|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структура АСР и ее основные элементы.Стр 1 из 9Следующая ⇒
Структура АСР и ее основные элементы. По виду используемой энергии различают АСР: механические, гидравлические, пневматические, электрические, комбинированные. Регулятор, выполняя свои функции, должен перемещать регулировочные органы (РО) в требуемом направлении, для обеспечения устойчивого движения системы. При этом нередко для перестановки РО требуются затраты значительной мощности, которую не могут развить регуляторы. В таких случаях в составе АСР предусматривают усилительные устройства, которые включают в передаточный механизм между регулятором и РО. Усилители воспроизводят все указания от регулятора, и мощность сигнала от них должна быть достаточной для необходимого перемещения регулировочных органов. Автоматическое регулирование без участия усилителей называется прямым регулированием, а при наличии их в передаточном механизме - непрямым регулированием.
Рис. 1.4 Схема прямого (а) и непрямого регулирования (б) турбин. РС- регулятор скорости, ПЗ- промежуточный золотник, СМ-сервомотор, РО- регулировочные органы (клапаны) турбины.
АСР с использованием электрической энергии нашли широкое применение для котельного оборудования и вспомогательных установок на ТЭС (Рис. 1.5)
Рис 1.5 Схема электрической системы регулирования. Д-датчик, в состав которого могут входить преобразователь энергии и чувствительный элемент: давления, температуры, расхода, других регулируемых величин; ЗД-задатчик, с помощью которого устанавливают заданное значение регулируемого параметра. УОС-устройство внутренней обратной связи, предназначенной для стабилизации процесса регулирования, его сигнал направлен навстречу хвх; ИБ-измерительный блок, производит алгебраическое суммирование сигналов, поступающих от датчика и задатчика; КУУ-командно - усилительное устройство; ИМ-исполнительный механизм. Примером использования в АСР комбинированного вида энергии является система регулирования турбины, в которой установлен электрогидравлический преобразователь для преобразования электрического сигнала от регуляторов энергосистемы (корректора частоты, противоаварийной автоматики, регулятора обменной мощности) в гидравлический сигнал для гидравлической системы регулирования турбоагрегата.
Переходные процессы в АСР. Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров Виды переходных процессов в АСР при единичных ступенчатых воздействиях
Рис. 1.6 Переходные процессы в устойчивых АСР. а) – при управляющем воздействии, б) – при возмущающем воздействии.
Для устойчивых АСР переходные процессы сходящиеся, т.е.
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР может находится на границе устойчивости, когда регулируемый параметр не принимает заданного значения и его отклонения имеет постоянную амплитуду отклонения от заданного значения (Рис. 1.7, б). При том или ином воздействии требуемые и действительные значения регулируемой величины могут отличаться друг от друга. Разность между заданным
Рис. 1.8 Ошибки и отклонения для АСР.
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение.
Примеры составления уравнений объектов регулирования. Уравнения ротора турбины. На ротор турбоагрегата действует с одной стороны- вращающий момент, обусловленный движущими силами на лопатках турбины, расходом пара в проточную часть турбоагрегата, а с другой –момент сил сопротивления со стороны генератора, для привода которого служит турбина (Рис.4.1). Рис. 3.1. Паровая конденсационная турбина 1- регулировочные клапаны, 2- турбина, 3- генератор, 4- конденсатор.
При установившемся режиме работы турбогенератора ротор вращается равномерно с постоянной скоростью, что возможно только при равенстве моментов сил Мт- движущих сил и Мг-сил сопротивления. Мт0-Мг0=0, (3-19) Индекс нуль соответствует установившемуся движению. В процессе регулирования равенство моментов сил может нарушаться, например, из-за изменения давления пара перед турбоагрегатом, расхода пара в проточной части турбины, изменения электрического сопротивления приборов и агрегатов, подключенных к генератору. Для неустановившегося движения, согласно теоремы Эйлера об изменении момента количества движения, производная во времени от главного момента движения системы относительно оси ротора равна главному моменту внешних сил относительно этой оси.
