
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Законы регулирования в автоматических системах ⇐ ПредыдущаяСтр 9 из 9
Законом регулирования называется математическая зависимость между положением регулировочного органа системы и сигналом, поступающим на вход регулятора. 7.1 Функциональная схема регулятора. Функциональная схема регулятора (Рис.7.1) состоит из следующих элементов
Рис. 7.1 Функциональная схема регулятора. Д – датчик; ЗД – задатчик; ИБ - измерительный блок; КУУ - командно-усилительное устройство; ИМ – исполнительный механизм; УОС – устройство обратной связи; РО – регулировочный орган. Датчик (Д) - первичный прибор, который служит для измерения регулируемой величины Преобразование сигнала регулируемой величины Требования к датчикам промышленных регуляторов: 1) направленность действия - изменение выходного сигнала датчика не должно оказывать действие на значение входного сигнала; 2) высокая чувствительность и малая инерционность; 3) Линейность статической характеристики; 4) высокая надежность – отказ в работе может привести к отказу и ложным срабатываниям АСР. Датчики устанавливаются непосредственно на объектах регулирования, часто находясь в контакте с измеряемой средой, поэтому они должны обладать высокой устойчивостью к термическим и механическим воздействиям, вибрации и коррозии. Задатчик ручного управления (ЗД) – предназначен для формирования сигнала, соответствующего заданному значению регулируемой величины. Его выходной сигнал так же формируется унифицированным, как и выходной сигнал датчика. Например, если датчик имеет на выходе напряжение постоянного тока, то и с выхода задатчика должно поступать напряжение постоянного тока. Конструктивно задатчик может быть встроен в ИБ регулятора или установлен отдельно на щите управления. Требования к задатчикам: высокая стабильность выходного сигнала, достаточный диапазон изменения сигнала, позволяющий компенсировать постоянную составляющую регулируемой величины. Композиционно структура регулятора определяется наличием следующих элементов: - измерительный блок (ИБ), на который поступают сигналы от датчика регулируемого параметра и задатчика. В ИБ происходит сравнение этих двух сигналов, их алгебраическое суммирование; - командно-усилительное устройство (КУУ), предназначенное для усиления выходного сигнала ИБ до значений, необходимых для управления исполнительным механизмом; - устройство обратной связи (УОС) - внутренняя отрицательная обратная связь для стабилизации процесса регулирования. Сигнал на УОС поступает либо от КУУ, либо от исполнительного механизма; - исполнительные устройства регуляторов (ИМ), предназначенные для перемещения регулировочных органов, с которыми они сочленены посредством механической передачи. Формирование законов регулирования осуществляется на основе статических и динамических свойств трех элементов регулятора: КУУ, УОС и ИМ, при этом стремятся реализовать законы регулирования так, чтобы их описание стало возможно линейными дифференциальными уравнениями.
7.2 Законы регулирования. К числу реализуемых законов регулирования в теплоэнергетике относят: - пропорциональный закон регулирования, П – закон; - интегральный закон, И – закон; - пропорционально - -интегральный закон, ПИ – закон; - пропорционально – дифференциальный закон, ПД – закон; - пропорционально – интегрально - дифференциальный закон, ПИД - закон; Действие регулятора всегда направленно в сторону противоположную отклонению регулируемого параметра, поэтому в уравнениях, описывающих законы регулирования, регулирующее воздействие в сторону объекта регулирования всегда со знаком действия, противоположным отклонению регулируемой величины.
Пропорциональный закон регулирования, П - закон. Уравнение закона регулирования В этом случае каждому значению входного параметра Передаточная функция регулятора Статическая характеристика пропорционального регулирования (Рис. 7.2)
Рис. 7.2 Статическая характеристика.
Для замкнутой АСР, состоящей из ОР и П - регулятора, характерно наличие остаточного отклонения регулируемой величины или ошибки, по окончанию процесса регулирования.
