
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение размеров барабана
СОДЕРЖАНИЕ БАШЕННЫЙ КРАН КБ-160.2. 2 Механизм передвижения. 3 Схема передвижения. 4 Механизм поворота. 5 Схема поворота крана. 6 I.РАСЧЕТ ЭЛЕКТРОРЕВЕРСИВНОЙ ЛЕБЕДКИ.. 7 1. Определение усилия в канате, навиваемом на барабан. 8 2. Подбор каната по разрывному усилию.. 8 3. Определение размеров барабана. 9 4. Подбор электродвигателя. 10 5. Подбор редуктора. 10 Схема редуктора. 11 6. Подбор тормоза. 12 Схема тормоза. 13 II.РАСЧЕТ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОСТИ ОБОРУДОВАНИЯ.. 14 1. Определение высоты подъема крюка. 15 2. Коэффициент использования крана по грузоподъёмности. 15 3. План рабочей зоны крана. 15 4. Определение продолжительности операций рабочего цикла крана. 16 5. Определение сменной производительности крана. 17 6. Схема построения рабочего цикла крана без совмещения операций. 17 7. Схема построения рабочего цикла при совмещении операций. 17
Башенный кран КБ – 160.2
Краны серии КБ-160 имеют базу 6м. Стрела крана, а также все несущие конструкции сделаны из металлических труб в виде решётчатой конструкции и соединяются между собой с помощью фланцевых соединений. Выполнена в виде плоской конструкции. На платформу устанавливаются портал. В передней части сверху находятся проушины опорного шарнира. Сбоку находятся шкафы с электрическим оборудованием крана (командоконтроллеры, пускатели и пр.). Сзади к поперечной балке приварены тяги для крепления нижней обоймы стрелового полиспаста. На поперечные балке при монтаже крана укладываются главные плиты балласта (30 т). К продольным балкам крепятся раскосы и стойки, которые вместе образуют 2-ногую стойку. К этой стойке шарнирно присоединены рабочие подкосы, служащие для удержания башни в вертикальном положении. На платформе также находятся основные механизмы крана — механизм поворота, грузовая и стреловая лебёдки. По бокам стальными тяговыми шпильками крепятся два блока противовеса. Платформа опирается на ходовую раму с поворотными опорами (имеет в рабочем положении Х-образную форму) и соединяется с ней при помощи поворотного механизма, называемого устройством опорно-поворотным (сокр. ОПУ). Поворотный механизм на базовой модели крана КБ-160 выглядит как роликовый круг (в два ряда). Портал крана имеет 4-х гранную конструкцию, которая сверху и снизу открыта для прохода секций башни. На поворотной платформе портал крепится на ферме шпренгельной и удерживается при помощи специальных подкосов, имеющих телескопическую конструкцию. Башня крана является поворотной, подращиваемой снизу, переменной высоты (в зависимости от количества установленных инвентарных секций). Содержит макушку башни (оголовок), головную секцию, дополнительные (инвентарные) секции, распорки с блоками. На ней находятся — кабина управления (справа по оси крана), крепления для подъёмной стрелы (спереди). В рабочем положении башня крепится в нижнем ярусе диагональными балками. Стрела выполнена из трёх частей (секций). Относится к наклонным стрелам. Крепится к головной секции башни. Вылет меняется путём изменения угла наклона к горизонту. На её конце смонтированы специальный ограничитель подъёма крюка (т. н. ОВП), грузовые лебёдки (блоки) и крепления расчала стрелы, который служит для её удержания.
Механизм передвижения Мезанизм передвижения башенных кранов состоит из электродвигателей, соединенной муфты и колодочного тормоза, редуктора, выдущих шестерен и забчатых венцов, соединенных с ободами ходовых колес. На ходовой раме приклеплены четыре поворотные опоры-флюгеры с креплениями под тележки крана. Поворотные опоры-флюгеры фиксируются в двух положениях – рабочем и транспортном ( рабочее – крепление к опорным тележкам, траспортное – крепление к опорной базе). КБ-160.2 опирается на четыре двухколесных опорных тележки ( применяются унифицированные тележки для кранов с грузовым моментом до 200 т*м), две из которых являются ведущими, так как имеют электропривод. Для крана используются рельсы типа Р-43 или Р-50. Могут использоваться как прямые, так и рельсы с закруглением.
