|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
АВТОМАТИЗАЦИЯ ТП В ЖИВОТНОВОДСТВЕ
2.6.1. ОБЩИЕ СВЕДЕНИЯ
Животноводство — важнейшая отрасль АПК. Производственно-техническая база животноводства развивается по двум направлениям: строительство новых и реконструкция действующих ферм небольшой мощности с целью внедрения новейших машин, механизмов и прогрессивных форм организации труда; строительство крупных животноводческих комплексов. Техническое перевооружение отрасли основывается на системе машин и механизмов, в том числе и электрифицированных, в ряде случаев позволяющих комплексно механизировать и автоматизировать многие важнейшие ТП. В производстве животноводческой продукции можно выделить несколько типовых ТП, характеризуемых достаточно высоким уровнем механизации: - доение коров (уровень механизации 96 %), - подача воды (95 %), - раздача кормов (67 %), - уборка навоза (66%). Естественно, именно эти процессы в первую очередь подлежат автоматизации. Большое значение имеет также автоматизированный контроль физиологического состояния животных, их массы и продуктивности. Основанием для синтеза САУ служат зоотехнические нормы и требования, а также конструктивные характеристики помещения и работающего в нем технол. оборудования.
2.6.2. АВТОМАТИЗАЦИЯ КОРМЛЕНИЯ И ПОЕНИЯ ЖИВОТНЫХ
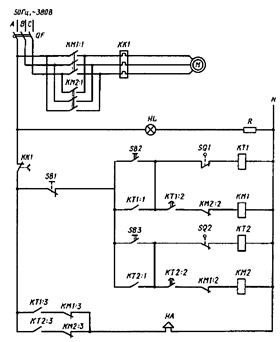
Автоматизация кормления. Полнорационное кормление — основное условие реализации генетического потенциала продуктивности стада, увеличения сроков его хозяйственного использования, а также снижения затрат и удешевления продукции. Существует два основных способа кормления крупного рогатого скота (КРС) — нормированный и ненормированный. Первый из них применяют при привязном содержании животных, второй — при беспривязном содержании. При ненормированном способе обычно скармливают грубые корма. Затраты труда на погрузку, транспортирование и раздачу кормов на фермах КРС, несмотря на достаточно высокий уровень механизации, достигают 25 % общих затрат. Система машин, действующая на этих фермах, рассчитана на использование кормовых смесей трех основных видов: 1. сухих гранулированных и брикетированных; 2. полувлажных при сенажном кормлении; 3. влажных при силосно-корнеплодном и сенажно-силосном кормлении. Технологии механизированной раздачи кормов на фермах и комплексах разнообразны. Выбор той или иной из них зависит от размеров фермы, технологии содержания скота, рациона кормления и других факторов, но в любом случае механизированная раздача кормов должна быть простой, надежной и универсальной с точки зрения реализации кормов с различными физико-механическими свойствами, а также обеспечивать нормированную раздачу кормов при минимальных затратах времени (до 30 мин). Способ кормления определяет перечень операций и тип механизмов, в них участвующих. Так, при ненормированном кормлении основные операции — доставка корма и выгрузка его в кормушки. При нормированном кормлении механизмы, участвую-щие в процессе раздачи корма, должны быть отрегулированы на точное его дозирование. Многочисленные механизмы для раздачи кормов (кормораздатчики) классифицируют на мобильные и стационарные. Мобильные кормораздатчики МКР наиболее эффективны при скармливании силоса или сенажа, поскольку исключаются затраты труда на перевалочные операции. Мобильные раздатчики доставляют корма в помещение и сами же раздают их. Они при-водятся в действие от двигателей внутреннего сгорания или электродвигателей. Радиус действия электроМКР ограничен длиной питающего кабеля или троллеев. Среди мобильных раздатчиков представляет интерес КТУ–10А, выполненный в виде двухосного прицепа с приводом от ВОМ трактора. Этот раздатчик используют для транспортирования и раздачи грубых, зеленых и сочных кормов. Его раздающее устройство включает в себя два битера, выгружной и наклонный дополнительный (для выгрузки корма в высокие кормушки) транспортеры. Норма выдачи кормов и направле-ние движения подающего транспортера изменяются кривошипно-шатунным механиз-мом. Раздатчик может быть легко переоборудован для раздачи корма на обе стороны. При откорме скота на площадках применяют мобильные раздатчики-смесители. Они позволяют раздавать животным корм в виде смесей. Эти кормораздатчики агрегатируют с тракторами или монтируют на шасси автомобиля. Мобильная кормораздача не автоматизируется, ею управляет оператор (водитель). При доставке корма на прицепных тележках важны измерение общей массы корма и обеспечение заданного соотношения между различными компонентами корма, загружаемыми