Динамическая характеристика П - регулятора. (Рис. 7.3)
Рис. 7.3 Динамическая характеристика П-регулятора.
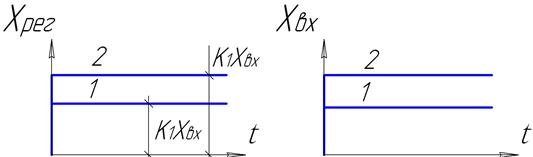
Динамическая характеристика АСР с П-регулятором (Рис. 7.4).
Рис. 7.4 Переходные процессы в АСР с П-регулятором при управляющем (1) и возмущающем (2) воздействии.
Настроечным параметром П – регулятора является Достоинство П - регуляторов – динамичность; регулятор вступает в действие сразу после получения сигнала на его вход.Недостатком регулятора является наличие ошибки регулирования в статике. От ошибки не избавится, так как статическая характеристика П- регулятора имеет наклон, величина которого зависит от коэффициента неравномерности
Интегральный закон регулирования, И – закон. Уравнение закона регулирования Проинтегрировав уравнение (7.3) получим
где Передаточная функция интегрального (И) регулятора
Другая формула записи И- закона регулирования
Передаточная функция интегрального (И) регулятора
Скоростная характеристика И – регулятора
Рис. 7.5 Скоростная характеристика И-регулятора Чем больше Статическая характеристика регулятора (рис.7.6)
Рис. 7.6 Статическая характеристика И-регулятора
Достоинство И- регулятора - отсутствие статической погрешности регулирования. Динамическая характеристика И-регулятора (Рис.7.7).
Рис. 7.7 Динамическая характеристика И-регулятора
Чем больше по величине сигнал на входе регулятора, тем выше скорость перемещения регулировочного органа при одном и том же воздействии. Чем больше
Пропорционально - интегральный закон регулирования. ПИ – закон. Преимущества П - регулятора (его динамичность) и И - регулятора (отсутствие в статике погрешности регулирования) объединены в ПИ – законе и соответственно в ПИ-регуляторе, когда регулировочные органы перемещаются со скоростью, пропорциональной величине и скорости изменения входного сигнала поступающего на ПИ – регулятор. Уравнение
Проинтегрировав уравнение (7.7), получим (7.8)
Передаточная функция для ПИ-регулятора.
Динамическая характеристика ПИ-регулятора.
Рис. 7.5 Динамическая характеристика ПИ-регулятора
В замкнутой одноконтурной АСР, состоящей из ОР и ПИ-регулятора отсутствует остаточная погрешность регулируемого параметра. В то же время при установившемся значении регулируемого параметра регулирующий орган может занимать различные положения. Параметры настройки ПИ – регулятора:
Пропорционально-дифференциальный закон регулирования, ПД – закон. П, И, ПИ-регуляторы реагируют только на возникшие нарушения технологического процесса. Если же регулируемая величина В этом случае целесообразно, чтобы регулятор вырабатывал регулирующее воздействие пропорционально скорости отклонения С этой целью в состав АСР вводят дифференциатор- устройство, позволяющее формировать в законе регулирования сигнал, пропорциональный скорости изменения регулируемой величины (Рис. 7.9).
Рис. 7.9 структурная схема ПД-регулятора Д-р – дифференциатор, Р-р – П-регулятор
Закон регулирования: а) для идеального дифференциатора
Передаточная функция ПД - регулятора
б) для реального дифференциатора
Передаточная функция реального дифференциатора
Здесь
При отклонении регулируемого параметра на выходе регулятора мгновенно появляется сигнал от действия дифференцирующего устройства и затем сигнал от пропорциональной его составляющей. В установившемся движении АСР сигнал от дифференциатора спадает до нуля и остается сигнал П - составляющей, равный Динамическая характеристика ПД-регулятора (Рис.7.10) 7.10 Динамическая характеристика ПД- регулятора
Параметры настройки ПД –регулятора Время
Рис. 7.11 Изменение выходного сигнала дифференциатора.