Здесь
при этом Вычтем почленно из уравнения (3-20) уравнение (3-19), тогда уравнение движения ротора турбогенератора примет вид
Момент движущих сил на лопатках турбоагрегата можно рассматривать как функцию
где Момент сил сопротивления на валу генератора - Мг зависит от скорости вращения вала, а так же суммарного электрического сопротивления, подключенного к генератору. Поскольку это сопротивление может меняться произвольно, то зависимость является случайной функцией времени. Поэтому общее изменение момента Мг можно представить в виде где
Допустим, что параметры пара
В результате уравнение ротора турбоагрегата с учетом малых отклонений независимых переменных от установившегося состояния примет вид
Перейдем в этом уравнении к относительным величинам независимых переменных, выбрав в качестве базовых
Обозначим Тогда уравнение (3-22) в относительных величинах независимых переменных будет:
Разделим переменные
здесь Обозначим: Уравнение (3-24) примет вид:
или где
Уравнение (3-26) в операторной форме:
Или в изображениях по Лапласу
Частные производные в составе постоянных коэффициентов уравнения (3-24) могут быть определены либо аналитически, либо из графиков статических характеристик в предположении постоянного значения всех независимых переменных, кроме той, по которой вычисляется производная. Так
Рис. 3.2. Статические характеристики турбогенератора а)
Подставив в формулу определения Т известные для данного типа турбин значение
Т-время достижения ротором двойной частоты вращения при полном сбросе нагрузки с постоянным ускорением, равным начальному значению. Примем характеристику регулировочных органов турбоагрегата (Рис. 3-2, б) линейной, тогда
Подставив найденные значения частных производных в формулы расчета
т.е. В уравнении (3-25) член уравнения Уравнение емкости - резервуар неизменной вместимости.
Рис. 3.3. Схема резервуара для газа. V-емкость резервуара, заполненного газом, G1- количество притекающего газа, G2- количество вытекающего газа, m1, m2- координаты, определяющие положение распределительных органов- задвижек резервуара на входе и выходе газа, Р- давление газа в резервуаре.
1. В установившемся режиме
2. При нарушении равенства расходов путем воздействия на распределительные органы согласно закону сохранения материи
где Предположим, что в неравновесных процессах состояние газа в резервуаре изменяется политропно: Продифференцировав уравнение политропы, получим
Для малых отклонений независимых переменных уравнение (3-30) станет где Предположим: тогда для малых колебаний имеем
Подставив выражения для
где или в операторной форме
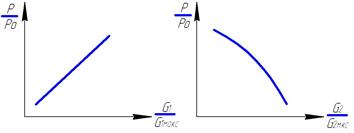
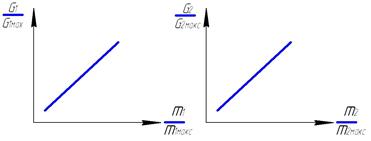
Частные производные для постоянных коэффициентов уравнения (3-33) и находят по статическим характеристикам ОР, как ОР давления газа (Рис.3.4) и характеристика для регулировочных задвижек. (Рис. 3.5)
Рис. 3.4. Статические характеристики резервуара газа.
Рис. 3.5. Статические характеристики регулировочных органов. Элементы, из которых составлена система регулирования могут существенно различаться по физической природе протекающих процессов, но сами процессы при этом будут описываться одинаковыми дифференциальными уравнениями. Сходство дифференциальных уравнений означает, что рассматриваемые объекты (элементы) математически подобны и что они обладают одинаковыми или близкими динамическими свойствами.
Структура АСР и ее основные элементы. По виду используемой энергии различают АСР: механические, гидравлические, пневматические, электрические, комбинированные. Регулятор, выполняя свои функции, должен перемещать регулировочные органы (РО) в требуемом направлении, для обеспечения устойчивого движения системы. При этом нередко для перестановки РО требуются затраты значительной мощности, которую не могут развить регуляторы. В таких случаях в составе АСР предусматривают усилительные устройства, которые включают в передаточный механизм между регулятором и РО. Усилители воспроизводят все указания от регулятора, и мощность сигнала от них должна быть достаточной для необходимого перемещения регулировочных органов. Автоматическое регулирование без участия усилителей называется прямым регулированием, а при наличии их в передаточном механизме - непрямым регулированием.
Рис. 1.4 Схема прямого (а) и непрямого регулирования (б) турбин. РС- регулятор скорости, ПЗ- промежуточный золотник, СМ-сервомотор, РО- регулировочные органы (клапаны) турбины.
