|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы составления дифференциальных уравнений АСР.
АСР, как и любой ее элемент, называется линейной или нелинейной в зависимости от того линейной или нелинейной является ее математическая модель-система дифференциальных и алгебраических уравнений, связывающих между собой входные и выходные параметры системы. Все реальные системы являются в той или иной степени нелинейными системами. Нелинейность систем в большинстве случаев связана с нелинейностью реальных статических характеристик элементов АСР. Решение системы дифференциальных уравнений, описывающих поведение такой системы, в общем виде получить нельзя. Возникает необходимость линеаризовать, если это возможно, систему нелинейных уравнений математической модели, заменив ее более простой, приближенной линейной системой. Если уравнения модели АСР нелинейны из-за нелинейности статической характеристики ее элементов, то линеаризация уравнения сводится к замене нелинейной статической характеристики элемента Математически эта замена производится путем разложения в ряд Тэйлора функции В других случаях линерализация производится путем проведения секущей, мало отклоняющейся от функции
Нелинейные статические характеристики, линеаризуемые в требуемом диапазоне изменения выходной величины рассмотренными выше способами, называют несущественно нелинейными характеристиками. Наряду с ними имеются так же характеристики, которые не поддаются линеаризации. Последние называются существенно нелинейными (Рис. 3.2).
Рис. 3.2. Статические характеристики релейных элементов а) идеального; б) с зоной нечувствтительности.
Аппроксимация такого рода разрывных характеристик прямой линией с постоянным углом наклона может привести к существенному искажению представлений о процессах, происходящих в реальной АСР. Пусть поведение объекта исследования описывается нелинейным дифференциальным уравнением в общем виде:
Установившееся состояние объекта характеризуется уравнением, для получения которого в уравнении (3-1)следует положить у=idem, x=idem.
где
где Уравнение (3-1) в отклонениях имеет вид Разложим левую часть уравнения (3-3) в ряд Тейлора относительно точки установившегося состояния
В левой части равенства (3-4) не записаны члены, содержащие отклонения получим уравнение
которое является линейным дифференциальным уравнением с постоянными коэффициентами Уравнение (3-5) представляет собой результат линеаризации уравнения (3-1). Очевидно, что необходимым условием линеаризации уравнения является возможность разложения в ряд Тэйлора функции Обычно при записи линеаризованного уравнения в левой его части оставляют лишь члены, содержащие отклонения выходной координаты, а все остальные члены переносят в правую часть. С учетом этого уравнение (3-5) можно переписать в виде:
где Принято записывать уравнение не в приращениях, а в относительных величинах, относя приращения к неким базисным значениям параметров. Обозначим
За базисные могут быть теоретически выбраны любые значения параметра, обычно максимальные либо номинальные значения параметров, отвечающие выбранному установившемуся режиму, тогда уравнение (3-6) предстанет в виде
обозначив получим где В итоге уравнение (3-8) будет иметь вид
Совокупность такого вида уравнений описывает поведение динамической системы, решив которые можно получить описание переходного процесса в этой системе. Постоянные коэффициенты уравнений могут быть определены либо аналитически, например, для тепловых объектов по данным теплового расчета объекта, его конструктивным характеристикам, либо из графиков статических характеристик. Последние строятся при постоянных значениях всех независимых переменных, кроме той, по которой вычисляется производная. Если статические характеристики линейны в широком диапазоне режимов работы или допустимо осреднение характеристик в широкой области, то полученные линейные уравнения применены для исследования так же при больших отклонениях
