|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Автоматизация башенных водокачек.
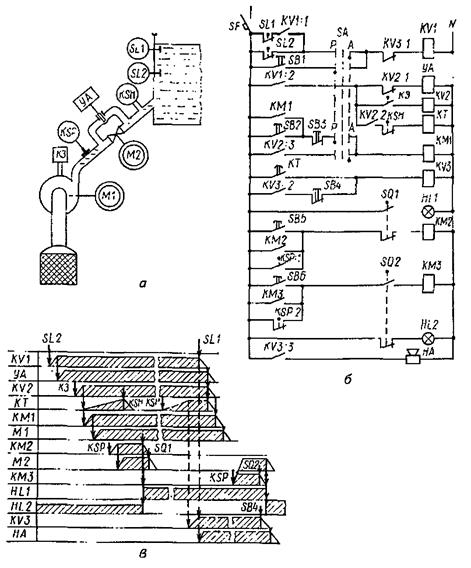
До 90 % насосных установок сельскохозяйственного водоснабжения составляют башенные водокачки Рожновского с погружными электродвигателями (рисунок 2, а).
Рисунок 2 – Башенная водокачка с погружным электродвигателем (а), схема датчика уровня воды (б) и принципиальная электрическая схема управления (в): 1 - электродвигатель; 2 - насос; 3 - водоподъемная труба; 4 - хомут; 5 - скважина; 6 - электрический кабель; 7 - плита; 8 - манометр; 9 - задвижка; 10 - трубопровод; 11 - помещение; 12 - бак; 13 - водосливная труба; 14 - датчик уровня воды; 15 - клапан; 16 - люк; 17, 18 - лестницы; 19 - скоба; 20 - защитный корпус; 21, 22, 23 - трубчатые электроды соответственно верхнего уровня, общий и нижнего уровня
Погружные электронасосы типа ЭЦВ (Э - электропогружной, Ц — центробежный, В — для воды) выпускают производительностью 0, 63…1000 м3/ч при напоре 12…680 м, Погружной электродвигатель 1 в монолите с многоступенчатым насосом 2 закрепляют на водоподъемных трубах 3 и опускают в скважину 5. Трубы подвешивают к плите 7, установленной в помещении 11. Скважины выполняют из обсадных труб диаметром 100…450 мм. Электродвигатели выполняют сухими, полусухими и заполненными маслом или водой. Наиболее распространены электродвигатели, заполненные водой. Резинометаллические или пластмассовые подшипники их смазываются также водой. К электродвигателю подводят кабель 6, закрепленный на водоподъемных трубах хомутами 4. Всасывающая часть имеет сетку, задерживающую крупные примеси, находящиеся в воде. Бак 12 водонапорной башни выполняют сварным из листовой стали и устанавливают на кирпичную, железобетонную или металлическую опору. К баку подводят напорно-разводящий трубопровод 10. Конец напорной трубы доводят до верхнего уровня, а отвод воды из бака происходит через обратный клапан у нижнего уровня. Бак оборудуют внешней 17 и внутренней 18 лестницами, люком 16, вентиляционным клапаном 15, датчиками уровня 14 и водосливной трубой 13, исключающей перенаполнение бака водой в случае неотключения насоса от датчиков верхнего уровня. На водопроводе ставят манометр 8 и задвижки 9. Электродный датчик уровня (рисунок 2, б) состоит из защитного корпуса 20, скобы 19 для крепления датчика в баке и трубчатых электродов: верхнего уровня 21, нижнего уровня 23 и общего 22. Внутри центрального электрода расположен нагревательный элемент, который включают в холодное время для исключения обмерзания электродов. На рисунке 2, в показана электрическая схема управления типа ПЭТ башенной насосной водокачкой. Она позволяет в ручном и автоматическом режимах пускать и останавливать электронасос, защищает электродвигатель от перегрузок и коротких замыканий, сигнализирует с помощью сигнальных ламп о включенном и отключенном состоянии насоса. Вручную электронасос включают, пере воля переключатель SA в положение Р, а отключают— переводя его в положение О. Автоматический режим работы задают, переводя переключатель SA в положение А. Если в башне нет воды, то контакты (электроды) датчиков верхнего SL1 и нижнего SL2 уровней разомкнуты, следовательно, контакты KV: 1 реле КV в цепи катушки магнитного пускателя КМ замкнуты. Магнитный пускатель срабатывает и включает электронасос М. По мере накопления воды в башне перекрываются водой сначала контакты SL2 нижнего уровня, а затем SL1 верхнего уровня, и реле KV через воду получает питание. Контактами KV: 1 оно разрывает цепь питания магнитного пускателя КМ, и электронасос отключается. Реле KV остается включенным через контакты SL1, КV: 2 и SL2. Оно отключится только тогда, когда вода разомкнет не только верхние контакты, но и нижние. В этом случае контакты KV: 1 в цепи магнитного пускателя КМ вызовут повторное включение электронасоса М. Отключенное состояние насоса определяют по зеленой лампе HL1, а включенное — по красной лампе HL2. Для защиты двигателя применены тепловые расцепители магнитного пускателя КМ и автомата QF. На холодный период года выключателем S включается электрообогреватель ЕК датчика, предотвращающий обледенение и вмерзание электродов датчика уровня воды в лед. Кроме рассмотренной станции управления типа ПЭТ, работающей с электродвигателями мощностью от 1 до 6 кВт, применяют другие станции управления аналогичного типа, а также систему автоматического управления насосными агрегатами с бесконтактными станциями управления типа ШЭТ и «Каскад».
