
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные правила перестановки элементов узлов и сумматоров
1. Два узла или два сумматора можно менять местами или объединять в один.
2. При переносе узла через сумматор по ходу сигнала следует добавить линию связи между боковыми ветвями, направленную по ходу сигнала и содержит звено с kУ = -1.
3. При переносе сумматора через узел по ходу сигнала необходимо добавить линию связи между боковыми ветвями напротив хода сигнала и содержащих звено с kУ = 1.
4. При переносе узла через линейное звено по ходу сигнала необходимо включить в ответвление обратное линейное звено.
5. При переносе узла через линейное звено против хода сигнала необходимо включить в ответвление такое же линейное звено.
6. При переносе сумматора через линейное звено по ходу сигнала необходимо включить в линию второго хода сумматора такое же линейное звено.
7. При переносе сумматора через линейное звено против хода сигнала необходимо включить в линию второго входа сумматора обратное линейное звено.
8. Ветви согласно-параллельных соединений звеньев можно менять местами.
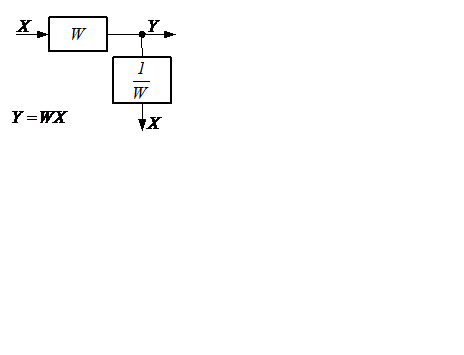
Y = (W1 + W2)X1 9. При встречно-параллельном соединении звеньев звенья можно менять местами, предварительно заменив их передаточные функции на обратные.
Применение приведенных правил даёт возможность производить самые различные преобразования структурных схем.
4 . Статика систем управления Статические характеристики САУ Статической характеристикой САУ называют зависимость между ее выходной величиной и входным воздействием, в установившемся режиме. Характер этой зависимости определяется статическими характеристиками звеньев, входящих в САУ и способами их соединений между собой. В качестве входных воздействий обычно рассматриваются задающее или основное возмущающее воздействие. В общем случае такие характеристики нелинейны. При построении САУ важно получить необходимый вид статических характеристик в заданном диапазоне изменением регулируемой величины. На практике пользуются двумя видами статических характеристик звена или САУ: 1. Зависимость между выходной регулируемой величиной и заданным воздействием при постоянной нагрузке, т.е. xВЫХ = f(x0) при xB = const, (4.1) где xВЫХ – выходная регулируемая величина; x0 –заданное воздействие; xB – возможное воздействие (нагрузка).
2. Зависимость между выходной регулируемой величиной и нагрузкой при постоянном заданном воздействии, т.е. xВЫХ = f(xB) при x0 = const. (4.2)
Например, для генератора постоянного тока зависимость напряжения генератора от тока возбуждения при разной нагрузке изображены на рисунке 4.1.
Аналогичные статические характеристики могут быть построены и для других элементов САУ. Анализ установившегося режима удобно производить на основе структурных схем. Структурная схема в этом случае составлена на основе алгебраических уравнений, описывающих поведение САУ в установившемся режиме.
Линеаризация статических характеристик Применяют линеаризацию статическую и динамическую. - Статическая линеаризация.
Рисунок 4.2 – Статическая (а) и динамическая (б) линеаризации
Кривая заменяется прямой (рисунок 4.2, а) в соответствии с каким-либо законом. Например, методом наименьших квадратов.
- Динамическая линеаризация. В точке А кривой находится
а) Функция одной переменной. Пусть дана статическая характеристика – непрерывная дифференцируемая функция y =f(x), причем точкой основного режима работы является точка А. Рисунок 4.3 – Динамическая линеаризация Разложим функцию в степенной ряд Тейлора в рабочей точке А
При рассмотрении изменения x в окрестностях точки А в небольшом диапазоне возможно ограничиться рассмотрением 2-х первых членов ряда Тейлора
(4.4)
где x – xA = Δ x – отклонение x от исходного значения; y – yA = Δ y – отклонение y от исходного значения. Тогда где
На структурной схеме последнее уравнение изобразится рисунок 4.4.
Рисунок 4.4
Пример 4.1. Дано уравнение y=x2+x+1 линеаризовать его в точке хА=1.. Находим производную Тогда k(А)=3.
б) Функция двух переменных. Пусть дана статическая характеристика в виде непрерывной дифференцируемой функции двух переменных (рисунок 4.5) z = f(x, y).(4.5)
Точкой основного режима работы является точка А.
Рисунок 4.5 – Функция двух переменных
\ Разложим функция в степенной ряд Тейлора в точке А:
(4.6) При небольшом отклонении x, y от рабочей точки А также допустимо ограничение двумя членами ряда Тейлора
Обозначим
тогда уравнение (4.7) запишется в виде
Обозначим На структурной схеме это уравнение отобразится (рисунок 4.6) Рисунок 4.6
Пример 4.2. Дана функция z=2x2+y+3, линеаризовать её в точке хА=1; уА=2. Найдём частные производные
4.3 Передаточная функция в установившемся режиме Структурная схема для установившегося режима составляется на основе уравнений элементов САУ в статике или на основе линеаризованной структурной схемы САУ формальным путём приравнивания оператора p к нулю. Пример 4.3. Дана структурная схема САУ. Вычислить общий коэффициент усиления (передаточную функцию в установившемся режиме).
Поведение системы в переходном процессе (в динамике) происходит в соответствии передаточной функцией
Общий коэффициент усиления (установившийся режим) получим, заменяя р на нуль.
Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1005; Нарушение авторского права страницы










 X2 )W
X2 )W





 ,
,
 .
.
 и заменяется при этом кривая линейным законом (рисунок 4.2, б).
и заменяется при этом кривая линейным законом (рисунок 4.2, б). (4.3)
(4.3) .
.
 ,
,  – коэффициент связи между y и x в окрестностях точки А или коэффициент усиления элемента в окрестности исходной точки.
– коэффициент связи между y и x в окрестностях точки А или коэффициент усиления элемента в окрестности исходной точки.




 .
. . (4.7)
. (4.7)

 ,
,  . (4.8)
. (4.8)
 .
.
 тогда kx=4; ky=2.
тогда kx=4; ky=2.
