
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Частные случаи аналитических условий равновесия
Выберем оси координат так, чтобы оси
1. 2. 3. Для того, чтобы тело под действием плоской системы произвольно расположенных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись три уравнения статики: два уравнения проекций на оси, лежащие в плоскости сил и дно уравнение моментов относительно оси, перпендикулярной плоскости сил. 1. Плоская система параллельных сил.
1. 2. Для того, чтобы тело под действием плоской системы параллельных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись два уравнения равновесия: уравнение проекций на ось, параллельную силам и уравнение моментов относительно оси, перпендикулярной плоскости сил. 3. Пространственная система параллельных сил.
1. 2. 3. Для того, чтобы тело под действием пространственной системы параллельных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись три уравнения статики: уравнение проекций на ось, параллельную силам и два уравнения моментов относительно осей, перпендикулярных силам. 4. Система сходящихся сил.
Выберем начало координат в точке схода (рис. 32) Так как моменты сил относительно осей координат равны нулю, то уравнения 4, 5, 6 выполняются тождественно. А уравнениями равновесия остаются первые три (они уже были получены ранее).
1.
Линии действия всех сил пересекаются в точке 1. 2.. ОБЩИЙ ПРИЗНАК ЭКВИВАЛЕНТНОСТИ ДВУХ СИСТЕМ СИЛ (КРИТЕРИЙ ЭКВИВАЛЕНТНОСТИ) Теорема. Для того, чтобы две системы сил были эквивалентны, необходимо и достаточно, чтобы у этих систем были геометрически равны соответственно главные векторы и главные моменты относительно одного и того же полюса. Доказательство. Необходимость. Дано: Следует доказать, что у этих систем сил равны главные векторы и главные моменты относительно одного и того же полюса, то есть что
Доказательство: Системы сил Достаточность. Дано: две системы сил Доказать, что системы
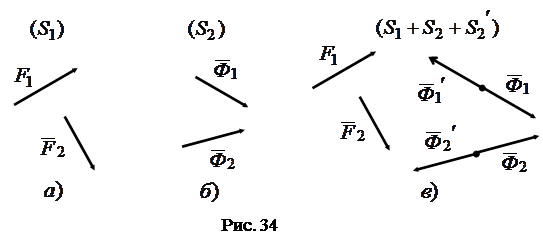
Доказательство: Не ограничиваясь в общности, проводим доказательство в предположении, что каждая из систем  и и  состоит из двух сил, то есть пусть даны системы сил состоит из двух сил, то есть пусть даны системы сил  и и  (рис 34а). В силу основной леммы статики системы сил и , содержащие произвольное число сил всегда при помощи элементарных операций могут быть приведены к двум силам, при этом главные векторы и главные моменты этих систем сил не изменяются. (рис 34а). В силу основной леммы статики системы сил и , содержащие произвольное число сил всегда при помощи элементарных операций могут быть приведены к двум силам, при этом главные векторы и главные моменты этих систем сил не изменяются.
Рассмотрим дополнительную систему
Тогда Системы сил
так как система Рассмотрим систему Главный вектор: Главный момент:
Согласно основной лемме статики систему сил
то есть
или Теорема доказана.
ТЕОРИЯ ПАР СИЛ Момент пары сил
Плоскость, в которой лежит пара сил, называется плоскостью пары. Как уже отмечалось, главный момент пары не зависит выбора полюса и отличен от нуля.
Главный момент пары, не зависящий от выбора полюса, называется моментом пары. Обозначение: Момент пары – это свободный вектор, перпендикулярный плоскости пары, направленный в ту сторону, откуда видно, что пара стремится вращать тело против часовой стрелки, и равный по величине произведению одной из сил пары на кратчайшее расстояние между линиями действия сил пары (плечо пары).
Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 592; Нарушение авторского права страницы
 1. Плоская система произвольно расположенных сил (все силы лежат в одной плоскости).
1. Плоская система произвольно расположенных сил (все силы лежат в одной плоскости). и
и  лежали в плоскости сил (рис. 29). В этом случае из шести уравнений статики 3-е, 4-е, 5-е удовлетворяются тождественно. Уравнениями равновесия являются три:
лежали в плоскости сил (рис. 29). В этом случае из шести уравнений статики 3-е, 4-е, 5-е удовлетворяются тождественно. Уравнениями равновесия являются три:  ,
,  ,
,  .
. Оси координат выбираем так, чтобы оси
Оси координат выбираем так, чтобы оси  Выберем оси координат так, чтобы ось
Выберем оси координат так, чтобы ось  была параллельна силам. В этом случае из шести уравнений статики 1-е, 2-е, 6-е удовлетворяются тождественно, а уравнениями равновесия остаются следующие три:
была параллельна силам. В этом случае из шести уравнений статики 1-е, 2-е, 6-е удовлетворяются тождественно, а уравнениями равновесия остаются следующие три:  ,
,  ,
,  .
.
 4. Плоская система сходящихся сил.
4. Плоская система сходящихся сил. , и все силы лежат в плоскости
, и все силы лежат в плоскости  (рис. 33). Уравнениями равновесия такой системы являются:
(рис. 33). Уравнениями равновесия такой системы являются:  .
. ,
,  .
.
 , силы которой пряморотивоположны силам системы
, силы которой пряморотивоположны силам системы  ,
,  .
. ,
,  .
. (рис. 34в) эквивалентны:
(рис. 34в) эквивалентны:  ,
,  и
и  .
. , состоящую из сил
, состоящую из сил  .
. .
. .
. . Тогда
. Тогда  . У эквивалентных систем сил равны главные моменты и главные вектор: поэтому
. У эквивалентных систем сил равны главные моменты и главные вектор: поэтому ,
,  ,
,  – прямопротивоположные силы, которые можно отбросить. Таким образом:
– прямопротивоположные силы, которые можно отбросить. Таким образом:  ,
,  .
. Рассмотрим пару сил
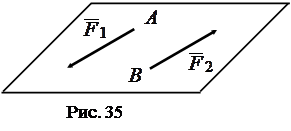
Рассмотрим пару сил  . По определению – это совокупность двух равных по величине и параллельных сил, направленных в противоположные стороны (рис. 35).
. По определению – это совокупность двух равных по величине и параллельных сил, направленных в противоположные стороны (рис. 35). , или
, или  .
. Для доказательства этого утверждения рассмотрим пару
Для доказательства этого утверждения рассмотрим пару 
