
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Линейное (Векторное) пространство над полем
Определение 1. Множество А) любым Б) любому Эти операции должны удовлетворять следующим аксиомам. 1. Аксиомы сложения: А) Б) В) существует элемент Г) для любого 2. Аксиомы умножения на число: А) Б) В) Г) Элементы линейного пространства будем называть векторами. Примеры линейных пространств. 1) 2)
При таком определении сложения и умножения на число аксиомы, очевидно, выполнены. Линейно зависимые и независимые системы векторов. Пример В
имеет только одно — тривиальное — решение.
а, значит,
Если Определение 2. Векторы
Свойства линейной зависимости векторов: 1) векторы
2) если 3) если Доказательство: 4) если Доказательство: Размерность и базис.
Определение 7. Если в линейном пространстве Определение 8. Если Числа Если 1) 2) 3) Набор из Рассмотрим методы решения систем линейных уравнений. Метод Крамера Описание метода Для системы
с определителем матрицы системы
(i-ый столбец матрицы системы заменяется столбцом свободных членов).
В этой форме метод Крамера справедлив без предположения, что Пример Система линейных уравнений с вещественными коэффициентами:
Определители:
В определителях столбец коэффициентов при соответствующей неизвестной заменяется столбцом свободных членов системы. Решение:
Пример:
Определители:
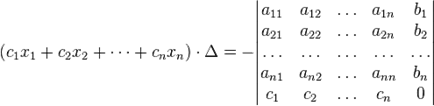
Теорема. Система n линейных уравнений с n неизвестными имеет единственное решение тогда и только тогда, когда определитель основной матрицы отличен от нуля. Неизвестные системы находятся по формулам Крамера Итак, методом Крамера можно решать системы с одинаковым числом уравнений и неизвестных и отличным от нуля определителем. Замечание. При решении методом Крамера системы 3-х уравнений с тремя неизвестными потребовалось вычислить 4 определителя 3-го порядка. При решении систем, например, 4-го порядка уже потребуется вычислять пять определителей 4-го порядка, что громоздко и нерационально. Поэтому целесообразно решать методом Крамера системы не выше 3-го порядка. Матричный метод Система линейных уравнений может быть кратко записана в виде матричного уравнения A*X=B. В этом нетрудно убедиться, перемножив матрицы A и X системы и приравняв к матрице B. (Матрицы равны, если равны их соответствующие элементы.) Решение системы имеет следующий вид: X=A-1*B Таким образом, решение системы состоит из двух этапов. 1. Нахождение матрицы, обратной основной матрице системы; 2. Умножение полученной обратной матрицы на матрицу-столбец свободных членов. Так как нахождение обратной матрицы связано с вычислением определителя, то матричным методом можно решать системы, имеющие невырожденную основную матрицу. Замечание. Решение систем матричным методом нецелесообразно проводить для случая n> 3, так как при нахождении обратной матрицы, уже для матрицы 4-го порядка, придется вычислять 16 определителей 3-го порядка. Кроме того, система должна иметь одинаковое число уравнений и неизвестных и отличный от нуля определитель основной матрицы. Т.е. матричный метод имеет те же преимущества (простота решения систем невысокого порядка) и те же недостатки, что и метод Крамера. Рассмотрим метод решения линейных систем с любым числом уравнений и неизвестных (который является универсальным)- метод последовательного исключения неизвестных или Метод Гаусса. Описание метода Пусть исходная система выглядит следующим образом.
Матрица Тогда, согласно свойству элементарных преобразований над строками, основную матрицу этой системы можно привести к ступенчатому виду (эти же преобразования нужно применять к столбцу свободных членов):
При этом будем считать, что базисный минор (ненулевой минор максимального порядка) основной матрицы находится в верхнем левом углу, то есть в него входят только коэффициенты при переменных Тогда переменные Если хотя бы одно число Пусть Перенесём свободные переменные за знаки равенств и поделим каждое из уравнений системы на свой коэффициент при самом левом
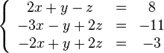
Если свободным переменным системы (2) придавать все возможные значения и решать новую систему относительно главных неизвестных снизу вверх (то есть от нижнего уравнения к верхнему), то мы получим все решения этой СЛАУ. Так как эта система получена путём элементарных преобразований над исходной системой (1), то по теореме об эквивалентности при элементарных преобразованиях системы (1) и (2) эквивалентны, то есть множества их решений совпадают. Пример Покажем, как методом Гаусса можно решить следующую систему:
Обнулим коэффициенты при
Теперь обнулим коэффициент при
В результате мы привели исходную систему к треугольному виду, тем самым закончим первый этап алгоритма. На втором этапе разрешим полученные уравнения в обратном порядке. Имеем:
Таким образом исходная система решена. В случае, если число уравнений в совместной системе получилось меньше числа неизвестных, то тогда ответ будет записываться в виде фундаментальной системы решений.
Суть метода состоит в том, что путем элементарных преобразований из всех уравнений системы, кроме первого, исключаем неизвестное x1, далее из всех уравнений, кроме первого и второго, исключаем неизвестное x2, и т.д. На практике принято все эти действия проводить не над уравнениями системы, а над строками расширенной матрицы. К элементарным относятся следующие преобразования: 1) умножение (деление) на число, отличное от нуля, элементов какой-либо строки; 2) сложение элементов какой-либо строки с соответствующими элементами другой строки, предварительно умноженными на ненулевое число; 3) перестановка строк матрицы; 4) вычеркивание из матрицы нулевых строк, одной из двух одинаковых строк, одной из двух пропорциональных строк, вычеркиваются строки, линейно-зависимые от других строк. В результате элементарных преобразований получается матрица, эквивалентная исходной, т.е. матрица, имеющая такой же ранг. На ее основе составляется система, эквивалентная исходной, но более простая в решении и анализе, так как в последнем уравнении останется только одно неизвестное, в предпоследнем два и т.д. Этот процесс называется прямым ходом метода Гаусса. Отметим, что параллельно при этом решается вопрос о совместности системы и количестве решений (единственное или бесконечное множество.) Обратный ход состоит в следующем: из последнего уравнения находим единственное входящее в него неизвестное, подставляем полученное значение в предпоследнее уравнение и находим второе неизвестное и т.д. пока не дойдем до первого уравнения, в котором уже найдены все неизвестные, кроме одного. Таким образом получим совокупность значений неизвестных, образующих решение системы.
