|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
СТРУКТУРА СРЕДСТВ АВТОМАТИЗАЦИИСтр 1 из 10Следующая ⇒
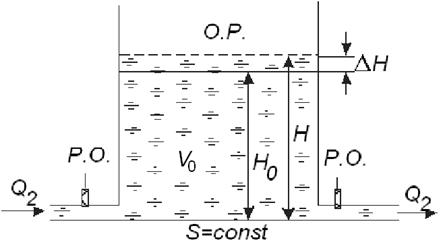
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ В ТЕОРИИ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ Любой агрегат, аппарат или устройство, в котором требуется что-либо регулировать, в автоматике называется объектом регулирования (объектом управления). Тот параметр, который требуется регулировать, называют регулируемым параметром. То значение параметра, которое необходимо поддерживать постоянным или изменять по какому-либо закону, называют заданным значением. В любом объекте регулирования имеется приток среды или энергии в объект и её расход из объекта. Расход среды или энергии из объекта поступает потребителю, который может изменять его по своему усмотрению. Те устройства, с помощью которых можно изменять расходы сред, называют регулирующими органами (регулирующие клапаны, заслонки, направляющие аппараты, питатели и т.п.). Любой объект регулирования может находиться в двух режимах работы: статическом (установившемся) и динамическом. В статическом (установившемся) режиме приток среды или энергии в объект равен ее расходу из объекта. В объекте никаких изменений нет, регулируемый параметр не изменяется, постоянен. Его принимают за заданное значение. Регулирования не требуется. В динамическом режиме приток среды в объект не равен ее расходу из объекта. В объекте начинаются изменения, параметры начинают изменяться. В этом режиме требуется регулирование. Причиной возникновения небаланса между притоком среды или энергии в объект и ее расходом из объекта в основном является потребитель. Влияние потребителя на объект регулирования называют внешним возмущением. Рассмотрим эти понятия на наглядном примере бака с водой, как объекта регулирования уровня воды (рис.1).
Рис.1. 1) Статический режим: Q1 = Q2; DQ = Q1 – Q2 = 0. Н = const = Н0. 2) Динамический режим: Q1 ¹ Q2; ±DQ = Q1-Q2; Н - изменяется. При регулировании рассматриваются отклонения уровня от заданного значения ±DН = Н – Н0. При отклонении уровня воды на +DН (потребитель уменьшил расход Q2), оператор при ручном управлении будет прикрывать регулирующий орган на притоке, уменьшая Q1. При новом равенстве расходов Q1 и Q2 опять установится баланс расходов, и уровень установится на каком-то значении. Следовательно, основной смысл регулирования сводится к установлению нового баланса между притоком среды или энергии и ее расходом из объекта. Позиционные элементы. Подразделяются на следующие виды: 1) пропорциональные; 2) апериодические (инерционные) первого порядка; 3) апериодические (инерционные) второго порядка; 4) колебательные. Пропорциональный элемент (усилительный) Уравнение: хвых=k× хвх, (7.6) где k – коэффициент усиления. Передаточная функция
Частотные характеристики
Сдвига по фазе нет. Разгонная характеристика показана на рис. 23. Она строится по уравнению элемента
Апериодический (инерционный) элемент первого порядка Дифференциальное уравнение элемента:
где k – коэффициент усиления; Т – постоянная времени.
Следовательно, разгонная характеристика элемента представляет собой экспоненту. Постоянная времени Т представляет собой отрезок времени, отсекаемый проекцией касательной, проведенной к кривой разгона в начальной точке при t0. При t=¥ хвых устанавливается на новом значении хвых, уст. Уравнение статики элемента получается из дифференциального уравнения,
из которого легко получают коэффициент усиления k по экспериментальным данным. Передаточная функция получается из дифференциального уравнения
Частотная передаточная функция получается заменой оператора р на jw
где Амплитудно-частотная характеристика
При частоте w, изменяющейся от 0 до ¥ А(w) изменяется от k до 0, а j(w) ® от 0 до (-p/2). Отрицательное значение j(w) означает, что в элементе происходит запаздывание в прохождении сигнала. Примеры этого элемента: 1) одноемкостные статические объекты (рис. 25а); 2) термопары и термометры сопротивления (рис. 25б); 3) электрическая цепь, содержащая емкость и электрическое сопротивление (рис. 25в).