Применение дифференциатора сокращает время переходного процесса
Пропорционально-интегрально-дифференциальный, ПИД закон регулирования. Закон регулирования
Передаточная функция ПИД - регулятора
Динамическая характеристика (Рис.7.12)
7.10 Динамическая характеристика ПИД- регулятора
Достоинства ПИД – регулятора: реагирует на отклонение Недостаток: сложность настройки регулятора В теплоэнергетике применяют П, ПИ, ПИД законы.
ГЛАВА 8. Исполнительные механизмы в АСР
Назначения исполнительного механизма (ИМ) или сервопривода - перемещение регулировочных органов объектов регулирования. По виду используемой энергии делятся на электрические, гидравлические, пневматические. Основные показатели ИМ: усилие, развиваемой на выходе, максимальный ход поршня (угол поворота вала). Управление ИМ осуществляется через командно-усилительное устройство регулятора либо в ручную или дистанционно. В зависимости от режимов работы исполнительные механизмы подразделяются на ИМ с постоянной скоростью, ИМ с переменной скоростью, ИМ с пропорциональной скоростью перемещения выхода устройства (вала, поршня)
8.1 Исполнительные механизмы с постоянной скоростью.
К ним относят ИМ, у которых скорость не зависит от величины управляющего сигнала. Уравнение движения Передаточная функция где Тс – время действия ИМ. Скоростная характеристика ИМ (Рис. 8.1)
Рис. 8.1 Скоростная характеристика.
Динамическая характерисика (Рис. 8.2)
Рис. 8.2 Динамическая характеристика ИМ. 1, 2 - величины выходного воздействия Здесь скорость перемещения выходного устройства ИМ не зависит от величины воздействия. Для реальных ИМ с постоянной скоростью скоростная характеристика имеет зону нечувствительности пускового устройства
Рис. 8.3 Скоростная характеристика реального ИМ.
В качестве пускового устройства используется, как правило, электромагнитные устройства, как-то магнитные пускатели или электромагнитные реле. Электрический ИМ может находится в 3-х состояниях: 1) вращение ротора с постоянной скоростью в направлении (+); 2) неподвижность; 3) вращение ротора в направлении (-) – в противоположном (+) направлении. Применение пусковых устройств усложняет характеристику ИМ, т.к. гистерезисные явления в магнитных цепях приводят к появлению зон возврата Функциональная схема промышленных регуляторов с нелинейным элементом в прямом канале усиления представлена на Рис. 8.4.
Рис. 8.4 Функциональная схема регулятора с релейными элементами. УОС-RС-цепочка, инерционное звено
Статическая характеристика 3-х позиционного реле (Рис. 8.5). Здесь
Рис. 8.5 Статическая характеристика трехпозиционного реле.
Таким образом, характеристики ИМ с постоянной скоростью перемещения выходного устройства, включающего пусковое устройство, является существенно нелинейной и всякая линейная аппроксимация статической характеристики приводит к качественным отличиям в работе реальной АСР от идеальной. Регуляторы такого состава относятся к релейно-импульсным автоматическим регуляторам, и режим его работы называется релейно-импульсным. Однако статическая характеристика регулятора может быть близка к линейной. При подачи на вход ИБ релейно-импульсного регулятора ступенчатого сигнала ИМ с постоянной скоростью находят широкое применение в АСР, в т.ч. для энерго-оборудования котлотурбинных и реакторных цехов на базе электрической ветви средств автоматизации. Их достоинства: простота в эксплуатации, удобства монтажа и наладки, отсутствие ограничений пространственного расположения, высокая скорость передачи информации. Однако надежность работы электродвигателей заметно снижается при их использовании в условиях горячих цехов с высокой влажностью, на участках с повышенной вибрацией. На базе электрических двигателей трудно построить компактный ИМ большой мощности. Электродвигатели общепромышленного назначения, как и любые электрические устройства, нельзя применять на взрыво и пожароопастных участках промышленных производств.