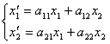
5. Линейные преобразования линейного пространства над полем, характеристический и минимальный многочлены линейных преобразований. Собственные значения и собственные вектора линейного преобразования. Нормальные формы матрицы, с помощью которой задано линейное преобразование линейного пространства над полем. Граф линейного преобразования. Евклидово пространство и его свойства. Ортонормированный базис. Линейные преобразования линейного пространства над полем Пусть V линейное пространство над полем P. Пусть дано n-мерное действительное линейное пространство, которое обозначим через Vп. Рассмотрим преобразование этого пространства, т. е. отображение, переводящее каждый вектор а пространства Vп в некоторый вектор а ’ этого же пространства. Вектор а ' называется образом вектора а при рассматриваемом преобразовании. Если преобразование обозначено через j, то образ вектора а условимся записывать не через j(а) или j а, что читателю было бы привычнее, а через a j. Таким образом, а ' = а j. Преобразование j линейного пространства Vп называется линейным преобразованием этого пространства, если сумму любых двух векторов а, b оно переводит в сумму образов этих векторов, ( a + b ) j = a j + b j (1) а произведение любого вектора а на любое число а переводит в произведение образа вектора а на это же число а, (a a ) j=a( a j) (2) Из этого определения немедленно вытекает, что линейное преобразование линейного пространства переводит любую линейную комбинацию данных векторов а 1, а 2, …, а n, в линейную комбинацию (с теми же коэффициентами) образов этих векторов (a1 а 1+ a2 а 1+… an а 1)j = a1( а 1j) +a2( а 2j) + …+an( а nj) (3) Утверждение: При любом линейном преобразовании j линейного пространства Vn нулевой вектор 0 остается неподвижным 0 j= 0 а образом вектора, противоположного для данного вектора a , служит вектор, противоположный для образа вектора а, Примеры линейных преобразований – тождественное и линейное преобразование Пусть e =( е 1, е 2, …, е n)т - базис линейного пространства Vn. Так как всякий вектор этого пространства представляется в виде линейной комбинации векторов базы (4), то, ввиду (3), образ вектора а с теми же коэффициентами выражается через образы векторов (4). Иными словами, всякое линейное преобразование j пространства Vn однозначно определяется заданием образов е 1j, е 2j, ..., е nj всех векторов фиксированной базы (4). Какова бы ни была упорядоченная система из n векторов пространства е 1, е 2, ..., е n (5) существует, притом единственное, такое линейное преобразование j этого пространства, что (5) служит системой образов векторов базы (4) при этом преобразовании, e ij= c i i=1, 2, …, n (6) Единственность преобразования j уже доказана выше и нужно доказать лишь его существование. Определим преобразование j следующим образом: если а – произвольный вектор пространства и
Докажем линейность этого преобразования. Если
Если же g — любое число, то
Что же касается справедливости равенств (6), то она вытекает из определения (7) преобразования j, так как все координаты вектора е 1 в базе (4) равны нулю, кроме i-и координаты, равной единице. Нами установлено, следовательно, взаимно однозначное соответствие между всеми линейными преобразованиями линейного пространства Vn и всеми упорядоченными системами (5) из n векторов этого пространства. Всякий вектор с1 обладает, однако, определенной записью в базе(4),
Из координат вектора с1 в базе (4) можно составить квадратную матрицу А = (aij), (9) беря в качестве ее i-й строки строку координат вектора с i, i = 1, 2, ......, n. Так как система (5) была произвольной, то матрица A будет произвольной квадратной матрицей порядка n с действительными элементами. Мы имеем, таким образом, взаимно однозначное соответствие между всеми линейными, преобразованиями пространства Vnи всеми квадратными матрицами порядка n; это соответствие зависит, конечно, от выбора базы (4). Будем говорить, что матрица А задает линейное преобразование j в базе (4), или, короче, что А есть матрица линейного преобразования j в базе (4). Если через е j мы обозначим столбец, составленный из образов векторов базы (4), то из (6), (8) и (9) вытекает следующее матричное равенство, полностью описывающее связи, существующие между линейным преобразованием j, базой е и матрицей А, задающей это линейное преобразование в этой базе: еj = А е. (10) Покажем, как, зная матрицу А линейного преобразования j в базе (4), по координатам вектора а в этой базе найти координаты его образа а j. Если
a j= (a1, a2, …, an) ( е j). Используя (10) и учитывая, что ассоциативность умножения матриц легко проверяется и в том случае, когда одна из матриц является столбцом, составленным из векторов, мы получаем: a j= [(a1, a2, …, an)A] е j. Отсюда следует, что строка координат вектора а j равна строке координат вектора а, умноженной справа на матрицу А линейного преобразования j, все в базе (4). Пример. Пусть в базе е 1, е 2, е 3 трехмерного линейного пространства линейное преобразование j задается матрицей
Если a =5 е 1+ е 2-2 е 3 то
т. е. a j = - 9 e 1+16 e 2 Связь между матрицами линейного преобразования в разных базах. Разумеется, что матрица, задающая линейное преобразование, зависит от выбора базы. Покажем, какова связь между матрицами, задающими в разных базах одно и то же линейное преобразование. Пусть даны базы е к е ' с матрицей перехода Т, е '= Tе (11) и пусть линейное преобразование j задается в этих базах соответственно матрицами А и А',
Второе из равенств (12) приводит, ввиду (11), к равенству Однако Действительно, если (ti1, ti2, …, tin) — i-я строка матрицы T, то (ti1 e 1+ ti2 e 2+…+ tin e n)j= ti1( e 1j)+ ti2( e 2j)+…+ tin( e nj). Таким образом, ввиду (12), (T e )j= T( e j)= T(A e )= (TA) e A¢ (T e )= (A¢ T) e т. е. (ТА) е = (А'Т) е. Если хотя бы для одного i, 1£ i £ n, i -я строка матрицы ТА будет отлична от i-й строки матрицы А'Т, то две различные линейные комбинации векторов е 1, е 2, ..., е n окажутся равными друг другу, что противоречит линейной независимости базы е. Таким образом, TA= А'Т откуда, ввиду невырожденности матрицы перехода Т, А'=T АТ-1, А=T-1АТ (13) Заметим, что квадратные матрицы В и С называются подобными, если они связаны равенством C=Q-1BQ где Q — некоторая невырожденная матрица. При этом говорят, что матрица С получена из матрицы В трансформированием матрицей Q. Доказанные выше равенства (13) можно сформулировать, таким образом, в виде следующей важней теоремы: Матрицы, задающие одно и то же линейное