|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Автоматизация систем водоснабжения и водоотведенияСтр 1 из 8Следующая ⇒
Российской Федерации Федеральное государственное бюджетное образовательное Учреждение высшего профессионального образования «Кузбасский государственный технический университет Имени Т.Ф. Горбачева»
Кафедра электропривода и автоматизации
Составитель Н. М. Шаулева Автоматизация систем водоснабжения и водоотведения Конспект лекций всех форм обучения
Рекомендованы учебно-методической комиссией направления 270800.62 «Строительство» в качестве электронного издания для использования в учебном процессе
Кемерово 2015 РАЗДЕЛ 1. ОСНОВЫ АВТОМАТИЗАЦИИ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ Основные понятия управления и регулирования
Автоматизация – применение на производстве приборов, устройств и средств вычислительной техники, позволяющих осуществить контроль и управление технологическим оборудованием без непосредственного участия человека. По уровню развития автоматизация технологических процессов подразделяется на частичную, комплексную и полную. При частичной автоматизации производится автоматическое управление (местное, дистанционное и телемеханическое) отдельными машинами, механизмами и установками, не участвующими в едином технологическом процессе и не имеющими связи и блокировок с другими технологическими процессами. При комплексной автоматизации все основные и вспомогательные процессы управляются системами автоматизированных машин и агрегатов по заранее разработанным программам и режимам. При этом роль оператора сводится к наблюдению за ходом технологического процесса, анализу его показателей, выбору режимов работы оборудования и заданию командных программ и установок автоматическим системам. При полной автоматизации система автоматических машин выполняет без непосредственного участия человека все операции технологического процесса, включая выбор и установку оптимальных режимов работы оборудования, роль человека сводится к контролю над работой управляющих устройств и к введению в эти устройства внешней информации. Достоинства автоматизации: 1) повышение экономической эффективности производства; 2) экономия материалов, энергии, сырья; 3) повышение безопасности труда. Основные законы регулирования Законом регулирования является функциональная зависимость, по которой входная величина регулятора преобразовывается в нём в выходную и поступает через исполнительное устройство на вход объекта управления в виде управляющей величины U. На практике используют различные законы регулирования, определяемые как требованиями технологического процесса, так и особенностями сигналов. Ниже рассмотрены основные законы регулирования, реализуемые регуляторами непрерывного действия по отклонению. 1. Пропорциональный закон реализуется пропорциональным регулятором (П-регулятором) и имеет вид
где В Качестве П-регулятора используют различные усилители, для которых Кп является коэффициентом усиления. 2. Пропорционально-интегральный закон
где Тu – постоянная времени интегрирования ПИ-регулятора, предназначенного для повышения точности системы. 3. Пропорционально – дифференциальный закон
где 4. Пропорционально - интегрально - дифференциальный закон
реализуется с помощью ПИД-регулятора, позволяющего одновременно повысить точность управления и улучшить динамику переходных процессов в системе.
Технические средства автоматизации (ТСА). Классификация ТСА ТСА обеспечивает отбор, передачу и обработку контрольной информации, выработку управляющих воздействий и реализацию их на объект управления. Все автоматические устройства состоят из элементов, каждый их которых выполняет одну простейшую операцию с сигналом – носителем информации. Классификация ТСА: 1. по выполняемым функциям различают: · датчики – преобразует контролируемые величины в сигналы. · реле – преобразовывает непрерывные сигналы в дискретные квантованием по уровню. · логические элементы – выполняют логические операции с сигналами. · усилители – увеличивают уровень или мощность сигнала. · регуляторы – вырабатывают управляющие воздействия, путем сравнения фактических величин с заданным значением. · исполнительные устройства – передают управляющее воздействие с регулятора на объект управления. 2. по роду используемой энергии: · электрические; · гидравлические; · пневматические; · механические; · комбинированные. Датчики – чувствительные элементы автоматических систем, преобразующие контролируемые (измеряемые) величины в выходные сигналы, удобные для передачи и дальнейшей обработки. Они являются источниками первичной информации и стоят всегда на первом месте в измерительной цепи. Датчики разделяют на параметрические и генераторные. В параметрических датчиках контролируемая величина преобразуется в один из параметров электрической цепи (активное сопротивление R, индуктивность L, емкость С). К параметрическим датчикам относятся: датчики сопротивления (потенциометрические, тензометрические, терморезисторные, фоторезисторные), датчики индуктивности и взаимоиндуктивности (индуктивные и индукционные, сельсины, вращающиеся трансформаторы). Генераторные датчики преобразуют контролируемую величину в ЭДС на выходе, т.е. вырабатывают электрическую энергию. К ним относятся термопары. По виду измеряемой величины, датчики делятся на датчики положения; датчики скорости; датчики температуры, давления, уровня, расхода и других физических величин.