2.9.3. СТАНЦИИ УПРАВЛЕНИЯ НАСОСНЫМИ АГРЕГАТАМИ
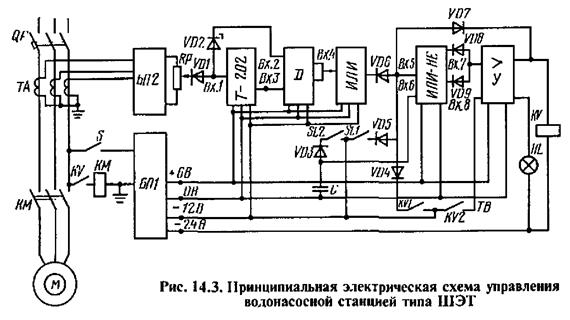
Бесконтактная станция управления тина ШЭТ выполнена на полупроводниковых логических элементах. По сравнению с контактными схемами бесконтактные станции дороже, но удорожание окупается увеличением срока службы и надежности работы как самой системы управления, так и электродвигателя. Для защиты электродвигателя от перегрузок и КЗ имеется специальный блок защиты. Принципиальная схема станции (рисунок 3) работает следующим образом. При отсутствии воды в водонапорной башне контакты датчиков верхнего SL1 и нижнего SL2 уровней разомкнуты. Вследствие этого на входах Вх.5 и Вх.6 сдвоенного логического элемента ИЛИ — НЕ сигналы отсутствуют, а на его выходе сигналы появляются и через диоды VD8 и VD9 поступают на усилитель У, который усиливает входной сигнал, вызывающий срабатывание промежуточного реле KV и загорание сигнальной лампы HL. Реле KV своими контактами включает магнитный пускатель КМ, а последний — электронасос М. По мере заполнения башни водой сначала замыкаются контакты датчика SL2 нижнего уровня, а затем контакты датчика SL1 верхнего уровня.
Рисунок 3 - Принципиальная эл. схема управления водонасосной станцией типа ШЭТ
При замыкании контактов SL2 на Вх.6 подается отрицательный потенциал, вследствие чего на диоде VD9 выходной сигнал исчезает, а на диоде VD8 выходной сигнал есть, благодаря чему насос не отключается. Когда вода замыкает контакты датчика SL1 верхнего уровня, на Вх.5 поступает сигнал и на диоде VD8 выходной сигнал также исчезает. Вследствие этого лампа НL и реле KV отключаются, что вызывает выключение электронасоса. При расходе воды вначале размыкаются контакты SL1 верхнего уровня, но это не приводит к включению электродвигателя, так как вместо выходного сигнала от датчика на вход Вх.5 через диод VD7 и реле KV подается отрицательный потенциал от источника — 24 В. При размыкании контактов SL2 нижнего уровня на Вх.6 сигнал исчезает, что вызывает автоматическое повторное включение электронасоса. Элементы логики и выдержки времени D, а также элемент ИЛИ вместе с блоком питания БП2 защищают двигатель от перегрузок и работы в аварийных режимах. Датчиком тока служит трансформатор тока ТА, выпрямленный ток которого поступает на потенциометр RP. Посредством потенциометра RP устанавливают значение токов срабатывания защиты при перегрузках и коротких замыканиях электродвигателя. При токах перегрузки срабатывает бесконтактное реле, с которого на вход Вх.3 поступает сигнал, вызывающий срабатывание элемента выдержки времени D. С элемента D сигнал с выдержкой времени через элемент ИЛИ поступает на вход Вх.5 элемента ИЛИ — НЕ, что вызывает отключение реле KV и электронасоса М. При токах КЗ напряжение на потенциометре RP возрастает в несколько раз, вследствие чего открывается стабилитрон VD2 и через вход Вх.2 на элемент D поступает сигнал, минуя цепочку выдержки времени в элементе D. С элемента D сигнал последовательно поступает на входы Вх.4 и Вх.5 и исчезает у входа Вх.7, что вызывает отключение электронасоса без выдержки времени. Станция ШЭТ позволяет управлять электронасосом при помощи телемеханики. Для этого устанавливают реле приема телесигналов управления, контакты KV2 и КV1 которых соответственно включают и отключают электронасос. Параллельно