преобразование в разных базах, подобны между собой. При этом матрица линейного преобразования j в базе е ' получается трансформированием матрицы этого преобразования в базе е матрицей перехода от базы е ' к базе е. Подчеркнем, что если матрица А задает линейное преобразование j в базе е, то любая матрица В, подобная матрице А, B=Q-1AQ также задает преобразование j в некоторой базе, а именно в базе, получающейся из базы е при помощи матрицы перехода Q-1. Собственные значения и собственные векторы линейного преобразования. Характеристический многочлен линейного пространства Определение: Пусть L – заданное n- мерное линейное пространство. Ненулевой вектор При этом число λ называется собственным значением ( характеристическим числом) линейного преобразования А, соответствующего вектору Определение: Если линейное преобразование А в некотором базисе Следует отметить, что характеристический многочлен линейного преобразования не зависит от выбора базиса. Рассмотрим частный случай. Пусть А – некоторое линейное преобразование плоскости, матрица которого равна Если преобразование А имеет собственный вектор с собственным значением λ , то А Т.к. собственный вектор Полученное уравнение является характеристическим уравнением линейного преобразования А. Таким образом, можно найти собственный вектор Понятно, что если характеристическое уравнение не имеет действительных корней, то линейное преобразование А не имеет собственных векторов. Следует отметить, что если Действительно, Т.к. характеристическое уравнение может иметь два различных действительных корня λ 1 и λ 2, то в этом случае при подстановке их в систему уравнений получим бесконечное количество решений. (Т.к. уравнения линейно зависимы). Это множество решений определяет две собственные прямые. Если характеристическое уравнение имеет два равных корня λ 1 = λ 2 = λ , то либо имеется лишь одна собственная прямая, либо, если при подстановке в систему она превращается в систему вида: Пример. Найти характеристические числа и собственные векторы линейного преобразования А, матрица линейного преобразования А = Составим характеристическое уравнение: (1 - λ )((5 - λ )(1 - λ ) - 1) - (1 - λ - 3) + 3(1 - 15 + 3λ ) = 0 (1 - λ )(5 - 5λ - λ + λ 2 - 1) + 2 + λ - 42 + 9λ = 0 (1 - λ )(4 - 6λ + λ 2) + 10λ - 40 = 0 4 - 6λ + λ 2 - 4λ + 6λ 2 - λ 3 + 10λ - 40 = 0 -λ 3 + 7λ 2 – 36 = 0 -λ 3 + 9λ 2 - 2λ 2 – 36 = 0 -λ 2(λ + 2) + 9(λ 2 – 4) = 0 (λ + 2)(- λ 2 + 9λ - 18) = 0 Собственные значения: λ 1 = -2; λ 2 = 3; λ 3 = 6; 1) Для λ 1 = -2: Если принять х1 = 1, то Собственные векторы: 2) Для λ 2 = 3: Если принять х1 = 1, то Собственные векторы: 3) Для λ 3 = 6: Если принять х1 = 1, то Собственные векторы: Минимальный многочлен Минимальный многочлен линейного преобразования. Докажем сначала следующее утнержденне: Если матрицы А 'и В подобны и если многочлен Действительно, пусть
Трансформируй обе части этого равенства матрицей С, получаем
Отсюла следует, что подобные матрицы обладают одним и тем же минимальным многочленом. Пусть теперь Используя операции над линейными преобразованиями, можно ввести понятие значении многочлена
из кольца P[λ ] при λ , равном линейному преобразованию
, где Мы скажем, далее, что многочлен
где Учитывая связь между операциями нал линейными преобразованиями и над матрицами, читатель без труда докажет, что минимальный многочлен линейного преобразования Нормальная форма матрицы. Предположим сначала, что рассматриваются проклюльиыекомПЛексные квадратичные формы и, вместе с тем, допускается употребление невырожденных линейных преобразований также с произвольными комплексными коэффициентами. Мы знаем, что всякая квадратичная форма fот n неизвестных, имеющая ранг r, приводится к каноническому виду
Оно приводит форму f к виду Граф. 1. Наглядно граф можно представить как некоторое множество точек плоскости Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 2794; Нарушение авторского права страницы
 элементов произвольной природы
элементов произвольной природы  называется линейным пространством над полем действительных чисел
называется линейным пространством над полем действительных чисел  , если
, если поставлен в соответствие элемент
поставлен в соответствие элемент  , называемый суммой элементов
, называемый суммой элементов  .
. и любому
и любому  поставлен в соответствие элемент
поставлен в соответствие элемент  , называемый произведением числа
, называемый произведением числа  на элемент
на элемент  .
. (коммутативность);
(коммутативность);  (ассоциативность);
(ассоциативность);  такой, что
такой, что  для любого
для любого  . Элемент
. Элемент  называется нулевым;
называется нулевым;  существует элемент
существует элемент  , называется противоположным, такой, что
, называется противоположным, такой, что  .
. (дистрибутивность);
(дистрибутивность);  (дистрибутивность);
(дистрибутивность);  (ассоциативность);
(ассоциативность); 
 - множество действительных чисел с обычными операциями сложения и умножения.
- множество действительных чисел с обычными операциями сложения и умножения. - множество упорядоченных наборов из
- множество упорядоченных наборов из  чисел. Положим:
чисел. Положим: 
 .
. векторы
векторы  ,
,  и
и  линейно независимы, так как уравнение
линейно независимы, так как уравнение
 и
и  являются линейно зависимыми, так как
являются линейно зависимыми, так как ,
, 
 , то выражение
, то выражение  называется линейной комбинацией векторов
называется линейной комбинацией векторов  .
. называются линейно независимыми, если линейная комбинация
называются линейно независимыми, если линейная комбинация  только для
только для  . Если среди
. Если среди  есть ненулевые, то векторы
есть ненулевые, то векторы  называются линейно зависимыми.
называются линейно зависимыми. линейно зависимы:
линейно зависимы:  .
. линейно зависимы,
линейно зависимы,  , то
, то  - линейно зависимы.
- линейно зависимы. - линейно зависимы, то хотя бы один из них является линейной комбинацией остальных.
- линейно зависимы, то хотя бы один из них является линейной комбинацией остальных. - линейно зависимы, следовательно,
- линейно зависимы, следовательно,  и, например,
и, например,  , поэтому
, поэтому 
 - линейно независимы, а
- линейно независимы, а  - линейно зависимы, то
- линейно зависимы, то  - является линейной комбинацией
- является линейной комбинацией  .
. - линейно зависимы, следовательно,
- линейно зависимы, следовательно,  .Если
.Если  , то
, то  и не все коэффициенты равны нулю, что противоречитнезависимости
и не все коэффициенты равны нулю, что противоречитнезависимости  .Поэтому
.Поэтому  и
и  .
.