8.2 Исполнительные механизмы с переменной скоростью.
Уравнения движения где Передаточная функция
К числу исполнительных механизмов с переменной скоростью относятся гидравлические ИМ Скоростная характеристика (Рис. 8.6)
Рис. 8.6 Скоростная характеристика ИМ с переменной скоростью.
Динамическая характеристика (Рис. 8.7) Рис. 8.7 Динамическая характеристика.
Скорость перемещения выходного устройства зависит от величины сигнала на вход ИМ. Достоинства ИМ с переменой скоростью в том, что они позволяют надежно и просто реализовать преобразование управляющих сигналов в перемещение регулировочных органов, осуществляемой с большой скоростью и мощностью. Они надежно работают в неблагоприятных условиях при высокой влажности, повышенной температуре, вибрации и пр. Недостатками этих ИМ является то, что гидравлические системы требуют тщательной герметизации линий связи, кроме того, необходимо иметь специальные емкости для хранения рабочей жидкости. Гидравлические АСР повсеместно применяются в АСР паровых и газовых турбин.
8.3 Исполнительные механизмы с пропорциональной скоростью.
Уравнение движения Проинтегрировав (8.5) получим Передаточная функция
Скорость движения выходного устройства пропорциональна скорости входного сигнала ИМ. Статическая характеристика ИМ с пропорциональной скоростью (Рис. 8.8)
Рис. 8.8 Статические характеристики ИМ с пропорциональной скоростью. а) идеального, б) реального, где Динамическая характеристика (Рис. 8.9)
Рис. 8.9 Динамическая характеристика ИМ с пропорциональной скоростью.
К числу ИМ с пропорциональной скоростью перемещения выходного устройства относятся: пневматические сервоприводы, мембранные ИМ с уравновешивающей пружиной. Верхняя ветвь пневматических АСР строится на электрических элементах. Достоинствами ИМ с пропорциональной скоростью является надежность в работе, высокая пожаро и взрывобезопасность. Недостатками: необходимость применения специальных компрессорных установок питания с устройствами для очистки воздуха, относительно малая скорость передачи и преобразования информации. Этот тип исполнительных механизмов применяется в цехах с повышенной влажностью, в химических цехах ТЭС. Общим недостатком сервоприводов всех перечисленных выше исполнительных механизмов является разгон и выбег выходного вала или поршня, связанные с инерционностью вращающихся или движущихся масс. Разгон выходного устройства характеризуется временем разгона
Рис. 8.10 Характеристика «выбега» сервопривода.
На долю выбега приходится наиболее существенное дополнительное перемещение регулирующего органа Требования к сервоприводам промышленных регуляторов. Сервоприводы примышленных регуляторов должны иметь: - некоторый запас мощности по отношению к максимальному перестановочному усилию ~25%, чрезмерный запас мощности экономически не выгоден, - минимальный выбег - реверсирование хода, т.е. возможность изменения направления движения сервопривода в зависимости от знака управляющего сигнала.
ГЛАВА 9. Реализация законов регулирования
Основными элементами регулятора, формирующими законы регулирования, является командно-усилительное устройство (КУУ), устройство обратной связи (УОС) и исполнительный механизм (ИМ). При этом обратная связь может охватывать только КУУ либо КУУ и ИМ. В реальных АСР применяют ИМ, которые обладают характеристиками интегрального или пропорционального звена. Если ИМ является звеном пропорционально действия, то с его использованием может быть реализован любой линейный закон регулирования. На базе ИМ с характеристиками интегрального звена также может быть реализованы различные зоны регулирования, но только при помощи выбора соответствующих характеристик УОС. Возможные варианты реализации законов регулирования определяются в зависимости от структурирования регулятора (Рис. 9.1).