Механизм поворота
Механизм поворота предназначен для вращения поворотной части крана вокруг вертикальной оси. Поворотная платформа выполнена в виде плоской конструкции. На платформу устанавливаются портал. В передней части сверху находятся проушины опорного шарнира. Сбоку находятся шкафы с электрическим оборудованием крана (командоконтроллеры, пускатели и пр.). Сзади к поперечной балке приварены тяги для крепления нижней обоймы стрелового полиспаста. На поперечные балке при монтаже крана укладываются главные плиты балласта (30 т). К продольным балкам крепятся раскосы и стойки, которые вместе образуют 2-ногую стойку. К этой стойке шарнирно присоединены рабочие подкосы, служащие для удержания башни в вертикальном положении. На платформе также находятся основные механизмы крана — механизм поворота, грузовая и стреловая лебёдки. По бокам стальными тяговыми шпильками крепятся два блока противовеса. Платформа опирается на ходовую раму с поворотными опорами (имеет в рабочем положении Х-образную форму) и соединяется с ней при помощи поворотного механизма, называемого устройством опорно-поворотным (сокр. ОПУ). Поворотный механизм на базовой модели крана КБ-160 выглядит как роликовый круг (в два ряда).
Схема поворота крана
ИСХОДНЫЕ ДАННЫЕ
Основной грузоподъемный механизм – лебедка, применяется как самостоятельно, так и в качестве составной части строительных кранов. Лебедка состоит из барабана, на который навивается канат, зубчатых и червячных передач, тормоза и двигателя.
Схема лебедки подъема груза Схема подвески груза (В)
Однобарабанные реверсивные лебедки с электроприводом пригодны в комбинации с полиспастами для подъема грузов любой массы. Лебедки этого типа имеют сварную раму, на которой установлен барабан, двухступенчатый зубчатый редуктор, тормоз, электродвигатель. Электродвигатель с редуктором соединяется упругой муфтой, одна из половин которой является одновременно тормозным шквалом. Тормоз двухколодочный с короткоходовым электромагнитом. Электрическая часть магнита включена параллельно электродвигателю привода. Спуск груза принудительный – реверсированием (изменением направления вращения) двигателя. Скорость спуска равна скорости подъёма или несколько превышает её.
Q – вес поднимаемого груза =3 т q = 0, 5× Q – вес подвесных приспособлений, кН (принимается за 5% от веса груза)
η бл – КПД блока на подшипниках скольжения = 0, 96 Вес поднимаемого груза
Для механизма подъёма башенных кранов и строительных лебедок принимаются, как правило, стальные канаты с одним органическим сердечником и числом проволоки 6 Канат подбирается по допускаемому разрывному усилию:
К – коэффициент запаса прочности каната, принимаемый в зависимости от режима работы механизма. Для легкого режима работы 5. Подбираем канат по ГОСТ 3070-74, канат двойной свивки типа ТК конструкции 6
d = 27 мм – диаметр каната S Проверяем фактический коэффициент запаса прочности:
К – принятый коэффициент запаса прочности Sp – фактическое разрывное усилие, кН Sк –усилие в канате, навиваемом на барабан, кН
Подбор электродвигателя Для привода подъемных крановых механизмов, работающих при поворотно- кратковременном режиме, используются электродвигатели с фазовым ротором серии МТ, АК или с короткозамкнутым ротором серии МТК, А02. Nдв – мощность электродвигателя
Sk – тяговое усилие на барабане, Н Vk – скорость навивки каната на барабан, м/сек
Vг– скорость подъема груза
Подбираем электродвигатель: Для легкого режима работы принимаем крановый электродвигатель типа МТ-71-10. Nдв= 96 кВт 2. Подбор редуктора Определяем nб – скорость вращения барабана по среднему диаметру навивки каната:
Vk – скорость навивки каната на барабан, м/сек Dср – средний диаметр барабана, м
Общее передаточное отношение редуктора определяется по формуле:
nдв– число оборотов двигателя, об/мин nб– скорость вращения барабана, об/мин Подбираем редуктор по передаточному числу, синхронной скорости вращения двигателя, режиму работы и межцентровому расстоянию входного и выходного валов.