контактам можно установить кнопочные станции для дистанционного включения и отключения насоса. Логические элементы питаются от блока питания БП1, который подключается к электрической сети выключателем S. Комплектная станция «Каскад». (рисунок 4). Станция предназначена для автоматического и дистанционного управления погружными электродвигателями (мощностью от 1 до 65 кВт) водонасосных и дренажных станций. В станции предусмотрена защита электродвигателя от перегрузок, коротких замыканий и сухого хода, т.е. от работы двигателя без воды (для двигателей мощностью 4, 5 кВт и выше).
Рисунок 4 – Функциональная схема устройства «Каскад». Условные обозначения: ДСХ – датчики сухого хода; ЯЗ - ячейка защити; ЯП - ячейка питания; РИВ, РИО - контакты реле исполнительных включений и отключений; КВУ, КНУ - контакты датчиков верхнего и нижнего уровней воды; ДДВ - контакты датчика давления воды; ЯУУ - ячейка управления по уровню; ЯУД - ячейка управлении по давлению Станция управления «Каскад» может работать в двух режимах: управление по уровню и давлению. Однако серийные станции обычно рассчитаны на один из режимов, как правило, управление по уровню. В этом режиме команда на включение насоса вырабатывается ячейкой управления по уровню (ЯУУ) при опорожнении бака (контакты датчика верхнего КВУ и нижнего КНУ уровней разомкнуты). Эта команда поступает в выходной узел (ВУ) и через определенное время (до 30 с), устанавливаемое при наладке, включается реле K1 и магнитный пускатель КМ. Когда уровень воды достигнет контактов датчика КВУ, ячейка ЯУУ вырабатывает команду на отключение насоса. Команда поступает в ВУ, реле К1 и пускатель КМ обесточивается. При падении уровня воды ниже местоположения датчика КНУ цикл повторяется. Возможно также использование станции «Каскад», оборудованной ячейкой управления по давлению ЯУД (ячейка ЯУУ отсутствует). При снижении уровня воды в водонапорной башне уменьшается давление воды в водопроводе, фиксируемое датчиком давления воды ДДВ. При замыкании контактов этого датчика ячейка ЯУД выдает команду на включение насоса, которая запоминается ВУ. При этом насос остается включенным независимо от состояния ДДВ. Отключение насоса произойдет через определенное время, необходимое для заполнения бака (резервуара) водой. Это время (5...90 мин) устанавливается обслуживающим установку персоналом. Повторно насос включается автом-ски после понижения уровня воды в баке и замыкания контактов ДДВ. Работа насосной установки в режиме дренажа аналогична работе в режиме водоподъема, но датчики КВУ и КНУ в схеме заменяются переключателем S. При перегрузке или обрыве питающей фазы возрастает ток, потребляемый двигателем, и ячейка зашиты (ЯЗ) подает команду ВУ на отключение двигателя. При понижении уровня воды в скважине контакты датчика сухого хода размыкаются и ячейка ЯЗ подает команду на отключение двигателя и включение сигнальной лампы HL2. Повторный пуск насоса после аварийных отключений возможен после определения и устранения причины аварийного отключения и повторной подачи напряжения в схему автоматическим выключателем QF. В случае кратковременного (до 30 с) исчезновения питающего напряжения происходит самопуск насоса. Возможны также дистанционное включение и останов станции «Каскад» при замыкании контактов соответственно РИВ и РИО.
