
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение времени и пути разгона
Для определения времени и пути разгона необходимо иметь значения ускорений автомобиля на каждой передачи. Наиболее просто максимальное ускорение автомобиля можно выразить из уравнения динамического фактора: D=Ψ + где: δ –коэффициент учета вращающихся масс при разгоне автомобиля; Ψ –фактор сопротивления дороги; g –ускорение свободного падения 9, 8 (м/с2); j –ускорение автомобиля при разгоне.
j = Таким образом, для оценки всего диапазона доступных ускорений автомобиля, необходимо располагать его динамической характеристикой D=f(Vа) и значениями коэффициента учета вращающихся масс δ для всех передач в КПП трансмиссии. Вошедшую в уравнение (19) величину коэффициента учета вращающихся масс δ можно подобрать по таблице №6 Приложений или определить по формуле: δ =1+ σ 1* iк2+ σ 2 (20) где: σ 1, σ 2 –коэффициенты, зависящие от типа автомобиля, числа его колес и других вращающихся масс, их значения можно выбрать из таблицы №1 приложения или рассчитать по формуле (21); iк –передаточные числа КПП.
Коэффициент учета вращающихся масс показывает, во сколько раз сила, необходимая для разгона с заданным ускорением j поступательно движущихся и вращающихся масс автомобиля, больше силы, необходимой для разгона только поступательно движущихся масс. Так для одиночных транспортных средств при номинальной нагрузке то σ 1 и σ 2 принимают равной 0, 04. Если масса автомобиля с нагрузкой отличается от номинальной то σ 1 и σ 2 увеличивается в отношении ma/mнагр. Выражение (20) в этом случае примет вид: δ =1+(0, 05* iк2+0, 04)*
Для автопоезда массой ma и числом колес Zкa при массе автомобиля –тягача mт и числом его колес Zкт значения коэффициентов определяют:
σ 1=0, 04
Выражением (22) необходимо воспользоваться в случае когда невозможно бывает, определить значения коэффициентов для данного типа автомобиля. Динамический фактор представляет собой величину свободной силы тяги Рк приходящейся на единицу силы тяжести автомобиля: D= Воспользовавшись уравнением (23) необходимо вычислить значения динамического фактора для различных скоростей движения на каждой передаче и занести в таблицу №6.
Таблица №6 Динамические характеристики базовой машины
Сила сопротивления воздуха была найдена ранее, а ее значение для различных скоростей движения сведены в таблицу№5. Сила тяги Рк для всех передач в КПП рассчитана выше и их значения занесены в таблицу №4, что позволяет для каждого значения скорости движения V определить величину динамического фактора. В случаях, когда силы сопротивления движения автомобиля больше возможности автомобиля (Pк< Pw) или коэффициент сопротивления дороги больше динамического фактора (D< Ψ ), расчеты следует прекратить, поскольку это указывает на невозможность движения в этих условиях. Таблица№5 позволяет построить график разгонной характеристики автомобиля J=f(Vа) (рис.6). После построения графика необходимо проанализировать разгонную характеристику автомобиля и найти: максимальные ускорения (Jmax) на каждой из передач, соответствующие им скорости движения и определить оптимальные режимы разгона, то есть точки, в которых необходимо производить переключение передач.
Рис. 6. График ускорений автомобиля.
Далее для определения времени разгона автомобиля необходимо располагать графикам обратных ускорений. Известно из курса теоретической механики уравнения для ускорения j= dv/dt отсюда dt =1/jdv, подставив в него значение ускорения (19), можно определить требуемое время разгона автомобиля. Проинтегрировав получим:
Поскольку в уравнение (24) вошел динамический фактор, а определение аналитической зависимости его от скорости D=f(V) является громоздкой операцией, поэтому логично уравнение для времени разгона автомобиля решить графоаналитический. Для расчета следует построить график обратных ускорений для всех передач, значения ускорений которых вычислены и занесены в таблицу №6. Геометрический смысл определенного интеграла – это площадь «F» заключенная между осью абсцисс (v) и графиком 1/j.(рис. 7). Для определения площади необходимо выполнить следующие операции: Построить обратных ускорений, для всех передач, на миллиметровой бумаге воспользовавшись таблицей №6. Разбить ось абсцисс (скоростей) на интервалы 5 км/ч для грузовых, 10 км/ч для легковых, и восстановить на границах этих интервалов вертикали до пересечения с линиями графика. Измерить площади «F» под кривой 1/j=ƒ (v) и осью абсцисс (dv) для каждого интервала (см2) (25) и занести их в таблицу №6. Перевести полученные площади интервалов во время разгона, используя при этом масштаб (26):
Рис. 7. График обратных ускорений.