обычно с помощью погрузчика. Массу корма можно определять силоизмерительными элементами, посредством которых корпус тележки крепят к шасси трактора (автомобиля). Все компоненты корма загружают последовательно до получения светового сигнала о готовности дозы. Более совершенна автоматизированная система, когда масса очередного компонента корма корректируется, исходя из массы предыдуще-го, специальным вычислительным устройством, выдающим предупредительный сигнал при загрузке 90 % дозы очередного компонента и сигнал об окончании загрузки, когда вся доза погружена в тележку. Стационарные раздатчики кормов СКР (а также и транспортеры) в зависимости от типа рабочего органа делят на скребковые, ленточные и шнековые. Скребковый раздатчик представляет собой бесконечную цепь со скребками, перемещающую корм внутри желоба. Такой раздатчик используют для транспортирова-ния корнеклубнеплодов, силоса, грубых кормов и зерна. В зависимости от особенностей конструкции корм перемещается верхней или нижней ветвью раздатчика. Производи-тельностью скребкового раздатчика управляют, изменяя скорость движения цепи. Ленточный раздатчик представляет собой бесконечную ленту из прорезиненного материала, перемещающую корм горизонтально или под небольшим углом, зависящим от сыпучести корма. Производительность ленточного раздатчика регулируют, изменяя скорость движения ленты. Шнековый раздатчик состоит из кожуха и вращающегося внутри него рабочего винта, перемещающего корм (корнеклубнеплоды, силос и т.д.). Производительность шнекового раздатчика регулируют, изменяя частоту вращения рабочего винта. Способы автоматизации стационарных раздатчиков кормов рассмотрим на примере раздатчика типа РВК, предназначенного для раздачи кормов всех видов, кроме жидких, на фермах КPC. Рабочий орган этого раздатчика в зависимости от исполнения представляет собой ленту или скребковое полотно. Корм из бункера равномерно транспортируется в кормушки с помощью электропривода М (рисунок 1). Кнопкой SB2 включается реле времени КТ1, которое своими контактами включает звуковую сигнализацию НА и с выдержкой времени магнитный пускатель KM1 электропривода М. При заполнении кормушки по всей длине срабатывает конечный выключатель SQ1, который отключает кормораздачу. Перед началом следующего кормления кнопкой SB3 включается реле КТ2, которое аналогичным образом включает звуковой сигнал НА и с выдержкой времени магнитный пускатель КМ 2. Электропривод М возвращает ленту в исходное положение до размыкания контактов конечного выключателя SQ2. При этом лента очищается от остатков корма.
Рисунок 1 – Принципиальная электрическая схема раздатчика кормов РВК-Ф-74
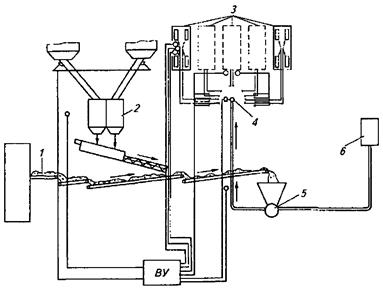
Методы приготовления и раздачи кормов на крупных комплексах по откорму молодняка КРС зависят от возраста животных. Телята первого периода откорма питаются сухим комбикормом, который подается канатно-дисковым транспортером из центральных бункеров в промежуточные, откуда секционные транспортеры перегружают его в бункера-кормушки, установленные в стойлах. Предохранительное устройство приводной станции каждого транспортера отключает электродвигатель при обрыве или чрезмерной натяжке троса. Раздача корма по промежуточным бункерам может быть автоматизирована. Загрузку бункера контролируют силоизмерительным элементом. Молодняк второго периода откорма питается смесью комбикорма и сенажа, приготовляемой в специальном помещении (кормоцехе) и раздаваемой по отдельным помещениям по системе пневмоприводов (рисунок 2). Сенаж из хранилища подается на ленточный транспортер 1 для смешивания с комбикормом, поступающим из спаренного бункера-дозатора 2. Приготовленная смесь поступает в ротационный питатель 5, а затем воздушным потоком, создаваемым компрессором 6, — в распределитель 4, направляющий ее в отдельные помещения 3 по системе надземных пневмопроводов. В коровнике пневмопровод заканчивается двухпозиционным распределителем, направляющим кормовую смесь в один из двух циклонов, где ее скорость снижается, а воздух отводится в специальные рукава. Корм ссыпается на скребковый транспортер и перемещается по всей длине кормушки. Система управления приготовлением, транспортированием и раздачей кормовой смеси, реализованная в виде вычислительного устройства (ВУ), которое обеспечивает программное управление механизмами всей технологической линии, а также суточный и месячный учет расходуемого комбикорма и сенажа с выводом результатов на печать. Программу составляют в соответствии с зоотехническими требованиями.
