в этой, но и в соседних зонах. Это позволяет лучше контролировать стабильность условий опыта, оценивать достоверность полученных результатов, а иногда и вносить в них необходимые поправки.
по температуре в одной из зон многозонной нагревательной печи следует регистрировать расход топлива не только в этой, но и в соседних зонах. Это позволяет лучше контролировать стабильность условий опыта, оценивать достоверность полученных результатов, а иногда и вносить в них необходимые поправки.