Рис. 25. Примеры инерционных элементов первого порядка: а – одноемкостный статический объект регулирования уровня воды; б – термопара; в – электрическая цепочка сопротивление R – емкость C Апериодический (инерционный) элемент второго порядка Дифференциальное уравнение элемента:
При определенном соотношении коэффициентов Т1 и Т2 получим апериодический элемент второго порядка. Корни уравнения – действительные числа. Операторный вид уравнения:
Характеристическое уравнение
Его корни получаются из решения этого квадратного алгебраического уравнения
Разгонная характеристика элемента
При замене этого элемента на апериодический элемент 1го порядка, в точке перегиба кривой разгона проводят касательную, ограниченную начальным значением хвых, 0 и его конечным значением хвых, уст. Подкасательная (проекция касательной на ось времени) численно равна постоянной времени Т. Промежуток времени от t0 до начал отсчета постоянной времени Т называют переходным запаздыванием tп. Передаточная функция элемента получается из уравнения, записанного в операторном виде
Полином по р в знаменателе может быть разложен на множители. Тогда
где Т3 и Т4 – новые постоянные времени. Связь постоянных времени Тогда передаточную функцию апериодического элемента 2-го порядка можно представить в виде
То есть, этот элемент может быть представлен последовательным соединением двух апериодических элементов 1-го порядка с постоянными времени Т3 и Т4 и коэффициента усиления k и 1. Такое представление упрощает получение частотных характеристик апериодического элемента 2-го порядка
Следовательно, АЧХ будет
а ФЧХ –
Этот метод позволяет легко определить АЧХ и ФЧХ сложных элементов, которые могут быть представлены последовательным соединением простейших элементов. Колебательные элементы Уравнение элемента
Корни этого уравнения – комплексные числа. Соотношения между постоянными времени Т1 и Т2 следует из решения характеристического уравнения
При Т1 < 2Т2 имеем комплексные корни
Из этого следует, что процесс изменения хвых во времени будет колебательным Разгонная характеристика
Примером колебательных элементов могут служить пневматические, гидравлические и электрические демпферы (гасители колебаний). На рис. 28 показана электрическая цепочка, состоящая из индуктивности L, сопротивления R и емкости С.
Интегрирующие элементы Различают два типа интегрирующих элементов: 1) идеальный; 2) реальный. 1. Идеальный интегрирующий элемент Уравнение элемента
Его решение
При хвх=const При t=Т имеем хвых=хвх. Передаточная функция
Частотная передаточная функция
Частотные характеристики
Этот элемент, так же, как и предыдущие, дает запаздывание в прохождении сигнала на фазовый угол j(w). Об этом говорит знак «–» - отрицательные углы j(w). Примеры: 1) одноемкостные астатические объекты; 2) исполнительные механизмы систем регулирования малой мощности. 2. Реальный интегрирующий элемент Уравнение
Разгонная характеристика
Передаточная функция получается из записи дифференциального уравнения в операторном виде
Следовательно, этот элемент является сложным и его можно представить последовательным соединением идеального интегрирующего элемента и апериодического элемента первого порядка с постоянной времени Частотные характеристики
Примером этих элементов может служить двухемкостный астатический объект, представленный на рис. 31.
Изменение уровня воды во втором баке Н2 будет происходить по разгонной характеристике (рис. 25).
Дифференцирующие элементы Различают два типа дифференцирующих элементов: 1) идеальный; 2) реальный. Идеальный дифференцирующий элемент Такого элемента практически не существует. Он введен как теоретическое понятие, позволяющее упрощать рассмотрение поведения систем регулирования. Уравнение элемента
где Тд – постоянная времени дифференцирования (время дифференцирования). Разгонная характеристика элемента
Так как хвх=const до t0 и после t0, то производная в момент времени t0 стремится к ¥ и тут же возвращается в нуль. Передаточная функция
Частотные характеристики (р®jw)
Следовательно, этот элемент дает опережение сигнала по фазе на угол p/2. Реальный дифференцирующий элемент Уравнение
Решением этого уравнения является функция
Передаточная функция элемента
Следовательно, реальный дифференциальный элемент можно представить как последовательное соединение идеального дифференцирующего элемента и апериодического элемента первого порядка с постоянной времени Тд и коэффициентом усиления k=1. Частотные характеристики
Примеры элемента: 1. Электрическая цепочка, содержащая емкость С и сопротивление R, когда выходной сигнал снимается с сопротивления R.