Δ t=F* μ t (сек), (25) где: μ t –масштаб времени разгона и определяется: μ t= μ v* μ 1/j /3, 6 (26) μ 1/j –масштаб обратных ускорений по оси ординат (с2/м*см); μ v –масштаб скорости по оси абсцисс (км/ ч.см). Полученные данные значений времени разгона в интервалах Δ t, последовательно сложить Σ t, занести их значения в таблицу№7. Полученные значения это время разгона автомобиля. При подсчете площадей интервалов, в местах, где кривые пересекаются для различных передач, следует считать, что в этой точке производится переключение передач.
Таблица №7
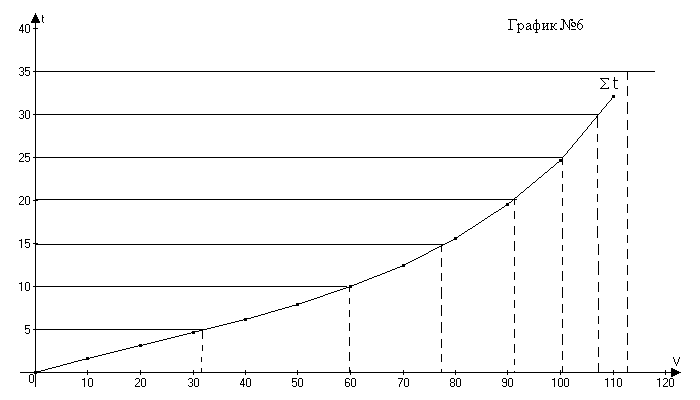
Последняя графа этой таблицы Σ t, это суммарное время разгона. Подсчет производить до скорости равной 0, 95 от Vmax. По полученным данным построить график времени разгона Σ t= f(V) (рис. 8) на миллиметровой бумаге.
Рис. 8. График времени разгона Путь разгона необходимый автомобилю для достижения заданной скорости, является важным показателем тяговой динамичности автомобиля, следовательно, элементом активной безопасности.
Как известно из физики, скорость определяется как первая производная от перемещения: V=ds/dt отсюда получим ds=Vdt. Определенный интеграл от ds имеет вид:
Для решения этого уравнения необходимо располагать аналитической зависимостью V=ƒ (t), расчет которой сложен. Поэтому целесообразней будет воспользоваться, графоаналитическим методом как в предыдущем случае, используя при этом график пути разгона (рис. 8) Σ t= f(V). Имея зависимость изменения скорости в процессе разгона автомобиля от времени, то есть V=f(t), геометрический смысл которого заключается в площади между графиком функции и осью (t). Для решения этой задачи необходимо выполнить следующие операции: Разбить ось абсцисс «V» графика №6 Σ t=f(V) на интервалы, как в предыдущем случае и провести перпендикуляры до пересечения с графиком. От полученных точек опустить перпендикуляры на ось ординат, который укажет предел скорости в заданном интервале. Измерить полученные площади, «F» между кривой Σ t и осью ординат для каждого интервала (см2), и занести их в таблицу №.8 Перевести полученные площади интервалов в путь разгона, используя при этом масштаб: S= F* μ s, (28) где: μ s –масштаб времени разгона, μ s= μ V * μ t /3, 6 (29)
μ t –масштаб времени разгона по оси абсцисс графика времени разгона (рис. 8) Σ t= f(V) (с/см), μ v –масштаб скорости по оси ординат (км/ ч.см).
Полученные данные занести в таблицу№8. Полученные данные значений пути разгона в интервалах Δ S последовательно сложить и получить Σ S «суммарный путь разгона». По полученным данным построить график пути разгона (рис. 9).
Таблица №8
Рис. 9. График пути разгона
Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1309; Нарушение авторского права страницы
 (18)
(18) (м/с2) (19)
(м/с2) (19) (21)
(21) ; σ 2=0, 04
; σ 2=0, 04  (22)
(22) (23)
(23)
 , (24)
, (24)
 , (27)
, (27)