
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
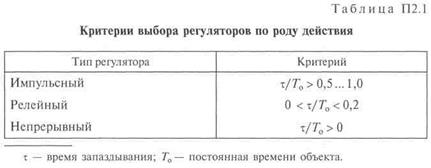
Выбор регуляторов на основании ориентировочных сведений о проектируемом объекте
При отсутствии сведений о динамических свойствах проектируемого объекта выбор регуляторов следует производить по аналогии с действующими объектами или же на основании предположительных соображений о свойствах данного объекта, учитывая при этом критерии, приведенные в табл. П2.1.
Импульсные регуляторы применяются для объектов без большого запаздывания, обладающих средней емкостью, при постоянной или плавно и мало меняющейся нагрузке и соблюдении условия
Эти регуляторы применяются также для объектов с одной емкостью, не обладающих свойством самовыравнивания. Хорошая работа двухпозиционных регуляторов во многом зависит от инерционности чувствительного элемента, которая должна соответствовать инерционности объекта. Для двух- и более емкостных объектов двухпозиционное регулирование применяется редко: только в тех случаях, когда не требуется большая точность поддержания регулируемой величины. И-регуляторы применяются для объектов с самовыравниванием, небольшим запаздыванием, имеющих любую мощность, при медленно меняющейся нагрузке. Для получения оптимального переходного процесса в системе астатического регулирования необходимо выполнение следующих условий: объект должен быть статическим; постоянная времени объекта Т0 должна быть в пределах 2...40 с; время емкостного запаздывания процесса в системе регулирования должно скорость перемещения регулирующего органа и коэффициент усиления регулятора должны выбираться в соответствии с емкостью объекта. Также И-регуляторы с постоянной скоростью хорошо работают в объектах регулирования уровня, давления и температуры, но при обязательном условии, что чистое запаздывание т и время разгона Т0 малы, а постоянная времени объекта Т0 составляет не более 30...40 с. При этом чем больше емкость объекта, тем больше должна быть скорость перемещения регулирующего органа, а следовательно, и скорость регулирования.
И-регулятор с постоянной скоростью перемещения регулирующего органа может применяться только при наличии у него некоторой зоны нечувствительности; в этом случае регулирование становится устойчивым, что достигается также при условии
При этом чем меньше ТП, тем больше должна быть зона нечувствительности Δ. Устойчивое регулирование И-регулятор обеспечивает при условии
где R — коэффициент сопротивления (по выходу); С — коэффициент емкости объекта. При регулировании уровня воды в баке коэффициент сопротивления
где H — уровень воды; Q— расход воды. При регулировании температуры жидкости в баке коэффициент сопротивления
где tп — потенциальное значение температуры; Q0 — количество теплоты, вносимое в объект; Qs — количество теплоты, уносимое из объекта. П-регуляторы применяются в объектах со средней емкостью, небольшим запаздыванием и при небольших изменениях нагрузки. Большей частью они применяются для одноемкостных объектов, реже для двухъемкостных. Для многоемкостных объектов пропорциональные регуляторы применяются ограниченно. П-регуляторы могут обеспечить устойчивое регулирование объекта с самовыравниванием при условии
где кр и к0 — соответственно коэффициенты передачи регулятора и объекта; σ ст — статическая ошибка, и объекта без самовыравнивания при условии
ПИ-регуляторы применяются в объектах с любой емкостью, большим запаздыванием и при большой, но медленно меняющейся нагрузке. Для объектов многоемкостных эти регуляторы применяются при τ > > 0, 1Tо. ПД-регуляторы применяются в объектах со средней емкостью, при большом времени запаздывания и при малых изменениях нагрузки. ПИД-регуляторы применяются в объектах с любой емкостью, очень большим запаздыванием и при больших и резких изменениях нагрузки. Эти регуляторы нецелесообразно применять для объектов, в которых τ /T0 > -1. Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1391; Нарушение авторского права страницы

 составлять не более 1/10 от постоянной времени объекта, т.е.
составлять не более 1/10 от постоянной времени объекта, т.е.