2. Элементы с такой электрической цепочкой используются при создании ПИ- закона регулирования (пропорционально-интегрального), включением их в качестве обратной связи регулятора. 3. Эти элементы используются при создании дифференцирующих устройств и динамических связей между регуляторами.
Элементы с запаздыванием Это элементы, передающие входной сигнал в неизменном виде на какое-либо расстояние (хвых = хвх). К ним относятся различного вида транспортеры для перемещения сыпучего груза, длинные водоводы, паропроводы, газопроводы. Пример – ленточный транспортер, для передачи сыпучих материалов (рис. 35).
Уравнение элемента
Передаточная функция элемента получена с использованием преобразования Лапласа
Ее можно получить через частотную передаточную функцию
Авых=Авх. Обратной заменой jw®р имеем
Уравнение элемента в операторном виде будет
Частотные характеристики
Неустойчивые объекты Они получаются из общего уравнения объекта при r< 0. Тогда имеем
При km=kl получим
Решением этого уравнения будет экспонента, с положительным показателем. Следовательно, параметр j с течением времени будет неограниченно расти. Сравнение различных типов объектов по разгонным характеристикам приведено на рис. 40.
Многоемкостные объекты Различают два типа многоемкостных объектов: 1 – сложные объекты с сосредоточенной емкостью; 2 – объекты с распределенной по длине емкостью. Отличие этих объектов состоит в дифференциальных уравнениях, описывающих их поведение в динамике: объекты с сосредоточенной емкостью описываются дифференциальными уравнениями в полных производных, а объекты с распределенной емкостью описываются дифференциальными уравнениями в частных производных. Многоемкостные объекты с сосредоточенной емкостью могут быть статическими и астатическими, а объекты с распределенной емкостью – статическими. В статических объектах с течением времени выходной параметр устанавливается на новом значении после нанесения возмущения на входе. В астатических объектах выходной параметр с течением времени будет изменяться с постоянной скоростью. В сложных многоемкостных объектах может присутствовать транспортное и переходное запаздывание. В большинстве случаев нет возможности составить уравнения объекта, адекватно описывающее его поведение в динамических режимах. Это связано со сложностью протекающих в них процессов, невозможностью учета всех параметров, влияющих на регулируемую величину, сложностью линеаризации и т.п. Поэтому свойства многоемкостного объекта на практике определяют по разгонным характеристикам и производят его замену на соединение простейших элементов, получив упрощенные уравнения объектов. И – закон регулирования Структурная схема этого закона представлена на рис. 50.
Основные элементы регулятора: измерительное устройство И.У., элемент сравнения Э.С.; усилитель У.У.; исполнительный механизм И.М. Они соединены в регуляторе последовательно, поэтому для получения передаточной функции регулятора необходимо знать передаточные функции этих элементов, считая их простейшими. 1. И.У. Это датчик для измерения параметра j (давление, температура, уровень и т.п.). Будем считать его пропорциональным элементом. Тогда 2. Э.С. В элементе сравнения происходит сложение сигналов от датчика и задатчика с учетом знаков и вырабатывается сигнал рассогласования.