Параметрические датчики Характерно наличие источника питания. Переменный резистор (потенциометр), состоящий из плоского или цилиндрического каркаса на который намотана тонкая проволока (из нихрома или констонтанта) и подвижного контакта, имеющего механическую связь с объектом.
Рис. 7. Схема потенциометрического датчика
Недостатки: скользящий контакт, ступенчатость перемещения контакта. Достоинства: простая конструкция и мощный сигнал.
Индуктивные датчики Для измерения сравнительно малых угловых или линейных механических перемещений и их преобразования в электрический сигнал переменного тока.
Рис. 8. Схема индуктивного датчика: 1 – подвижный якорь; 2 – ферромагнитный сердечник; 3 – катушка индуктивности.
Принцип действия основан на изменении индуктивности L в дросселе при изменении величины воздушного зазора δ (до 5 мм), в качестве нагрузки электромагнитное реле, переключающее цепи контроля, управления, защиты и др. Недостатки: работает только на переменном токе. Достоинства: простота устройства.
Генераторные датчики Термопары обеспечивают преобразование тепловой энергии в электрическую (ЭДС).
Измерение уровня жидкости Измерение уровня жидких и сыпучих тел относится к вспомагательным операциям. Технические средства, применяемые для измерения уровня жидкости называются уровнемерами. Приборы, предназначенные для сигнализации предельных значений, называются сигнализаторами уровня. При выборе уровнемера необходимо учитывать температуру, абразивные свойства, вязкость, электрическую проводимость, радиоактивность и химическую агрессивность среды. Кроме того учитываются свойства окружающей среды – огнеопасность, взрывоопасность. По принципу действия выделяют: 1. указательные стекла; 1. поплавковые; 2. гидростатические; 3. электрические; 4. ультразвуковые; 5. аккустические. Указательные стекла Работа основана на принципе сообщающихся сосудов. Указательное стекло соединяют с сосудом нижним концом. По изменению положения уровня жидкости в стеклянной трубке судят об изменении уровня в сосуде. Недостатки: предназначены для местного контроля уровня жидкости (длина не более 0, 5 м). Поплавковые уровнемеры Делятся на два вида: с поплавком постоянного погружения (рис. 17) и с поплавком переменного погружения (буйковые).
