
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение кривых разгона и импульсных характеристик
Кривой разгона отдельного элементарного звена или объекта в целом называется кривая изменения во времени выходной величины в переходном процессе, вызванном однократным и скачкообразным возмущением на входе, т.е. входной величины. При этом предполагается, что возмущение является мгновенным, а следовательно, представляет собой наиболее тяжелую форму возмущающего воздействия. Кривые разгона статического (с самовыравниванием) и астатического (без самовыравнивания) объектов приведены на рис. П1.3. Характер конкретных кривых разгона зависит от числа емкостей и сопротивлений, составляющих объект, наличия чистого (транспортного) запаздывания и степени самовыравнивания. Методика эксперимента. Для определения кривой разгона объекта, как и любого другого звена системы автоматического регулирования, рекомендуется воспользоваться схемой проведения опытов, приведенной на рис. П1.4. В опытах прежде всего необходимо добиться установившегося состояния объекта по рассматриваемой величине. Для этого перед внесением возмущения следует поддерживать постоянным или близким к этому значение выходной величины объекта путем стабилизации его входной величины, нагрузки и других величин, влияющих на рассматриваемую выходную величину. Важно также стабилизировать и новое значение входной величины после возмущения до окончания переходного процесса. До внесения возмущения установившийся режим желательно выдержать хотя бы в течение 2, 0... 2, 5 мин при измерении параметров медленно протекающих процессов (изменения температуры, влажности и т.п.) и 0, 3...0, 5 мин для более быстро протекающих процессов (изменения расхода, давления и т.п.). Значение выбранной для данной группы опытов нагрузки определяет начальные установившиеся значения выходной и входной величин объекта. Если допустимые пределы отклонения измеряемой выходной величины ограничены технологическими условиями, начальное установившееся ее значение рекомендуется принимать близким к одному из предельно до-
пустимых значений, учитывая при этом предполагаемое направление возмущения и направление изменения выходной величины с тем, чтобы иметь возможность больший диапазон ее изменения. Возмущение на входе объекта создается регулирующим органом, управляемым вручную или дистанционно. При выборе значения вносимого возмущения в каждом отдельном случае следует учитывать условия работы объекта: общий уровень случайных эксплуатационных возмущений (помех), допустимый диапазон отклонений входной и выходной величин, примерный коэффициент передачи. В общем случае при определении кривых разгона значение вносимого возмущения должно составлять 5... 15% от максимально возможного для данного режима значения входной величины. Увеличение вносимых возмущений нецелесообразно, так как это приводит к увеличению влияния нелинейности объекта и заметному нарушению технологического процесса; уменьшение же возмущений, как правило, затрудняет вьщеление кривой разгона из случайных переходных процессов (помех). Как следует из определения кривой разгона, возмущение должно вноситься мгновенно, а практически — как можно быстрее. В тех случаях, когда практически мгновенное изменение входной величины невозможно из-за большого времени перемещения регулирующего органа или исполнительного механизма (соизмеримого с запаздыванием), следует учитывать фактическое время возмущения /в перемещения регулирующего органа из начального установившегося положения в новое или изменения расхода и при внесении возмущения (рис. П1.5). Впоследствии при обработке данных эксперимента это позволит получить достаточно точную кривую разгона строго по ее определению.