2.9.4. АВТОМАТИЗАЦИЯ ГИДРОМЕЛИОРАТИВНЫХ СИСТЕМ (ГС) Общие сведения. Под гидромелиоративной системой (ГС) понимают совокупность оросительных, осушительных и обводнительных систем, создающих благоприятный водный режим для развития растений. Оросительная система предназначена для пополнения запасов воды в недостаточно увлажненной почве и применяется в тех зонах, где растения систематически испытывают недостаток в воде. Система состоит из водозаборных сооружений, магистральных каналов и распределительной сети по участкам орошения. Осушительная система предназначена для отвода избытка воды и осушения избыточно увлажненных и заболоченных земель. Она состоит из открытых водосточных каналов, закрытых дренажных водотоков и других устройств. Обводнительная система предназначена для снабжения водой населенных пунктов, сельскохозяйственных животных и птицы в степных и полупустынных районах, не имеющих естественных водоисточников. Система состоит из прудов, небольших каналов и колодцев. Обводнительная система имеет менее разветвленную распределительную сеть, чем оросительная.
Автоматизация ГС имеет свои особенности, обусловленные следующими специфическими свойствами объектов управления: Во-первых, объекты управления отличаются большими мощностями установок и значительной рассредоточенностью по площади. Управляемые объекты связаны через водную среду, вследствие этого имеет место взаимное влияние между ними, например, изменение уровня или расхода воды в одном канале вызывает изменение этих же параметров в соседних каналах. Таким образом, процесс автоматического регулирования должен учитывать связь между регулируемыми параметрами на большой территории. Во-вторых, все оборудование гидротехнических сооружений, начиная от мощных головных водозаборных устройств и кончая выпускными устройствами на поле, должно работать синхронно и согласованно. В водоводах существует естественная прямая гидравлическая связь от вышележащих водозаборных сооружений к нижележащим водовыпускным. Для автоматизации таких систем необходима организация телемеханических каналов связи. В-третьих, составленные ранее планы водоиспользования требуют постоянной корректировки в зависимости от атмосферных условий, поведения грунтовых вод, состояния источников воды для орошения и других факторов. Поэтому для централизованного управления такими рассредоточенными системами и своевременной корректировки режимов их работы требуется автоматизация процессов сбора и передачи на диспетчерские пункты управления большого количества информации о состоянии отдельных звеньев и параметров многочисленных объектов, исчисляемых сотнями. Число измерительных и исполнительных органов должно быть таким, чтобы обеспечивалось надежное управление и контроль за параметрами во всех зонах оросительной сети. В-четвертых, процесс распределения воды характеризуется большим запаздыванием и малыми скоростями увеличения и уменьшения расходов, особенно в открытых каналах. Поэтому для обеспечения непрерывного управления и потребления воды следует иметь резервные объемы и емкости и знать характеристики системы как в установившихся, так и в переходных режимах. В-пятых, большинство водохозяйственных установок работает на открытом воздухе, в основном в вегетативный период, а в зимний период они находятся в нерабочем состоянии и при несоблюдении условий хранения разрушаются. При всем многообразии объекты гидромелиоративных систем можно разделить на такие основные группы: - головные водозаборные и магистральные сооружения; - регулируемые гидротехнические сооружения линейного вододеления с электрическими или гидравлическими ИМ; - насосные станции машинного водоподъема для питания дождевальных машин, осушительных систем и т.д.; - насосные установки артезианских скважин вертикального дренажа, орошения и водоснабжения; - мелиорированные поля при различных способах управления влажностью почвы. Рассмотрим общие подходы к автоматизации таких важнейших гидромелиоративных процессов, как водоподача, водораспределение и регулирование влажностного режима почв. Автоматизация водораспределения. Существуют открытые (каналы) и закрытые (трубопроводы) системы водораспределения. Автоматизация открытой системы водораспределения и регулирования уровня воды основывается на стабилизации уровня в верхнем или нижнем бьефах гидротехнических сооружений. Существует несколько способов регулирования, каждый из которых имеет свои преимущества и недостатки и должен быть соотнесен с местными условиями. При регулировании по верхнему бьефу головное сооружение магистрального канала оборудуют средствами автоматизации, обеспечивающими поступление в оросительную систему заданного количества воды независимо от колебаний уровня воды в нижнем бьефе. Распределение поступающей в систему воды обеспечивается за счет установки в магистральном канале перегораживающих сооружений (рисунок 5), автоматически поддерживающих уровень в верхнем бьефе. Регулятор уровня действует по многопозиционному принципу, позволяя регулировать степень подъема заграждения 1. Специальное реле времени предупреждает срабатывание регулятора при случайных колебаниях уровня воды верхнего бьефа. Особенность схемы регулирования по верхнему бьефу заключается в том, что между бьефами магистрального канала, образовавшимися в результате установки автоматических регуляторов уровня, существует только прямая гидравлическая связь. В результате при прекращении полива какого-то участка и закрытии соответствующего водовыпуска излишний расход воды поступает в нижерасположенный бьеф, из него в следующий и т.д. При этом все нижерасположенные перегораживающие сооружения сохраняют постоянный уровень в своих бьефах, но вся избыточная вода уходит на сброс. В случае незапланированного увеличения потребления воды одним из потребите-лей все нижерасположенные перегораживающие сооружения автоматически перекрыва-ются, транзитные расходы уменьшаются и наиболее удаленные потребители не получают достаточного количества воды.