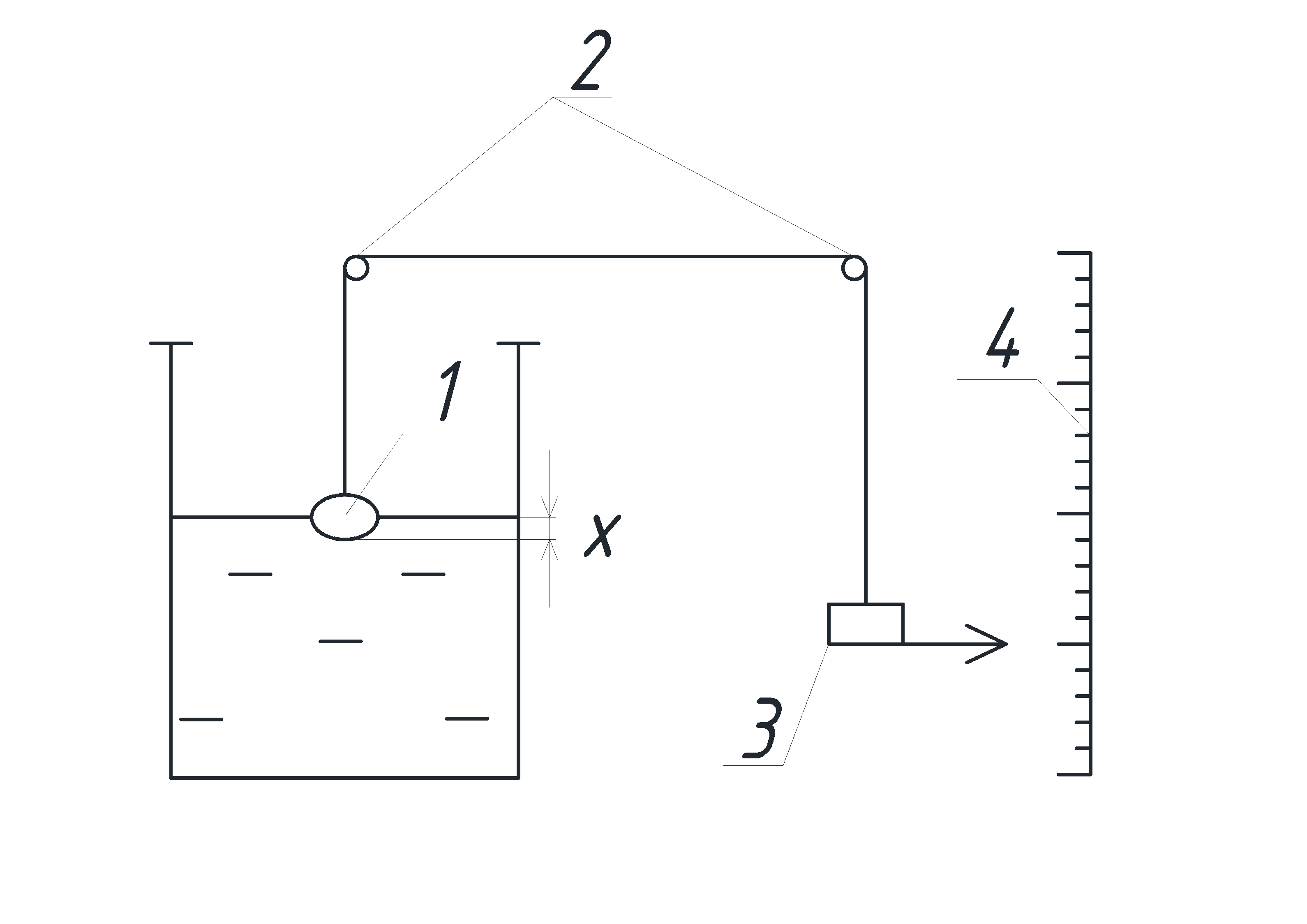
Рис. 17. Схема поплавкового уровнемера: 1 – поплавок; 2 – валы; 3 – грузик; 4 – шкала
Плотность поплавка 1 меньше плотности жидкости, в которую он погружен. На поплавок постоянного сечения действует выталкивающая сила F, которая по закону Архимеда определяется зависимостью F=ρ gSx. Сила, противодействующая выталкивающей, создается силой тяжести поплавка G, т.е. G=F=const. Степень погружения поплавка определяется как x=G/ρ gS=const. Следовательно, поплавок повторяет перемещение столба жидкости x=f(H). Такие уровнемеры используются для измерения небольших уровней и только для местного контроля. Недостаток: перевернутая шкала с нулем вверху. У буйковых уровнемеров плотность поплавка больше плотности жидкости. Буек изготавливается из металла и имеет цилиндрическую форму. Для удержания в сосуде с жидкостью буек сверху придавливается грузом или пружиной. Перемещение буйка преобразуется в выходной сигнал с помощью электрических и пневматических преобразователей. Недостатки: большая металлоемкость, недостаточная надежность и точность из-за наличия кинематических узлов, невозможность применения в вязких и кристаллизующихся средах. Применяется в однородных, в том числе агрессивных средах, в сосудах, находящихся при высоких статических давлениях до 25 МПа, при высоких температурах до +450. Диапазон измерения 0, 2÷ 16 м. Класс точности 1, 5.
