
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
вопрос. Способы повышения плавности хода. ⇐ ПредыдущаяСтр 10 из 10
Ответ. Так как наряду с упругим элементом подвески на плавность хода оказывают влияние упругие свойства шины, го целесообразно устанавливать на автомобиль шины с меньшей жесткостью. На жесткость шины влияет ее конструкция, ширина профиля и давления воздуха в ней. Использование независимых подвесок по сравнению с зависимыми также повышает плавность хода, так как в этом случае существенно уменьшается галопирование. Другим важным условием обеспечения плавности хода является оптимальная расстановка колес по длине автомобиля. Каждая неровность дороги передает на автомобиль не один, а серию импульсов, воздействующих последовательно на каждое колесо. В зависимости от расстановки колес в одних и тех же дорожных условиях эти импульсы могут для одного автомобиля усиливать колебания, для другого ослаблять. Конструкция амортизаторов, их число и расположение оказывают влияние, как на плавность хода, так и на безопасность движения. Находящие в последнее время все большее применение газонаполненные амортизаторы обладают большей жесткостью по сравнению с гидравлическими при движении по дорогам с большим количеством неровностей, в то же время при движении по дорогам хорошего качества с большими скоростями они обеспечивают лучший контакт колеса с дорогой, а значит и устойчивость автомобиля. Конструктивные факторы однозначно определяют плавность хода только при вполне определенных внешних условиях и режимах работы автомобиля. К ним относятся:
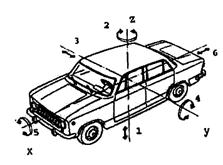
По дисциплине «Конструкция и эксплуатационные свойства ТиТТМО» Вопрос. Определение координаты центра упругости колебательной системы. Ответ. Кузов автомобиля имеет шесть степеней свободы и совершает весьма различные колебания (рис. 50.). Линейные перемещения вдоль осей х и у: Sх – подергивание, Sу – шатание, Sz – подпрыгивание, и угловые перемещения вокруг этих осей aх – покачивание, aу – галопирование, az – виляние.
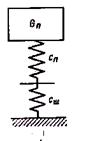
Рис. 50. Основные виды колебаний Приведенная жесткость подвески (сп) складывается из жесткости упругих элементов самой подвески (cр) и жесткости пневматических шин (cш) (рис. 51.).
Рис. 51. Определение приведенной жесткости подвески Под влиянием веса Gп упругая система деформируется на величину, равную сумме прогибов подвески и шины. Вместе с тем суммарный прогиб этой системы, который определяют по изменению положения оси колеса: f = Gп/спр, (193) где спр – приведенная жесткость подвески и шины, Н/м. Тогда
Решив полученное равенство получим:
спр = Жесткость передней или задней подвески современных автомобилей находится в пределах 20 - 60 кН/м, а жесткость шин – в пределах 200 - 450 кН/м. Для уменьшения вертикальных колебаний используют мягкую подвеску и устанавливают амортизаторы. Чтобы иметь представление о том, каким образом уменьшить галопирование, познакомимся с понятием о центре упругости системы /3/. Центром упругости системы называют точку, при приложении к которой внешней возмущающей силы возникает только линейное перемещение системы. Рассмотрим стержень, который опирается на упругие элементы подвески (рис. 52). Если сила Р приложена не к центру упругости, то происходит линейное и угловое перемещение стержня (положение 1). Если сила Р приложена к центру упругости, то происходит только линейное перемещение стержня(положение 2). В последнем случае f1 = f2, вследствие чего галопирование отсутствует.
Рис. 52 Определение положения центра упругости Определим величину х – расстояние от центра упругости до центра тяжести из условия равновесия стержня: å Мцт = R1a – Px – R2b = 0. Решив относительно х, получим: х = (R1a – R2b)/Р. Заменим реакции R1 и R2 произведениями R1 = с1f1 и R2 = с2f2, следовательно Р = R1 + R2, откуда: х = Но по условию f1 = f2, то: х = Применим данное выражение к колебаниям кузова, заменив подрессоренную массу кузова mк тремя массами, связанными между собой невесомым стержнем (рис. 53, б).
Рис. 53. Свободные колебания кузова Чтобы система соответствовала в динамическом отношении действительной массе подрессоренной части автомобиля, необходимо соблюдение следующих условий: 1.сумма всех масс системы должна быть равна подрессоренной массе автомобиля: m1 + m2 + m3 = mк. (200) 2. центр тяжести системы должен совпадать с центром тяжести кузова: m1ак = m2bк. (201) 3. момент инерции системы относительно горизонтальной оси у должен равняться моменту инерции подрессренной массе авиомобиля относительно той же оси: m1ак2 + m2bк2 = I = mкrк2, (202) где rк – радиус инерции подрессоренной массы автомобиля. Из уравнений (200) – (202) определим массы m1, m2, m3: m1 = (mкrк2)/(акL); m2 = (mкrк2)/(bкL); m3 = mк
Если стержень вывести из состояния равновесия, а затем отпустить, то он начнет колебаться (рис. 53, в). во время колебаний появляется сила инерции: Ри = m3j. Она создает момент относительно центра упругости: Ми = Рих = m3jх. (207) Ми = 0, если m3 = 0 или когда х = 0. Из уравнения следует, что m3 = 0, если rк2/(акbк) = 1, т. к. mк ¹ 0.для легковых автомобилей отношение rк2/(акbк) близко к единице, вследствии чего они имеют хорошую плавность хода. Если плечо х = 0 и центр тяжести совпадает с центром упругости, то: х = тогда с1ак = с2bк или с1/с2 = bк/ак. По дисциплине «Конструкция и эксплуатационные свойства ТиТТМО» Вопрос. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 2594; Нарушение авторского права страницы
 . (194)
. (194) . (195)
. (195)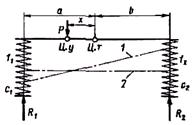

 . (199)
. (199)
 .
. = 0. (208)
= 0. (208)