|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Результаты численных исследований на модели системы автоматического управления в среде Simulink ⇐ ПредыдущаяСтр 4 из 4
На первом этапе исследования получены логарифмическая амплитудная, логарифмическая фазовая частотные характеристики (рис. 3.6)и переходный процесс (рис. 3.7) нескорректированной системы. Из проведенного моделирования можно заключить, что пространственная металлоконструкция антенной установки РТ-70 характеризуется слабо демпфированными собственными колебаниями: на первой резонансной частоте наблюдается всплеск амплитуды около 20 дБ, который в 10 раз превышает амплитуду возбуждающего воздействия, время затухания tз≈ 10 с.
Рисунок 3.6 – Логарифмическая амплитудная характеристика и логарифмическая фазовая характеристика. Платформа. Угол азимута
Рисунок 3.7 –Переходный процесс по скорости нескорректированной системы. Относительно платформы РТ-70. Угол азимута
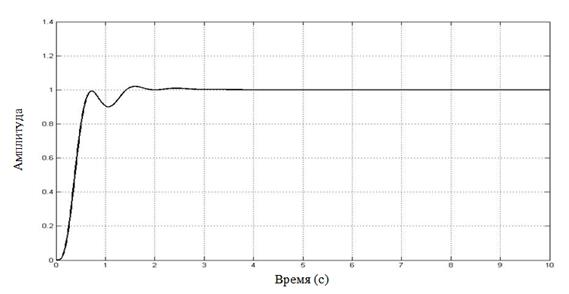
На втором этапе исследования была рассмотрена уже скорректированная система. В результате синтеза системы управления электроприводом наведения радиотелескопа при заданной максимальной скорости слежения, равной 4 угл. мин/с, и максимальном ускорении слежения, равным 0.005 град/с2, и точности –25 угл. с, была произведена оптимизационная процедура, определены коэффициенты ПИД-регулятора – Kp, Ki, Kd (рис. 3.8), получен оптимальный переходный процесс (рис. 3.9) в результате его поиска после оптимизационной процедуры с учетом ограничений (рис. 3.10). На рисунке 3.11 представлена логарифмическая амплитудная частотная характеристика и логарифмическая фазовая частотная характеристика. Как ранее отмечалось, процесс согласования с разных углов дает возможность оценить итоговое качество спроектированной системы после ее синтеза: на рисунке 3.12 отображен процесс согласования с малого угла. Произведенные численные исследования (рис. 3.13-3.25) на модели в среде Simulink позволили показать поведение системы автоматического управления при отработке управляющего и возмущающего воздействий. Режим слежения за эквивалентным синусом представлен на рисунке 3.23.
Рисунок 3.8 – Оптимизация параметров ПИД-регулятора
Рисунок 3.9 – Оптимальный переходный процесс
Рисунок 3.10 – Поиск оптимального переходного процесса после оптимизационной процедуры
Качество работы цифровой системы управления оценивалось при отработке управляющего(ступенчатого и гармонического) и возмущающего воздействий. При проведении численных исследований система управления электроприводом радиотелескопа рассматривалась с наблюдателем неизмеряемых координат – системой, которая воспроизводит всю зеркальную систему радиотелескопа. Такой подход позволяет получить оценки неизмеряемых координат и скручивания в том случае, когда система замкнута не по датчикам обратной связи на исполнительной оси, а по радиооси, где входом наблюдателя являются данные с датчика угловой скорости. Максимальная ошибка отработки эквивалентного гармонического воздействия составляет 21 угл.с, ошибка отработки ветрового воздействия при постоянной скорости ветра 10 м/с не превышает 15 угл.с. Суммарная ошибка управления при одновременной отработке эквивалентного гармонического воздействия и ветрового возмущения составляет 25 угл.с. Перерегулирование по скорости не более 20%, длительность переходного процесса не более 2с. Полученный в результате синтеза запас по амплитуде составляет 15 дБ, а запас по фазе – 30 градусов.Перечисленные параметры соответствуют техническому заданию на проектирование антенной установкиРТ-70. Дальнейшее повышение точности наведения при использовании алгоритма управления по состоянию наталкивается на трудности, связанные с его цифровой реализацией. Возможности и качественные особенности цифровой реализации управления определяются следующими основными факторами: – нелинейным характером динамических процессов; – полосой частот, в которой осуществляется управление объектом; – динамическими характеристиками наблюдаемого устройства; – размерностью систем дифференциальных уравнений регулятора; – производительностью и разрядностью управляющей цифровой вычислительной машины. На качество управления по состоянию существенно влияют динамические характеристики наблюдаемого устройства: чем меньше постоянная времени наблюдаемого устройства, т. е. чем выше скорость восстановления неизмеряемых координат и воздействий, тем выше коэффициенты передачи по контуру, значения которых могут достигать нескольких тысяч и десятков тысяч. Практическая реализация таких коэффициентов как аналоговыми, так и цифровыми средствами затруднительна. Поэтому в каждом конкретном случае ищется компромисс между допустимой точностью управления и выбором динамики системы управления. Размерность систем дифференциальных уравнений, описывающих динамику регулятора зависит от свойств конкретного объекта управления, характеристик внешних воздействий, измерительной системы и требований обеспечения точности управления динамическим объектом. Поэтому и объем вычислительных процедур при решении систем дифференциальных уравнений, описывающих динамику регулятора, возрастает при увеличении числа не измеряемых координат. ЗАКЛЮЧЕНИЕ В работе рассмотрена актуальная задача синтеза системы управления электроприводом наведения и было показано, что для качественного наведения радиотелескопа в нужную точку на небосклоне, необходимо выполнить довольно значительный объем мероприятий и, в частности, решить вопрос, связанный с нахождением оптимальных сочетаний всех параметров и особенностей системы управления радиотелескопа. В предложенной работе осуществлена именно эта задача. Для этого на первом этапе работы был проведен анализ радиотелескопа РТ-70, как объекта управления для получения упрощенной математической модели малой размерности, позволяющей провести желаемую оценку качества управления.