Передаточная функция элемента сравнения будет
3. У.У. Усилитель предназначен для усиления слабого сигнала Dy в мощный сигнал s, который управляет работой исполнительного механизма, поэтому будем считать его пропорциональным элементом. Тогда уравнение У.У. будет
где kУУ – коэффициент усиления управляющего устройства (У.У.). Передаточная функция усилителя
4. И.М. Исполнительный механизм перемещает регулирующий орган (Р.О.). Чаще всего перемещение происходит с постоянной скоростью, так как он снабжен электродвигателем, имеющим постоянную скорость. Тогда И.М. можно отнести к идеальному интегрирующему элементу. Уравнение ИМ
а передаточная функция
Передаточная функция регулятора
Из последнего соотношения получаем уравнение регулятора в операторном виде
из которого дифференциальное уравнение регулятора будет
Решение этого уравнения дает закон регулирования
Из этого уравнения следует, что перемещение регулирующего органа mрег пропорционально интегралу от измеряемой величины по времени t (И-закон). В литературе по автоматике этот закон описывают в виде
где Ти - время интегрирования; kр – коэффициент усиления регулятора. Разгонная характеристика регулятора
При j=const имеем
Регулирующий орган перемещается с постоянной скоростью, (µрег - линейная функция времени), что и показывает разгонная характеристика. При Ти®¥ регулирующий орган будет перемещаться с большой скоростью и быстро достигать своих крайних положений («открыт» или «закрыт»). В процессе регулирования регулирующий орган будет все основное время находиться в крайних положениях, то есть имеем позиционное регулирование (Пз- закон) как частный случай интегрального закона. Достоинства И закона: точное регулирование в статических режимах (без статической ошибки). Недостатки: плохие динамические свойства: большое динамическое отклонение А1 и время регулирования tр. Это связано с тем, что регулирующий орган непрерывно перемещается, пока не входит в пределы зоны нечувствительности регулятора. Достоинства и недостатки можно увидеть на графике процесса регулирования, под которым понимается изменение регулируемого параметра j во времени при нанесении на объект возмущения.
Для улучшения динамических свойств регулятора необходимо регулирующий орган периодически останавливать в промежуточном положении, не давая ему непрерывно перемещаться. С этой целью вводятся обратные связи по положению регулирующего органа, которые изменяют закон регулирования. П - закон регулирования Этот закон получается введением в регулятор жесткой отрицательной обратной связи по положению регулирующего органа. Жесткая связь означает, что в обратную связь включен пропорциональный элемент. Структурная схема регулятора с обратной связью имеет вид (рис. 49):
Будем считать, что основные элементы регулятора те же, что и при рассмотрении И – закона, то есть известны их передаточные функции. Уравнение жесткой обратной связи будет
Ее передаточная функция будет
Передаточная функция регулятора получается произведением передаточной функции сложного соединения, выделенного на схеме и обозначенной I и передаточной функции И.У.
Передаточная функция WI определится как
Тогда
Из последнего соотношения получаем уравнение регулятора
Это уравнение инерционного объекта первого порядка. При упрощении (ТИ.М.=0) получим упрощенное уравнение регулятора
из которого видно, что mрег пропорционально изменению регулируемого параметра (П-закон). В литературе по автоматике этот закон обычно записывается в виде
где Достоинства П-закона – в хороших динамических свойствах регулятора. Регулирующий орган останавливается в промежуточном положении из-за воздействия обратной связи, величина которой растет по мере перемещения регулирующего органа (mрег).
Недостаток – в статических режимах работы системы появляется ошибка регулирования (статическая ошибка регулирования), поскольку обратная связь при отключении регулятора не снимается. x = y – y0 при Dy=0 – регулятор отключился, не работает. Разгонная характеристика П-регулятора (рис. 54)
Характеристика, построенная при ТИ.М.=0, соответствует последнему уравнению П-регулятора. При ТИ.М.¹ 0 регулирующий орган будет перемещаться по кривой (экспонента), которую можно получить, решив дифференциальное уравнение первого порядка (9.7). Достоинства и недостатки регулятора можно увидеть на графике процесса регулирования (рис. 55):
При использовании этого закона динамическое отклонение А1 и время регулирования tр меньше, чем у И-закона, поэтому П-закон используется при допустимых статических ошибках регулирования Djст. ПИ-закон регулирования Этот закон получается введением гибкой отрицательной обратной связи по положении регулирующего органа. Гибка связь означает, что в обратную связь включен реальный дифференцирующий элемент, входной сигнал которого максимален в начальный момент времени и исчезает с течением времени. Следовательно, в начальные моменты времени регулятор работает по П-закону, а в конце, когда обратная связь снимается, он работает по И-закону. Структурная схема ПИ-регулятора такая же, как у П-регулятора, только обратная связь другая – гибкая. При тех же самых основных элементах регулятора: ИУ, ЭС, УУ, ИМ, остается учесть передаточную функцию обратной связи. Уравнение гибкой обратной связи имеет вид:
Отсюда передаточная функция обратной вязи
Получим передаточную функцию регулятора, действуя так же, как и при получении таковой в П-законе.
