
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Вопрос. Колебательная система автомобиля.
Ответ. Автомобиль представляет собой колебательную систему, состоящую из нескольких масс — кузова, колес, двигателя, кабины и др., связанных между собой упругими связями и демпферами (затуханием). Эти массы делят прежде всего на подрессоренные и неподрессоренные. Подрессоренной частью автомобиля являются все его элементы, вес которых передается рессорам (упругому устройству подвески). Те элементы, сила тяжести которых не передается через упругое устройство подвески, называют неподрессоренными элементами автомобиля. Таким образом, подрессоренными элементами автомобиля являются кузов и рама с укрепленными на ней механизмами, а неподрессоренными — колеса в сборе с осями (мостами). Массу упругих элементов, рычагов направляющего устройства, амортизаторов, тяг рулевого привода и карданного вала относят частично к массе подрессоренных, а частично к массе неподрессоренных частей. В настоящее время массу всех этих частей условно делят между подрессоренной и неподрессоренными частями пополам. Число возможных перемещений масс автомобиля весьма велико. Кузов, например, может испытывать поступательные перемещения вдоль трех координатных осей и угловые перемещения вокруг них (рис. 17). Значения всех этих перемещений различны. Колебания кузова в вертикальной продольной плоскости, характеризующиеся поступательным перемещением z вдоль вертикальной оси (т. е. покачиванием и угловыми колебаниями вокруг поперечной оси) и галопированием, оказывают основное влияние на плавность хода автомобиля. Покачивание и галопирование совершаются на упругом устройстве подвески и шинах. Колебания кузова в поперечной плоскости, характеризующиеся угловым перемещением р вокруг продольной оси или пошатыванием, влияют в основном на управляемость и устойчивость автомобиля при действии боковых сил. Колебания кузова вдоль поперечной оси (боковое подергивание), соответствующие изменению координаты у, а также угло- вые колебания вокруг вертикальной оси, характеризующиеся координатой γ (рысканье), обусловлены боковой упругостью шин. Эти колебания могут влиять на управляемость и устойчивость автомобиля. Если, например, при неблагоприятном сочетании параметров автомобиля колебания вокруг вертикальной оси станут неустойчивыми, то поступательное движение автомобиля будет сопровождаться рысканьем, резко ухудшающим управляемость и устойчивость автомобиля на дороге
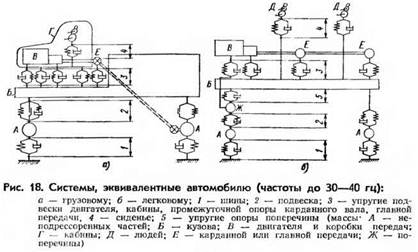
Колебания кузова вдоль продольной оси (подергивание), соответствующие изменению координаты х, обусловлены горизонтальными составляющими X реакции дороги, зависящими от неровностей ее микропрофиля. Влияние подергивания на плавность хода приходится учитывать, например, при высоком расположении сиденья водителя. Продольные колебания представляют также интерес при изучении дополнительных нагрузок на трансмиссию или тех дополнительных сопротивлений движению, которые испытывает автомобиль, передвигаясь по неровной дороге. Учитывая различные цели исследований, рассмотрим экивалентные системы, соответствующие колебаниям в продольной и поперечной плоскостях, а также вдоль продольной оси автомобиля. Можно показать, что для обычного автомобиля, симметричного относительно продольной оси, колебания в поперечной и продольной плоскостях протекают независимо друг от друга. При рассмотрении продольных колебаний автомобиля будет показана их связь с колебаниями в продольной плоскости, позволяющая переходить, при необходимости, к более общим случаям. Колебания в продольной плоскости. Колебательная система, эквивалентная автомобилю, состоит из нескольких упруго связанных масс. Вид ее зависит от конструктивных особенностей автомобиля. Например, колебательная система, эквивалентная грузовому автомобилю (рис. 18, а), имеет неподрессоренную А и подрессоренную Б части, опирающиеся на дорогу через шины, моделированные пружиной и демпфером 1, характеризующими радиальную жесткость шины и затухание в ней. Подвески 2 автомобиля — рессорные, с амортизаторами спереди. Рессоры предполагают плохо смазанными, и поэтому переднюю подвеску моделируют пружиной, амортизатором