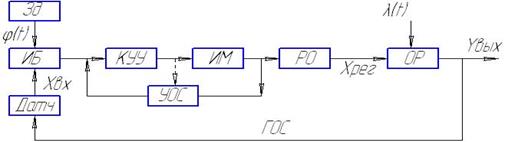
АСР с использованием электрической энергии нашли широкое применение для котельного оборудования и вспомогательных установок на ТЭС (Рис. 1.5)
Рис 1.5 Схема электрической системы регулирования. Д-датчик, в состав которого могут входить преобразователь энергии и чувствительный элемент: давления, температуры, расхода, других регулируемых величин; ЗД-задатчик, с помощью которого устанавливают заданное значение регулируемого параметра. УОС-устройство внутренней обратной связи, предназначенной для стабилизации процесса регулирования, его сигнал направлен навстречу хвх; ИБ-измерительный блок, производит алгебраическое суммирование сигналов, поступающих от датчика и задатчика; КУУ-командно - усилительное устройство; ИМ-исполнительный механизм. Примером использования в АСР комбинированного вида энергии является система регулирования турбины, в которой установлен электрогидравлический преобразователь для преобразования электрического сигнала от регуляторов энергосистемы (корректора частоты, противоаварийной автоматики, регулятора обменной мощности) в гидравлический сигнал для гидравлической системы регулирования турбоагрегата.
Переходные процессы в АСР. Нарушения равновесных режимов в АСР происходят под влиянием различных факторов, например, управляющего воздействия, направленного к регулятору от задатчика, или возмущающего воздействия приложенного к объекту регулирования. Системы регулирования ведут себя по отношению к этим воздействиям существенно различным образом. В то время как управляющее воздействие определяет величину и направление изменения регулируемого параметра, возмущающее воздействие не должно существенно влиять на изменение регулируемых параметров Виды переходных процессов в АСР при единичных ступенчатых воздействиях
Рис. 1.6 Переходные процессы в устойчивых АСР. а) – при управляющем воздействии, б) – при возмущающем воздействии.
Для устойчивых АСР переходные процессы сходящиеся, т.е.
Рис. 1.7 Переходные процессы в АСР: а) неустойчивых, б) находящихся на границе устойчивости.
АСР может находится на границе устойчивости, когда регулируемый параметр не принимает заданного значения и его отклонения имеет постоянную амплитуду отклонения от заданного значения (Рис. 1.7, б). При том или ином воздействии требуемые и действительные значения регулируемой величины могут отличаться друг от друга. Разность между заданным
Рис. 1.8 Ошибки и отклонения для АСР.
Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за начало отсчета. Различают динамическую ошибку и отклонение в переходных процессах и ошибку и отклонение в равновесных режимах - статическая ошибка, отклонение.
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 1652; Нарушение авторского права страницы



 и
и  (Рис. 1.6)
(Рис. 1.6)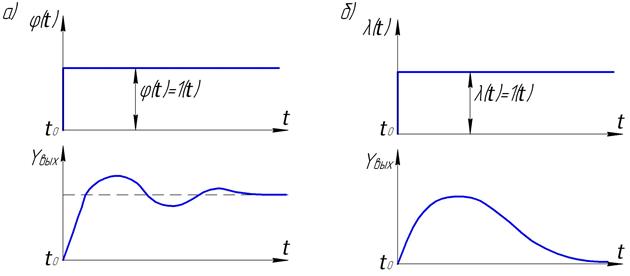
 стремится к заданному значению или возвращается к прежнему. В неустойчивых АСР переходные процессы расходящиеся: регулируемый параметр отклоняется от своего заданного значения на большую величину с возрастающей скоростью (Рис. 1.7, а)
стремится к заданному значению или возвращается к прежнему. В неустойчивых АСР переходные процессы расходящиеся: регулируемый параметр отклоняется от своего заданного значения на большую величину с возрастающей скоростью (Рис. 1.7, а)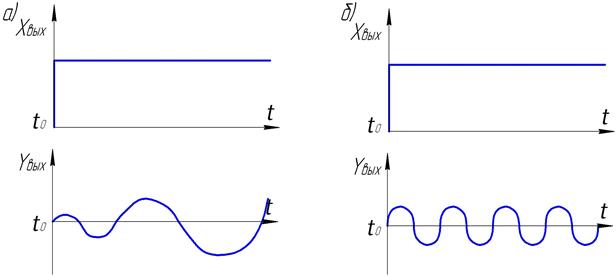
 и действительным значением регулируемой величины
и действительным значением регулируемой величины  называется ошибкой регулирования.
называется ошибкой регулирования.
 (3-20)
(3-20) -момент инерции ротора турбоагрегата, величина постоянная для турбогенератора, определяется весом ротора.