Рис. 9.1 Структурные схемы для реализации законов регулирования.
9.1 Регулятор пропорционального действия, П-регулятор.
Уравнение закона регулирования Передаточная функция П-регулятора Устройство внутренней обратной связи охватывает ИМ (Рис. 9.1, а) Передаточная функция для данной структуры регулятора
Принимаем, что КУУ-пропорциональное звено с коэффициентом усиления Ку> > 1, Так как передаточная функция КУУ
или Следовательно
Таким образом, для формирования П - закона регулирования устройство обратной связи П - регулятора должно иметь характеристики пропорционального звена вне зависимости от характеристик ИМ. Такая внутренняя обратная связь называется безинерционной или жесткой обратной связью. В случае, если обратная связь не охватывает ИМ (Рис. 9.1, б) передаточная функция П-регулятора будет:
При том же условии что Передаточная функция П-регулятора имеет вид.
Если исполнительный механизм с пропорциональной скоростью перемещения выходного устройства, т.е. его передаточная функция
Тогда Отсюда Следовательно, при ИМ с пропорциональной скоростью внутренняя обратная связь должна быть безинерционной (жесткой) обратной связью. Если исполнительный механизм емеет характеристики интегрального звена, то его передаточная функция
При этом передаточная функция регулятора:
Так как передаточная функция П-регулятора
а значит передаточная функция УОС
Следовательно УОС должно иметь характеристики интегрального звена. Такая внутренняя обратная связь называется гибкой обратной связью.
9.2 Пропорционально-интегральный регулятор, ПИ-регулятор.
Уравнение закона регулирования Передаточная функция Пи-регулятора Если внутренняя обратная связь охватывает исполнительный механизм (Рис. 9.1, а), то передаточная функция ПИ-регулятора
при тех же условиях
а значит передаточная функция УОС будет:
Таким образом, устройство обратной связи должно иметь характеристики реального дифференцирующего звена. Такая внутренняя обратная связь называется гибкой обратной связью и реализуется вне зависимости от типа ИМ: Если внутренняя обратная связь не охватывает ИМ (Рис. 9.1, б), то передаточная функция ПИ-регулятора будет
при принятых ранее условиях: Получим Допустим исполнительный механизм с пропорциональной скоростью, его передаточная функция
а передаточная функция УОС
Следовательно, УОС должно быть реальным дифференциальным звеном. Такой ПИ-регулятор называется регулятором с упругой обратной связью или изодромным. Если исполнительный механизм будет с характеристиками интегрального звена, т.е. ИМ с переменной скоростью, то его передаточная функция
а передаточная функция ПИ-регулятора:
следовательно, передаточная функция УОС
что соответствует
т.е. передаточной функции апериодического звена. Таким образом, внутренняя обратная связь является инерционной жесткой обратной связью.
9.3 Выбор типа регулятора.
Во многих случаях возможность выбора регулятора по виду реализуемого в нем закона регулирования ограничена, поскольку большинство систем регулирования предназначено для автоматической стабилизации параметров при весьма ограниченном диапазоне их допустимых отклонений. Выбор закона регулирования осуществляется в зависимости от сложности ОР и требований к точности поддержания регулируемой величины. В тех случаях, когда допускаются относительно большие колебания регулируемого параметра, целесообразно устанавливать простейшие релейно-пропорциональные регуляторы, работающие по принципу «открыто – закрыто» и реализующие
При наладке этих регуляторов важно соблюдать одно требование Статическая характеристика
Рис. 9.2 Статическая характеристика Рп-регулятора.
Динамическая характеристика
Рис. 9.3 Динамическая характеристика Рп-регулятора.