и источником сухого трения, а заднюю — пружиной и источником сухого трения. С подрессоренной частью связаны упругими подвесками 3 массы двигателя В, кабины Г и карданного вала Е. С кабиной, в свою очередь, через сиденье 4 связан человек Д. Особенностями эквивалентной системы для легкового автомобиля (рис. 18, б) являются: наличие спереди поперечины Ж, упруго связанной с кузовом (несущей системой) Б; независимая подвеска задних колес, при которой масса Е главной передачи упруго связана с кузовом; практическое отсутствие сухого трения в подвесках; наличие упругого крепления амортизаторов. Эти системы можно было бы детализировать далее, учитывая, например, жесткость при изгибе рамы автомобиля и др. Однако переход к колебательной системе, отражающей автомобиль во всех его деталях, нецелесообразен не только из-за громоздкости, но п в связи с тем, что анализ получающихся результатов становится трудным и менее наглядным. Поэтому следует каждый раз упрощать эквивалентную систему настолько, насколько это позволяют условия задачи. Основанием для упрощения данных систем (рис. 18) является различие частот собственных колебаний масс автомобиля: кузова 1—3 гц; колес 7—12 гц. Частоты колебания остальных масс автомобиля более высокие, поэтому условимся относить их к вибрационным частотам. Учитывая задачи книги и ограничиваясь рассмотрением данных колебаний, перейдем к эквивалентной системе (рис. 19, а). Здесь имеются три массы: подрессоренная М, рассматриваемая, как твердое тело, в которое включены все упруго связанные с ней массы; неподрессоренные массы т1 и m2, соединенные упругими элементами, имеющими жесткость 2ср и соответ- ствующими упругому устройству подвески, и амортизаторами с коэффициентом сопротивления 2k, характеризующим гасящее устройство подвески. Неподрессоренные массы связаны с дорогой пружинами, имеющими жесткость 2сш, и амортизаторами с коэффициентом сопротивления 2kш, отражающим затухание в шинах. Эти величины характеризуют радиальную жесткость шины и трение в ней, обусловливающее сопротивление колебаниям.
Это выражение применимо для большинства рычажных подвесок. Однако в некоторых случаях (например, при построении характеристик направляющего устройства подвески) приходится проводить более точные расчеты, учитывая изменение развала колес и т. д. [38]. Используя обозначения рис. 20, в, получим
В общем случае величины ср и ср могут быть непостоянными. Тогда Графически жесткость может быть определена как тангенс угла наклона касательной, проведенной к рассматриваемой точке характеристики упругого элемента Zp — Ф (zр) или подвески Z = Ф (z). Характеристика металлических упругих элементов чаще всего линейна, а характеристика подвески, обусловленная влиянием рычажной связи, обычно нелинейна. В предварительных расчетах, связанных особенно с расчетом колебаний, жесткость ср принимают постоянной, что в ряде случаев, например при трапециевидной подвеске, может быть сделано без больших погрешностей. Коэффициент сопротивления k условного амортизатора, характеризующего затухание в подвеске, также может отличаться от коэффициента сопротивления ka истинного амортизатора. При переходе от коэффициента ka к коэффициенту k учитывают имеющуюся рычажную связь аналогично тому, как это делают при замене действительного упругого элемента приведенным. Например, при вертикальных колебаниях сила Zam нa конце рычага амортизатора (см. рис. 20, а) связана с силой Za, действующей на поршни амортизатора, зависимостью