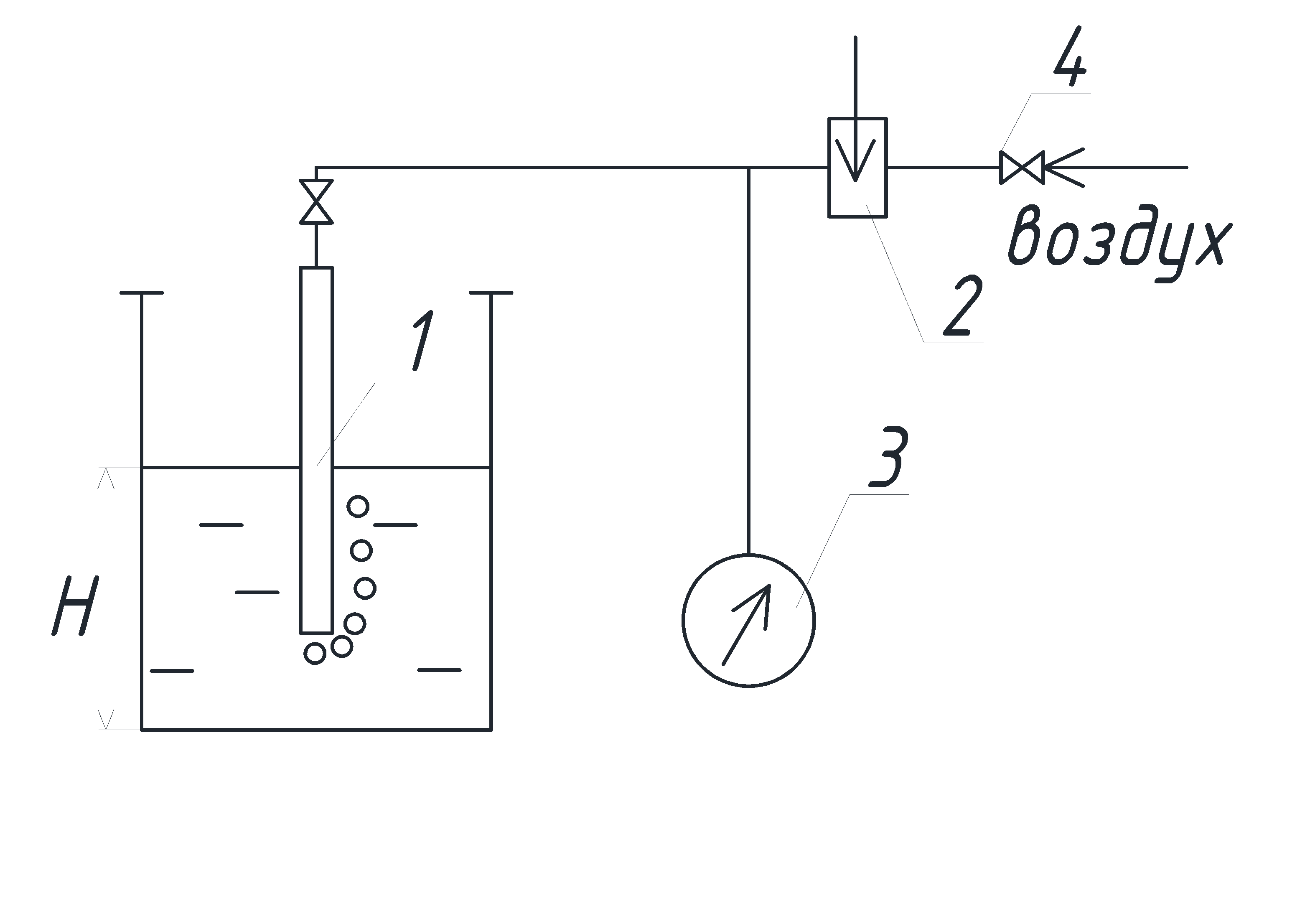
Гидростатические уровнемеры Измерение уровня жидкости с постоянной плотностью сводится к измерению давления, создаваемого столбом жидкости, т.е. Р=ρ gH, где Н – высота столба жидкости. Гидростатические уровнемеры подразделяются на пьезометрические и с непосредственным измерением столба жидкости. 1. Пьезометрические – с непрерывным продуванием воздухом или газом (рис. 18). Применяют для измерения уровня разнообразных жидкостей в том числе агрессивных в сосудах, находящихся под давлением и в открытых резервуарах.
