
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ линейной системы автоматического регулированияСтр 1 из 4Следующая ⇒
Введение Темой работы является анализ и синтез замкнутой линейной системы автоматического регулирования САР. Выполнение курсовой работы способствует более глубокому пониманию курса и получению практических навыков расчета и проектирования систем автоматического регулирования. При выполнении курсового проекта решаются вопросы, охватывающие почти все разделы теории стационарных непрерывных линейных систем автоматического регулирования. Большое внимание уделено преобразованию структурных схем и составлению передаточных функций системы, различным способам исследования устойчивости, построению переходного процесса, оценке качества систем в установившемся и переходном режимах, а также синтезу корректирующего устройства, обеспечивающего заданные показатели качества регулирования. Решение отдельных задач курсового проекта требует применения справочного материала (номограмм, диаграмм, таблиц и пр.), основная часть которого приводится в методических указаниях. Приведенные методы расчета позволяют решать задачи с использованием электронной вычислительной техники на основе стандартных программ современных ЭВМ.
Исследование системы на устойчивость по критерию Гурвица Получим характеристическое уравнение замкнутой АСР, путем выделения знаменателя ее передаточной функции и приравнивая его к нулю. Передаточная функция замкнутой системы
Тогда характеристическое уравнение будет иметь вид
Найдем главный и определитель Гурвица и определители низших порядков
Подставив численные значения, получим
Для устойчивости системы необходимо и достаточно, чтобы определитель Гурвица и все его диагональные миноры при а0> 0 были положительны, т.е. Δ 1> 0, Δ 2> 0, Δ 3> 0, …, Δ n> 0. Условие Гурвица не выполняется для данной системы Δ 2< 0, Δ 3< 0, следовательно, делаем вывод, что система не устойчива. Найдем критический коэффициент усиления
подставляя численные значения, получим
Итак Исследование системы на устойчивость по критерию Михайлова Для оценки устойчивости по критерию Михайлова необходимо построить кривую, которую описывает конец вектора Вектор
Данное выражение представим в виде
где
Подставляя численные значения, получим
Задавая значения Таблица 1 – Координаты годографа Михайлова
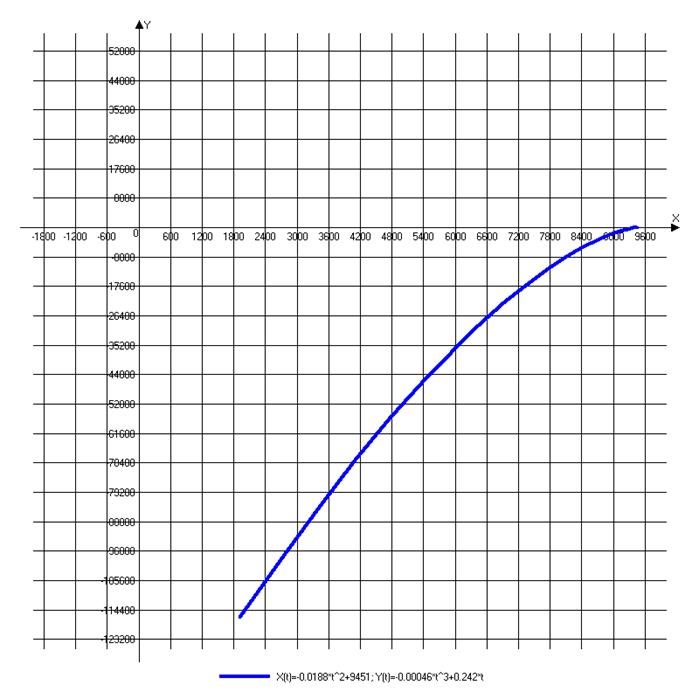
По данным таблицы 1 строим годограф Михайлова (рисунок 6).