Полагая сопротивление амортизатора пропорциональным отно- сительной скорости, т. е. Za = kazom, перейдем от действительно Для схемы рис. 20, в коэффициент сопротивления приведенного амортизатора (правая часть схемы)
Для схемы рис. 20, б аналогично найдем
го амортизатора к приведенному (правая часть рис. 20, а). Пользуясь равенством моментов сил, получим В этих выражениях коэффициент при ka называют иногда передаточным числом привода. В общем случае коэффициент сопротивления ka = dZa /dzот т.е. равен тангенсу угла наклона касательной, проведенной в рассматриваемой точке к характеристике амортизатора Za = Ф(zот). Колебания пассажира на сиденье учтем позднее, а пока считаем, что они не влияют на колебания автомобиля. Для колебательной системы рис. 19 будем считать, что вертикальные силы передаются кузову только через упругие элементы и амортизаторы, что справедливо для автомобилей с рессорными зависимыми или свечными подвесками и является допущением для рычажных подвесок (см. рис. 20, б и в). Выбранная эквивалентная система обладает четырьмя степенями свободы. Составим уравнения движения, приняв следующие основные допущения: колебания кузова и колес малые; характеристика всех элементов линейна (в частности, жесткости и коэффициенты сопротивлений постоянны, а колеса обкатываются по микропрофилю дороги, сохраняя точечный, но постоянный контакт с ее поверхностью); оси масс автомобиля совпадают с главными осями эллипсоида инерции; на автомобиль действуют только вертикальные силы, а горизонтальная плоскость, в которой лежат центры колебаний (мгновенные центры перемещений кузова), проходит через центр тяжести кузова. Выбор координат, характеризующих положение подрессоренных и неподрессоренных масс при колебаниях, зависит от поставленной задачи. Если исследуются продольные угловые коле бания кузова, то целесообразно выбирать координаты z0 и α, т. е. вертикальное перемещение центра тяжести подрессоренной части и угол ее поворота. Можно рассматривать вертикальные перемещения точек кузова над осью передних или задних колес, т. е. координаты z1 и z2. Если изучаются деформации рессор, то полезно выбирать относительные перемещения zom. Колебания неподрессоренных масс описывают перемещениями ζ 1и ζ 2 или, если изучают, например, осадку шин, относительными перемещениями ζ om. Перечисленные координаты связаны между собой следующими зависимостями:
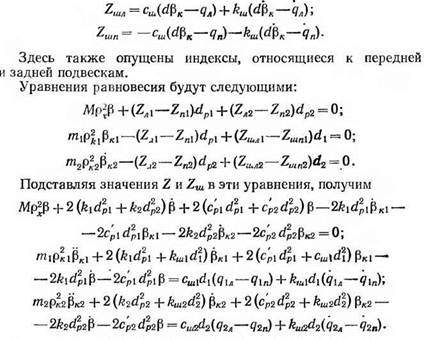
Опишем движение масс системы координатами: z0, α, ζ 1, ζ 2 и z1, z2, ζ 1, ζ 2. Это можно сделать двумя способами: составить уравнения движения для одной и другой систем и решить их; решить одну из систем и воспользоваться формулой перехода (31). Для составления уравнений движения обычно пользуются уравнениями динамики или уравнением Лагранжа. В настоящее время прибегают как к первому, более простому пути [10, 12], так и ко второму, отличающемуся большей общностью [126]. Воспользуемся уравнениями динамики, нанеся силы Zn и Zш , действующие на массы автомобиля (см. рис. 19, б). Сила Zn, передающаяся через подвеску, состоит из двух слагаемых: Zp — от упругого элемента и Za — от амортизатора. Условимся в дальнейшем вести отсчет деформаций упругих элементов и шин от положения статического равновесия, когда статическая нагрузка на элемент уравновешивается упругой силой от его статического прогиба (осадки). Вывод без этого предположения получается более громоздким (см., например, М. Ф. Гарднер и Дж. Л. Бернс. Переходные процессы в линейных системах с сосредоточенными постоянными. М., Физматгиз, 1961). На конечные результаты это, естественно, не влияет. Для масс М и т1, 2 напишем следующие уравнения равновесия:
Тогда Здесь h0 и hK0 — парциальные значения затухания. Теперь уравнения (37) примут следующий вид:
Эти уравнения часто используют для расчетов колебаний автомобиля. В тех случаях, когда искомыми являются относительные величины (прогибы упругих элементов или шин), удобно пользоваться уравнениями движения, записанными через координаты zom и ζ om. Перепишем для этого уравнения (37) так: Учитывая выражения (31), получим
Замена переменных в (41) даст искомые уравнения
Другая возможность упрощения исходной эквивалентной системы используется при изучении продольных угловых колебаний кузова. Собственная частота этих колебаний значительно ниже, чем колебаний неподрессоренных масс. Поэтому их влияние при тех частотах, когда перемещения кузова значительны, мало и ими можно в первом приближении пренебречь. Тогда спереди и сзади два упругих элемента (подвески и шины) оказываются соединенными последовательно. Заменим эти два элемента одним с жесткостью с, имеющим тот же статический прогиб, что подвеска и шины вместе. 4*
перепишем последнюю систему уравнении в виде Колебания многоосных автомобилей описываются уравнениями, подобными системе (43), так как увеличение числа осей сверх двух не вносит принципиальных изменений в уравнения движения. Перепишем уравнения (43) следующим образом: От числа осей зависит вид коэффициентов уравнений. В общем случае при n осях мы имели бы вместо kz = k1 + k2 для двухосного автомобиля
Следует подчеркнуть, что при нахождении коэффициентов связи кс и сс необходимо учитывать знак li, т. е. принимать знак «минус» у членов с l3 и l4. Представляет интерес правая часть уравнений, обусловленная неровностями микропрофиля. Мы имеем li. Отдельные слагаемые будут иметь следующий вид:
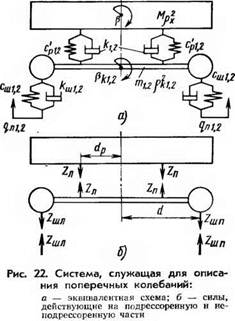
В этих выражениях опущены индексы, соответствующие подвескам передних и задних колес. Жесткость упругого элемента подвески Ср при поперечных кренах может быть иной, чем жесткость ср при вертикальных перемещениях. Так, листовые рессоры при поперечных кренах дополнительно скручиваются и их жесткость повышается тем больше, чем шире листы и жестче связь ушек рессор с пальцами и далее с опорами. Если такое повышение жесткости отсутствует, то с'р = ср. На неподрессоренные части, кроме того, действуют силы Zшл, п, передающиеся через шины,
В распространенном случае, когда собственная частота колебаний неподрессоренной части на подвеске и шинах значительно выше, чем частота колебаний подрессоренной части на подвеске, можно принять m1 = m2 = 0. Не учитывая также затухания, взамен системы уравнений (51) запишем V где cβ 1, 2 —приведенные угловые жесткости подвесок, эквивалентные угловым жесткостям двух последовательно включенных элементов (подвески и шин);
Возмущающий момент
Принятое ранее допущение о том, что подрессоренную часть можно рассматривать как твердое тело, во многих случаях анализа колебаний в поперечной плоскости недопустимо. У грузовых автомобилей рама обычно обладает высокой жесткостью при изгибе и сравнительно малой жесткостью при кручении. При большой жесткости шин и подвески грузового автомобиля иногда оказывается, что приведенные угловые жесткости подвесок и рамы являются величинами одного порядка. Грузовые автомобили имеют еще одну особенность — значительная часть их подрессоренной массы сосредоточена у задней оси. Еще большей получается разность моментов инерции частей подрессоренной массы, сосредоточенных у передней и задней осей [100]. Количественная оценка этих параметров показала, что моменты инерции подрессоренной части относительно продольной оси сзади в 4—7 раз больше, чем спереди, т. е.
При действии возмущающего момента только на передние колеса у автомобиля грузоподъемностью 4000 кГ передняя часть испытывала заметные поперечные колебания в плоскости оси колес с двумя резонансными пиками (кривая 1, рис. 23, с).