Рисунок 2 - Схема управления приготовлением и раздачей кормов на комплексе по откорму молодняка КРС: 1 - ленточный транспортер; 2 - бункер-дозатор; 3 - помещения; 4 - распределитель; 5 - ротационный питатель; 6 - компрессор
Для раздачи кормов свиньям также используют мобильные и стационарные раздатчики, в том числе и кормораздатчик-смеситель типа КС для раздачи влажных кормовых смесей на небольших свинофермах. Мобильность кормораздатчика-смесителя КС (рисунок 3, а) ограничено, поскольку он перемещается только по рельсовому пути, проложенному вдоль кормушек. Тележка и рабочие органы кормораздатчика приводятся в действие от четырех автономных электродвигателей. Компоненты влажной кормовой смеси загружают в бункер 4. При этом разравниватель 5 равномерно распределяет корм по бункеру, а мешалки 6 и 7 перемешивают его. По завершении процесса перемешивания заслонки дозирующих устройств 3 с помощью штурвалов вручную устанавливают в положение, соответствующее заданной дозе корма. Нажимают кнопку SB3: 2 (рисунок 3, б), и тележка приходит в движение (от двигателя М2). Как только выгрузные отверстия шнеков 2 окажутся над кормушками, оператор нажимает педаль тормоза, размыкаются контакты конечного выключателя SQ1, отключается тяговый двигатель М2 раздатчика и под действием ленточного тормоза он останавливается. Механизм раздачи корма включают кнопками SB4: 2 и SВ5: 2 (двигатели М3 и М4); при этом раздача корма может осуществляться и в одну кормушку, и в обе одновременно. Система выполняет управляющие и информационные функции. К управляющим функциям относится вся последовательность команд, обеспечивающих нормальный ход ТП и защиту механизмов в случае его нарушения. Информационные функции системы предоставляют оператору возможность контроля за ходом ТП. В числе информационных каналов: индикация рекомендуемого рецепта корма и количество подаваемых комбикормов и воды, информация о количестве корма, поступившего в каждую кормушку, о состоянии ИМ системы. Работа системы начинается с установки оператором необходимых количеств комбикорма и воды. После нажатия кнопки «Пуск» вся последующая цепь операций выполняется по команде микроконтроллера 17: открывается клапан 10 подачи подогретой до 40 °С воды, а спустя несколько минут включаются шнек 6 подачи комбикорма из бункера в ванну и привод 4 мешалки.