 существует
существует  линейно независимых векторов, а любые
линейно независимых векторов, а любые  векторов линейно зависимы, то линейное пространство
векторов линейно зависимы, то линейное пространство  называется
называется  мерным. Число
мерным. Число  называется размерностью пространства и обозначается
называется размерностью пространства и обозначается  .
. , то система из
, то система из  линейно независимых векторов
линейно независимых векторов  , заданных в определенном порядке, называется базисом пространства
, заданных в определенном порядке, называется базисом пространства  .
. называются координатами вектора в базисе
называются координатами вектора в базисе  . Будем писать
. Будем писать  .
. ,
,  , то
, то ;
;  ;
;  .
. координат
координат  можем считать вектором арифметического пространства
можем считать вектором арифметического пространства  .
. линейных уравнений с
линейных уравнений с 
 , отличным от нуля, решение записывается в виде
, отличным от нуля, решение записывается в виде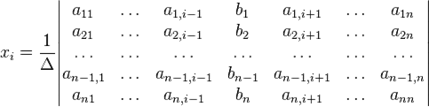
 и
и  , либо набор
, либо набор  состоят не из элементов кольца коэффициентов системы, а какого-нибудь модуля над этим кольцом. В этом виде формула Крамера используется, например, при доказательстве формулы для определителя Грама и Леммы Накаямы.
состоят не из элементов кольца коэффициентов системы, а какого-нибудь модуля над этим кольцом. В этом виде формула Крамера используется, например, при доказательстве формулы для определителя Грама и Леммы Накаямы.