Операторы дифференцирования и передаточные функции. Преобразования Лапласа. Линейные дифференциальные уравнения с постоянными коэффициентами удобно записывать в символической операторной форме
где символ n-ая производная от Дифференциальные уравнения высокого порядка, имеющие производные в левой и правой части, в операторной форме примет вид
где
Многочлен
тогда решение уравнения (3-11) может быть найдено в виде алгебраического уравнения
Идею перехода к алгебраическому методу решения дифференциальных уравнений дал английский физик Хэвисайд, который и ввел символ Однако при решении ряда задач с не нулевыми начальными условиями использование оператора дифференцирования Строгое математическое обоснование такого перехода дал Пьер Симон Лаплас и этот метод получил название операционного исчисления или метод преобразований Лапласа, согласно которому решение дифференциальных уравнений переводится из плоскости оригиналов (плоскости действий переменной t) в плоскость изображений (переменной S). Выполняя действия над изображением оригинала получают изображение ответа. А затем по изображению ответа ищут его оригинал. Допустим имеем функцию а) непрерывность функции и ее производных, это значит в исследуемом интервале функция не имеет разрыва, б) функция абсолютно интегрируема, т.е. интеграл функции от 0 до ∞ есть конечное число
Возьмем интеграл от функции
тогда интеграл уже не будет функцией от Обозначим Этот интеграл назван изображением функции по Лапласу, а то действие, которое отражает этот интеграл, называется прямое преобразование Лапласа. Принято записывать прямое преобразование по Лапласу как Для большого количества функций изображения найдены. Например, изображение постоянной величины:
Изображение производной Американский математик Карсон предложил ввести преобразования вида Запишем исходное уравнение
в изображениях по Лапласу, умножив обе части уравнения на
Проинтегрируем уравнение (3-14) в области от 0 до ∞
Пусть имеем нулевые начальные условия, то есть
или Последнее означает, что решение дифференциального уравнения в действительной плоскости –плоскости действительной переменной Далее по найденному изображению ответа находят его оригинал. Для нахождения оригинала ответа надо воспользоваться обратным изображением Лапласа
для этого существует таблица функций обратных переходов. Преобразуем дифференциальное уравнение, описывающее движение системы (3-11), по Лапласу, предположив нулевые начальные условия при его решении, введем обозначения:
где получают
здесь При нулевых начальных условиях Используя обозначение Это уравнение связывает изображения Функция Таким образом, зная передаточную функцию системы Имея передаточную функцию
где:
Примеры составления уравнений объектов регулирования. Уравнения ротора турбины. На ротор турбоагрегата действует с одной стороны- вращающий момент, обусловленный движущими силами на лопатках турбины, расходом пара в проточную часть турбоагрегата, а с другой –момент сил сопротивления со стороны генератора, для привода которого служит турбина (Рис.4.1). Рис. 3.1. Паровая конденсационная турбина 1- регулировочные клапаны, 2- турбина, 3- генератор, 4- конденсатор.
При установившемся режиме работы турбогенератора ротор вращается равномерно с постоянной скоростью, что возможно только при равенстве моментов сил Мт- движущих сил и Мг-сил сопротивления. Мт0-Мг0=0, (3-19) Индекс нуль соответствует установившемуся движению. В процессе регулирования равенство моментов сил может нарушаться, например, из-за изменения давления пара перед турбоагрегатом, расхода пара в проточной части турбины, изменения электрического сопротивления приборов и агрегатов, подключенных к генератору. Для неустановившегося движения, согласно теоремы Эйлера об изменении момента количества движения, производная во времени от главного момента движения системы относительно оси ротора равна главному моменту внешних сил относительно этой оси.