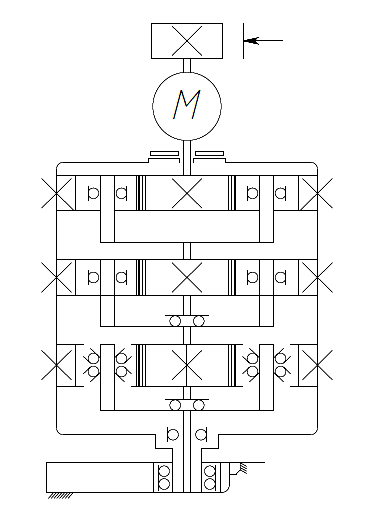
Принимаем редуктор PM-250. Его характеристика, максимальная мощность, которая может быть передана редуктором при 600 об/мин вала двигателя 96 кВт. А=250мм АT=150мм АБ=100мм L=540мм B=230мм dBX= 17мм Схема редуктора
Фактическое число оборотов барабана:
Фактическая скорость каната:
Действительная скорость подъема груза:
Подбор тормоза В электрореверсивных лебедках устанавливаются нормально замкнутые колодочные тормоза, замыкаемые грузом и размыкаемые электромагнитом. Тормозной шкив выполняется заодно с одной половиной упругой муфты, соединяющей вал двигателя с валом редуктора. Муфта подбирается по диаметру вала и моменту, который должен быть создан тормозом. Крутящий момент на валу тормозного шкива определяется:
N – мощность двигателя, Вт n – число оборотов двигателя в минуту Силы трения в передаче(редукторе) помогают затормаживанию, поэтому момент, подлежащий затормаживанию, определяется по формуле:
Подбираем тормозную муфту: Dт=400 мм Размеры тормозных рычагов: b=420 мм, a=210 мм, с=120 мм, е=160 мм Расчетное усилие на ободе тормозного шкива определяется по формуле:
Сила прижатия тормозных колодок определяется:
Принимаем в качестве обшивок колодок тканевую асбестовую ленту с коэффициентом трения Усилие в тяге двухколодочного тормоза:
а, b, с, е – размеры тормозных рычагов, мм Определяем вес тормозного груза:
l1 = е = 160 мм lгр = K· l1 = 120·4=480 мм Определяем растормаживающее усилие электромагнита:
Расстояние Lм принимают равным Lм= Путь тяги электромагнита (максимальный ход) определяется как:
Принимаем электромагнит переменного тока типа КМТ-104 с техническими данными: Км=700 Н, hэ=50 мм.
Схема тормоза
ИСХОДНЫЕ ДАННЫЕ Вариант №12 Технические характеристики башенного крана
План рабочей зоны крана
СОДЕРЖАНИЕ БАШЕННЫЙ КРАН КБ-160.2. 2 Механизм передвижения. 3 Схема передвижения. 4 Механизм поворота. 5 Схема поворота крана. 6 I.РАСЧЕТ ЭЛЕКТРОРЕВЕРСИВНОЙ ЛЕБЕДКИ.. 7 1. Определение усилия в канате, навиваемом на барабан. 8 2. Подбор каната по разрывному усилию.. 8 3. Определение размеров барабана. 9 4. Подбор электродвигателя. 10 5. Подбор редуктора. 10 Схема редуктора. 11 6. Подбор тормоза. 12 Схема тормоза. 13 II.РАСЧЕТ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОСТИ ОБОРУДОВАНИЯ.. 14 1. Определение высоты подъема крюка. 15 2. Коэффициент использования крана по грузоподъёмности. 15 3. План рабочей зоны крана. 15 4. Определение продолжительности операций рабочего цикла крана. 16 5. Определение сменной производительности крана. 17 6. Схема построения рабочего цикла крана без совмещения операций. 17 7. Схема построения рабочего цикла при совмещении операций. 17
Башенный кран КБ – 160.2
Краны серии КБ-160 имеют базу 6м. Стрела крана, а также все несущие конструкции сделаны из металлических труб в виде решётчатой конструкции и соединяются между собой с помощью фланцевых соединений. Выполнена в виде плоской конструкции. На платформу устанавливаются портал. В передней части сверху находятся проушины опорного шарнира. Сбоку находятся шкафы с электрическим оборудованием крана (командоконтроллеры, пускатели и пр.). Сзади к поперечной балке приварены тяги для крепления нижней обоймы стрелового полиспаста. На поперечные балке при монтаже крана укладываются главные плиты балласта (30 т). К продольным балкам крепятся раскосы и стойки, которые вместе образуют 2-ногую стойку. К этой стойке шарнирно присоединены рабочие подкосы, служащие для удержания башни в вертикальном положении. На