Рисунок 5 – Схема стабилизации верхнего бьефа: 1 – заграждение; 2 – привод заграждении
Регулирование по верхнему бьефу дает наибольший эффект при оснащении системы средствами автоматики и телемеханики, обеспечивающими управление и оперативный контроль за состоянием всех сооружений системы и позволяющими оперативно устранять отклонения от заданного режима работы, обеспечивая баланс между водозабором и водопотреблением. При регулировании по нижнему бьефу разбор воды потребителями не ограничивается. Информация о разборе воды передается на головное сооружение для автоматического регулирования подачи воды в оросительную систему путем установки по длине магистрального канала заграждений, оборудованных автоматикой поддержания уровня в своих нижних бьефах. При этом способе регулирования между бьефами магистрального канала существует не только прямая, но и обратная гидравлическая связь. В результате каждое изменение режима работы нижерасположенного бьефа вызывает перестройку работы всех вышерасположенных сооружений, включая и головное, которое, кстати, также оборудуют автоматическим регулятором, стабилизирующим уровень в начале магистрального канала. Например, при увеличении потребления воды на каком-то участке оросительной системы автоматически открывается вышерасположенное заграждение, поддерживая уровень в нижнем бьефе. Понижение уровня в верхнем бьефе отрабатывается следующим заграждением вплоть до головного сооружения, увеличивающего подачу воды в магистральный канал. Преимущество этого способа регулирования — наличие постоянного резерва воды, распределённого в бьефах магистрального канала. Смешанное регулирование — это регулирование по нижнему бьефу, дополненное ограничениями колебаний максимальных и минимальных уровней в верхних бьефах. Этот способ исключает опасность переполнения бьефов и перелива воды через бровку канала в случае аварии на головном сооружении. Такая система в нормальных условиях осуществляет регулирование по нижнему бьефу, а в случае опасности переполнения или опорожнения магистрального канала переключается на регулирование по верхнему бьефу, поддерживая уровни за счет увеличения или уменьшения концевого сброса. Регулирование непосредственным отбором расходов не требует установки перегораживающих заграждений. Отводы оборудуют автоматическими устройствами, позволяющими стабилизировать расходы воды независимо от уровня в маг-ном канале. В общем случае способ регулирования водораспределения должен быть определен технико-экономическим расчетом, учитывающим рельеф местности, водные ресурсы, мелиоративное состояние земель, режим орошения и другие факторы. Закрытые оросительные системы (ЗОС) по сравнению с открытыми обладают такими преимуществами, как меньшие потери воды на сбросы, испарение и фильтрацию, меньшее число регулирующих устройств, сокращение транспортирующей сети и повышение коэффициента использования земли. Водораспределение в ЗОС происходит так же, как и при регулировании по верхнему бьефу в открытых каналах, поскольку поступившая в систему вода распределяется посредством автоматизированных гидрантов, задвижек и водовыпусков, работа которых контролируется с диспетчерского пункта так же, как и работа головного сооружения, представляющего собой насосную станцию или водозаборный гидроузел (при комбинированной, т.е. самотечно-напорной системе).
2.9.5. АВТОМАТИЗАЦИЯ ПРОЦЕССОВ УПРАВЛЕНИЯ ВЛАЖНОСТНЫМ РЕЖИМОМ ПОЧВ
Поверхностное орошение — наиболее простой способ, при котором используются закрытые трубопроводы или открытые лотки. Вода распределяется системой распределительных и поливных лотков, оборудованных гидравлическими регуляторами расхода. Дождевание — распространенный способ машинного орошения, эффективно повышающий влажность и снижающий температуру в приземном слое воздуха. Дождевальные системы хорошо поддаются механизации и автоматизации. Принципиальная схема стационарной системы дождевания с программным управлением представлена на рисунке 6.