Здесь
при этом Вычтем почленно из уравнения (3-20) уравнение (3-19), тогда уравнение движения ротора турбогенератора примет вид
Момент движущих сил на лопатках турбоагрегата можно рассматривать как функцию
где Момент сил сопротивления на валу генератора - Мг зависит от скорости вращения вала, а так же суммарного электрического сопротивления, подключенного к генератору. Поскольку это сопротивление может меняться произвольно, то зависимость является случайной функцией времени. Поэтому общее изменение момента Мг можно представить в виде где
Допустим, что параметры пара
В результате уравнение ротора турбоагрегата с учетом малых отклонений независимых переменных от установившегося состояния примет вид
Перейдем в этом уравнении к относительным величинам независимых переменных, выбрав в качестве базовых
Обозначим Тогда уравнение (3-22) в относительных величинах независимых переменных будет:
Разделим переменные
здесь Обозначим: Уравнение (3-24) примет вид:
или где
Уравнение (3-26) в операторной форме:
Или в изображениях по Лапласу
Частные производные в составе постоянных коэффициентов уравнения (3-24) могут быть определены либо аналитически, либо из графиков статических характеристик в предположении постоянного значения всех независимых переменных, кроме той, по которой вычисляется производная. Так
Рис. 3.2. Статические характеристики турбогенератора а)
Подставив в формулу определения Т известные для данного типа турбин значение
Т-время достижения ротором двойной частоты вращения при полном сбросе нагрузки с постоянным ускорением, равным начальному значению. Примем характеристику регулировочных органов турбоагрегата (Рис. 3-2, б) линейной, тогда
Подставив найденные значения частных производных в формулы расчета
т.е. В уравнении (3-25) член уравнения Уравнение емкости - резервуар неизменной вместимости.
Рис. 3.3. Схема резервуара для газа. V-емкость резервуара, заполненного газом, G1- количество притекающего газа, G2- количество вытекающего газа, m1, m2- координаты, определяющие положение распределительных органов- задвижек резервуара на входе и выходе газа, Р- давление газа в резервуаре.
1. В установившемся режиме
2. При нарушении равенства расходов путем воздействия на распределительные органы согласно закону сохранения материи
где Предположим, что в неравновесных процессах состояние газа в резервуаре изменяется политропно: Продифференцировав уравнение политропы, получим
Для малых отклонений независимых переменных уравнение (3-30) станет где Предположим: тогда для малых колебаний имеем
Подставив выражения для
где или в операторной форме
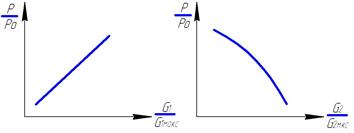
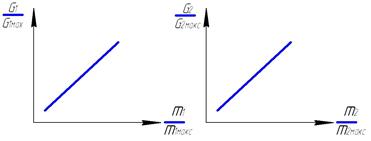
Частные производные для постоянных коэффициентов уравнения (3-33) и находят по статическим характеристикам ОР, как ОР давления газа (Рис.3.4) и характеристика для регулировочных задвижек. (Рис. 3.5)
Рис. 3.4. Статические характеристики резервуара газа.
Рис. 3.5. Статические характеристики регулировочных органов. Элементы, из которых составлена система регулирования могут существенно различаться по физической природе протекающих процессов, но сами процессы при этом будут описываться одинаковыми дифференциальными уравнениями. Сходство дифференциальных уравнений означает, что рассматриваемые объекты (элементы) математически подобны и что они обладают одинаковыми или близкими динамическими свойствами.
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 1475; Нарушение авторского права страницы
 , (Рис.3.1, а, б) некоторой линейной функцией
, (Рис.3.1, а, б) некоторой линейной функцией  , где
, где  - выходной параметр,
- выходной параметр,  -входной параметр.
-входной параметр. ,
,  , соответствующей установившемуся состоянию работы объекта математического исследования.
, соответствующей установившемуся состоянию работы объекта математического исследования. Рис. 3.1. Линеаризация статических характеристик.
Рис. 3.1. Линеаризация статических характеристик.
 , (3.1)
, (3.1) , (3.2)
, (3.2) ,
,  ,
,  и
и  -отклонения координат
-отклонения координат  (3-3)
(3-3) .
. (3-4)
(3-4) и значений координат
и значений координат  , (3-5)
, (3-5) ,
,  ,
,  ,
,  .
