
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Ориентационное приспособление
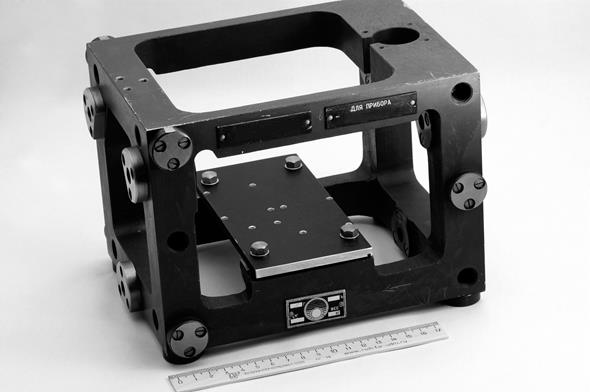
Ориентационное приспособление, или, как его чаще называют, куб с ортогональными гранями представляет собой полую внутри конструкцию с взаимно ортогональными гранями (рис. 4.2). Каждая грань куба материализована в виде 3…4 отполированных стальных «пятачков», которые также называют платиками. Именно на эти «пятачки» устанавливается измерительный куб на рабочую поверхность горизонтируемого основания или поворотного скоростного стола. С кубом жестко связана металлическая пластина с закрепленными на ней объектами испытаний: платой трехосного акселерометра, платой двухосного ДУС и платой ИИБ (рис. 4.3). Установка куба разными гранями на предварительно выставленное в горизонт основание позволяет создать тестовые воздействия: ускорение силы тяжести и угловую скорость вращения, - гарантированно в ортогональных направлениях. Для удобства в работе грани куба пронумерованы от 1 до 6. Верхнему положению грани с номером 1 отвечает направление оси X объекта испытаний вверх. Верхнему положению грани с номером 2 отвечает направление оси X объекта испытаний вниз. Верхнему положению грани с номером 3 отвечает направление оси Y объекта испытаний вверх.
Рис. 4.2. Ориентационное приспособление
Рис. 4.3. Ориентационное приспособление с объектами испытаний
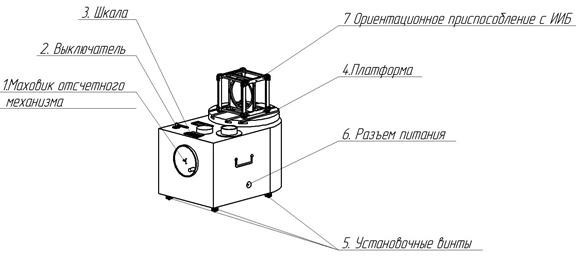
Верхнему положению грани с номером 4 отвечает направление оси Y объекта испытаний вниз. Верхнему положению грани с номером 5 отвечает направление оси Z объекта испытаний вверх. Верхнему положению грани с номером 6 отвечает направление оси Z объекта испытаний вниз. В связи с тем, что микромеханические инерциальные датчики обычно не чувствуют скорость вращения Земли, азимутальное положение ориентационного приспособления не имеет никакого значения. Поворотный скоростной стол с вертикальной осью вращения Поворотный скоростной стол с вертикальной осью вращения используется в лабораторных работах с двухосным ДУС и инерциальным измерительным блоком для задания тестовых угловых скоростей. В качестве поворотного скоростного стола используется малогабаритная поворотная установка МПУ-1 (рис. 4.4), которая имеет следующие характеристики [19]: - диапазон угловых скоростей платформы от 0, 03º /с до 150º /с; - неравномерность угловой скорости платформы: -- 2% для скоростей от 0, 03º /с до 0, 05º /с; -- 1, 5% для скоростей свыше 0, 05º /с до 0, 3º /с; -- 1% для скоростей свыше 0, 3º /с до 150º /с; - неточность установки скоростей по лимбу отсчетного механизма: -- 5% для скоростей от 0, 03º /с до 0, 05º /с; -- 3% для скоростей от 0, 05º /с до 0, 3º /с; -- 1% для скоростей свыше 0, 3º /с до 150º /с; - несовпадение правых и левых угловых скоростей платформы: -- 1, 5% для скоростей от 0, 03º /с до 0, 1º /с; -- 1% для скоростей от 0, 1º /с до 150º /с; - регулировка скоростей плавная; - максимально допустимая нагрузка на платформу 8кг; - температурный интервал работы 15º С…35º С; - количество токоведущих шин коллектора 18; - питание ~50Гц 220В. Питание установки МПУ-1 (рис. 4.4) от сети ~50Гц 220В осуществляется посредством шнура через разъем питания 6. Выставка оси вращения платформы 4 установки МПУ-1 по направлению отвесной линии осуществляется четырьмя установочными винтами 5. Предварительная установка требуемой скорости вращения производится маховиком отсчетного механизма 1 по шкале 3.