Рис. 18. Схема пьезометрического уровнемера
Принцип действия: в трубку 1 подается сжатый воздух через ротаметр 2. В момент равенства давлений воздуха, подаваемого в трубку, и давления, создаваемого столбом жидкости высотой Н, из трубки начинают выходить пузырьки воздуха с частотой 1-3 пузырька в секунду. Показания снимаются по вторичному прибору – манометру 3. Недостатки: требуется ручная корректировка; сосуд должен быть прозрачный; удаленность приборов не более 30 м. 2. Гидростатические с непосредственным измерение столба жидкости (с дифманометром) (рис.19).
Рис. 19. Схема уровнемера с дифманометром
Высота столба жидкости в первом колене дифманометра 3 поддерживается постоянной, за счет уравнительного сосуда 2, который заполняется той же жидкостью, что и сосуд 1. Вентиль 4 после выравнивания уровней в сосудах 1и 2 необходимо закрыть. При изменении уровня жидкости в сосуде 1, высота столба жидкости во втором колене изменяется, соответственно изменяется и давление. По величине перепада давления судят об уровне жидкости. Электрические уровнемеры В электрических уровнемерах положение уровня жидкости преобразуется в какой-либо электрический сигнал. Наиболее распространены омические и емкостные уровнемеры. Омические уровнемеры Омические уровнемеры (рис. 20) используют для сигнализации и поддержания в заданных пределах уровня электропроводных жидкостей.
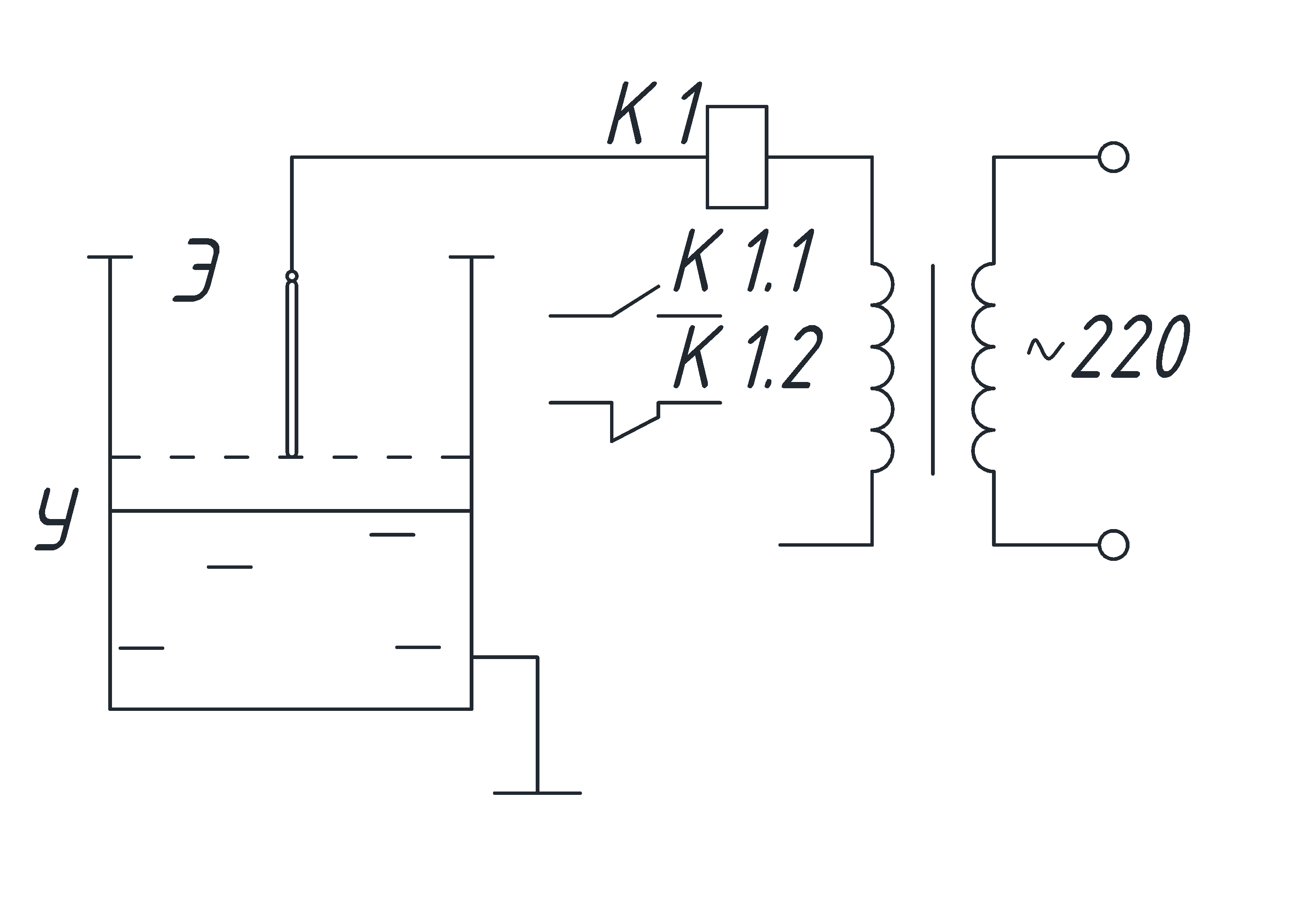
Рис. 20. Схема омического уровнемера