платформе также находятся основные механизмы крана — механизм поворота, грузовая и стреловая лебёдки. По бокам стальными тяговыми шпильками крепятся два блока противовеса. Платформа опирается на ходовую раму с поворотными опорами (имеет в рабочем положении Х-образную форму) и соединяется с ней при помощи поворотного механизма, называемого устройством опорно-поворотным (сокр. ОПУ). Поворотный механизм на базовой модели крана КБ-160 выглядит как роликовый круг (в два ряда). Портал крана имеет 4-х гранную конструкцию, которая сверху и снизу открыта для прохода секций башни. На поворотной платформе портал крепится на ферме шпренгельной и удерживается при помощи специальных подкосов, имеющих телескопическую конструкцию. Башня крана является поворотной, подращиваемой снизу, переменной высоты (в зависимости от количества установленных инвентарных секций). Содержит макушку башни (оголовок), головную секцию, дополнительные (инвентарные) секции, распорки с блоками. На ней находятся — кабина управления (справа по оси крана), крепления для подъёмной стрелы (спереди). В рабочем положении башня крепится в нижнем ярусе диагональными балками. Стрела выполнена из трёх частей (секций). Относится к наклонным стрелам. Крепится к головной секции башни. Вылет меняется путём изменения угла наклона к горизонту. На её конце смонтированы специальный ограничитель подъёма крюка (т. н. ОВП), грузовые лебёдки (блоки) и крепления расчала стрелы, который служит для её удержания.
Механизм передвижения Мезанизм передвижения башенных кранов состоит из электродвигателей, соединенной муфты и колодочного тормоза, редуктора, выдущих шестерен и забчатых венцов, соединенных с ободами ходовых колес. На ходовой раме приклеплены четыре поворотные опоры-флюгеры с креплениями под тележки крана. Поворотные опоры-флюгеры фиксируются в двух положениях – рабочем и транспортном ( рабочее – крепление к опорным тележкам, траспортное – крепление к опорной базе). КБ-160.2 опирается на четыре двухколесных опорных тележки ( применяются унифицированные тележки для кранов с грузовым моментом до 200 т*м), две из которых являются ведущими, так как имеют электропривод. Для крана используются рельсы типа Р-43 или Р-50. Могут использоваться как прямые, так и рельсы с закруглением.
Механизм поворота
Механизм поворота предназначен для вращения поворотной части крана вокруг вертикальной оси. Поворотная платформа выполнена в виде плоской конструкции. На платформу устанавливаются портал. В передней части сверху находятся проушины опорного шарнира. Сбоку находятся шкафы с электрическим оборудованием крана (командоконтроллеры, пускатели и пр.). Сзади к поперечной балке приварены тяги для крепления нижней обоймы стрелового полиспаста. На поперечные балке при монтаже крана укладываются главные плиты балласта (30 т). К продольным балкам крепятся раскосы и стойки, которые вместе образуют 2-ногую стойку. К этой стойке шарнирно присоединены рабочие подкосы, служащие для удержания башни в вертикальном положении. На платформе также находятся основные механизмы крана — механизм поворота, грузовая и стреловая лебёдки. По бокам стальными тяговыми шпильками крепятся два блока противовеса. Платформа опирается на ходовую раму с поворотными опорами (имеет в рабочем положении Х-образную форму) и соединяется с ней при помощи поворотного механизма, называемого устройством опорно-поворотным (сокр. ОПУ). Поворотный механизм на базовой модели крана КБ-160 выглядит как роликовый круг (в два ряда).