 где
где  - главный определитель системы, т.е. определитель основной матрицы A,
- главный определитель системы, т.е. определитель основной матрицы A,  определитель неизвестного xk, который получается при замене столбца с номером k в главном определителе на столбец свободных членов B, k=1, 2, … n.
определитель неизвестного xk, который получается при замене столбца с номером k в главном определителе на столбец свободных членов B, k=1, 2, … n.
 называется основной матрицей системы,
называется основной матрицей системы,  — столбцом свободных членов.
— столбцом свободных членов.
 [4].
[4]. , где
, где  , то рассматриваемая система несовместна, т.е. у неё нет ни одного решения.
, то рассматриваемая система несовместна, т.е. у неё нет ни одного решения. для любых
для любых  (
(  , где
, где  — номер строки):
— номер строки):  ,
, 
 и
и  , соответственно:
, соответственно: 
 в третьей строке, вычтя из неё вторую строку, умноженную на
в третьей строке, вычтя из неё вторую строку, умноженную на  :
: 
 из третьего;
из третьего;  из второго, подставив полученное
из второго, подставив полученное 
 из первого, подставив полученные
из первого, подставив полученные  - его запись в базе (4), то положим
- его запись в базе (4), то положим (7)
(7) - любой другой вектор пространства, то
- любой другой вектор пространства, то