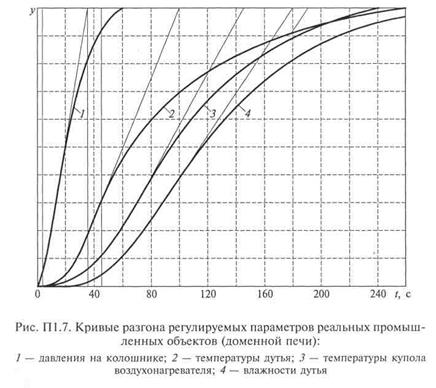
При определении кривых разгона астатических объектов, не обладающих свойством самовыравнивания, переходный процесс заканчивается при достижении установившегося значения скорости изменения выходной величины объекта; после этого можно считать опыт законченным. Для статических объектов, обладающих самовыравниванием, моментом окончания переходного процесса, а следовательно, и опыта является момент достижения нового установившегося значения выходной величины объекта. Для того чтобы получить достаточно полные данные об объекте, кривые разгона следует определять при возмущениях в обоих направлениях, причем желательно повторить опыты хотя бы по три раза для каждого из режимов. Однако в ряде случаев допустимый диапазон отклонения выходной величины ограничивается технологическими требованиями и достигнуть в ходе опыта нового установившегося ее значения невозможно. В этих случаях кривую разгона можно получить путем несложной экстраполяции начального участка переходного процесса, а также опытным путем при внесении импульсного возмущения. Строгое импульсное возмущение должно представлять собой возмущение бесконечно большой величины в бесконечно малое время. Однако практически, так как внесение подобных возмущений конечно же невозможно, импульсное возмущение (рис. П1.6) берется большим, чем в обычных опытах по определению кривых разгона, т. е. порядка 15... 25 % от максимально возможного значения входной величины. Когда выходная величина после скачкообразного изменения входной величины приблизится (с учетом выбега) к предельно допустимому значению, следует изменить входную величину в обратном направлении, т.е. установить ее первоначальное значение. Переходный процесс (и опыт) закончится в этом случае в тот момент, когда вновь установится первоначальное значение выходной величины. Обработка результатов эксперимента. Примеры кривых разгона реальных объектов регулирования приведены на рис. П1.7 (величины по оси у даны в относительных единицах).
Определим по кривой разгона параметры, характеризующие динамические свойства объекта (рис. П1.8).
1. Запаздывание. Если в точке максимальной скорости изменения выходной величины (точка Л) провести касательную ВС к кривой разгона и продолжить ее до пересечения с линией начального установившегося значения выходной величины (точка В), то отрезок времени от момента внесения возмущения до точки пересечения касательной с осью (отрезок ОВ) определит общее (суммарное) запаздывание объекта т, которое складывается из чистого (транспортного) и емкостного (переходного) запаздываний. Поскольку решение основных практических задач при расчете систем регулирования не требует разделения этих составляющих, далее будем использовать только суммарное значение, называя его запаздыванием объекта. 2. Постоянная времени. Отрезок времени от момента пересечения касательной с линией начального установившегося значения до момента ее пересечения с линией нового установившегося значения (отрезок ВС) называется постоянной времени объекта Т0. Постоянная времени — это условное время изменения выходной величины от начального до нового установившегося значения, если бы это изменение происходило со скоростью постоянной и максимальной для данного переходного процесса. Очевидно, что постоянная времени имеет место лишь у статических объектов. Кривые разгона объектов управления с самовыравниванием представляют собой в общем случае 8-образные кривые, ибо это, как правило, объекты второго или более высоких порядков (т.е. переходные процессы в таких линейных или линеаризованных объектах описываются дифференциальными уравнениями второго или более высокого порядка). Оценка динамических свойств таких объектов лишь постоянными т и Т0 объясняется тем, что практически такие сложные объекты можно аппроксимировать с достаточной степенью точности двумя последовательно включенными элементарными звеньями: звеном с чистым запаздыванием т и звеном первого порядка с постоянной времени Т0 (рис. П1.9).
Дифференциальное уравнение звена с чистым запаздыванием можно записать в виде
Кривая разгона такой аппроксимирующей системы элементарных звеньев — это экспонента с постоянной времени Т09 смещенная относительно начала координат (момента внесения возмущения) на значение запаздывания т. Очевидно, что для объектов, близких к первому порядку, расхождение реальных и аппроксимированных подобным образом кривых разгона не может быть существенным. Для большого числа реальных объектов регулирования (температуры, влажности и т.п.) переходные процессы могут быть описаны с большей точностью лишь уравнениями второго порядка:
Т22 у" + Т1у' + у = кх,
где Т1 и Т2 — постоянные времени. Для большинства промышленных объектов показатель демпфирования (степень затухания) Т1/Т2 в этих случаях обычно более двух. Следовательно, переходный процесс не носит колебательного характера, и кривая разгона в этом случае с достаточной точностью также может быть аппроксимирована отрезком времени чистого запаздывания т и экспонентой (рис. П1.10). 3. Коэффициент передачи. Для статического объекта коэффициент передачи k0 представляет собой изменение его выходной величины при переходе из начального в новое установившееся состояние, отнесенное к единичному возмущению на входе. Единичным возмущением будем считать 1 % хода регулирующего органа или единицу измерения расхода регулирующей среды.