Эти колебания почти не передавались задней части машины (кривая 2). При частотах возмущения v > 15 1 /сек задняя часть автомобиля оставалась практически неподвижной. Иной получилась картина при действии возмущающего момента только на задние колеса (рис. 23, б). Здесь передняя и задняя части автомобиля колебались практически как одно целое. Следовательно, необходимо учитывать крутильную жесткость рамы грузового автомобиля, а иногда и затухание, сопутствующее крутильным колебаниям рамы. В этом случае эквивалентная система может быть представлена состоящей из двух систем с подрессоренной и неподрессоренной массами в каждой. Подрессоренные массы следует соединить упругой связью и учесть наличие затухания. Полагая приближенно характеристики связей линейными, а затухание пропорциональным относительной скорости колебаний подрессоренных масс, обозначим сн угловую жесткость, a kH затухание при угловых колебаниях в качестве параметров, характеризующих кручение рамы (несущей системы) автомобиля (рис. 24).
Система имеет четыре степени свободы, и ее уравнения движения будут следующими:
а остальные величины были приведены выше. Когда колебания в поперечной плоскости исследуют в связи с устойчивостью и управляемостью автомобиля, приходится рассматривать совместно поперечные угловые колебания, боковое подергивание и рыскание. Для упрощения задачи будем пренебрегать массой неподрессоренных частей, а последовательно включенные упругие элементы (подвеска и шины) заменим одним — пружиной с приведенными жесткостями cz в вертикальном направлении и су в боковом. Рассматриваемые колебания протекают независимо от колебаний в продольной плоскости, поэтому исходная система будет состоять из подрессоренной массы с четырьмя упругими опорами (рис. 25), причем через hkp обозначено расстояние от оси х, проходящей через центр тяжести, до параллельной ей мгновенной оси вращения (оси крена). Положение масс при колебаниях описывается тремя координатами: β, y и γ.
В последнее время появился ряд работ, в которых в связи с устойчивостью и управляемостью автомобиля колебания в вертикальной и поперечной плоскостях рассматриваются как связанные [27, 129, 131,
145]. Продольные колебания. Неровности микропрофиля дороги вызывают продольные колебания автомобиля, описываемые координатой х. Обычно интенсивность продольных колебаний значительно ниже, чем вертикальных. Однако продольные колебания могут представлять интерес, например, в таких случаях, как изучение плавности хода (учет продольных ускорений водителя), тяговых качеств в связи с дополнительными сопротивлениями от колебаний, нагруженности трансмиссии (учет дополнительных нагрузок от неровностей дороги). Теория продольных колебаний автомобиля разработана несравненно меньше, чем, например, теория колебаний в вертикальной плоскости. Однако предпосылки для ее развитая заложены в ряде работ, в частности А. И. Гришкевича, учитывавшего влияние гармонического микропрофиля на тяговые качества автомобиля, в исследованиях дополнительных нагрузок в трансмиссии, обусловленных переменными вертикальными реакциями, вызванными случайным микропрофилем дороги [53, 102], при анализе продольных колебаний, в связи с плавностью хода автомобиля [12] и др. Во всех случаях речь идет об одних и тех же колебаниях. Но в зависимости от поставленной задачи вводятся те или иные допущения, отражающиеся и на эквивалентной системе. Рассмотрим предварительно качественную картину возникновения продольных колебаний, полагая, что автомобиль колеблется, двигаясь по дороге с ровной поверхностью. Продольные колебания вызываются переменными продольными силами и упругостью деталей и частей, нагружаемых этими силами. Ведущее колесо автомобиля связано через упругие валы и вращающиеся массы силовой передачи с двигателем. Поэтому к ведущему колесу подводится переменный момент, состоящий из момента, передаваемого от двигателя (его можно считать постоянным), и накладывающейся па него переменной составляющей (флуктуации, обусловленные колебаниями масс силовой передачи). Шина представляет собой упругую оболочку, способную деформироваться под действием всех сил и моментов, передающихся через колесо. Соответственно шина обладает жестко- стью при различных видах перемещений, из которых в данном случае наиболее важны вертикальные (радиальная жесткость) и угловые в продольной плоскости (тангенциальная