Из последнего соотношения следует уравнение регулятора в операторной форме
Отсюда уравнение регулятора
Упростим это уравнение, приняв ТИ.М.®0. Получим
Его решение методом разделения переменных дает
Из этого уравнения видно, что перемещение регулирующего органа (mрег) пропорционально регулируемому параметру j и интегралу от него по времени (ПИ-закон). В литературе это уравнение записывается в виде
где kр и Ти – параметры настройки ПИ-регулятора (коэффициент усиления и время интегрирования). Разгонная характеристика ПИ-регулятора имеет вид (рис. 56)
Характеристика, построенная при ТИ.М.=0, соответствует последнему полученному уравнению. Если ТИ.М.¹ 0, то регулирующий орган будет перемещаться по кривой, которую можно получить из решения дифференциального уравнения второго порядка (9.9). Такое перемещение регулирующего органа существенно улучшает процесс регулирования по сравнению с И-законом. Это можно увидеть по графику процесса регулирования (рис. 57).
Из графика видно, что динамическое отклонение параметра А1 меньше, чем у И-закона и время регулирования tр – меньше. К тому же, в статических режимах нет ошибки регулирования, так как среднее значение параметра j в пределах зоны нечувствительности регулятора Dнеч равно заданному значению j0.
В связи с этими достоинствами ПИ-закон является наиболее употребительным законом при регулировании технологических процессов.
ПД-закон регулирования Он получается введение дополнительного импульса по скорости изменения параметра Получив передаточную функцию регулятора, а из нее дифференциальное уравнение, при упрощении ТИ.М.=0 получим уравнение закона, которое в литературе приводится к виду
Из него видно, что регулирующий орган перемещается (mрег) пропорционально изменению регулируемого параметра j и пропорционально скорости изменения параметра (ПД-закон регулирования). Разгонная характеристика ПД-регулятора представлена на рис. 60. Из характеристики следует, что при ТИ.М.=0 и идеальном дифференециаторе (Дф) в момент нанесения возмущения по j регулирующий орган должен мгновенно переместиться в крайнее положение и тут же вернуться к значению mрег=kрj. Если дифференциатор Дф – реальный, то при ТИ.М.=0 регулирующий орган переместится до конечного значения, а потом по экспоненте до значения mрег=kрj. При ТИ.М.¹ 0 и реальном дифференциаторе регулирующий орган будет пермещаться по сложной кривой (показана на графике штриховыми линиями). Такое сложное перемещение регулирующего органа улучшает процесс регулирования по сравнению с П-законом. Это можно увидеть на графике процесса регулирования (рис. 61).
Из графика видно, что в ПД-законе динамическое отклонение А1 и время регулирования tр будут меньше по сравнению с П-законом.
ПИД-закон регулирования ПИД-закон регулирования получается введением дополнительного импульса по скорости изменения параметра в ПИ-закон. Аналогично, как и в предыдущем случае, можно получить передаточную функцию регулятора, дифференциальное уравнение регулятора и при упрощении ТИ.М.=0 получить уравнение идеального закона, которое в литературе записывается в виде
Перемещение регулирующего органа (mрег) пропорционально изменению параметра j, его интегралу по времени и его производной (ПИД-закон). Разгонная характеристика ПИД- регулятора показана на рис. 62.
Из характеристики следует, что при ТИ.М.=0 и идеальном дифференциаторе Дф регулирующий орган мгновенно дойдет до крайнего положения, потом так же быстро вернется к значению mрег=kрj, а далее будет перемещаться по линейному закону, как у И-закона. Если дифференциатор Дф реальный, то перемещение mрег будет конечным и далее он ассимптотически будет приближаться к линейной форме перемещения. При ТИ.М.¹ 0 и реальном дифференциаторе регулирующий орган будет перемещаться по сложной кривой (показано шриховой линией). Такое сложное перемещение регулирующего органа улучшает качество регулирования по сравнению с ПИ-законом, что видно из графиков процессов регулирования (рис. 63).