Рис. 4 - Технологическая схема автоматизации приготовления и раздачи жидких кормов: 1 - бункер; 2 - тензометрические преобразователи массы; 3 - смеситель; 4 - двигатель мешалки; 5 - датчик температуры корма; 6 - шнек подачи комбикорма; 7, 10, 11, 13 - клапаны; 8 - расходомер воды; 9 - расходомер корма; 12 - насос; 14 – кормопровод; 15 - кормушки; 16 - шкаф управления; 17 - микроконтроллер
Подача воды и комбикорма автоматически прекращается после выдачи заданных доз, а привод мешалки продолжает работать до окончания процесса раздачи корма. Система выдает информацию о количестве поданной в ванну воды (расходомер 8), массе комбикорма в бункере (тензометрические преобразователи 2) и температуре корма (в случае ее отклонения от нормы включается сигнализация). Раздача приготовленного корма начинается по команде оператора. В соответствии с программой кормления микроконтроллер выдает команды на открытые клапана 7 и включение насоса 12. Так начинается процесс заполнения кормопровода 14, по окончании которого закрывается клапан 7 и открывается клапан 13 для подачи корма в первую кормушку. Доза поступившего в кормушку корма измеряется расходомером 9, выходной сигнал которого через АЦП подается в микроконтроллер, и, когда поступившая доза корма сравнивается с заданной, клапан первой кормушки закрывается, а клапан подачи корма во вторую кормушку открывается. Процесс подачи корма отражается на спец-ом индикаторе с указанием номера кормушки и количества загружаемого корма. В случае опорожнения ванны-смесителя система переходит в режим «Ожидание» на время, когда будет готовиться новая порция корма, мосле чего его раздача возобновляется. Но окончании цикла раздачи корма во все кормушки блок 17 передаёт команду на промывание кормопровода и заполнение его водой до начала следующего цикла кормления. Рассмотренные СУ поточной линии стационарных кормораздатчиков сухих и влажных кормов типичны для многих механизмов. Все эти системы должны обеспечить следующее: последовательность включения машин и механизмов в порядке, обратном направлению движения корма в линии, чтобы исключить «завал» машин кормом; останов линий в требуемой последовательности в случае аварийной остановки одной из машин; контроль и сигнализацию работы механизмов. Автоматизация поения. Для поения животных используют индивидуальные и групповые поилки. Одной индивидуальной поилки достаточно для 9…15 животных. Групповая поилка для наружной установки оборудована системой электроподогрева (мощностью до 1 кВт) и предназначена для обслуживания до 200 животных. Такая поилка работает по принципу сообщающихся сосудов. Поплавковый регулятор уровня 1 (рисунок 5) поддерживает заданный уровень воды в чашах 4 поилок. При опорожнении одной из поилок вода в нее из соседней не переливается благодаря клапану 3. Этим уменьшается опасность передачи инфекции от одного животного к другому.
Рисунок 5 - Поилка для КРС: 1 - регулятор уровня; 2 - напорный бачок; 3 - клапан; 4 - чаши поилок
2.6.3. АВТОМАТИЗАЦИЯ ДОЗИРОВАНИЯ КОРМА И УЧЕТА ПРОДУКЦИИ
Особенность рассмотренных в этой главе устройств — их непригодность для индивидуальной раздачи кормов. В то же время индивидуальная раздача кормов, особенно концентрированных, имеет большие преимущества, такие, как экономный расход корма и увеличение продуктивности животных на 10…15%. Наиболее распространена индивидуальная раздача кормов на доильной площадке. Существуют также системы раздачи кормов в коровниках с использованием специальных автоматических кормовых станций. Управление этими системами может быть ручное, программное или автоматическое. Системы дозирования кормов в местах содержания животных рекомендуются для высокопродуктивных коров. С помощью автоматической кормовой станции можно организовать выдачу концентрированных кормов небольшими дозами в течение суток, когда животное само подходит к кормушке (кормовой станции). Очевидно, индивидуальная раздача кормов требует выполнения ряда условий: идентификация животного, измерение его продуктивности и наличие управляемого дозирующего устройства. Автоматическая идентификация животного. Ее осуществляют с помощью радиотехнического устройства — датчика, закрепляемого в ухе или на специальном ошейнике (рисунок 6, а).
Рисунок 6 – Автоматизированная система индивидуального кормления КРС: а — технологическая схема системы: 1 - трансподер; 2 - приемно-передающее устройство; 3 - кормушка; 4 - дозатор; 5 - бункер; 6 - микроЭВМ; б – функциональная схема: 1 - идентифицирующее устройство; 2 - транспортер; 3 - генератор электромагнитных волн; 4 - приемное устройство; 5 - блок памяти; 6 - передающее устройство; 7 - декодирующее устройство
Наиболее удачной конструкцией такого датчика является трансподер, объединяющий в одном корпусе приемное и передающее устройства (рисунок 6, б). Питание схемы трансподера осуществляется через приемную ферритовую антенну от генератора, входящего в состав идентифицирующего устройства. Передающее устройство вырабатывает последовательность импульсов в соответствии с индивиду-альным кодом, заложенным в памяти трансподера. Этот сигнал излучается передающим устройством на фиксированной частоте, принимается идентифицирующим устройством, декодируется и используется управляющим устройством системы автоматического кормления в качестве идентификатора животного. Автоматическое измерение продуктивности животного. Оно может быть выполнено различными устройствами, в том числе устройством, действующим на принципе автоматического дозатора молока, описанного далее. Более совершенная конструкция молокомера представляет собой сосуд, подвешенный на тензометрическом силоизмерителе. Этот принцип измерения удоя не имеет недостатков, свойственных измерителям объемного типа, — погрешности, вызванной изменением плотности молока из-за его вспенивания, и температурной погрешности. Недостатки конструкции — сложность очистки при промывке доильной установки и необходимость корректировки схемы силоизмерителя. Автоматическое дозирование корма. В зависимости от уровня автоматизации процесса дозирования управление дозаторами может быть ручное, полуавтоматическое или автоматическое. При ручном управлении процессом дозирования командует оператор. При полуавтоматическом дозировании оператор использует счетчики порций, устройства для подачи корма в дозатор и другие вспомогательные механизмы. При полной автоматизации процесса дозаторы работают по разомкнутому циклу, выполняя функции ИМ, отмеряющих заданное количество корма независимо от изменения его параметров, или по замкнутому циклу, когда изменение выдачи материала происходит в соответствии с командой регулирующего устройства. Конструкция дозаторов зависит от вида дозируемого корма. Для дозирования сухих рассыпных кормов применяют барабанные, тарельчатые, ленточные и шнековые дозаторы (Рисунок 7, а – г).
