
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Дисперсия допустимой линейной комбинации
Хотя обыкновенные оценки являются линейными комбинациями данных (т.е. взвешенные средние), мы должны уметь вычислять их дисперсии. Во-первых, мы предполагаем стационарную переменную Z(x) с ковариационной функцией C(h). Пусть линейной комбинацией будет Z*
где li – веса и xi – местоположения проб. По определению, их дисперсия –
Не трудно показать, что если m – среднее Z(x), то
В результате
Эта величина не должна быть отрицательной независимо от точек и весов. Для удовлетворения условию функция C(h) должна быть положительно определена. Ситуация немного отличается, когда переменные внутренние, но нестационарные. В этом случае дисперсия произвольной линейной комбинации может не существовать. Мы можем быть уверены только в том, что она существует для линейной комбинации приращений. Комбинации являются “допустимыми”, если сумма весов равна нулю.
Ясно, что любая линейная комбинация приращений удовлетворяет этому условию, поскольку любое одиночное приращение включает веса +1 и –1. И наоборот, любая комбинация, удовлетворяющая этому условию, может быть записана в виде линейной комбинации приращений. Рамка № 3 предъявляет доказательство и формулу для дисперсии в понятиях весов и моделей вариограмм. Так как ковариация может не существовать для внутренних случайных функций, то формула должна быть записана через выражение вариограммы.
[3.14]
Так как эта дисперсия должна быть неотрицательной, то модели вариограмм должны удовлетворять определенным условиям. Для любых точек x1, x2, … xk, и любых весов l1, l2, … lk, таких что Рамка № 3: Вычисление дисперсии допустимых линейный комбинаций.
Во-первых, мы хотим показать, что любая линейная комбинация, сумма весов которой равна 0, может быть выражена как комбинация приращений. Выбрав произвольную точку, как начальную, мы имеем:
Поэтому дисперсия существует и имеет вид:
Для вычисления ковариации приращений мы используем тождество:
[3.17] Отсюда
Подставляя это в формулу [3.16], получаем:
Первые два слагаемых исчезают, т.к.
Отсюда, очень важный результат – дисперсия любой линейной комбинации, сумма весов которых равна 0, существует и может быть вычислена заменой ковариаций в Уравнении [3.12] на -g.
Поэтому -g называется условно положительно определенной. Это условие слабее, чем предшествующее для ковариационной функции, которое должно быть действительным для всех возможных весов, поэтому последнее утверждение справедливо только для весов, сумма которых равна 0. Следовательно, класс допустимых моделей вариограмм богаче, чем для ковариационных функций. Он включает пороговые вариограммы, ассоциирующиеся с ковариациями, а также – беспороговые, которые не имеют аналогов ковариационных функций. Поэтому здесь налицо компромисс между двумя гипотезами. Внутренняя гипотеза позволяет нам использовать широкий ранг вариограмм, но сумма весов должна стремиться к 0. Зона влияния допустимых моделей вариограмм более ограниченна для стационарных гипотез, но любой весовой фактор может быть при этом использован. Допустимые модели
Если мы хотим гарантировать, чтобы дисперсия любой линейной комбинации никогда не стала отрицательной, мы можем использовать в качестве моделей для вариограмм или ковариаций только определенные функции. Ковариации должны быть положительно определенными функциями; вариограммы должны быть условно отрицательно определенными. Так как нелегко найти функции, которые обладают этим свойством или произвести соответствующую проверку функций, то лучше выбрать модель вариограммы из списка подходящих функций, чем создавать новую функцию. Перечень общих моделей дан в следующем разделе. Они могут быть добавлены для получения других допустимых моделей, потому что это будет эквивалентно сложению независимых случайных функций, но вычитание невозможно. Нельзя также объединять их частями. Здесь мы имеем в виду, что вы не можете выбрать одну модель для одного интервала, и затем - другую – для следующего, как показано на Рис. 3.8.
Рис 3.8. Пример функции, которую нельзя использовать в качестве модели вариограммы
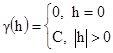
Чтобы надлежащим образом установить, является или не является функция положительно определенной, необходимо выполнить преобразование Фурье. Это не всегда просто даже для одномерного случая, но становится намного труднее в пространстве с более высоким измерением. Для большей информации о способах проверки функций на положительную определенность, смотрите Армстронг и Даймонд (Armstrong and Diamond) (1984). Сделать это действительно сложно, но возможно для функций, которые положительно определенны в одномерном пространстве. Например, кусочно определенная линейная функция, изображенная на Рис. 3.9., является допустимой вариограммной моделью в одномерном случае, но не в двух или трехмерном. Упражнение 3.11 показывает, как строить такие модели в одномерном пространстве, а упражнение 3.10 приводит пример для двухмерного пространства с отрицательной дисперсией.