Рисунок 6 ‑ Годограф Михайлова
Для устойчивости системы необходимо, чтобы годограф Михайлова обошел в положительном направлении (против часовой стрелки) последовательно Синтез линейной системы автоматического регулирования по логарифмическим частотным характеристикам Построение ЛАЧХ исходной системы Асимптотическую ЛАЧХ Построение желаемой ЛАЧХ Желаемую ЛАЧХ построим на основании требований, предъявляемых к свойствам системы по методу В.В. Солодовникова. Желаемую ЛАЧХ условно разделяют на три части: низкочастотную, среднечастотную и высокочастотную. Низкочастотная часть определяет статическую точность системы ‑ точность в установившемся режиме. Требования к системе в установившемся режиме не оговариваются, поэтому низкочастотная асимптота желаемой ЛАЧХ Высокочастотная часть желаемой ЛАЧХ незначительно влияет на динамические свойства системы. Она должна иметь такой же наклон, что и высокочастотная часть Среднечастотная асимптота определяет устойчивость, запас устойчивости, быстродействие системы. Ее параметрами являются частота среза Частоту среза Выбираем Выбираем частоту среза согласно формуле
Подставляя численные значения, получим Отмечают ее на оси частот на том же рисунке, где изображена ЛАЧХ исходной системы (рисунок 9). Через точку На оси ординат отметим точки с координатами Частоты, которым соответствуют точки пересечения прямых определяют нижнюю и верхнюю границы среднечастотного диапазона (на рисунке 9 это Отметим, что Среднечастотную асимптоту желаемой ЛАЧХ сопрягаем с низкочастотной и высокочастотной асимптотами. Сопряжение осуществляем асимптотами с наклоном –40 дБ/дек. Так как исходная система является статической. Заключение В данной курсовой работе проведен анализ и синтез линейной системы автоматического регулирования. В результате анализа преобразована структурная схема и определена передаточная функцию системы в разомкнутом состоянии, передаточная функция замкнутой системы по заданному каналу, передаточная функция замкнутой системы по ошибке. Система исследована на устойчивость по критериям Гурвица, Михайлова, Найквиста. В результате исследований установлено, что система не устойчива, определен критический коэффициент усиления. Выполнить анализ устойчивости исходной системы по логарифмическим частотным характеристикам, оценен запас устойчивости по модулю и фазе. Выполнен синтез системы автоматического регулирования на основе заданных показателей качества. Составлены передаточные функции скорректированной системы и корректирующего устройства. Построен переходный процесс в линейной скорректированной системе при единичном задающем воздействии. Определены основные показатели качества скорректированной системы автоматического регулирования. Выбрана схема и рассчитаны параметры корректирующего устройства. Введение Темой работы является анализ и синтез замкнутой линейной системы автоматического регулирования САР. Выполнение курсовой работы способствует более глубокому пониманию курса и получению практических навыков расчета и проектирования систем автоматического регулирования. При выполнении курсового проекта решаются вопросы, охватывающие почти все разделы теории стационарных непрерывных линейных систем автоматического регулирования. Большое внимание уделено преобразованию структурных схем и составлению передаточных функций системы, различным способам исследования устойчивости, построению переходного процесса, оценке качества систем в установившемся и переходном режимах, а также синтезу корректирующего устройства, обеспечивающего заданные показатели качества регулирования. Решение отдельных задач курсового проекта требует применения справочного материала (номограмм, диаграмм, таблиц и пр.), основная часть которого приводится в методических указаниях. Приведенные методы расчета позволяют решать задачи с использованием электронной вычислительной техники на основе стандартных программ современных ЭВМ.
Анализ линейной системы автоматического регулирования 1.1 Преобразование структурной схемы и определение передаточных функций системы Приведем заданную структурную схему к одноконтурной с помощью последовательных преобразований (рисунок 2).
Рисунок 2 – Преобразование исходной структурной схемы
На рисунке 2 приняты следующие обозначения:
Передаточные функции элементов прямой цепи
Передаточная функция возмущающего воздействия
Передаточная функция прямой цепи
где
Подставив численные значения, получим
Передаточная функция разомкнутой системы
где
Подставив численные значения, получим
Передаточная функция замкнутой системы по задающему воздействию для выходной величины
где
Подставив численные значения, получим
При получении передаточной функции по возмущающему воздействию полагаем, что задающее воздействие
Рисунок 3 – Структурная схема по возмущающему воздействию для выходной величины
Далее, используя правило переноса сумматора через звено, получим эквивалентную структурную схему (рисунок 4).
