
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Инерционное (апериодическое) звено
Инерционным (апериодическим) звеном 1 – го порядка называется такое звено, связь между выходом и входом определяется линейным заданным уравнением первого порядка вида
где Т – постоянная времени инерционного звена, обусловленная наличием массы, момента инерции, индуктивности ёмкости и т.д.; k – коэффициент усиления (или передачи). При линеаризации уравнений и соответствующем упрощении математического описания примерами инерционных звеньев могут служить многие объекты: генераторы, двигатели, электрические печи, а также исполнительные механизмы, электронные усилители, проходные четырёхполюсники, содержащие индуктивности или ёмкости. Применяя к (2.22) преобразование Лапласа при нулевых начальных условиях, получим операторное уравнение
Передаточная функция инерционного звена первого порядка на основании (2.23) запишется как
Решение уравнений (2.23) или (2.24) может быть представлено в виде
(рисунок 2.9, а).
Рисунок 2.9 – Переходная функция (а) и изображение (б) инерционного звена
Изображение инерционного звена на структурных схемах показано на рисунке 2.9, б. Частотная функция звена первого порядка получается путём замены р на jω в выражении (2.24)
Рисунок 2.10
Логарифмическая амплитудно-фазовая частотная характеристика имеет вид
(2.29) где Точное построение L(ω ) заключается в последовательном определении значений L(ω ) при различных частотах ω (таблица 2.1 и рисунок 2.11). Построение ЛАХ обычно упрощают, заменяя точную L’(ω ) асимптотами. Первая асимптота характеризует
Эта асимптота не зависит от частоты. Вторая асимптота характеризует т.е. принимают
Эта асимптота зависит от частоты. Если принять приращение частоты на одну декаду (ω 2=10 ω 1), то амплитуда изменится на величину
Следовательно, для второй асимптоты известен наклон, характеризующий убывание амплитуды на 1 лог при возрастании частоты на 1дек (она проходит под углом -45° в том масштабе, который дан в п. 1.3). Точка сопряжения обеих асимптот будет удовлетворять равенствам (2.30) и (2.31)
откуда Величина ω 0 определяется постоянной времени инерционного звена первого порядка и называется сопрягающей частотой.
Таблица 2.1
На основании изложенного можно сформулировать следующий порядок построения ЛАЧХ инерционного звена первого порядка, имеющего коэффициент усиления k: 1) определяется логарифм амплитуды частотной функции в логах; 2) рассчитывается сопрягающая частота в декадах; 3) через
Рисунок 2.11 – ЛАЧХ и ЛФЧХ инерционного звена первого порядка
Логарифмическая фазо-частотная характеристика инерционного звена первого порядка Для сопрягающей частоты фаза
Логарифмическую фазо-частотную характеристику целесообразно строить по шаблонам или по точкам относительно ординаты сопрягающей частоты (таблица 2.1). Примерами инерционного звена первого порядка являются: пассивные четырёхполюсники, состоящие из сопротивления и индуктивности или из сопротивления и ёмкости; термопара, генераторы постоянного и переменного тока; электрические двигатели (если вход – ток якоря, а выход – угловая скорость) и т.д., если уравнения можно представить в виде (2.22). Популярное: |
Последнее изменение этой страницы: 2016-04-11; Просмотров: 849; Нарушение авторского права страницы
 , (2.22)
, (2.22) , (2.23)
, (2.23) , (2.24)
, (2.24) (2.25)
(2.25)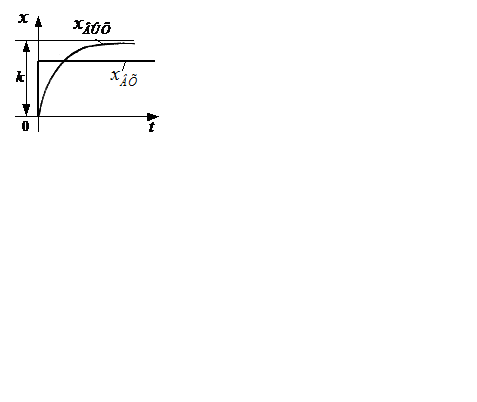 а) б)
а) б)
 , (2.26)
, (2.26) или (2.27)
или (2.27)
 где
где
 (2.28)
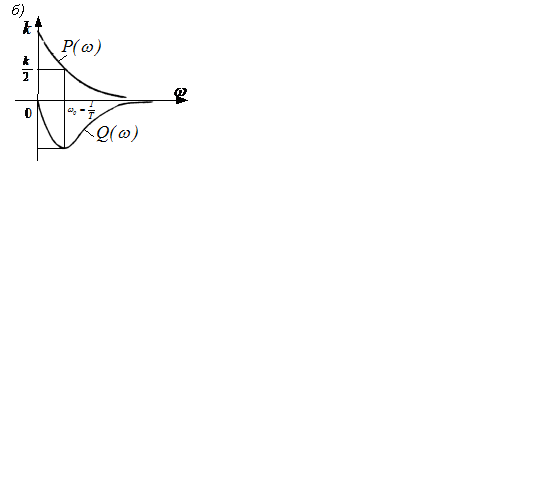
(2.28) Частотный годограф и частотные характеристики инерционного звена рассчитаны в таблице 2.1 и показаны на рисунке 2.10, а и б, в. Таким образом, АФЧХ инерционного звена представляет собой полуокружность радиуса
Частотный годограф и частотные характеристики инерционного звена рассчитаны в таблице 2.1 и показаны на рисунке 2.10, а и б, в. Таким образом, АФЧХ инерционного звена представляет собой полуокружность радиуса  с центром окружности, отстоящим от начала координат на
с центром окружности, отстоящим от начала координат на  , и при изменении частоты от
, и при изменении частоты от  до
до  вектор
вектор  поворачивает на угол, равный
поворачивает на угол, равный  .
.


 при малых частотах, когда величиной ω 2Т2 можно пренебречь, т.е. принимают
при малых частотах, когда величиной ω 2Т2 можно пренебречь, т.е. принимают (2.30)
(2.30) (2.31)
(2.31)






 проводится горизонтальная прямая до точки сопрягающей частоты; 4) проводится прямая с наклоном -1
проводится горизонтальная прямая до точки сопрягающей частоты; 4) проводится прямая с наклоном -1  после точки сопрягающей частоты от конца горизонтального участка ЛАЧХ (рисунок 2.11). Максимальное отклонение асимптотической ЛАЧХ L2 от действительной L1 равно 0, 15 лог при частоте ω 0 и незначительно при других частотах.
после точки сопрягающей частоты от конца горизонтального участка ЛАЧХ (рисунок 2.11). Максимальное отклонение асимптотической ЛАЧХ L2 от действительной L1 равно 0, 15 лог при частоте ω 0 и незначительно при других частотах.