жесткость). Радиальная и тангенциальная жесткости шины приводят к изменениям радиуса колеса, вызванным вертикальными колебаниями и ведущим моментом. Переменный момент, подводимый к колесу, и изменяющийся его радиус обусловливают переменную продольную силу (тангенциальную составляющую реакции между колесом и дорогой). Между ведомым колесом и дорогой также возникает переменная продольная сила, зависящая от упругости шины и свойств направляющего устройства подвески. У тягача появляется дополнительная продольная сила, передающаяся подрессоренной части от прицепа через опорносцепное (или сцепное) устройство. Эта сила может быть весьма большой, когда масса прицепа соизмерима или превышает массу тягача. Основным источником упругих (восстанавливающих) сил является упругость деталей, через которые подводится ведущий момент к колесу и передается продольная сила несущей системе автомобиля: упругость деталей силовой передачи, тангенциальная жесткость шины, упругая сила, зависящая от типа направляющего устройства подвески. Например, в однорычажной подвеске с перемещением колеса в продольной плоскости его вертикальные перемещения сопровождаются продольными перемещениями оси. Они вызывают вследствие тангенциальной жесткости шины переменный момент. Если направляющим устройством служит рессора, то на указанный момент накладываются составляющие, обусловленные жесткостью рессоры. Основную роль играет жесткость рессоры при передаче реактивного момента от колес несущей системе автомобиля (угловая жесткость при изгибе). Продольные колебания кузова являются источником одной составляющей продольных колебаний водителя или пассажира. Другая составляющая возникает из-за колебаний кузова в продольной плоскости. Эта составляющая тем значительнее, чем выше расположен водитель в кузове или кабине (грузовые и специальные автомобили). Попытки описать продольные колебания возможно точнее приводят к достаточно сложным уравнениям [53]. Ограничиваясь первым приближением, выведем уравнения движения, удобные для оценки тяговых качеств автомобиля на дороге с неровной поверхностью. Рассмотрим последовательно три случая: движение по ровной дороге без колебаний; движение по ровной дороге при свободных вертикальных колебаниях автомобиля; движение по неровной дороге. При равномерном движении по ровной горизонтальной дороге на ведомое и ведущее колеса и на автомобиль в целом действуют силы, показанные на рис. 26. Из теории автомобилей известно, что
где f = c/r коэффициент сопротивления качению; Мк — момент, подводимый к ведущему колесу. Проследим, что изменится, если автомобиль начнет совершать колебания, продолжая двигаться по ровной дороге, при постоянных величине мощности и частоте вращения. Для упрощения будем считать упругими только шины, характеризуя их радиальной сш и тангенциальной (угловой) са жесткостями. Радиусы колес станут переменными: rд≈ r - z. Вертикальные колебания будут сопровождаться изменением вертикальных, а также касательных реакций. В результате появятся переменные продольные силы, которые вызовут продольные колебания всего автомобиля (координата х) и угловые колебания колес (координата α k). Будем приближенно считать аk = x / rд. На угловые колебания колес будут влиять упругие моменты шин саа. Поступательное движение автомобиля можно рассматривать, как сложное, считая абсолютную скорость va суммой относительной х и переносной va, т. е. va = va + х, причем обычно х ≤ va. Полагая va = const, рассмотрим только относительное движе-
Разделим составляющие, из которых слагается кривая колебаний автомобиля, на собственно колебания и вибрации. Такое деление условно и может иметь различную основу. Придерживаясь данных физиологов, можно считать, что колебания воспринимаются человеческим организмом раздельно, а вибрации— слитно. Граница вибрационной чувствительности человека составляет около 18—23 гц. В соответствии с этим условно считаем вибрациями колебания с частотами свыше 17 гц (1000 колебании в минуту). Такое деление целесообразно, так как природа колебаний с частотами до 17 гц—одна (колебания кузова и колес на рессорах и шинах), а вибраций с частотами свыше 17 гц — другая (вибрации двигателя, трансмиссии, кузова и др.). Соответственно различны и способы борьбы с колебаниями и вибрациями. Существуют установившиеся, неустановившиеся и свободные колебания. Колебания первых двух видов происходят при