Таким образом, коэффициент передачи объекта (см. рис. ШЛО) определяется по кривой разгона следующим образом:
где у(0) — значение выходной величины в начальном установившемся состоянии; у(∞ ) — то же, в новом установившемся состояния; Δ х — величина вносимого возмущения на входе (в процентах от хода регули- • рующего органа). Для данного примера k = 6. Свойство самовыравнивания статических объектов, т.е. их способность восстанавливать нарушенное при возмущении равновесие и стремление выходной величины к новому установившемуся значению, в некоторых случаях оценивают не коэффициентом передачи, а так называемой степенью самовыравнивания р, представляющей собой отношение изменения входной величины к изменению выходной. При этом обычно используют относительные значения этих величин: входную величину — по отношению к полному ходу регулирующего органа или расходу регулирующей среды, а выходную — к максимально возможному по технологическому режиму заданному значению выходной величины. Таким образом, коэффициент самовыравнивания
где у3 — заданное значение выходной величины.
Кривые разгона астатических объектов первого и второго порядков показаны на рис. Ш.11. Пересечение касательной, проведенной к кривой в точке максимальной скорости изменения выходной величины, с линией начального установившегося значения определяет запаздывание объекта т. Для астатических объектов также можно условно считать коэффициентом передачи установившееся значение скорости изменения вы выходной величины при единичном возмущении.
Тангенс угла наклона касательной к оси абсцисс \%а определяет скорость изменения выходной величины у при данном возмущении входной величины Ах. Тогда коэффициент передачи астатического объекта
Так по экспериментальным кривым разгона определяют параметры, характеризующие динамические свойства объекта: запаздывание τ, постоянную времени Т0 и коэффициент передачи k. Если статическим объектом по условиям проведения опыта не было достигнуто новое установившееся состояние и при этом зарегистрирована лишь начальная часть кривой разгона, то эта часть кривой может быть экстраполирована (рис. П1.12): на экспериментальной кривой следует выбрать две точки и определить для равных отрезков времени Δ t соответствующие отрезки Δ у1 и Δ у2. Отложив от вертикальной прямой EE' отрезки, равные Δ t1 и Δ t2, как показано на рис. П1.12, через точки С и С' провести прямую AВ до пересечения с ЕЕ'. Отрезок ВЕ определит новое установившееся значение выходной величины, что позволит найти постоянную времени и коэффициент передачи объекта. Если запаздывание объекта соизмеримо с временем нарастания возмущения tв, то при определении значения т следует заменить истинное возмущение типовым скачкообразным (рис. П1.13). Момент внесения скачкообразного возмущения условно выбирают при равных площадях треугольников F1 и F2. Для наиболее распространенного случая равномерного нарастания возмущения
ПРИЛОЖЕНИЕ 2 Выбор регуляторов Основным вопросом при выборе регуляторов является вопрос правильности определения характеристики регулятора применительно к динамическим свойствам объекта. При отсутствии регулятора внесенное возмущение вынуждает регулируемую величину объекта изменяться по некоторой кривой, определяемой свойствами данного объекта. Максимальное отклонение регулируемой величины в этих условиях зависит от значения возмущения
где р — коэффициент, отражающий свойства объекта; λ 0 — значение возмущающего воздействия. Продолжительность отклонения регулируемой величины определяется временем действия возмущения на объект. Если включить регулируемый объект в систему регулирования, то можно уменьшить абсолютное значение отклонения σ mах и время, в течение которого это отклонение будет продолжаться. Однако регуляторы с различными характеристиками обеспечивают разные результаты регулирования, что вызывает необходимость их выбора в соответствии со свойствами регулируемого объекта. При правильно выбранном регуляторе и соответствующей его настройке степень затухания процесса регулирования должна быть примерно равна 0, 75 (при этом значении обеспечивается наиболее благоприятное изменение регулируемой величины). Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 5159; Нарушение авторского права страницы









 ,
, 