. , (3-6)
, (3-6)

 (3-7)
(3-7) ;
;  ;
;  ;
;  ,
,  , (3-8)
, (3-8) ;
;  ;
;  (3-9)
(3-9) , (3-10)
, (3-10) назван оператором дифференцирования,
назван оператором дифференцирования,  будет
будет  .
. , (3-11)
, (3-11) ,
,  .
. называют собственным оператором объекта (элемента), а многочлен
называют собственным оператором объекта (элемента), а многочлен  -входным оператором. Собственный оператор
-входным оператором. Собственный оператор  объекта (элемента АСР), описываемого линейным дифференциальным уравнением с постоянными коэффициентами.
объекта (элемента АСР), описываемого линейным дифференциальным уравнением с постоянными коэффициентами. ,
, 
 (3-12)
(3-12) , предположим, что эта функция удовлетворяет условиям Дерихле, существо которых:
, предположим, что эта функция удовлетворяет условиям Дерихле, существо которых: 

 , где
, где  комплексная переменная,
комплексная переменная,  , но станет функцией от S.
, но станет функцией от S.
 , которое называют так же L-преобразованием.
, которое называют так же L-преобразованием. .
. будет
будет  , если в действительной плоскости
, если в действительной плоскости  , то в плоскости изображений 1 становится величиной
, то в плоскости изображений 1 становится величиной  .
. :
:  ;
;  .
. , то есть практически изменил масштаб величины. Законы, установленные Лапласом, остаются, но при этом
, то есть практически изменил масштаб величины. Законы, установленные Лапласом, остаются, но при этом  остается 1, а число
остается 1, а число  числом
числом  (3-13)
(3-13) , получим
, получим (3-14)
(3-14) (3-15)
(3-15) ;
;  , тогда в изображениях по Лапласу уравнение (3-15) примет вид
, тогда в изображениях по Лапласу уравнение (3-15) примет вид (3-16)
(3-16) (3-17)
(3-17) , и решают это уравнение как алгебраическое.
, и решают это уравнение как алгебраическое. ,
,  и
и  ,
,  и
и  - изображения функции оригинала
- изображения функции оригинала  , (3-18)
, (3-18) ,
, 
 .
. , решение уравнения (3-18) примет вид
, решение уравнения (3-18) примет вид 
 выходной координаты системы с изображением
выходной координаты системы с изображением  -входного воздействия.
-входного воздействия. - характеризует динамические свойства системы и называется передаточной функцией
- характеризует динамические свойства системы и называется передаточной функцией  . Она представляет собой отношение изображения по Лапласу выходной координаты системы к изображению по Лапласу входного воздействия при нулевых начальных условиях. Подобное определение функции не находится в противоречии с ранее данным определением передаточной функции
. Она представляет собой отношение изображения по Лапласу выходной координаты системы к изображению по Лапласу входного воздействия при нулевых начальных условиях. Подобное определение функции не находится в противоречии с ранее данным определением передаточной функции  , т.к. для решения системы дифференциальных уравнений при нулевых начальных условиях комплексная переменная
, т.к. для решения системы дифференциальных уравнений при нулевых начальных условиях комплексная переменная  .
. воздействия
воздействия  на
на 
 ,
,  -частота нанесения входного воздействия и при установившемся колебательном движении системы – частота изменения ее выходной координаты.
-частота нанесения входного воздействия и при установившемся колебательном движении системы – частота изменения ее выходной координаты.
 (3-20)
(3-20) -момент инерции ротора турбоагрегата, величина постоянная для турбогенератора, определяется весом ротора.
-момент инерции ротора турбоагрегата, величина постоянная для турбогенератора, определяется весом ротора. ;
; 
 (3-21)
(3-21)
 - параметры пара перед турбиной,
- параметры пара перед турбиной,  - давление пара в конденсаторе турбины,
- давление пара в конденсаторе турбины,  - величина открытия регулировочных клапанов турбины,
- величина открытия регулировочных клапанов турбины,  ,
,  - изменение момента в зависимости от скорости вращения ротора турбоагрегата при постоянном сопротивлении сети,
- изменение момента в зависимости от скорости вращения ротора турбоагрегата при постоянном сопротивлении сети,  - изменение момента в зависимости от сопротивления сети при постоянной скорости вращения ротора.
