|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Глава 3. МИКРОМЕХАНИЧЕСКИЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
Краткие теоретические сведения Термин инерциальный измерительный блок (ИИБ) (от англ. Inertial Measurement Unit (IMU)) введен для обозначения устройства, измеряющего параметры движения основания, на котором он установлен. Для систем, построенных на базе гиростабилизированной платформы, под понятие ИИБ подпадает гиростабилизированная платформа вместе с сопутствующей сервисной электроникой. Для бесплатформенных гироскопических систем под понятие ИИБ подпадает любое устройство, содержащее набор инерциальных датчиков (гироскопов и акселерометров) и сопутствующую сервисную электронику. Так, например, ИИБ, содержащий стандартный набор из трех акселерометров и трех ДУСов, может быть как гироскопической основой бесплатформенной инерциальной навигационной системы, так и составной частью автопилота в качестве блока демпфирующих гироскопов и датчиков перегрузки. 3.1.2. Обычно ИИБ характеризуются следующим набором параметров и характеристик: - назначение и область применения; - конструктивная схема ИИБ; - количество измерительных осей инерциальных датчиков; - конструктивная схема используемых гироскопов и акселерометров; - форма представления выходной информации: в аналоговом виде (постоянное напряжение или постоянный ток) или в цифровом коде в одном из стандартных интерфейсов; - тип и основные технические характеристики процессора (микропроцессора); - частота опроса инерциальных датчиков; - протокол обмена; - режимы работы; - напряжение (или напряжения) питания и потребляемый ток (токи) в указанных режимах работы; - время готовности; - предельные значения величин, измеряемых инерциальными датчиками; - вид выходной характеристики инерциальных датчиков; - масштабные коэффициенты и/или цены единиц младшего разряда каждой измеряемой величины; - смещения нуля – значения аргумента выходной характеристики каждого датчика, при котором ее график пересекает ось абсцисс; - погрешность каждого датчика в данном запуске и стабильность (воспроизводимость) погрешности от запуска к запуску; - нелинейности выходной характеристики инерциальных датчиков в рабочем диапазоне; - тренды инерциальных датчиков; - случайные погрешности инерциальных датчиков; - частотные диапазоны измеряемых величин (полосы пропускания инерциальных датчиков); - погрешности выставки осей чувствительности инерциальных датчиков к посадочным поверхностям на корпусе ИИБ; - влияние внешних воздействий (времени, температуры, напряжения питания, линейных ускорений, ударов, вибрации, постоянного и переменного внешнего магнитного поля и т.д.) на указанные выше характеристики; - показатели надежности; - масса; - габариты; - цена. 3.1.3. Модель погрешностей ИИБ [8]. Измерения ИИБ являются комбинацией измерений триады акселерометров (1.12) и триады ДУС (2.9), изначально представляющих собой сигналы напряжения постоянного тока. Далее выходные сигналы инерциальных датчиков поступают на входы шести N-разрядных аналого-цифровых преобразователей (АЦП). На выходе каждого из шести N-разрядных АЦП выходная информация инерциальных датчиков представляется в виде одного из
где
Величина, обратная периоду опроса, В нашем случае аналого-цифровое преобразование выходных сигналов акселерометров и ДУС осуществляется по принципу взятия целой части числа [13], полученного в результате деления выходного напряжения каждого датчика на цену единицы младшего разряда соответствующего АЦП. Выходной информацией ИИБ являются целочисленные коды в диапазоне от 0 до
(3.2)
где