Рисунок 7 - Схемы дозаторов концентрированных кормов: а — барабанный: 1 - звездочка; 2 - диск; 3 - побудитель расхода; б — тарельчатый: 1 - бункер; 2 - рыхлитель; 3 - подвижный патрубок; 4 - вращающийся диск; 5 - скребок; 6 - отводный лоток; в — ленточный: 1 - приемный ковш; 2 - регулирующий элемент; 3 - коромысло; 4 - груз; 5 - ролик; 6 - рычаг; 7 - тяга; г — шнековый: 1 - приемный бункер; 2 - рабочий винт; 3 - выгрузное отверстие В барабанном дозаторе рабочим органом является ячеистый барабан, состоящий из нескольких звездочек 1 (рисунок 7, а), разделенных дисками 2. Форма поперечного сечения звездочек зависит от физико-механических свойств корма. Побудитель 3 обеспечивает равномерное распределение корма по образующей барабана. Объем выдаваемого продукта прямо пропорционален частоте вращения барабана. Тарельчатый дозатор работает следующим образом. Корм поступает в приемный бункер 1 (рисунок 7, б) дозатора, в конической части которого вращается рыхлитель 2. В нижней части бункера 1 установлен подвижной патрубок 3, положение которого опреде-ляет интенсивность поступления корма на вращающийся диск 4. При вращении диска скребок 5 сбрасывает корм в отводной лоток 6. Производительность дозатора регули-руют, перемещая подвижной патрубок и скребок или изменяя частоту вращения диска. Ленточный дозатор предназначен для непрерывного дозирования по объему или массе. Дозируемый корм поступает в приемный ковш 1 (рисунок 7, в), из которого вытекает на ленту транспортера слоем, толщина которого устанавливается автоматически с помощью шибера, закрепленного на коромысле 3 весов с грузом 4. Лента транспортера опирается на ролик 5. При увеличении нагрузки на ленту ролик 5 опускается и через систему рычаг 6 — тяга 7 воздействует на коромысло 3 весов, уменьшая толщину слоя корма на ленте дозатора. Возможные способы регулирования производительности — перемещение груза 4 по коромыслу 3 весов или изменение скорости движения ленты. Шнековый дозатор работает по принципу объемного дозирования. Корм поступает в приемный бункер 1 (рисунок 7, г) и перемещается рабочим винтом 2 к выгрузному отверстию 3. Производительность шнекового дозатора регулируют, изменяя частоту вращения винта. Рассмотренные устройства, кроме ленточного дозатора с весоизмерительным устройством, не обеспечивают постоянной производительности при изменении физических свойств корма. С этой целью применяют автоматическую настройку дозатора по его математической модели (рис. 11.8).