- изменение момента в зависимости от сопротивления сети при постоянной скорости вращения ротора. не меняются, то есть изоэнтропийный перепад энтальпий (теплоперепад) в процессе расширения пара в проточной части турбины не изменен, тогда
не меняются, то есть изоэнтропийный перепад энтальпий (теплоперепад) в процессе расширения пара в проточной части турбины не изменен, тогда  .Разложим функции
.Разложим функции  и
и  в ряд по степеням независимых переменных (ряд Тэйлора), оставив в нем только члены ряда, содержащие отклонения не выше первой.
в ряд по степеням независимых переменных (ряд Тэйлора), оставив в нем только члены ряда, содержащие отклонения не выше первой. ,
,  .
. , (3-22)
, (3-22) -номинальное значение угловой скорости вращения ротора турбоагрегата,
-номинальное значение угловой скорости вращения ротора турбоагрегата,  -максимальное перемещение регулировочного клапана турбоагрегата, соответствующее изменению нагрузки турбоагрегата от холостого хода до максимальной.
-максимальное перемещение регулировочного клапана турбоагрегата, соответствующее изменению нагрузки турбоагрегата от холостого хода до максимальной. -максимальный момент сил сопротивления на валу генератора.
-максимальный момент сил сопротивления на валу генератора. ;
;  ;
; 
 , (3-23).
, (3-23). , (3-24)
, (3-24) ;
;  ;
;  ;
;  ;
;  ;
; 
 , (3-25)
, (3-25) , (3-26)
, (3-26) ;
;  ;
;  -динамическая постоянная ротора турбоагрегата, имеет размерность времени.
-динамическая постоянная ротора турбоагрегата, имеет размерность времени. -безразмерные коэффициенты, которые не содержат момента инерции ротора и характеризуют статические свойства системы.
-безразмерные коэффициенты, которые не содержат момента инерции ротора и характеризуют статические свойства системы. , (3-27)
, (3-27) . (3-28)
. (3-28) вычисляется в предположении m=idem
вычисляется в предположении m=idem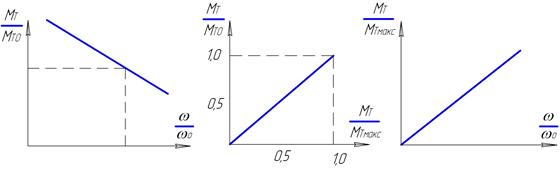
 , б)
, б)  , в)
, в) 
 ; т.к.
; т.к.  , то
, то  ;
;  ; т.к.
; т.к. 
 находят динамическую постоянную ротора турбины.
находят динамическую постоянную ротора турбины.
 .
. и
и  получают:
получают:  ,
,  ,
,  , а значит
, а значит  ,
,  .
. выражает свойства саморегулирования ротора турбоагрегата как объекта регулирования.
выражает свойства саморегулирования ротора турбоагрегата как объекта регулирования.
 . (3-29)
. (3-29) , (3-30)
, (3-30) ,
, 
 , n-показатель политропы.
, n-показатель политропы. и подставим в уравнение (3-30)
и подставим в уравнение (3-30) (3-31)
(3-31) -массовый вес газа.
-массовый вес газа. ,
,  ,
, 
 и
и  в уравнение (3-31) и представив переменные в относительных величинах, получим уравнение газового объема
в уравнение (3-31) и представив переменные в относительных величинах, получим уравнение газового объема , (3-32)
, (3-32) ;
;  ;
; 
 (3-33)
(3-33) -динамическая постоянная для емкости,
-динамическая постоянная для емкости,  и
и  - коэффициенты
- коэффициенты ;
;  .
. ;
;  ;
;  .
.