Чувствительным элементом является электрод Э, который располагается на определенном уровне в измерительном сосуде. Принцип действия основан на замыкании электрической цепи источника питания через контролируемую среду, представляющую собой участок электрической цепи с определенным омическим сопротивлением. В эту цепь включается электромагнитное реле К1, который своими контактами К1.1 и К1.2 переключает необходимые цепи. В качестве электродов используют металлические стержни, а для агрессивных жидкостей – угольные электроды. Омические уровнемеры нельзя использовать в вязких и кристаллизующихся средах. Емкостные уровнемеры Преобразователь емкостного уровнемера представляет собой электрический конденсатор, емкость которого зависит от уровня жидкости. Принцип действия основан на использовании диэлектрических свойств контролируемой среды. Конденсатор может быть выполнен в виде цилиндрических стержней (рис. 21, а) или пластин, расположенных параллельно друг к другу (рис. 21, б) и включенныех в схему измерительного моста. Емкость преобразователя равна сумме емкостей двух участков:
C=Ch+CH-h,
где Сh – емкость участка, погруженного в жидкость с диэлектрической проницаемостью (ε ж); СH-h – емкость участка, находящегося в среде с диэлектрической проницаемостью среды (ε ср).
Рис. 21. Схема емкостного уровнемера
В них используются диэлектрические свойства среды. Достоинства: нет движущихся частей; возможность измерения уровня в сосудах, находящихся под давлением и разрежением, при высокой и низкой температуре, почти во всех чистых и агрессивных жидкостях, кроме вязких и кристаллизующихся сред. В пьезоэлектрических ИПД действие основано на зависимости поляризованного заряда или резонансной частоты пьезокристалла ( кварц, турмалин) от давления.