Далее в работе была рассмотрена возможность повышения точности наведения радиотелескопа путем синтеза такой структуры системы управления, которая бы позволила уменьшить насколько это возможно суммарную ошибку управления при одновременной отработке эквивалентного гармонического воздействия и ветрового возмущения. Учитывались и другие важнейшие особенности объекта: нелинейный характер процессов в системе и слабо демпфированное колебательное звено механической части антенной установки. Для решения этой задачи были разработана конструкция механического узла радиотелескопа; математические модели электропривода, редуктора и пространственной металлоконструкции радиотелескопа. Эти модели позволяют путем изменения параметров и отдельных элементов структуры имитировать ситуации для оценок точности наведения антенн следящей системы. Проведено исследование в среде MatLab математической модели электропривода наведения радиотелескопа с применением разработанной методики и подготовленной программы автоматизированного синтеза. СПИСОКЛИТЕРАТУРЫ 1. Радиотелескоп РТ-70 международной радиоастрономической обсерватории «Суффа»: сайт астрокосмического центра Учреждения Российской академии наук Физического института им. П.Н.Лебедева РАН (АКЦ ФИАН). — 2013 [Электронный ресурс]. — URL: http: //asc-lebedev.ru/? dep=16 (дата обращения: 01.04.2014). 2. Дубаренко В. В. Нелинейная динамика сложных электромеханических систем как объектов управления: дис. д.т.н. – Санкт-Петербург, 2010. 3. Белянский П. В., Сергеев В. Г. Управление наземными антеннами и радиотелескопами. М.: Сов. Радио, 1980. 280 c. 4. Галимов Г.К. Антенны радиотелескопов, систем космической связи и РЛС. Т.4 – М.: Антенны-связь НПК, 2013. 392 с. 5. Стейнберг Ж., Леку Ж. Радиоастрономия. Радиоастрономические методы на службе радиофизики. Пер. с французск. П.В. Щеглова. М. Изд. иностр. лит. 1963. 312 с. 6. Христиансен У., Хёгбом И. Радиотелескопы: Пер. с англ. 2-е изд., перераб. и доп. – М.: Мир, 1988. 304 с. 7. Парщиков А. А., Емельянов И. А. Система синхронно-следящего привода радиотелескопа РТ-7.5 МВТУ. М.: Наука, 1974. -192 с. 8. Разработка проекта модернизации приводов антенных систем радиотелескопа РТ 7.5 для создания на его основе наземного радиолокатора наведения и подсветки ка-диапазона. Отчёт об опытно конструкторской работе МГТУ им. Н. Э. Баумана. Руководитель В. А. Польский. Исп. Jle Ван Тхань и др. № 1.27.04, 2004, Г.Р. № 01400602738, инв. № 02700600650. - Москва, 2004. - С. 44-87. 9. Вайнберг С. Космология. Пер. с англ. – М.: Книжный дом «Либроком», 2013. 608 с. 10. Кисляков А.Г. Радиоастрономические исследования в миллиметровом и субмиллиметровом диапазонах волн. Успехи физических наук. Т.101, выпуск 4. 1970. С. 621-623. 11. Кучмин А.Ю.Система наведения радиотелескопа РТ-70 на космические источники радиоизлучения в миллиметровом диапазоне волн / Сборник трудов четвертой международной школы-семинара БИКАМП ’03. 2003. с. 384-385. 12. Конникова В.К., Лехт Е.Е., Силантьев Н.А. Практическая радиоастрономия: Учебное пособие. М.: Издательство Московского университета, 2011. 304 c. 13. Исследование эффективности наведения радиотелескопа РТ-70 на космические источники радиоизлучения в миллиметровом диапазоне после модернизации конструкции зеркальной системы и системы управления./ Шифр “Суффа-4”, этап №1, итоговый отчет. 14. Кучмин А.Ю. Механическая модель радиотелескопа РТ-70 / Тез.докл. 6 Студенческая конференция. ГУАП 2003. 15. Разработка алгоритмов построения системы высокоточного наведения радиотелескопа РТ-70 в миллиметровом диапазоне радиоволн./ Шифр “Суффа-2”, этап №1, промежуточный отчет. 16. Дубаренко В.В., Степанов Д.Г. Синтез оптимальной системы управления радиотелескопа // Вопросы специальной радиоэлектроники. Ростов на/Д, 1968. Серия XVI, вып. 2. 17. Кучмин А.Ю. Управление зеркальной системой радиотелескопа миллиметрового диапазона: дис. к.т.н. – Санкт-Петербург, 2007. 18. Соколовский С. Оценка возможности применения электроприводов переменного тока для систем наведения радиотелескопа РТ-70. – Санкт-Петербург, 2007. 19. SewEurodrive. Приводной преобразователь MOVIDRIVE®MD_60A. Системноеруководство. Издание 11/99. 20. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972 - 768 с. 21. Яворский Б.М., Детлаф А.А. Справочник по физике. – М.: Физмат, 1963. – 847 с. 22. Дьяконов В. MATLAB: учебный курс. – СПб: Питер, 2001. – 560 с. 23. Кучмин А.Ю.Электродинамическая модель радиотелескопа РТ-70 / Тез.докл. 6. Студенческая конференция. ГУАП 2003. Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 885; Нарушение авторского права страницы