воздействии внешних возмущающих сил, причем установившиеся колебания — это тот предел, к которому стремятся с течением времени неустновившиеся колебания. Необходимым условием для возникновения установившихся колебаний (называемых также вынужденными) является периодический характер возмущающей силы. Свободные колебания появляются, когда система предоставлена самой себе после нарушения равновесия вследствие внешнего воздействия. В отдельных случаях возможны автоколебания управляемых колес, т. е. установившиеся колебания, происходящие при наличии постоянного источника энергии, но без переменной внешней возмущающей силы. Автоколебания обусловлены способностью колебательной системы к самовозбуждению. Дадим более подробную характеристику основным видам колебаний автомобиля, выбрав в качестве примера ускорения кузова, найденные для простой колебательной системы, состоящей из кузова (подрессоренной части) и колеса (неподрессоренной части). Как было показано, можно описать ускорение кузова z следующим выражением:
Здесь первые два слагаемых с амплитудами zz, zkz и фазовыми углами φ z, φ kz обусловлены колебаниями с собственными частотами Ω и Ω k и затуханием h, hk, а последнее слагаемое — вынужденными колебаниями с частотой v возмущающей силы. Колебания, описываемые уравнением (123), соответствуют общему случаю неустановившихся колебаний при гармоническом (одночастотном) возбуждении.
Неустановившиеся колебания возникают, например, в процессе движения по неровности, показанной на рис. 29, а (профиль неровности заштрихован). До значения t = Tv ускорения кузова описываются уравнением (123). В качестве примера кроме кривой z ускорения кузова представлены также кривые перемещений кузова z и колеса ζ. Если возмущающая сила периодическая (например, движение происходит по дороге с правильной волнистой поверхностью), то по прошествии некоторого времени колебания с собственными частотами затухают, и остаются лишь колебания, обусловленные действием возмущающей силы,
Колебания, совершающиеся с частотой возмущающей силы и с постоянной амплитудой, являются установившимися вынужденными колебаниями. На рис. 29, б представлено изменение тех же величин, что и на рис. 29, а, для той же системы, но при периодических неровностях. К рассматриваемому моменту времени t = 4 сек собственные колебания исчезли и колебания стали установившимися. В момент съезда с неровности возмущающая сила прекращает свое действие, и начинаются свободные колебания, которые, например, для ускорения кузова описываются уравнением
Амплитуды ускорения zz° и zkz° определяются начальными данными, т. е. перемещениями и скоростями масс при t = Т v (в момент окончания действия возмущения). Наличие в уравнении (125) членов е-ht и е-hkt указывает на то, что свободные колебания при положительных значениях h и hK являются затухающими. При движении автомобиля по дороге с неровной поверхностью чаще всего встречаются неустановившиеся колебания с многочастотным возмущением. Установившиеся колебания возникают сравнительно редко. Во время движения автомобиля с постоянной скоростью (при неизменной частоте вращения двигателя и карданных валов) часто наблюдаются вынужденные колебания с вибрационными частотами. Свободные колебания возникают лишь после проезда отдельных выбоин или волн на шоссе с ровной поверхностью, при переезде валиков, проезде ступенек и т. п. При рассмотрении частных вопросов целесообразно несколько идеализировать характер колебаний автомобиля. Например, при малом затухании можно находить собственные частоты, считая, что колебания являются свободными и незатухающими. В ряде случаев случайное возмущение заменяют гармоническим. Это упрощает расчеты и натурные испытания, позволяет проверять качество подвески в наиболее неблагоприятных условиях, в том числе при резонансных режимах. Изучая резонансные режимы, можно считать далее колебания вынужденными (установившимися). Это удобно, так как расчет свободных и вынужденных колебаний сравнительно прост, и их легко воспроизвести при испытаниях. Доказано, что между установившимися и неустановившимися колебаниями существует однозначная связь Поэтому, зная поведение системы при колебаниях, которые редко возникают в действительности (а их расчет сравнительно несложен), можно оценить поведение системы при колебаниях другого вида. Исследование системы ЧАД является тем более достоверным, сложным