Все остальные обозначения совпадают с указанными выше обозначениями в главах 1 и 2. Величины Указанное выше аналого-цифровое преобразование вызывает дополнительную погрешность квантования со средним значением, равным нулю, и стандартным отклонением (среднеквадратической ошибкой), равной 3.1.4. Калибровка ИИБ или определение параметров ИИБ в силу приведенной модели погрешностей (3.1), (3.2) осуществляется по методикам, изложенным в главе 1 для триады акселерометров и в главе 2 для триады ДУС. Заявленная изготовителем цена единицы младшего разряда каждого ДУС из ИИБ составляет 0, 977º /сек или 3517º /ч. Таким образом, ДУС ИИБ не чувствуют угловую скорость вращения Земли. Это соображение позволяет в дальнейшем, как и ранее в главе 2 при калибровке ДУС, среди тестовых воздействий не учитывать скорость вращения Земли. Полученные выше в главе 1 формулы для вычисления параметров триады акселерометров (1.32)…(1.35), (1.37), (1.39)…(1.42), (1.44), (1.45), (1.47)…(1.51) и в главе 2 формулы для вычисления параметров триады ДУС (2.46)…(2.72) пригодны и для ИИБ. Разница состоит в том, что в правых частях указанных формул вместо осредненных значений выходных напряжений акселерометра и ДУС должны фигурировать осредненные значения выходных кодов каналов ИИБ. Сводка формул для определения калибровочных констант триады акселерометров ИИБ в силу модели погрешностей (3.1): - выражения для вычисления поправок к масштабным коэффициентам
- выражения для вычисления погрешностей выставки оси чувствительности акселерометра X
- выражения для вычисления погрешностей выставки оси чувствительности акселерометра Y
- выражения для вычисления погрешностей выставки оси чувствительности акселерометра Z
- выражения для вычисления смещения нуля акселерометра X
- выражения для вычисления смещения нуля акселерометра Y
- выражения для вычисления смещения нуля акселерометра Z
где
При использовании ориентационного приспособления с пятью, а не шестью, рабочими гранями в отсутствие достоверных данных
где Сводка формул для определения калибровочных констант ДУС ИИБ в силу модели погрешностей (3.2) может быть получена из выражений (2.46)…(2.72): - выражения для вычисления поправок к масштабным коэффициентам
- выражения для вычисления погрешностей выставки оси чувствительности ДУС X
- выражения для вычисления погрешностей выставки оси чувствительности ДУС Y
- выражения для вычисления погрешностей выставки оси чувствительности ДУС Z
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУСа X
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС Y
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС Z
- выражения для вычисления смещения нуля ДУС X
- выражения для вычисления смещения нуля ДУС Y
- выражения для вычисления смещения нуля ДУС Z
где
Объект исследования
Объектом исследования является инерциальный измерительный блок (ИИБ) Atomic IMU 6 DOF (6 Degrees of Freedom Atomic Inertial Measurement Unit SEN-09812 фирмы Sparkfun Electronics, Inc) [16]. Внешний вид ИИБ в состоянии поставки представлен на рис. 3.1.
Рис. 3.1. Внешний вид ИИБ Atomic IMU 6 DOF в состоянии поставки
ИИБ Atomic IMU 6 DOF обеспечивает измерение по трем взаимно ортогональным осям трех составляющих кажущегося ускорения и трех составляющих угловой скорости, преобразование этих данных в 10-разрядный двоичный код и передачу кодов либо по проводному UART интерфейсу, либо без проводов по радиоканалу с дополнительным XBee приемо-передатчиком. В данном лабораторном практикуме задействована беспроводная конфигурация с использованием радиоканала для передачи данных. ИИБ Atomic IMU 6 DOF использует следующие датчики: - один микромеханический трехкомпонентный акселерометр MMA7361L с переключаемым диапазоном ±1, 5g или ±6g [11]; - три микромеханических одноосных датчика угловой скорости LISY300AL с диапазоном ±300˚ /c [17]. Микромеханический трехосный акселерометр MMA7361L детально описан в главе 1. Сводка механических характеристик микромеханического одноосного ДУС LISY300AL дана в таблице 3.1. Таблица 3.1. Механические характеристики при напряжении питания 3, 3В, температуре окружающей среды 25º C за исключением указанного в примечаниях (прим. 1)
