
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Т а б л и ц а 2.5.1. Основные типы триггеров
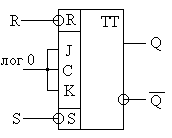
2. Прочерк в таблице переходов означает, что на данный информационный вход может быть подан произвольный логический сигнал (либо «0», либо «1»). Обычно все типы триггеров дополнительно снабжаются асинхронными входами R и S, которые воздействуют непосредственно на элемент памяти. Эти входы позволяют устанавливать или сбрасывать триггер вне зависимости от остальных информационных сигналов. На рис. 2.5.4 приведены логическая схема и обозначение синхронного RS-триггера с асинхронными установочными входами.
Т а б л и ц а 2.5.2. Варианты использования JK-триггера
Из приведенных в таблице 2.5.1 триггеров JK-триггер называют универсальным, так как на его основе можно реализовать алгоритмы работы других типов триггеров (табл. 2.5.2). При этом, кроме D-триггера, для получения остальных типов триггеров на входы JK-триггера необходимо подавать соответствующие комбинации входных сигналов. Следует отметить, что, при подаче одновременно активных сигналов на входы J и K, JK-триггер начинает работать, как счетный. Это следствие наличия в его внутренней структуре дополнительных цепей обратной связи. 2.5.3. Конечные автоматы. Ранее отмечалось, что если блок обратной связи обобщенной структурной схемы (см. рис. 2.5.1) последовательностного устройства содержит элементы памяти, например триггеры, то полученная структура является конечным автоматом. Термин «конечный» означает, что число выходных сигналов, и, следовательно, состояний автомата, является конечным. Введем понятие состояние автомата. Это понятие уже вводилось ранее для одиночного триггера, и под ним понимался выходной сигнал триггера. В общем случае, блок обратной связи автомата может содержать несколько триггеров. Поэтому под состоянием автомата понимается сигнал, формируемый на выходе блока обратной связи. С учетом этого, обобщенную структурную схему конечного автомата можно представить в виде двух подсистем: комбинационной и триггерной или подсистемы памяти (рис. 2.5.5]. В отличие от ранее рассмотренной, приведенная структура предполагает наличие еще одного сигнала. Это сигнал синхронизации С, используемый для инициализации переключения элементов памяти (триггеров) подсистемы памяти.
Таким образом, изменение выходного сигнала автомата Z [m -1…0] возможно в двух случаях: при изменении входного сигнала  и при изменении состояния его подсистемы памяти S [p -1…0], происходящего в момент переключения триггеров его подсистемы памяти. Последнее определяется сигналом синхронизации С. и при изменении состояния его подсистемы памяти S [p -1…0], происходящего в момент переключения триггеров его подсистемы памяти. Последнее определяется сигналом синхронизации С.
2.5.4. Описание поведения цифрового автомата. Наиболее часто для описания алгоритма работы цифрового автомата используют либо граф переходов, либо таблицу состояний. Очевидно, что обе формы легко преобразуются одна в другую. Граф переходов представляет графическую интерпретацию алгоритма работы цифрового автомата. Он наиболее удобен для начальной формализации алгоритма его работы. При построении графа переходов каждому состоянию автомата ставится в соответствие некоторая вершина графа, а переход из одного его состояния в другое соответствует направленному ребру, соединяющему начальное и конечное состояния. Причем каждое ребро взвешено, т.е. над ним указывается дробь, числитель которой указывает значение входного сигнала, под действием которого осуществляется указанный переход, а знаменатель соответствует текущему значению выходного сигнала автомата Z[m–1…0]. Таблица состояний включает G + 1 столбец и 2.5.5. Алгоритм синтеза цифрового автомата. 1. Исходя из условий функционирования, определяют число необходимых состояний и требуемый объем памяти цифрового автомата. Число необходимых для реализации состояний