Таблица 1 Автоматические регуляторы Классификация автоматических регуляторов 1. По роду энергии, используемой для приведения в действия: а) пневматические; б) электрические; в) гидравлические; г) колебательные. 2. По назначению различают регуляторы расхода, давления, температуры, уровня, соотношения параметров. 3. По способу действия: непосредственного или прямого действия и косвенного действия. В регуляторах прямого действия усилие, необходимое для перемещения регулируемого органа, создается чувствительным элементом. Регуляторы косвенного действия используют энергию постороннего источника. 4. По характеру изменения скорости регулирующего воздействия: с постоянной скоростью перемещения РО и с переменной скоростью перемещения РО. 5. По характеру действия различают регуляторы непрерывного (интегральные) и прерывистого действия. Интегральные: И-регуляторы (астатические), пропорциональные П-регуляторы (статические) и изодромные ПИ-регуляторы. Позиционные: импульсные и релейные. Интегральными называют регуляторы, у которых при отклонении регулируемого параметра от заданного значения РО перемещается в одном направлении в пределах рабочего хода до тех пор, пока регулируемый параметр снова не примет заданного значения. Пропорциональными называются регуляторы, у которых величина перемещения РО пропорциональна отклонению регулируемого параметра, т.е. каждое значение регулируемого параметра соответствует определенное положение РО. Изодромные регуляторы обладают одновременно свойствами П-регуляторов и И-регуляторов.
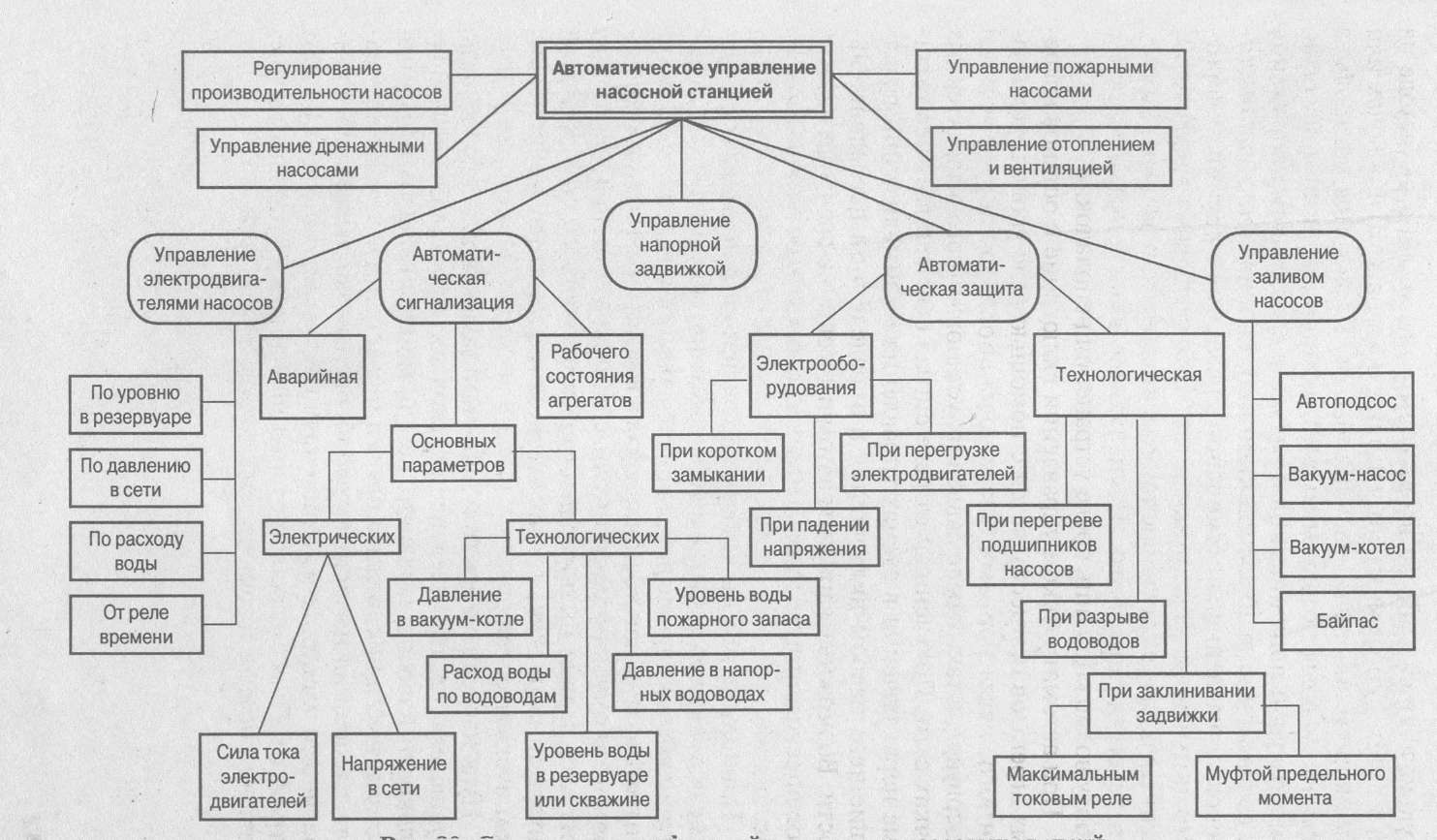
И водоотведения Автоматическое управление насосами в системах водоснабжения Насосные станции по оборудованию и протекающим в них технологическим процессам сравнительно легко поддаются автоматизации. Процессы, связанные с пуском, остановом и контролем за состоянием насосно-силового оборудования, осуществляются в строго установленной последовательности автоматически, без непосредственного участия обслуживающего персонажа. На насосных станциях автоматически выполняются следующие операции: • пуск и останов агрегатов с выдержкой по времени как перед пуском после получения импульса управления, так и между отдельными операциями; • включение одного или нескольких насосных агрегатов в установленной последовательности, причем включение производится либо на полное