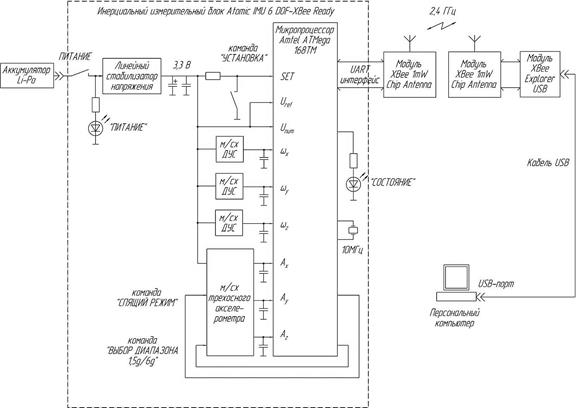
Примечания: 1. Продукция на производстве калибруется при 3, 3В. При возможном изменении напряжения питания параметры указаны в данной таблице. 2. Типичные значения не гарантируются. 3. Продукция способна чувствовать угловую скорость от постоянной величины до назначенной полосы пропускания. 4. Гарантируется конструкцией. 5. Выбранный пользователем внешний конденсатор 6. «Изменение напряжения на выходе при самотестировании» определяется как разность Vout(при Vst=лог.1)-Vout(при Vst=лог.0). Акселерометр и гироскопы применены в соответствии с рекомендациями изготовителей, предусматривающих наличие развязок по питанию и фильтров на выходах датчиков. И акселерометр, и гироскопы имеют внутреннюю температурную компенсацию. Основные параметры ИИБ: - напряжение питания – постоянное напряжение в диапазоне от 3, 4В до 10В; - потребляемый ток – 24мА при наличии проводного интерфейса (75мА при наличии XBee приемо-передатчика); - габариты 47х37х25мм; - гироскоп LYSI300AL – назначенная аппаратно полоса пропускания составляет 88Гц, номинальная цена единицы младшего разряда 0, 977(˚ /с)/ед.мл.разр.; - акселерометр MMA7361L – назначенная аппаратно полоса пропускания составляет по осям X и Y 350Гц, по оси Z 150Гц; номинальная цена единицы младшего разряда 0, 00403g/ед.мл.разр. при диапазоне ±1, 5g и 0, 0161g/ед.мл.разр. при диапазоне ±6g. Расположение осей чувствительности ИИБ дано в виде пиктограммы на верхней поверхности печатной платы: - ось X параллельна короткой стороне печатной платы; - ось Y параллельна длинной стороне печатной платы; - ось Z перпендикулярна плоскости печатной платы. Упрощенная блок-схема ИИБ представлена на рис 3.2 [8]. Питание ИИБ осуществляется от внешнего литий полимерного (Li-Po) аккумулятора номинальной емкостью 500мА·ч с номинальным напряжением от 4, 2В до 3, 7В. Аккумулятор подключается к линейному стабилизатору напряжения 3, 3В с помощью разъема и выключателя ПИТАНИЕ (POWER). О наличии питания сигнализирует светодиод ПИТАНИЕ красного цвета. Стабилизированное напряжение с выхода линейного стабилизатора поступает на микропроцессор, три микросхемы ДУС, одну микросхему трехкомпонентного акселерометра и другие устройства инерциального измерительного блока. Аналоговые сигналы инерциальных датчиков в виде положительного напряжения постоянного тока поступают на входы шести 10-разрядных АЦП микропроцессора. В качестве опорного напряжения АЦП микропроцессора используется то же напряжение 3, 3В с выхода линейного стабилизатора. Работа микропроцессора тактируется кварцевым резонатором с частотой 10МГц.
Рис. 3.2. Упрощенная блок-схема ИИБ Atomic IMU 6 DOF
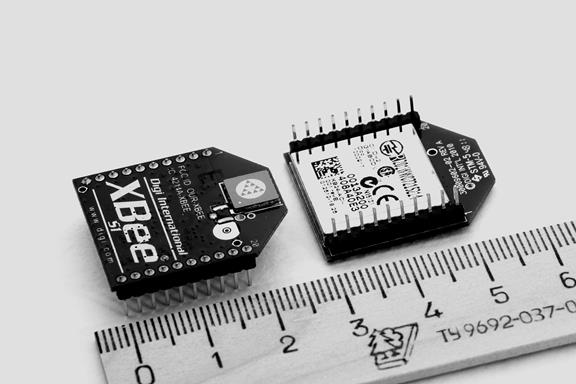
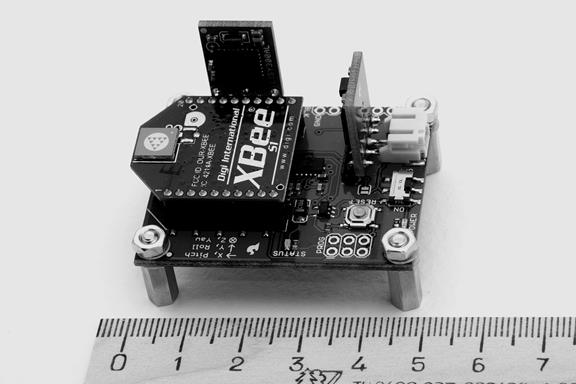
Цифровая информация инерциальных датчиков в виде UART интерфейса поступает на приемо-передающий модуль (XBee 1mW Chip Antenna series 1 WRL-08664) (рис. 3.3). Приемо-передающий модуль устанавливается непосредственно на ИИБ в двухрядный штыревой разъем (рис. 3.4). Аналогичный приемо-передающий модуль устанавливается в двухрядный штыревой разъем в устройство XBee Explorer USB (рис. 3.5), которое осуществляет прием, преобразование поступающей информации и ввод данных в персональный компьютер по стандартному кабелю через USB-порт (рис. 3.6).