и громоздким, чем точнее моделированы ее элементы Существуют следующие способы исследования системы ЧАД: 1) аналитический (расчетный); 2) моделированием на ЭВМ, 3) натурным экспериментом; 4) комбинированный. Эти способы различаются применяемыми техническими средствами п тем, какие элементы системы моделируют или оставляют реальными. Аналитический расчет выполняют при помощи простейших средств: логарифмической линейки, арифмометра, клавишных машин. Поэтому эквивалентная расчетная система имеет обычно одну — две степени свободы. Это предопределяет значительное упрощение исходной задачи. Аналитический расчет удобен для предварительных, сравнительных, контрольных и проектных расчетов. Моделирование на ЭВМ предполагает, что все элементы системы ЧАД характеризуются аналитическими или опытными зависимостями, пригодными для ввода в ЭВМ. Использование ЭВМ в принципе не накладывает границ на точность решения и сложность эквивалентной системы. Следует отметить, что практически все капитальные работы последних лет выполнены с использованием ЭВМ в большей или меньшей степени. Этот способ необходим при проверочных расчетах подвески. Натурный эксперимент проводят на реальном автомобиле с людьми. Исследование колебаний можно проводить на обычной дороге или дороге с искусственными неровностями, единичными или периодическими. Можно также испытывать неподвижный автомобиль на стенде, обеспечивающем единичное, периодическое или случайное возмущение колес одной или всех осей. Однако испытанию реального автомобиля сопутствуют трудности, связанные с изменением его параметров. При стендовых испытаниях сложно обеспечить случайное возмущение, передающееся всем колесам. Натурный эксперимент обязателен при завершении доводочных испытаний, при приемных и государственных испытаниях. Комбинированные способы исследования колебаний предполагают сочетание моделирования дороги и автомобиля с испытанием реальных людей, обычно в виде комбинации моделирования на ЭВМ с натурным испытанием человека. Этот путь породил ряд стендов (испытательных комплексов), удобных тем, что они позволяют справиться с недостаточной изученностью человека, затрудняющей его моделирование как колебательной системы или как оператора. Испытательные комплексы весьма удобны при разработке новых конструкций, существенно отличных от прототипов. Рассмотрим несколько подробнее сущность моделирования на ЭВМ применительно ко второму и к четвертому способам изучения системы ЧАД, используя материалы Д. А. Мочалова. Для изучения колебаний рассматриваемой системы можно использовать все виды ЭВМ, т. е. аналоговые машины (АВМ), цифровые (ЭЦВМ) и аналого-цифровые (гибридные) комплексы. Преимуществом АВМ являются наглядность получаемых результатов, относительная простота составления схем набора задачи, возможность моделирования в реальном масштабе времени, наивысшее быстродействие. Поясним принцип применения АВМ для анализа колебаний автомобиля, рассматриваемого как устойчивая, замкнутая динамическая система, переходный процесс в которой заканчивается, как только все силы (производные), возникшие под действием приложенного возмущения, обратятся в нуль. Основываясь на этом предположении, переписав дифференциальное уравнение a2z + a1z + a0z = b0q(t) в виде
можно автоматически получить его решение при помощи интегрирующих, суммирующих и множительных устройств (рис. 30). Вводя начальные условия z° и z° и замкнув цепь переключателем П, можно наблюдать изменение координаты z или ее производных на выходе соответствующего блока. Автоматические устройства (блоки) в рассматриваемой схеме могут быть различными (электрическими, гидравлическими, пневматическими и др.), однако чаще всего используют электронные операционные усилители с отрицательной обратной связью [46]. Обладая большим коэффициентом усиления в разомкнутом состоянии (4*103 — 106), такие усилители обеспечивают высокую точность выполнения необходимых математических операций при относительно длительных интервалах времени. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1517; Нарушение авторского права страницы

























 Представляет интерес поведение автомобиля при создавшемся на стенде воздействии возмущающего момента в поперечной плоскости.
Представляет интерес поведение автомобиля при создавшемся на стенде воздействии возмущающего момента в поперечной плоскости.