Рисунок 8 - Функциональная схема системы автоматической настройки дозатора Усл.обозн-ия: УУ - устройство управления; УОКР - устройство оценки качества работы; ММ - математическая модель; УКП – устройство коррекции параметров ММ
Команда на изменение производительности дозатора отрабатывается на его математической модели (ММ), и перенастройка дозатора происходит с помощью управляющего устройства (УУ). Специальное устройство (УОКР) оценивает качество работы дозатора (например, по массе дозируемого корма) и постоянно корректирует параметры его математической модели. В случае необходимости перенастройка дозатора может быть проведена по команде СУ более высокого уровня. Автоматическое взвешивание животных. Периодическое взвешивание животных (особенно свиней) — необходимое условие постоянного контроля процесса откорма. Однако обычные пружинные весы не дают точного результата, поскольку животные ведут себя беспокойно и стрелка весов не устанавливается. Существуют системы полуавтоматического взвешивания, обслуживаемые одним человеком. Дверцы, управляемые автоматически, направляют животных в весовую клеть. Сигнал от силового элемента весовой клети дешифрируется и усредняется в течение 2...3 с, после чего выводится на табло. Точность измерения (± 1 %) достаточно высокая, если учесть, что в течение дня масса свиньи изменяется на 5 % (потребление корма, дефекация и т.д.). Коров можно взвешивать в движении, поскольку имеется регулярная схема их перемещения, связанная с доением. При этом животное идентифицируется и результаты взвешивания выводятся на печать. Длину весовой клети выбирают такой, чтобы на ней поместилось только одно животное. Если же на платформе оказывается два животных, то результат измерения не учитывают.
2.6.4. АВТОМАТИЗАЦИЯ МАШИННОГО ДОЕНИЯ КОРОВ
Машинное доение повышает производительность труда в 2...5 раз, но предъявляет особо жесткие требования к соблюдению технологического режима. Так, при пониженном вакууме коровы могут полностью не выдоиться, а при повышенном — увеличивается опасность заболевания маститом; при большом разрыве между подмыванием вымени и началом доения уменьшается полнота выдаивания и т.д. Следует иметь в виду, что молокоотдача животного неравномерна, а задержка с отключением вакуума и снятием стаканов также увеличивает вероятность заболевания маститом. Особенность автоматизации доильных установок зависит от их назначения — для доения в стойлах (типа АДМ, АД, ДАС) и в специальных залах (УДТ, УДА, УДЕ). Доильный агрегат с молокопроводом АДМ-8А обеспечивает кроме собственно выдаивания животных транспортирование молока в молочное отделение, индивидуальный и групповой учет удоя 50 животных, фильтрацию, а также охлаждение и сбор молока в емкости для хранения. Конструкция установки АДМ-8А предусматривает автоматические регулирование вакуума, измерение (дозирование) удоя, промывку и дезинфекцию молочной линии по окончании доения. Рассмотрим конструкцию и принцип действия этих автоматических устройств. Они работают за счет вакуума. Автоматический регулятор вакуума представляет собой регулятор прямого действия, настраиваемый на разрежение 45 кПа. При включении вакуум-насоса перепад давления, действующий на клапан 1 (рисунок 9, а), уравновешивается набором грузов 8, подвешенных на пружине 4. При изменении давления в вакуум-проводе 2 клапан 1 опускается или поднимается вверх, уменьшая или увеличивая подсос атмосферного воздуха между корпусом и клапаном. Через прозрачный колпак 5 регулятора по положению грузов можно оценить запас производительности вакуум-насоса. Для гашения колебаний регулирующего органа служат две демпфирующие шайбы, соединенные с грузом и погруженные в слой масла таким образом, чтобы между ним и грузом оставался зазор 8…12 мм. Производительность воздушной системы можно оценить по количеству инжектируемого воздуха, измеряемому флажковым индикатором 3. Прозрачный корпус индикатора имеет три метки, соответствующие потоку воздуха 5, 10 и 15 м3/ч. В общем случае вакуум поддерживается более стабильным, если такты сосания и сжатия всех четырех сосков не совпадают или хотя бы объединены попарно. Перспективным считают программное управление величиной вакуума, частотой пульсации и соотношением тактов пульсаций в процессе доения. Например, в начале и конце доения устанавливают вакуум 35 кПа и частоту пульсаций 48 Гц, а в основное время — 50 кПа и 60 Гц. Автоматический дозатор молока рассчитан на измерение удоя группы коров, закрепленных за одним дояром. Дозатор работает в следующих режимах. 1. Наполнение мерной камеры. Молоко поступает в мерную камеру 8 через молокоприемник 4 и шайбу 6. По мере наполнения камеры 8 поплавок 5 всплывает и отсекает мерную камеру 8 от молокоприемника 4. При этом отверстие 3 сообщает внутреннюю полость трубки 10 с атмосферой, а сильфон 2 под давлением атмосферного воздуха переключает счетчик 1. 2. Опорожнение мерной камеры. Под давлением атмосферного воздуха молоко из мерной камеры 8 вытесняется в молокосборник 9. По мере опускания поплавка отверстие 3 разобщается с атмосферой, вакуум в молокосборнике восстанавливается и начинается новый цикл заполнения мерной камеры. Погрешность дозатора ±1, 5% при производительности 12 кг/мин.