Рисунок 6 – Принципиальная схема ав-зации стационарной системы дождевания: 1 - насосная станция; 2 - перепускной клапан; 3 - напорный клапан; 4 – магистральный напорный трубопровод; 5 - поливные трубопроводы; 6 - дождевальные аппараты
Система состоит из насосной станции 1, магистрального напорного трубопровода 4 и поливных трубопроводов 5 с установленными на них дождевальными аппаратами 6, каждый из которых подключен к трубопроводу через трехпозиционный гидроклапан. При подаче воды в напорный трубопровод открываются гидроклапаны дождевальных аппаратов первого ряда (ближайшие к напорному трубопроводу). Через заданное время программное устройство KS1 формирует кратковременный импульс снижения давления в напорном трубопроводе за счет закрытия напорного клапана 2 и открытия перепускного клапана 3. Каждый такой импульс приводит к закрытию гидроклапанов действующего ряда дождевальных аппаратов и открытию следующего. Преимущество описанной системы — отсутствие необходимости в специальных каналах связи на орошаемой площади, недостаток — возможность изменения нормы полива только от одного дождевального аппарата к другому в строгой последовательности. Значительно более совершенны системы дождевания с широкозахватными дождевальными машинами типа «Фрегат», «Волжанка», ДМ и т. д. «Фрегат» представ-ляет собой самоходную дождевальную машину с гидравлическим приводом передвижения, представляющую собой водоподводяший трубопровод с дождевальными аппаратами, установленный на тележках. Тележки перемещаются по кругу вокруг неподвижной опоры, совмещенной с гидрантом для подачи воды в трубопровод. При этом каждая тележка имеет свой гидропривод, который работает за счет энергии воды, поступающей из трубопровода. Оригинальная схема гидропривода (рисунок 7) позволяет решить две задачи: автоматическое управление передвижением и управление процессом дождевания.
Рисунок 7 – Схема гидропровода передвижения дождевальной машины «Фрегат»: 3 — возвратная пружина; 10 — гибкий шланг; 13 — регулирующий стержень;
Вода из водоподводящего трубопровода 14 через регулирующий клапан 11 поступает в распределительный клапан-распределитель 4. Если плунжер клапана-распределителя находится в верхнем положении, то вода по пустотелому штоку 7 поршня 8 поступает в цилиндр 9. Так как поршень закреплен на опоре машины неподвижно, а цилиндр способен передвигаться, то под давлением воды он перемещается вверх, поворачивая колеса 1 тележки на определенный угол через систему рычаг 5 —толкатель 2. В крайнем верхнем положении цилиндра рычаг 5 переводит рычажный переключатель 6 и связанный с ним плунжер клапана-распределителя 4 в нижнее положение. В результате цилиндр отсекается от трубопровода, сообщается со сливом и под действием собственного веса опускается, а вода при этом сливается. Толкатель 2 перемещается вправо и входит в зацепление со следующими зацепами колес. В крайнем нижнем положении цилиндра рычажный переключатель 6 перемещает плунжер клапана-распределителя вниз и цикл повторяется. Естественно, что для сохранения линейности трубопровода тележки, находящиеся на разном расстоянии от оси, должны двигаться с разной линейной скоростью. Схема гидропривода тележек обеспечивает это условие. При отставании тележки изгибается прилегающий к ней участок трубопровода, что приводит к натяжению тяги 12, связанной с регулирующим клапаном 11. Перемещение плунжера этого клапана вниз увеличивает подачу волы в цилиндр 9, уменьшает время его заполнения и увеличивает частоту ходов толкателя. В результате скорость тележки возрастает и трубопровод машины выравнивается. Аналогичным образом, но с уменьшением подачи воды, замедляется ход тележки, если трубопровод изогнулся в противоположную сторону. Такой системой регулирования снабжены все тележки, кроме последней. Эта последняя имеет на трубопроводе и цилиндре кран-задатчик, с помощью которого задается скорость движения тележки, а остальные тележки по описанной схеме синхронизируют с ней свое движение. Равномерность увлажнения орошаемой площади обеспечивается соответствующей регулировкой дождевальных аппаратов (чем дальше от неподвижной опоры, тем производительность выше) и составлением специальной программы полива, учитывающей рельеф, время суток и метеоусловия. Эту программу составляют на сутки, а выполняется она программным устройством. Широкозахватные дождевальные машины «Волжанка» и «Днепр» — это машины позиционного действия. В машине «Днепр» обеспечивается автоматическое выравнивание трубопровода во время передвижения, причем в качестве датчиков изгиба трубопровода используются конечные выключатели в цепи управления приводными двигателями. Капельное орошение — самый экономичный способ увлажнения, при котором вода подается прямо в корнеобитаемый слой небольшими дозами через специальные водовыпускные отверстия (капельницы), устанавливаемые через каждые 50…100 см на увлажняющих трубопроводах. Управление системой капельного орошения должно обеспечивать нужную очередность увлажнения отдельных участков и корректировать норму полива каждого из них. Первая задача решается с помощью клапанов с электромагнитным приводом, управляемых программным устройством, вторая — изменением напора в распределительных трубопроводах, а также дозированием времени работы отдельных секций поливаемого участка. САУ капельным орошением представлена на рисунке 8.