Рисунок 4 – Эквивалентная схема по возмущающему воздействию для выходной величины На рисунке 4 принято следующее условное обозначение:
Тогда передаточная функция замкнутой системы по возмущающему воздействию для выходного сигнала запишется в виде
Раскрыв, данное соотношение, получим
где
собственного оператора;
вия. Подставив численные значения, получим
Передаточная функция замкнутой системы по задающему воздействию для ошибки
где Преобразуя данное отношение, получим
где
Подставив численные значения, получим
При получении передаточной функции по возмущающему воздействию полагаем, что задающее воздействие
Рисунок 5 – Эквивалентная структурная схема по возмущающему воздействию для ошибки Передаточная функция замкнутой системы по возмущающему воздействию для ошибки
Раскрыв, данное соотношение, получим
где
собственного оператора;
вия. Подставив численные значения, получим
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1658; Нарушение авторского права страницы
 . (1.17)
. (1.17) . (1.18)
. (1.18) .
. .
. для данной системы из условия
для данной системы из условия , (1.19)
, (1.19) .
.
 на комплексной плоскости при изменении частоты
на комплексной плоскости при изменении частоты  от 0 до
от 0 до  , называемую годографом Михайлова.
, называемую годографом Михайлова.
 (1.20)
(1.20) , (1.21)
, (1.21) и
и  , – вещественная и мнимая части
, – вещественная и мнимая части  . (1.22)
. (1.22) . (1.23)
. (1.23)
 квадрантов (где
квадрантов (где  построим по передаточной функции исходной системы согласно методике, рассмотренной в п. 1.4 (рисунок 8).
построим по передаточной функции исходной системы согласно методике, рассмотренной в п. 1.4 (рисунок 8). должна совпадать с низкочастотной асимптотой исходной системы
должна совпадать с низкочастотной асимптотой исходной системы  , наклон, выражаемый в децибелах на декаду и диапазон частот.
, наклон, выражаемый в децибелах на декаду и диапазон частот. и по фазе выбирают по заданным значениям максимального перерегулирования
и по фазе выбирают по заданным значениям максимального перерегулирования  и времени регулирования
и времени регулирования  . в соответствии с номограммами предложенными Солодовниковым В.В. 5.24, 5.25, с.272 [3].
. в соответствии с номограммами предложенными Солодовниковым В.В. 5.24, 5.25, с.272 [3]. ,
,  ,
,  .
. . (2.1)
. (2.1)
 .
. , через которые проведем пунктиром горизонтальные прямые до пересечения их с линией
, через которые проведем пунктиром горизонтальные прямые до пересечения их с линией  и
и  ).
). ,
, 
 ‑ передаточные функции элементов прямой цепи;
‑ передаточные функции элементов прямой цепи;  ‑ передаточная функция возмущающего воздействия;
‑ передаточная функция возмущающего воздействия;  ‑ входной и выходной сигналы соответственно.
‑ входной и выходной сигналы соответственно. ,
,  , (1.1)
, (1.1) . (1.2)
. (1.2) , (1.3)
, (1.3) ‑ общий коэффициент усиления прямой цепи;
‑ общий коэффициент усиления прямой цепи;  ‑ коэффициенты собственного оператора.
‑ коэффициенты собственного оператора. . (1.4)
. (1.4) , (1.5)
, (1.5) (1.6)
(1.6) , (1.7)
, (1.7) ‑ коэффициенты собственного оператора.
‑ коэффициенты собственного оператора. . (1.8)
. (1.8) . Для получения передаточной функции по возмущающему воздействию для выходной величины преобразуем структурную схему к виду, показанному на рисунке 3
. Для получения передаточной функции по возмущающему воздействию для выходной величины преобразуем структурную схему к виду, показанному на рисунке 3
 ‑ передаточная функция дополнительного звена.
‑ передаточная функция дополнительного звена. . (1.9)
. (1.9) , (1.10)
, (1.10) ‑ общий коэффициент усиления по возмущающему воздействию;
‑ общий коэффициент усиления по возмущающему воздействию;  ‑ коэффициенты оператора возмущающего воздейст-
‑ коэффициенты оператора возмущающего воздейст- . (1.11)
. (1.11) , (1.12)
, (1.12) ‑ передаточная функция разомкнутой системы.
‑ передаточная функция разомкнутой системы. , (1.13)
, (1.13) ‑ коэффициенты оператора по ошибке воздействия.
‑ коэффициенты оператора по ошибке воздействия. . (1.14)
. (1.14)
 .
. , (1.15)
, (1.15)