Рисунок 9 – Аппаратура автоматизации доильных установок: а — регулятор вакуума: 1 - клапан: 2 - вакуум-провод; 3 - индикатор количества инжектируемого воздуха; 4 - пружина; 5 - прозрачный колпак; 6 - масло; 7 - демпфирующие шайбы; 8 - груз; б — автоматический дозатор молока: 1 - счетчик; 2 - сильфон; 3 - отверстие; 4, 9 – молокоприемники; 5 - поплавок; 6 - шайба; 7 - клапан; 8 - мерная камера; 10 - трубка; в — групповой счетчик молока; г — автоматическое управление молочным насосом: 1 - молокоприемник; 2 - поплавок; 3 - молочный насос; 4 - предохранительная камера; 5 - регулятор вакуума; 6 - вакуум-провод
Групповой счетчик молока действует по аналогичному принципу, заключающемуся в попеременном заполнении молоком качающегося лотка при его повороте вокруг своей оси (рисунок 9, в). При каждом двойном ходе рычажного устройства срабатывает магнитоуправляемый контакт (геркон) счетного прибора, измеряющего удой по объему лотка и числу срабатываний контактов. Более точные результаты, не зависящие от температуры молока, получают при использовании устройств для взвешивания молокоприемников. В качестве силоизмерительного органа используют тензометрическую балку. На крупных молочных комплексах учет молока ведут по числу включений молочного насоса (рисунок 9, г). Молочно-воздушная смесь из двух ветвей молокопровода поступает в воздухоразделитель (молокоприемник), представляющий собой стеклянную емкость 1 вместимостью 50 л, соединенную с предохранительной камерой 4 и вакуумным регулятором 5. Предохранительная камера 4 предотвращает попадание молока в вакуум-провод 6 при отказе молочного насоса 3. По мере заполнения сосуда молокоприемника всплывает поплавок 2, в который вмонтирован постоянный магнит. Последний управляет несколькими герконами, установленными на высоте, соответствующей дозе 5, 10 и 15 л. При наборе соответствующей дозы молока контакты геркона замыкаются и включается молочный насос 3. После откачки дозы молока насос автоматически отключается. Процесс повторяется. Автомат промывки обеспечивает выполнение целого ряда операций, в том числе прополаскивание молокопроводов холодной водой перед доением, циркуляционную промывку и дезинфекцию этих путей по окончании доения, прополаскивание молокопроводов теплой водой в конце цикла промывки, просушку молокопроводов теплым воздухом после удаления остатков моющих растворов, кратковременное включение молочного насоса в конце просушки для удаления остатков воды из молокосборника и, наконец, отключение вакуум-насоса и командного аппарата. Автоматизированные установки дня доения коров «Тандем» (УДА-8А) и «Елочка» (УДА-16А) в целом унифицированы между собой, но различаются конструкцией станков. Установки «Тандем» комплектуют индивидуальными доильными станками, а установки «Елочка» — групповыми станками, что позволяет выпускать коров после выдаивания группой и выдавать концентрированные корма одинаковыми порциями. Это рационально лишь при специально подобранном по продуктивности стаде. Установка «Тандем» рекомендуется для доения коров на племенных фермах с неоднородным по продуктивности стадом. Она имеет индивидуальные станки, расположенные по четыре с каждой стороны рабочей траншеи доильного зала. Каждый станок состоит из входной и выходной дверей, кормушки и шнекового дозатора комбикормов. Комбикорм к каждому дозатору подается канатно-дисковым транспортером. Доильную установку «Елочка» применяют на молочных фермах и комплексах как с беспривязным, так и с привязным содержанием коров, которые подобраны в группы по интенсивности молокоотдачи и продуктивности. Технологический процесс доения на установках УДА-8А и УДА-16А включает в себя следующие операции: - подготовку доильной установки к доению, заключающуюся в загрузке комбикорма в дозаторы-накопители, преддоильном ополаскивании молокопроводов и доильной аппаратуры, переводе доильных аппаратов из положения ополаскивания в положение доения и включении в работу вакуумных установок; - впуск коровы (УДА-8А) или группы коров (УДА-16) в доильный станок, включение дозаторов комбикормов; - обмыв вымени из пистолетных распылителей, обтирание его полотенцем, сдаивание первых струек молока в специальную посуду и