где функция CEIL означает округление до ближайшего большего целого. 2. Выполняют формальное описание алгоритма работы автомата. 3. Выбирают тип триггера для реализации подсистемы памяти. 4. Используя формальное описание алгоритма работы автомата и таблицу переходов выбранного типа триггеров, составляют расширенную таблицу истинности, характеризующую работу комбинационной подсистемы автомата. Число строк этой таблицы равно максимальному числу входных сигналов, действующих на входе комбинационной подсистемы. В столбцах таблицы записывается следующая информация: Х[n-1…0] – входной сигнал, Sn [q-1….0] – текущее состояние автомата, Sn+1[q-1…0] – последующее состояние автомата, Y[k-1…0] – cигнал ПОС, Z[m-1…0] – выходной сигнал автомата. 5. Используя расширенную таблицу истинности, минимизируют функции алгебры логики (ФАЛ), описывающие работу комбинационной подсистемы автомата; 6. Используя полученные ФАЛ, синтезируют схему цифрового автомата. Проиллюстрируем описание алгоритма работы автомата на примере. Пример 2.5.1. Спроектировать устройство, формирующее на выходе следующие последовательности выходных кодов: · при входном сигнале X = 1: 000, 001, 010, 100; · при входном сигнале Х = 0: 100, 010, 001, 000. Изменение входного сигнала должно приводить к изменению выходного кода в соответствие с заданными последовательностями сигналов. Причем это изменение должно происходить по фронту импульса внешнего сигнала синхронизации. 1. Из заданного алгоритма работы следует, что при одном значении входного сигнала Х на выходе автомата может формироваться 4 кода. Следовательно, число необходимых состояний автомата 2. Синтезируем граф переходов, описывающий заданный алгоритм работы устройства. Обозначим состояния автомата окружностями и обозначим их как S0, S1, S2 и S3 (рис. 2.5.6). Используя граф переходов, составим таблицу состояний автомата. В таблице состояний обозначено S0 = 00, S1 = 01, S2 = 10, S3 = 11 (табл. 2.5.1). 3. Для реализации триггерной подсистемы можно использовать любой тип синхронного триггера, изменяющего своё состояние по фронту импульса сигнала синхронизации. Используемый тип триггера определяет схему комбинационной подсистемы автомата. Можно сформулировать некоторые общие закономерности выбора типа используемого триггера. При выборе триггера, управляемого двумя информационными сигналами (RS- и JK-триггеры) увеличивается разрядность сигнала ПОС, однако, как правило, упрощается схема комбинационной подсистемы.
4. Составим расширенную таблицу истинности (табл. 2.5.3). Т а б л и ц а 2.5.3. Расширенная таблица истинности Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 825; Нарушение авторского права страницы










 строк, где G – число различных комбинаций входных сигналов Х[n-1…0], которые могут присутствовать на входе автомата. В первом столбце перечисляются все возможные состояния автомата (состояния Sn). Остальные столбцы соответствуют возможным входным сигналам. На пересечении i-ой строки, соответствующей текущему состоянию автомата (соcтояние Si) и j-го столбца, соответствующего текущему значению входного сигнала (сигнал Х(j)) записывается дробь, числитель которой показывает следующее состояние автомата (Sn+1), а знаменатель – текущее значение выходного сигнала Z. Различные способы описания алгоритма работы автомата приведены в примере 2.5.1
строк, где G – число различных комбинаций входных сигналов Х[n-1…0], которые могут присутствовать на входе автомата. В первом столбце перечисляются все возможные состояния автомата (состояния Sn). Остальные столбцы соответствуют возможным входным сигналам. На пересечении i-ой строки, соответствующей текущему состоянию автомата (соcтояние Si) и j-го столбца, соответствующего текущему значению входного сигнала (сигнал Х(j)) записывается дробь, числитель которой показывает следующее состояние автомата (Sn+1), а знаменатель – текущее значение выходного сигнала Z. Различные способы описания алгоритма работы автомата приведены в примере 2.5.1 определяется, как наибольшее значение выходных кодов устройства, формируемых при одном значении входного сигнала. Объем памяти триггерной подсистемы
определяется, как наибольшее значение выходных кодов устройства, формируемых при одном значении входного сигнала. Объем памяти триггерной подсистемы  определяется из условия, что n разрядный двоичный код может принимать
определяется из условия, что n разрядный двоичный код может принимать  различных значений. Тогда требуемый объем памяти, т.е. число необходимых триггеров подсистемы памяти, определяется из условия:
различных значений. Тогда требуемый объем памяти, т.е. число необходимых триггеров подсистемы памяти, определяется из условия: 
 . Для реализации такого числа состояний достаточно двух триггеров
. Для реализации такого числа состояний достаточно двух триггеров  .
.