Рис. 4.4. Малогабаритная поворотная установка МПУ-1
Трехпозиционный выключатель 2 запускает правое (против часовой стрелки) или левое (по часовой стрелке) вращение платформы. На верхней поверхности платформы закрепляется в нужных положениях ориентационное приспособление с объектом испытаний. Отсчет угла поворота платформы производится либо по шкале, выгравированной на наружной цилиндрической поверхности платформы, либо по шкале на корпусе установки.
Секундомер Как указано выше, установка МПУ-1 обеспечивает неравномерность угловой скорости платформы, неточность установки скоростей по лимбу отсчетного механизма и несовпадение правых и левых угловых скоростей платформы с погрешностями на уровне единиц процентов каждая. С целью уменьшения погрешностей задания тестовых угловых скоростей при проведении лабораторных работ в ряде случаев производится прямое измерение угла по лимбу платформы и прямое измерение времени разворота платформы на этот угол по секундомеру. Расчет средней скорости вращения платформы осуществляется по формуле
где
Для уменьшения погрешностей в определении средней скорости вращения платформы рекомендуется назначать время измерений не менее 30…40с. Для эффективного осреднения кинематических погрешностей установки МПУ-1 рекомендуется назначать угол поворота платформы В качестве секундомера рекомендуется использовать соответствующую функцию мобильного телефона. Цифровой мультиметр Цифровой мультиметрявляется основным средством измерения в лабораторных работах с трехосным акселерометром и двухосным ДУС. По совокупности многих качеств выбран цифровой мультиметр APPA-305 (рис. 4.5) фирмы APPA TECHNOLOGY CORPORATION [20]. Этот мультиметр включен в Государственный реестр средств измерений РФ за №20088-05. В данной лабораторной работе мультиметр используется в режиме измерения постоянного напряжения. Входное сопротивление мультиметра составляет 10МОм, скорость измерения – 2изм/сек при 5-разрядной индикации результатов измерений или 4изм/сек при 4-разрядной индикации. Измерения следует начинать не ранее 60сек после включения мультиметра. Во всех режимах работы предел измерения выбирает сам мультиметр автоматически, начиная с верхнего предела измерения. Выражение для определения пределов допускаемой основной абсолютной погрешности на пределе измерения постоянного напряжения 40мВ определяется формулой
где
Пример 1. При измерении постоянного напряжения мультиметром APPA305 на пределе измерения 40мВ получено значение 20мВ. По формуле (4.2) вычислим предел допускаемой основной погрешности, где
Относительная погрешность измерения составит
Пример завершен.
Рис. 4.5. Цифровой мультиметр APPA-305
Выражение для определения пределов допускаемой основной абсолютной погрешности на всех остальных пределах измерения постоянного напряжения определяется формулой
где Пример 2. При измерении постоянного напряжения мультиметром APPA305 на пределе измерения 4В получено значение 2В. По формуле (4.3) вычислим предел допускаемой основной погрешности, где
Относительная погрешность измерения составит
Пример завершен. Предел допускаемой основной абсолютной погрешности нормируется при следующих условиях эксплуатации: - температура окружающей среды (23±5)º C; - относительная влажность (60±20)%; - атмосферное давление (750±30)мм рт.ст.; - 5-разрядная индикация цифровой шкалы; - номинальное значение напряжения питания (отсутствует индикация разряда батареи). Если органы управления мультиметра в течение некоторого заданного интервала времени неактивны, то питание мультиметра автоматически выключается. Для повторного включения мультиметра необходимо нажать любую функциональную клавишу. Сохранена заводская установка интервала отключения питания 30мин. Последовательность действий при выполнении лабораторных работ исключает возможность неактивных действий органов управления мультиметра более 30мин. Связь мультиметра с объектом исследования осуществляется двумя измерительными проводами с зажимами типа «крокодил», входящими в комплект поставки мультиметра. Связь мультиметра с персональным компьютером через USB-порт осуществляет входящий в комплект поставки мультиметра кабель с оптоэлектронной развязкой. Взаимодействие мультиметра с персональным компьютером с целью регистрации результатов измерений осуществляется в следующей последовательности. Подключите измерительные провода мультиметра к участку электрической цепи для проведения требуемых измерений. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 522; Нарушение авторского права страницы

 , (4.1)
, (4.1) - средняя угловая скорость платформы, º ⁄ с;
- средняя угловая скорость платформы, º ⁄ с;  - угол поворота платформы, º;
- угол поворота платформы, º;  - время поворота платформы на указанный угол, с.
- время поворота платформы на указанный угол, с. , (4.2)
, (4.2) - предел допускаемой основной абсолютной погрешности;
- предел допускаемой основной абсолютной погрешности;  - измеренное значение;
- измеренное значение;  - значение единицы младшего разряда (на данном пределе измерения
- значение единицы младшего разряда (на данном пределе измерения  мкВ).
мкВ). 20мВ,
20мВ,  0, 001мВ
0, 001мВ мВ.
мВ.

 , (4.3)
, (4.3) мкВ, на пределе измерения 4В
мкВ, на пределе измерения 4В  мкВ).
мкВ). В.
В.