Рисунок 8 – Схема САУ капельным орошением: 1 - блок задания; 2 - блок элементов И; 3 - логический блок; 4 - исполнительные механизмы; 5 - объект орошения; 6 - влагомеры
Программа, определяющая очередность и время орошения участков, вводится в блок задания и отработки программы 1. Сигнал разрешения полива участка поступает на блок элементов И и логический блок 3 сравнения, где сравниваются заданное и действительное значения влажности, измеряемые влагомерами 6. При дефиците влажности логическим блоком И вырабатывается команда на управление соответствующим исполнительным механизмом 4. Осушение земель производится в зонах избыточного увлажнения, а также в районах орошения из-за заболачивания орошаемых участков. Различают неуправляемый и управляемый режимы осушения. При неуправляемом режиме с осушаемой площади отводится максимально возможное количество воды, определяемое параметрами осушительной сети или мощностью осушительных насосных станций. Управляемый режим применяют для регулирования уровня грунтовых вод, обеспечивающего наиболее благоприятный водно-воздушный режим почвы.
2.9.6. АВТОМАТИЗАЦИЯ НАСОСНЫХ СТАНЦИЙ ДЛЯ МЕЛИОРАЦИИ
В мелиоративном хозяйстве насосные станции при орошении служат для запол-нения водохранилищ, подъема воды на командные отметки орошаемых полей, отвода сбросных оросительных и перекачки грунтовых вод, а при осушении - для перекачки сточных вод из каналов и коллекторов, а также для понижения уровня грунтовых вод. Широкий опыт автоматизации насосных станций в мелиорации показал высокую ее эффективность. Она обеспечивает оптимальный режим работы электронасосов, учет количества подаваемой воды, сокращает число аварий и повышает надежность работы. Срок окупаемости средств на автоматизацию не превышает 1…3 лет. Насосные станции в мелиорации характеризуются высокой подачей (до сотен тысяч кубометров в секунду) и большой мощностью (до тысяч киловатт). Для них обычно используют асинхронные короткозамкнутые электродвигатели мощностью до 300 кВт, рассчитанные на напряжение 380 В и 6, 3 кВ (при мощности свыше 100 кВт). Если потребная мощность превышает 300 кВт, то рекомендуется применять синхронные двигатели напряжением 6, 3 или 10 кВ. Схемы автоматизации насосных станций обеспечивают пуск и остановку электродвигателей, заливку насосов, управление запорными задвижками, предохранение напорных трубопроводов от гидравлических ударов, защиту оборудования при авариях, сигнализацию о нормальных и ненормальных режимах работы оборудования, контроль и измерение расхода, напора, горизонтов воды и т. п. Насосные станции в мелиорации снабжают специальными баками-аккумуляторами и вакуум-насосами для предварительной заливки основного насоса водой. При их отсутствии насосы ставят в заглубленных камерах ниже уровня водохранилища, а колено всасывающей трубы располагают выше уровня установки насоса. Для облегчения пуска электродвигателя на напорных трубопроводах ставят электрифицированные задвижки. Насос пускают при закрытой задвижке, тогда момент сопротивления воды минимальный. Задвижка открывается автоматически после разгона агрегата и установления заданного давления и также автоматически закрывается при отключении электронасоса. В качестве примера рассмотрим автоматизацию оросительной насосной станции с предварительной заливкой насоса водой и с управлением по уровню воды в водоприемном сооружении (рисунок 9, а, б), В режиме ручного управления переключатель SA ставят в положение Р и управляют работой оборудования при помощи кнопок SB1…SB6. В автоматическом режиме переключатель SA ставят в положение А, тогда схема работает в соответствии с временной диаграммой (рисунок 9, в). При понижении уровня в водоприемном сооружении до минимально допустимого значения замыкаются контакты SL2 датчика уровня и срабатывает реле KV1, которое включает электромагнитный клапан YА, установленный на заливной линии насоса. Насос через этот клапан заливается водой, а воздух в насосе выходит через реле залива КЗ. В конце заполнения насоса водой срабатывает реле залива КЗ и включает реле КV, которое, в свою очередь, вызывает включение магнитного пускателя КМ1 и реле времени КT. Магнитный пускатель запускает электродвигатель M1 привода насоса. При разгоне двигателя в напорном патрубке создается давление, от которого срабатывает реле давления KSP, включающее магнитный пускатель КМ2 и двигатель М2 на открытие задвижки на напорном трубопроводе. При полном открытии задвижки двигатель М2 выключается конечным выключателем SQ1 и загорается сигнальная лампа HL1. Одновременно переключаются контакты конечного выключателя SQ2-гаснет лампа HL2.