 (8)
(8) то
то  что равносильно матричному равенству
что равносильно матричному равенству

 (12)
(12)

 L называется собственным вектором линейного преобразования А, если существует такое число, что выполняется равенство: A
L называется собственным вектором линейного преобразования А, если существует такое число, что выполняется равенство: A  .
. .
. ,
,  , …,
, …,  имеет матрицу А =
имеет матрицу А =  , то собственные значения линейного преобразования А можно найти как корни λ 1, λ 2, …, λ n уравнения:
, то собственные значения линейного преобразования А можно найти как корни λ 1, λ 2, …, λ n уравнения:  Это уравнение называется характеристическим уравнением, а его левая часть - характеристическим многочленом линейного преобразования А.
Это уравнение называется характеристическим уравнением, а его левая часть - характеристическим многочленом линейного преобразования А. . Тогда преобразование А может быть задано формулами:
. Тогда преобразование А может быть задано формулами: 
 ;
;  в некотором базисе
в некотором базисе  .
. или
или 

 . Если учесть, что векторы имеют одно начало, то эти векторы образуют так называемое собственное направление или собственную прямую.
. Если учесть, что векторы имеют одно начало, то эти векторы образуют так называемое собственное направление или собственную прямую.  . Эта система удовлетворяет любым значениям х1 и х2. Тогда все векторы будут собственными, и такое преобразование называется преобразованием подобия.
. Эта система удовлетворяет любым значениям х1 и х2. Тогда все векторы будут собственными, и такое преобразование называется преобразованием подобия.  .
.


 х2 = 0; x3 = -1;
х2 = 0; x3 = -1; 

 х2 = -1; x3 = 1;
х2 = -1; x3 = 1; 

 х2 = 2; x3 = 1;
х2 = 2; x3 = 1; 
 аннулируется матрицей А, то он аннулируется и матрицей В.
аннулируется матрицей А, то он аннулируется и матрицей В.

 будет линейное преобразование n-мерного линейного пространства над полем P. Матрицы, задающие это преобразование в разных базах пространства, подобны между собой. Общий минимальный многочлен этих матриц называется минимальным многочленом линейного преобразования
будет линейное преобразование n-мерного линейного пространства над полем P. Матрицы, задающие это преобразование в разных базах пространства, подобны между собой. Общий минимальный многочлен этих матриц называется минимальным многочленом линейного преобразования 

 -тождественное преобразование.
-тождественное преобразование. аннулируется линейным преобразованием
аннулируется линейным преобразованием 
 — нулевое преобразование.
— нулевое преобразование. , где все коэффициенты c1, c2, .... crотличны от нуля. Пользуясь тем, что из всякого комплексного числа извлекается квадратный корень, выполним следующее невырожденное линейное преобразование:
, где все коэффициенты c1, c2, .... crотличны от нуля. Пользуясь тем, что из всякого комплексного числа извлекается квадратный корень, выполним следующее невырожденное линейное преобразование: 
 , называемому нормальным , это—просто сумма квадратов rнеизвестных с коэффициентами, равными единице.
, называемому нормальным , это—просто сумма квадратов rнеизвестных с коэффициентами, равными единице.