Рис. 3.3. Приемо-передающий модуль XBee 1mW Chip Antenna series 1 WRL-08664: слева – вид сверху, справа – вид снизу.
Рис. 3.4. ИИБ с установленным приемо-передающим модулем
Рис. 3.5. Устройство связи с персональным компьютером XBee Explorer USB в состоянии поставки
Рис. 3.6. Устройство связи с персональным компьютером XBee Explorer USB вместе с приемо-передающим модулем и кабелем USB
Радиоканал связи ИИБ с компьютером обеспечивает устойчивую радиосвязь на частоте 2, 4ГГц в одной комнате или вне помещения на удалении до 100м и является двунаправленным: - от персонального компьютера в ИИБ поступают команды управления и данные начальной установки; - от ИИБ в персональный компьютер поступает информация от инерциальных датчиков. Мощность приемо-передатчиков 1мВт безопасна для работающих с ними людей. В ИИБ применен микропроцессор Atmel ATMega168TM, имеющий следующие ресурсы: - флеш-память 16Кб; - СППЗУ 0, 5Кб; - ОЗУ 1024бит; - максимальное значение тактовой частоты 20МГц; - ввод/вывод (I/O) сигналов логического уровня – 23 канала; - количество 10-битных АЦП – 8 каналов; - выход ШИМ – 3 канала; - таймер 16 бит – 1 канал; - таймер 8 бит – 2 канала; - интерфейсы RTC, SPI, UART, TWI, ISP. Аппаратная начальная инициализация микропроцессора может быть осуществлена кнопкой УСТАНОВКА. О работе микропроцессора в разных режимах сигнализирует светодиод СОСТОЯНИЕ. Перед проведением работ с ИИБ на персональном компьютере должна быть установлена терминальная программа. Терминальная программа взаимодействует с программным обеспечением ИИБ, которое поставляется в загруженном виде в микропроцессор вместе с ИИБ. Терминальная программа позволяет осуществить настройку параметров обмена по радиоканалу. Стандартные параметры настройки: скорость обмена 115200бод, формат - 8 бит, проверка на четность – N, стоповых битов – 1, управление потоком – N. После установки параметров обмена при нажатии на клавиатуре клавиши < Пробел> на дисплей персонального компьютера выводится экранное меню 6 DOF Atomic IMU: Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1287; Нарушение авторского права страницы
 целых чисел в диапазоне от 0 до
целых чисел в диапазоне от 0 до  в дискретные моменты времени
в дискретные моменты времени
 - начальный момент времени, с;
- начальный момент времени, с;  - текущий номер отсчета, б/р;
- текущий номер отсчета, б/р;  - период опроса (период квантования или период дискретизации), с;
- период опроса (период квантования или период дискретизации), с;  - момент выработки
- момент выработки  называется частотой опроса (частотой квантования или частотой дискретизации) [13].
называется частотой опроса (частотой квантования или частотой дискретизации) [13].  для каналов ускорений и на величины
для каналов ускорений и на величины  для каналов ДУС. Измерения ИИБ с цифровым выходом можно представить в виде
для каналов ДУС. Измерения ИИБ с цифровым выходом можно представить в виде (3.1)
(3.1)
 - функция взятия целой части числа, заключенного в прямые скобки;
- функция взятия целой части числа, заключенного в прямые скобки;  - выходные коды каналов акселерометра ИИБ, б/р;
- выходные коды каналов акселерометра ИИБ, б/р;  - цена единицы младшего разряда соответствующего канала АЦП акселерометра ИИБ, мВ/ед.мл.разр;
- цена единицы младшего разряда соответствующего канала АЦП акселерометра ИИБ, мВ/ед.мл.разр;  - выходные коды каналов ДУС ИИБ, б/р;
- выходные коды каналов ДУС ИИБ, б/р;  - цена единицы младшего разряда соответствующего канала АЦП ДУС ИИБ, мВ/ед.мл.разр;
- цена единицы младшего разряда соответствующего канала АЦП ДУС ИИБ, мВ/ед.мл.разр;  - смещения выходной характеристики каналов акселерометров, б/р;
- смещения выходной характеристики каналов акселерометров, б/р;  и
и  называются соответственно номинальными ценами единицы младшего разряда каналов акселерометров и ДУС ИИБ и характеризуют такое изменение входной величины (линейного ускорения для акселерометров и угловой скорости для ДУС), которое приводит к изменению выходного кода канала на единицу младшего разряда. Цена единицы младшего разряда любого канала ИИБ – это разрешающая способность канала. Разрешающая способность – это минимальное приращение входного воздействия, при котором на выходе появляется различимое приращение выходного кода. Меньшие значения измеряемой величины канал просто не способен ощутить.