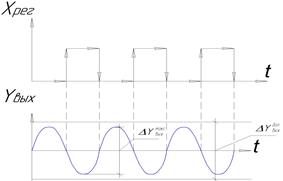
При более жестких требованиях к автоматической системе регулирования, например, при недопустимости автоколебательных режимов, возникающих в системах с позиционными
где
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 1907; Нарушение авторского права страницы


 и преобразования ее в сигнал
и преобразования ее в сигнал  , поступающий на измерительный блок (ИБ). В качестве измерительных устройств теплотехнических первичных приборов используется термопары, термометры сопротивления, манометрические пружины и мембраны, дифманометры и др.
, поступающий на измерительный блок (ИБ). В качестве измерительных устройств теплотехнических первичных приборов используется термопары, термометры сопротивления, манометрические пружины и мембраны, дифманометры и др. в
в  ,
,  ,
,  ,
,  ,
,  для электрических сигналов,
для электрических сигналов,  для пневматических и
для пневматических и  для гидравлических сигналов.
для гидравлических сигналов. (7-1)
(7-1) соответствует определенное положение регулировочного органа
соответствует определенное положение регулировочного органа  . Регулятор, реализующий П-закон регулирования, называется П-регулятором.
. Регулятор, реализующий П-закон регулирования, называется П-регулятором. . (7-2)
. (7-2)
 - коэффициент передачи (усиления) регулятора
- коэффициент передачи (усиления) регулятора -коэффициент неравномерности или статизм регулирования для П – регулятора, определяет величину погрешности регулирования в установившихся процессах.
-коэффициент неравномерности или статизм регулирования для П – регулятора, определяет величину погрешности регулирования в установившихся процессах.

 - его коэффициент неравномерности. При настройке устанавливают допустимые отклонение регулируемого параметра от заданного значения в статике – погрешность регулирования.
- его коэффициент неравномерности. При настройке устанавливают допустимые отклонение регулируемого параметра от заданного значения в статике – погрешность регулирования. .
. (7-3)
(7-3) ,
,  - коэффициент передачи, характеризующий скорость нарастания сигнала на выходе после нанесения воздействия
- коэффициент передачи, характеризующий скорость нарастания сигнала на выходе после нанесения воздействия  (7-4)
(7-4) (7-5)
(7-5) , (7-6)
, (7-6) - условный коэффициент передачи И- регулятора,
- условный коэффициент передачи И- регулятора,  - условная постоянная времени интегрирования.
- условная постоянная времени интегрирования.
 при одинаковой величине воздействия.
при одинаковой величине воздействия.

 (7-7)
(7-7) (7-8)
(7-8) (7-9)
(7-9)
 .
.  .
. .
.
 (7-10)
(7-10) (7-11)
(7-11) (7-12)
(7-12) (7-13)
(7-13)
 - коэффицент усиления дифференциатора,
- коэффицент усиления дифференциатора,  - постоянная времени дифференциатора – время действия дифференциатора.
- постоянная времени дифференциатора – время действия дифференциатора.
 до
до  (Рис. 7.11)
(Рис. 7.11)
 ,
,  - время полуспада сигнала.
- время полуспада сигнала. и уменьшает первую амплитуду изменения регулируемой величины, что улучшает динамику регулирования.
и уменьшает первую амплитуду изменения регулируемой величины, что улучшает динамику регулирования. . (7-14)
. (7-14) . (7-15)
. (7-15)
 , улучшает переходный процесс, сокращая время переходного процесса, уменьшает амплитудные колебания
, улучшает переходный процесс, сокращая время переходного процесса, уменьшает амплитудные колебания  (8-1)
(8-1) , (8-2)
, (8-2)
 - скорость перемещения выходного устройств ИМ.
- скорость перемещения выходного устройств ИМ.
 - скорость перемещения выходного устройства ИМ.
- скорость перемещения выходного устройства ИМ. (Рис. 8.3).
(Рис. 8.3).
 , при этом ИМ отключаются при несколько меньших значениях входного сигнала
, при этом ИМ отключаются при несколько меньших значениях входного сигнала  , чем при включении.
, чем при включении.