В ПИД-законе динамическое отклонение А1 и время регулирования tр будет меньше, чем в ПИ-законе. ПИД-закон является одним из основных законов регулирования. Он является общим для всех законов. Другие законы можно получать из него. Многоимпульсные регуляторы В тех случаях, когда используемые законы не дают желаемого качества процессов регулирования, переходят к многоимпульсному регулированию (комбинированный принцип). Отметим два типа многоимпульсного регулирования: 1 – регулирование по возмущению; 2 – каскадное регулирование. Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 786; Нарушение авторского права страницы
 ;
;  ;
; 
 (7.7)
(7.7) . (7.8)
. (7.8)
 ; (7.9)
; (7.9) Разгонная характеристика получается из решения дифференциального уравнения элемента
Разгонная характеристика получается из решения дифференциального уравнения элемента . (7.10)
. (7.10) ,
,  . (7.11)
. (7.11)
 ;
;  .
.
 ; (7.12)
; (7.12) . (7.13)
. (7.13)

 . (7.14)
. (7.14) .
. . (7.15)
. (7.15) , где р1, 2 – действительный числа при соотношении Т1> 2Т2. Это условие соотношения коэффициентов, при котором корни уравнения (6.38) являются действительными числами..
, где р1, 2 – действительный числа при соотношении Т1> 2Т2. Это условие соотношения коэффициентов, при котором корни уравнения (6.38) являются действительными числами..
 . (7.16)
. (7.16) ; (7.17)
; (7.17) и Т1 с Т3 и Т4 получается раскрытием скобок в знаменателе передаточной функции
и Т1 с Т3 и Т4 получается раскрытием скобок в знаменателе передаточной функции  ;
;  .
. . (7.18)
. (7.18)
 ;
; 
 .
. , (7.19)
, (7.19) . (7.20)
. (7.20) ;
;  ;
;  ; (7.21)
; (7.21) ;
;  ;
;  . (7.22)
. (7.22) . (7.23)
. (7.23)
 . (7.24)
. (7.24) . (7.25)
. (7.25) , то есть хвых будет линейно изменяться с течением времени.
, то есть хвых будет линейно изменяться с течением времени. ; (7.26)
; (7.26) ;
;  ;
;  .
. ;
;  . (7.27)
. (7.27)
 . (7.28)
. (7.28)
 (7.29)
(7.29) и коэффициентом усиления 1.
и коэффициентом усиления 1. (7.30)
(7.30)
 , (7.31)
, (7.31)
 . (7.32)
. (7.32) ;
;  ;
;  ;
;  .
. . (7.34)
. (7.34) . Отсюда разгонная характеристика элемента
. Отсюда разгонная характеристика элемента
 . (7.35)
. (7.35) ;
;  ;
;  ; (7.36)
; (7.36) ;
;  ;
;  (7.37)
(7.37)


 .
. . (7.38)
. (7.38) ;
;  . (7.39)
. (7.39)
 . (7.40)
. (7.40) ;
;  . (7.41)
. (7.41) . (8.16)
. (8.16) . (8.17)
. (8.17)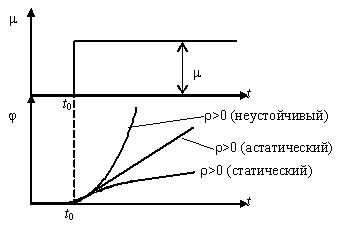

 , где kИУ – коэффициент усиления измерительного устройства. Передаточная функция:
, где kИУ – коэффициент усиления измерительного устройства. Передаточная функция:  .
. .
. .
. ,
,  .
. ,
,  .
. .
. , (9.1)
, (9.1) . (9.2)
. (9.2) . (9.3)
. (9.3) ,
, 
 . (9.5)
. (9.5)
 .
.
 .
. .
. .
. . (9.6)
. (9.6) , (9.7)
, (9.7) , (9.8)
, (9.8) - коэффициент усиления регулятора.
- коэффициент усиления регулятора. ; Dy = 0 при y = y0 + x.
; Dy = 0 при y = y0 + x.
 .
. .
. .
.

 .
. (9.9)
(9.9) (9.10)
(9.10) . (9.11)
. (9.11) (9.12)
(9.12)
 в П-закон регулирования.
в П-закон регулирования. . (9.13)
. (9.13)
 . (9.14)
. (9.14)