называются соответственно номинальными ценами единицы младшего разряда каналов акселерометров и ДУС ИИБ и характеризуют такое изменение входной величины (линейного ускорения для акселерометров и угловой скорости для ДУС), которое приводит к изменению выходного кода канала на единицу младшего разряда. Цена единицы младшего разряда любого канала ИИБ – это разрешающая способность канала. Разрешающая способность – это минимальное приращение входного воздействия, при котором на выходе появляется различимое приращение выходного кода. Меньшие значения измеряемой величины канал просто не способен ощутить. единицы младшего разряда [14].
единицы младшего разряда [14].  (3.3)
(3.3) (3.4)
(3.4) (3.5)
(3.5) (3.6)
(3.6) (3.7)
(3.7) (3.8)
(3.8) (3.9)
(3.9) (3.10)
(3.10) (3.11)
(3.11) (3.12)
(3.12) (3.13)
(3.13) (3.14)
(3.14) (3.15)
(3.15) (3.16)
(3.16) (3.17)
(3.17) (3.18)
(3.18) (3.19)
(3.19) (3.20)
(3.20) ,
,  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра X ИИБ в соответствующей ориентации;
- средние значения показаний акселерометра X ИИБ в соответствующей ориентации;  ,
,  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра Y ИИБ в соответствующей ориентации;
- средние значения показаний акселерометра Y ИИБ в соответствующей ориентации;  ,
,  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра Z ИИБ в соответствующей ориентации.
- средние значения показаний акселерометра Z ИИБ в соответствующей ориентации. и
и  формулы для определения погрешности выставки
формулы для определения погрешности выставки  оси чувствительности акселерометра X (1.50) и для определения погрешности выставки
оси чувствительности акселерометра X (1.50) и для определения погрешности выставки  оси чувствительности акселерометра Y (1.51) примут вид
оси чувствительности акселерометра Y (1.51) примут вид  (3.21)
(3.21) (3.22)
(3.22) - смещения нуля акселерометров соответственно X и Y, вычисленные по формулам (3.12), (3.13) и (3.15), (3.16).
- смещения нуля акселерометров соответственно X и Y, вычисленные по формулам (3.12), (3.13) и (3.15), (3.16). , (3.23)
, (3.23) , (3.24)
, (3.24) , (3.25)
, (3.25) , (3.26)
, (3.26) , (3.27)
, (3.27) , (3.28)
, (3.28) , (3.29)
, (3.29) , (3.30)
, (3.30) , (3.31)
, (3.31) (3.32)
(3.32) (3.33)
(3.33) (3.34)
(3.34) (3.35)
(3.35) (3.36)
(3.36) (3.37)
(3.37) (3.38)
(3.38) (3.39)
(3.39) (3.40)
(3.40) (3.41)
(3.41) (3.42)
(3.42) (3.43)
(3.43) (3.44)
(3.44) (3.45)
(3.45) (3.46)
(3.46) (3.47)
(3.47) (3.48)
(3.48) (3.49)
(3.49) - средние арифметические значения кодов каналов ДУС ИИБ в каждой ориентации с номером
- средние арифметические значения кодов каналов ДУС ИИБ в каждой ориентации с номером  при отсутствии тестовой угловой скорости;
при отсутствии тестовой угловой скорости;  - средние арифметические значения кодов каналов ДУС ИИБ в каждой нечетной ориентации с номером
- средние арифметические значения кодов каналов ДУС ИИБ в каждой нечетной ориентации с номером  при вращении в положительном направлении против часовой стрелки
при вращении в положительном направлении против часовой стрелки  ;
;  - средние арифметические значения кодов каналов ДУС ИИБ в каждой нечетной ориентации с номером
- средние арифметические значения кодов каналов ДУС ИИБ в каждой нечетной ориентации с номером  ).
). 


 .
.