контроль состояния сосков; - включение доильного аппарата и надевание доильных станков на соски вымени, доение, машинное додаивание; - отключение аппарата и снятие доильных станков; - выпуск коровы (коров) из доильного станка; - учет удоя от каждой коровы и взятие проб молока (при каждом доении или только при контрольном — в зависимости от исполнения установки); - фильтрацию, охлаждение и транспортирование молока в емкость для хранения; - циркуляционную промывку и дезинфекцию молокопроводов и доильной аппаратуры после доения. Манипулятор МД–Ф–1 облегчает операции по надеванию доильных стаканов, обеспечивает контроль за интенсивностью доения, автоматическое додаивание, отключение аппарата от вакуумной линии, снятие доильных стаканов с сосков вымени и вывод доильного аппарата из-под коровы. Основной функциональный узел автомата управления (рисунок 10) —пневмодатчик 7. В исходном положении головка 14 упирается в скобу 6 и малые дозы молока поступают в камеру датчика, откуда выливаются через калиброванное отверстие 11 в молокопровод 9. При нарастании потока молока поплавок 12 всплывает и освобождает скобу 6, которая под действием собственной массы откидывается вправо. С этого момента начинается автоматический контроль за процессом доения. Основная часть молока вытекает через обводной канал в молокопровод. При уменьшении интенсивности потока до 400 г/мин молоко успевает вытечь через калиброванное отверстие 11, поплавок и укрепленная на нем головка опускаются вниз, открывая отверстие канала штуцера 1 (рисунок 11) головки цилиндра 2 (см. рисунок 10) додоя, который через рычаг манипулятора оттягивает стаканы вниз, обеспечивая механическое додаивание. При снижении потока до 200 г/мин поплавок опускается еще ниже, клапан 13 отключает доильные стаканы от вакуума (молокопровода), штуцер I (см. рисунок 11) сообщается с атмосферой. Штуцер II головки подключает вакуум к пневмоцилиндрам манипулятора, доильные стаканы снимаются и выводятся из-под коровы. Устанавливается манипулятор на вертикальной стойке стакана или специально монтируемой опоре.
Рисунок 10 – Схема управления доильным аппаратом с манипулятором МД-Ф-1: 1 - воздуховод чистого воздуха; 2 - цилиндр додоя; 3 - цилиндр вывода доильного аппарата из-под коровы; 4 - вакуум-провод; 5 - кран; 6 - скоба; 7 - пневмодатчик; 8 - зажим; 9 - молокопровод; 10 - технологический вакуум-провод; 11 - калибровочное отверстие; 12 - поплавок; 13 - клапан; 14 - головка; 15 - пульсатор; 16 - доильный аппарат
Рисунок 11 – Схема работы пневмодатчика манипулятора: а — исходное положение; б — начало контроля за доением; в — додаивание; г — снятие доильного аппарата: 1 - головка пневмодтчика; 2 - плунжер; 3 - скоба; 4 - штуцер переливной; 5 - корпус; 6 - поплавок; 7 - игла; 8 - отверстие слива молока; 9 - клапан; 10 - штуцер входа молока; 11 - воздушное отверстие; 12 - штуцер постоянного вакуума
На рисунке 11 пневмодатчик изображен в четырех положениях: исходном (а), когда головка упирается в скобу; в начале контроля за доением (б), когда интенсивность молокоотдачи максимальна; в режиме додаивания (в); в момент окончания доения и снятия доильных станков (г). Кран 5 (см. рисунок 10) служит для принудительного подъема и поддержания доильных стаканов при их одевании на соски. Заданный вакуум в доильных аппаратах и всей системе доильной установки поддерживается вакуумными регуляторами прямого действия, устройство которых рассмотрено ранее. Мировой уровень механизации ТП в животноводстве достиг полной автоматизации процесса доения. Главная операция при этом — автоматическое надевание доильных стаканов. Существует несколько конструкций роботов, выполняющих данную операцию. Механическая рука подводит аппарат под животное, а затем поочередно одевает стакан за стаканом. Положение сосков каждого животного находится в памяти доильного робота, а точная «наводка» стаканов обеспечивается прецизионными ультразвуковыми или оптическими датчиками. Один такой робот обслуживает до 40 животных. Полная автоматизация процесса доения позволяет перейти к четырехразовому доению, что увеличивает удой. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 2852; Нарушение авторского права страницы