Схема поворота крана
ИСХОДНЫЕ ДАННЫЕ
Основной грузоподъемный механизм – лебедка, применяется как самостоятельно, так и в качестве составной части строительных кранов. Лебедка состоит из барабана, на который навивается канат, зубчатых и червячных передач, тормоза и двигателя.
Схема лебедки подъема груза Схема подвески груза (В)
Однобарабанные реверсивные лебедки с электроприводом пригодны в комбинации с полиспастами для подъема грузов любой массы. Лебедки этого типа имеют сварную раму, на которой установлен барабан, двухступенчатый зубчатый редуктор, тормоз, электродвигатель. Электродвигатель с редуктором соединяется упругой муфтой, одна из половин которой является одновременно тормозным шквалом. Тормоз двухколодочный с короткоходовым электромагнитом. Электрическая часть магнита включена параллельно электродвигателю привода. Спуск груза принудительный – реверсированием (изменением направления вращения) двигателя. Скорость спуска равна скорости подъёма или несколько превышает её.
Q – вес поднимаемого груза =3 т q = 0, 5× Q – вес подвесных приспособлений, кН (принимается за 5% от веса груза)
η бл – КПД блока на подшипниках скольжения = 0, 96 Вес поднимаемого груза
Для механизма подъёма башенных кранов и строительных лебедок принимаются, как правило, стальные канаты с одним органическим сердечником и числом проволоки 6 Канат подбирается по допускаемому разрывному усилию:
К – коэффициент запаса прочности каната, принимаемый в зависимости от режима работы механизма. Для легкого режима работы 5. Подбираем канат по ГОСТ 3070-74, канат двойной свивки типа ТК конструкции 6
d = 27 мм – диаметр каната S Проверяем фактический коэффициент запаса прочности:
К – принятый коэффициент запаса прочности Sp – фактическое разрывное усилие, кН Sк –усилие в канате, навиваемом на барабан, кН
Определение размеров барабана Канаты навиваются на барабаны. В зависимости от длины навиваемого каната последний укладывается на барабан в один или несколько слоев. Барабаны, на которые наматывают канат в несколько слоев, имеют гладкую поверхность и борта, во избежание сползания каната. Диаметр барабана по центрам первого слоя навивки каната определяется в зависимости от коэффициента l, принимаемого по нормам Гостехнадзора для стреловых кранов – при легком режиме l=16м.
dк – диаметр каната=14, 5мм Конструктивный диаметр барабана определяется по формуле:
Dб – диаметр барабана по центрам первого слоя навивки Рабочая длина барабана lбопределяется исходя из канатоемкости барабана и числа слоев навивики каната. Для многослойной навивки:
m – число слоев навивки каната, принимаемое так, чтобы:
Пусть m=2, тогда lб = 377 мм
Длина каната должна быть такой, чтобы при опускании грузового крюка до нижнего положения на барабане лебёдки оставалось не менее полутора витков каната, не считая, находящихся под зажимным устройством, поэтому число запасных витков каната принимаем равным 2. Конструктивная рабочая длина барабана принимается с округлением вычисленной рабочей длины в большую сторону, до целых сантиметров. Толщина реборд принимается конструктивно
Lб – полная длина барабана
hp – высота реборд над последним слоем каната должна быть не менее
Dбреб– диаметр барабана по ребордам
Подбор электродвигателя Для привода подъемных крановых механизмов, работающих при поворотно- кратковременном режиме, используются электродвигатели с фазовым ротором серии МТ, АК или с короткозамкнутым ротором серии МТК, А02. Nдв – мощность электродвигателя
Sk – тяговое усилие на барабане, Н Vk – скорость навивки каната на барабан, м/сек
Vг– скорость подъема груза
Подбираем электродвигатель: Для легкого режима работы принимаем крановый электродвигатель типа МТ-71-10. Nдв= 96 кВт 2. Подбор редуктора Определяем nб – скорость вращения барабана по среднему диаметру навивки каната:
Vk – скорость навивки каната на барабан, м/сек Dср – средний диаметр барабана, м
Общее передаточное отношение редуктора определяется по формуле:
nдв– число оборотов двигателя, об/мин nб– скорость вращения барабана, об/мин Подбираем редуктор по передаточному числу, синхронной скорости вращения двигателя, режиму работы и межцентровому расстоянию входного и выходного валов.