Рисунок 9 – Технологическая (а) и принципиальная электрическая (б) СУ оросительной насосной станцией и временная диаграмма (в) ее работы
Струйное реле KSН, реагируя на движение воды в трубопроводе, размыкает свои контакты в цепи реле времени КТ и отключает его. Отключение насоса происходит от датчика SL1 верхнего уровня воды в водонапорном сооружении. Его контакты размыкают цепи тока реле KV1, которое отключает электромагнит YA, реле KV2, а затем магнитный пускатель КМ1 и двигатель M1 насоса. Давление воды в напорном трубопроводе снижается до статического давления столба воды со стороны водохранилища. При этом давлении контакты реле давления KSP возвращаются в исходное положение и магнитный пускатель КМЗ включает двигатель М2, закрывающий задвижку. При полном закрытии задвижки контакты конечных выключателей SQ1 и SQ2 занимают исходное положение, контакты SQ2 отключают двигатель М2 Повторный автоматический пуск произойдет при снижении уровня воды до замыкания контактов SL2. Реле времени КТ предназначено для аварийного отключения насоса. Если, например при пуске, вода не поступает в водоприемное сооружение, то контакты струйного реле KSH остаются замкнутыми, реле времени включает аварийную сигнализацию НА. От реле KV1 отключаются реле KV2 и магнитный пускатель KM1 в результате останавливается электронасос M1. Аварийное реле включено до тех пор, пока обслуживающий персонал не нажмет кнопку деблокировки SB4. Одновременно отключится электромагнитный клапан YА. Такая же последовательность работы схемы на отключение насоса будет и при случайном перерыве подачи воды (пунктирные линии на рисунке 9, в).
2.9.7. АВТОМАТИЗАЦИЯ ПЕРЕКАЧКИ СТОЧНЫХ ВОД
Для откачки сточных, дренажных и хозяйственно-фекальных вод используют низконапорные (8…95 м) высокопроизводительные (16…9000 м3) канализационные электронасосы. Канализационным насосам свойствен ряд отличительных особенностей: незасоряющееся одно- трехлопастное уширенное рабочее колесо; самоуплотняющееся соединение насоса с напорным трубопроводом; отсутствие направляющих аппаратов. Обычно эти насосы имеют простую конструкцию. Они оборудованы кнопочной станцией дистанционного управления электронасосным агрегатом при помощи магнитных пускателей. В качестве примера рассмотрим САУ двухагрегатной водоотливной насосной станцией (рисунок 10). Вручную агрегаты включают и отключают с помощью кнопок SB1…SB4, в автоматическом режиме — с помощью электродных датчиков уровня SL1…SL4. Задвижки 1 и 5 с ручным приводом закрывают при ремонте насосов. При работе насосов они открыты. Обратный поток жидкости через неработающий насос 4, нагнетающий 3 и всасывающий 7 трубопроводы предотвращает клапан 2. Сточные воды и навозная жижа собираются в резервуар 6. По мере повышения их уровня замыкаются контакты датчиков SL1, SL2 и общий электрод 8 (заземлённая труба). Вначале от датчика SL2 включается один насос. Если приток сточных вод больше, чем производительность насоса, то уровень стоков повышается и датчиком SL3 включается второй электронасос. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1707; Нарушение авторского права страницы