 порядка, РЭ- реальный элемент (3-х позиционное реле).
порядка, РЭ- реальный элемент (3-х позиционное реле). - выходной сигнал КУУ, входящий на релейный элемент,
- выходной сигнал КУУ, входящий на релейный элемент,  - выходной сигнал РЭ- на ИМ и УОС.
- выходной сигнал РЭ- на ИМ и УОС.
 -полузона),
-полузона),  - зона возврата.
- зона возврата. (например, перемещением ручки задатчика) сигнала на выходе КУУ будет иметь значение
(например, перемещением ручки задатчика) сигнала на выходе КУУ будет иметь значение  . При превышении этим сигналом зоны нечувствительности прямого хода трехпозиционного реле
. При превышении этим сигналом зоны нечувствительности прямого хода трехпозиционного реле  , в момент времени
, в момент времени  произойдет включение реле и ступенчатый сигнал
произойдет включение реле и ступенчатый сигнал  . Одновременно сигнал
. Одновременно сигнал  , (8-3)
, (8-3) - время полного хода выходного устройства-сервопривода.
- время полного хода выходного устройства-сервопривода. (8-4)
(8-4) - размерный коэффициент передачи.
- размерный коэффициент передачи.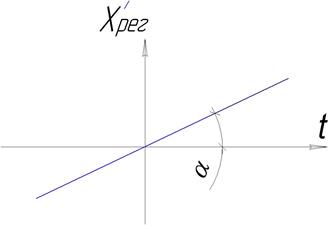

 (8-5)
(8-5) ,
,  (8-6)
(8-6)
 , выбег- временем выбега-
, выбег- временем выбега-  или полувыбега
или полувыбега  , обычно
, обычно 

 - передаточная функция КУУ,
- передаточная функция КУУ,  - передаточная функция ИМ,
- передаточная функция ИМ,  - передаточная функция УОС.
- передаточная функция УОС. (9-1)
(9-1) (9-2)
(9-2) (9-3)
(9-3) , при том, что
, при том, что  , получим передаточную функцию регулятора
, получим передаточную функцию регулятора (9-4)
(9-4) (9-5)
(9-5) (9-6)
(9-6) в равновесном режиме АСР.
в равновесном режиме АСР. (9-7)
(9-7) (9-8)
(9-8) , (9-10)
, (9-10) (9-11)
(9-11) (9-12)
(9-12) . (9-13)
. (9-13) (9-14)
(9-14) (9-15)
(9-15) , (9-16)
, (9-16) (9-17)
(9-17) (9-18)
(9-18) (9-19)
(9-19) (9-20)
(9-20) , (9-21)
, (9-21) , (9-22)
, (9-22) (9-23)
(9-23) (9-26)
(9-26) , (9-27)
, (9-27) (9-28)
(9-28) , (9-29)
, (9-29) , (9-30)
, (9-30) , (9-31)
, (9-31) , (9-32)
, (9-32) -закон регулирования.
-закон регулирования. . То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
. То есть максимальное отклонение или ошибка регулируемого параметра в статике не должно быть больше допустимой. Для обеспечения этого условия пропускная способность регулирующего органа при его открытии должна превышать максимально возможное возмущение по нагрузке. Такой способ регулирования называется двухпозиционным – по числу позиций, которые может занимать регулировочный орган. При этом динамические процессы регулирования имеют колебательный характер.
 -регуляторов. Основанием для установки
-регуляторов. Основанием для установки  ,
,  -численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом;
-численное значение оптимальной степени обратной связи регулятора, численное значение которого определяется расчетом;  - установившееся значение регулируемой величины, определяется по кривой переходного процесса;
- установившееся значение регулируемой величины, определяется по кривой переходного процесса;  - максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования;
- максимально допустимые по условиям технологического процесса или безопасной работы объекта остаточное отклонение регулируемой величины или ошибка регулирования;