Принимаем редуктор PM-250. Его характеристика, максимальная мощность, которая может быть передана редуктором при 600 об/мин вала двигателя 96 кВт. А=250мм АT=150мм АБ=100мм L=540мм B=230мм dBX= 17мм Схема редуктора
Фактическое число оборотов барабана:
Фактическая скорость каната:
Действительная скорость подъема груза:
Подбор тормоза В электрореверсивных лебедках устанавливаются нормально замкнутые колодочные тормоза, замыкаемые грузом и размыкаемые электромагнитом. Тормозной шкив выполняется заодно с одной половиной упругой муфты, соединяющей вал двигателя с валом редуктора. Муфта подбирается по диаметру вала и моменту, который должен быть создан тормозом. Крутящий момент на валу тормозного шкива определяется:
N – мощность двигателя, Вт n – число оборотов двигателя в минуту Силы трения в передаче(редукторе) помогают затормаживанию, поэтому момент, подлежащий затормаживанию, определяется по формуле:
Подбираем тормозную муфту: Dт=400 мм Размеры тормозных рычагов: b=420 мм, a=210 мм, с=120 мм, е=160 мм Расчетное усилие на ободе тормозного шкива определяется по формуле:
Сила прижатия тормозных колодок определяется:
Принимаем в качестве обшивок колодок тканевую асбестовую ленту с коэффициентом трения Усилие в тяге двухколодочного тормоза:
а, b, с, е – размеры тормозных рычагов, мм Определяем вес тормозного груза:
l1 = е = 160 мм lгр = K· l1 = 120·4=480 мм Определяем растормаживающее усилие электромагнита:
Расстояние Lм принимают равным Lм= Путь тяги электромагнита (максимальный ход) определяется как:
Принимаем электромагнит переменного тока типа КМТ-104 с техническими данными: Км=700 Н, hэ=50 мм.
Схема тормоза
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1928; Нарушение авторского права страницы


 Лебедки с механическим приводом выполняются одно- или многобарабанными, с приводом от электродвигателя.
Лебедки с механическим приводом выполняются одно- или многобарабанными, с приводом от электродвигателя.
 =
= 
 – кратность полиспаста
– кратность полиспаста пол – КПД полиспаста
пол – КПД полиспаста =
=  = 0, 95
= 0, 95
 9=114 или 6× 37=222
9=114 или 6× 37=222
 = 1800 мПа – маркировочная группа по временному сопротивлению разрыву
= 1800 мПа – маркировочная группа по временному сопротивлению разрыву = 387 кН – расчетное разрывное усилие каната
= 387 кН – расчетное разрывное усилие каната




 – КПД механизма лебедки
– КПД механизма лебедки

 , м/сек
, м/сек – кратность полиспаста
– кратность полиспаста








 1140, 1 Нм
1140, 1 Нм

 – коэффициент трения фрикционного материала (накладок ленты) о тормозной шкив:
– коэффициент трения фрикционного материала (накладок ленты) о тормозной шкив: 




 =(0, 8÷ 2, 0) мм – радиальный зазор между тормозной колодкой и шкивом
=(0, 8÷ 2, 0) мм – радиальный зазор между тормозной колодкой и шкивом – кратность системы рычагов
– кратность системы рычагов

 =16
=16  14, 5=230мм
14, 5=230мм =230-14, 5=215, 5 мм
=230-14, 5=215, 5 мм


 380 мм
380 мм
 , где dк – диаметр каната.
, где dк – диаметр каната.
 =380+2·20 = 420 мм
=380+2·20 = 420 мм = 2, 5·14, 5 =36, 25 мм, во избежание сползания каната.
= 2, 5·14, 5 =36, 25 мм, во избежание сползания каната. – толщина стенки барабана
– толщина стенки барабана +(6÷ 10) =0, 02·215, 5+10=14, 31мм
+(6÷ 10) =0, 02·215, 5+10=14, 31мм =215, 5+2·2·14, 5+2·36, 25=346 мм
=215, 5+2·2·14, 5+2·36, 25=346 мм