Рис 3.9. Кусочно определенная линейная модель, которая допустима в одномерном пространстве и не допустима в двухмерном или в пространстве большей размерности
После предупреждения об опасности попыток создания своей собственной модели вариограммы, читатель может быть удивлен, узнав, как появились используемые сейчас модели вариограмм. Они были получены математическим моделированием случайной функции и теоретическим вычислением ее вариограммы. Полученная модель должна быть по построению положительно определенной или, по крайней мере, условно отрицательно определенной в пространстве, в котором она была построена. Несколько упражнений в конце главы иллюстрируют эту процедуру. Например, упражнение 3.13 описывает метод построения сферических шаров, включающих случайное количество точек Пуассона, приводящих к так называемой сферической модели вариограммы.
Основные модели вариограмм
Нижеперечисленные модели вариограмм являются допустимыми с учетом описанных выше условий. Модели с порогом соответствуют стационарным пространственным переменным, в то время как беспороговые модели ассоциируются только с внутренними переменными. Этот список не является исчерпывающим.
Эффект самородка
Это модель соответствует чисто случайному явлению (белый шум) между некоррелированными значениями, независимо от расстояния между ними.
3.12.2Сферическая модель
Сферическая модель, возможно, наиболее часто используемая модель. Она имеет очень простой вид, и ее форма соответствует часто встречаемым в природе явлениям: функция почти линейно возрастает до определенного расстояния и затем стабилизируется. Касательная, проведенная к началу функции, пересекает порог в точке с абсциссой
Экспоненциальная модель
Практическая зона влияния этой модели – 3a. На этом расстоянии достигается 95% ее порога. Касательная к началу функции пересекает порог в точке с абсциссой a. Так же как сферическая функция, экспоненциальная модель линейна на малых расстояниях, что помогает их сравнивать. На рисунке 3.10 изображены обе модели с одинаковым порогом и0 с практической зоной экспоненциальной модели эквивалентной реальной зоне сферической. Разница довольно очевидна. Экспоненциальная модель возрастает круче в начале, но имеет только тенденцию приближаться к своему порогу скорее, чем достигает его в действительности.
Рис 3.10. ( a ) Сферическая модель вариограммы с порогом – 1.0 и зоной – 1.0 и ( b ) экспоненциальная модель с потолком 1.0 и масштабным коэффициентом – 0.33 (т.е. ее практическая зона равна 1.0)
Степенные модели
Линейная модель,
Рис 3.11. ( a ) Модель вариограммы Гаусса и ( b ) три модели степенных функций со степенями a=0.5, 1.0 и 1.7
Модель Гаусса
Практическая зона влияния – 1.73a. Модель Гаусса представляет предел непрерывности явления. Опыт показывает, что здесь часто встречается числовая нестабильность в случае, когда эффект самородка отсутствует.
Кубическая модель
Эта модель характеризуется параболическим поведением в начале и, в общем, близка к модели Гаусса, исключая то, что она не является бесконечно дифференцируемой. Ее уравнение –
где r=h/a.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 943; Нарушение авторского права страницы
 , [3.10]
, [3.10] [3.11]
[3.11] . Следовательно
. Следовательно
 [3.12]
[3.12] [3.13]
[3.13]
 , мы требуем чтобы
, мы требуем чтобы [3.15]
[3.15] [3.16]
[3.16]
 [3.18]
[3.18]
 , убираем:
, убираем:  [3.19]
[3.19] [3.20]
[3.20]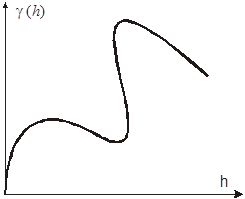

 [3.21]
[3.21] [3.22]
[3.22] . Это очень удобно при подгонке параметров модели.
. Это очень удобно при подгонке параметров модели. [3.23]
[3.23]
 [3.24]
[3.24] , является частным случаем.
, является частным случаем.
 [3.25]
[3.25] [3.26]
[3.26]