-момент инерции ротора турбоагрегата, величина постоянная для турбогенератора, определяется весом ротора. -угловая скорость вращения.
-угловая скорость вращения. ;
; 
 (3-21)
(3-21)
 - параметры пара перед турбиной,
- параметры пара перед турбиной,  - давление пара в конденсаторе турбины,
- давление пара в конденсаторе турбины,  - величина открытия регулировочных клапанов турбины,
- величина открытия регулировочных клапанов турбины,  ,
,  - изменение момента в зависимости от скорости вращения ротора турбоагрегата при постоянном сопротивлении сети,
- изменение момента в зависимости от скорости вращения ротора турбоагрегата при постоянном сопротивлении сети,  - изменение момента в зависимости от сопротивления сети при постоянной скорости вращения ротора.
- изменение момента в зависимости от сопротивления сети при постоянной скорости вращения ротора. не меняются, то есть изоэнтропийный перепад энтальпий (теплоперепад) в процессе расширения пара в проточной части турбины не изменен, тогда
не меняются, то есть изоэнтропийный перепад энтальпий (теплоперепад) в процессе расширения пара в проточной части турбины не изменен, тогда  .Разложим функции
.Разложим функции  и
и  в ряд по степеням независимых переменных (ряд Тэйлора), оставив в нем только члены ряда, содержащие отклонения не выше первой.
в ряд по степеням независимых переменных (ряд Тэйлора), оставив в нем только члены ряда, содержащие отклонения не выше первой. ,
,  .
. , (3-22)
, (3-22) -номинальное значение угловой скорости вращения ротора турбоагрегата,
-номинальное значение угловой скорости вращения ротора турбоагрегата,  -максимальное перемещение регулировочного клапана турбоагрегата, соответствующее изменению нагрузки турбоагрегата от холостого хода до максимальной.
-максимальное перемещение регулировочного клапана турбоагрегата, соответствующее изменению нагрузки турбоагрегата от холостого хода до максимальной. -максимальный момент сил сопротивления на валу генератора.
-максимальный момент сил сопротивления на валу генератора. ;
;  ;
; 
 , (3-23).
, (3-23). , (3-24)
, (3-24) ;
;  ;
;  ;
;  ;
;  ;
; 
 , (3-25)
, (3-25) , (3-26)
, (3-26) ;
;  ;
;  -динамическая постоянная ротора турбоагрегата, имеет размерность времени.
-динамическая постоянная ротора турбоагрегата, имеет размерность времени. -безразмерные коэффициенты, которые не содержат момента инерции ротора и характеризуют статические свойства системы.
-безразмерные коэффициенты, которые не содержат момента инерции ротора и характеризуют статические свойства системы. , (3-27)
, (3-27) . (3-28)
. (3-28) вычисляется в предположении m=idem
вычисляется в предположении m=idem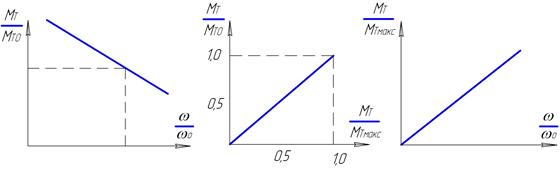
 , б)
, б)  , в)
, в) 
 ; т.к.
; т.к.  , то
, то  ;
;  ; т.к.
; т.к. 
 находят динамическую постоянную ротора турбины.
находят динамическую постоянную ротора турбины.
 .
. и
и  получают:
получают:  ,
,  ,
,  , а значит
, а значит  ,
,  .
. выражает свойства саморегулирования ротора турбоагрегата как объекта регулирования.
выражает свойства саморегулирования ротора турбоагрегата как объекта регулирования.
 . (3-29)
. (3-29) , (3-30)
, (3-30) ,
, 
 , n-показатель политропы.
, n-показатель политропы. и подставим в уравнение (3-30)
и подставим в уравнение (3-30) (3-31)
(3-31) -массовый вес газа.
-массовый вес газа. ,
,  ,
, 
 и
и  в уравнение (3-31) и представив переменные в относительных величинах, получим уравнение газового объема
в уравнение (3-31) и представив переменные в относительных величинах, получим уравнение газового объема , (3-32)
, (3-32) ;
;  ;
; 
 (3-33)
(3-33) -динамическая постоянная для емкости,
-динамическая постоянная для емкости,  и
и  - коэффициенты
- коэффициенты ;
;  .
. ;
;  ;
;  .
.