напряжение (прямой пуск), либо на пониженное с последующим включением на полное напряжение после установленной выдержки (ступенчатый пуск); • создание и поддержание необходимого разрежения во всасывающем трубопроводе и насосе перед пуском, если он не находится под заливом; • открытие и закрытие задвижек на трубопроводах в определенном порядке при пуске и останове насосов; • контроль за выполнением установленного режима при пуске, работе и останове насосов, отключение работающего насоса при нарушении режима его работы и включение резервного насоса; • передача сигналов о работе насосных агрегатов и аварийных ситуациях на диспетчерский пункт; • защита насосных агрегатов при перегреве подшипников, вследствие работы насоса без залива, при перегрузке приводного электродвигателя и т. п.; • отопление и вентиляция станций, их охрана от проникновения посторонних лиц, а также включение и отключение дренажных насосов. На насосных станциях может проводиться автоматическое регулирование напора и производительности агрегатов. Оно может осуществляться либо на входе воды в насос, либо на выходе из него путем дросселирования задвижками на трубопроводах или изменением скорости вращения насоса. Проводятся контроль за давлением воды во всасывающей и напорной линиях насосов, температурой подшипников и сальников, наличием напряжения на вводных шинах насосной станции и на шинах щита автоматического управления, а также защита насосных агрегатов от короткого замыкания, перегрузки и т.п. При появлении перечисленных недопустимых отклонений срабатывает реле защиты, выключая агрегаты из работы. Последующее включение агрегатов в работу возможно лишь после устранения неполадок. При автоматическом управлении включение и останов насосных агрегатов осуществляется с помощью реле уровня, установленного, например, над баком водонапорного сооружения или резервуара, а также реле давления, установленного в характерных точках сети. Полученный от реле сигнал обеспечивает необходимые переключения в схемах управления и сигнализации, вследствие чего насосы включаются в определенной последовательности. Возможные варианты автоматического включения насосов и осуществления их залива перед пуском в работу показаны на рис. 46.
Рис. 46. Схема основных функций автоматики насосных станций Автоматическое управление насосами в системах и водоотведения
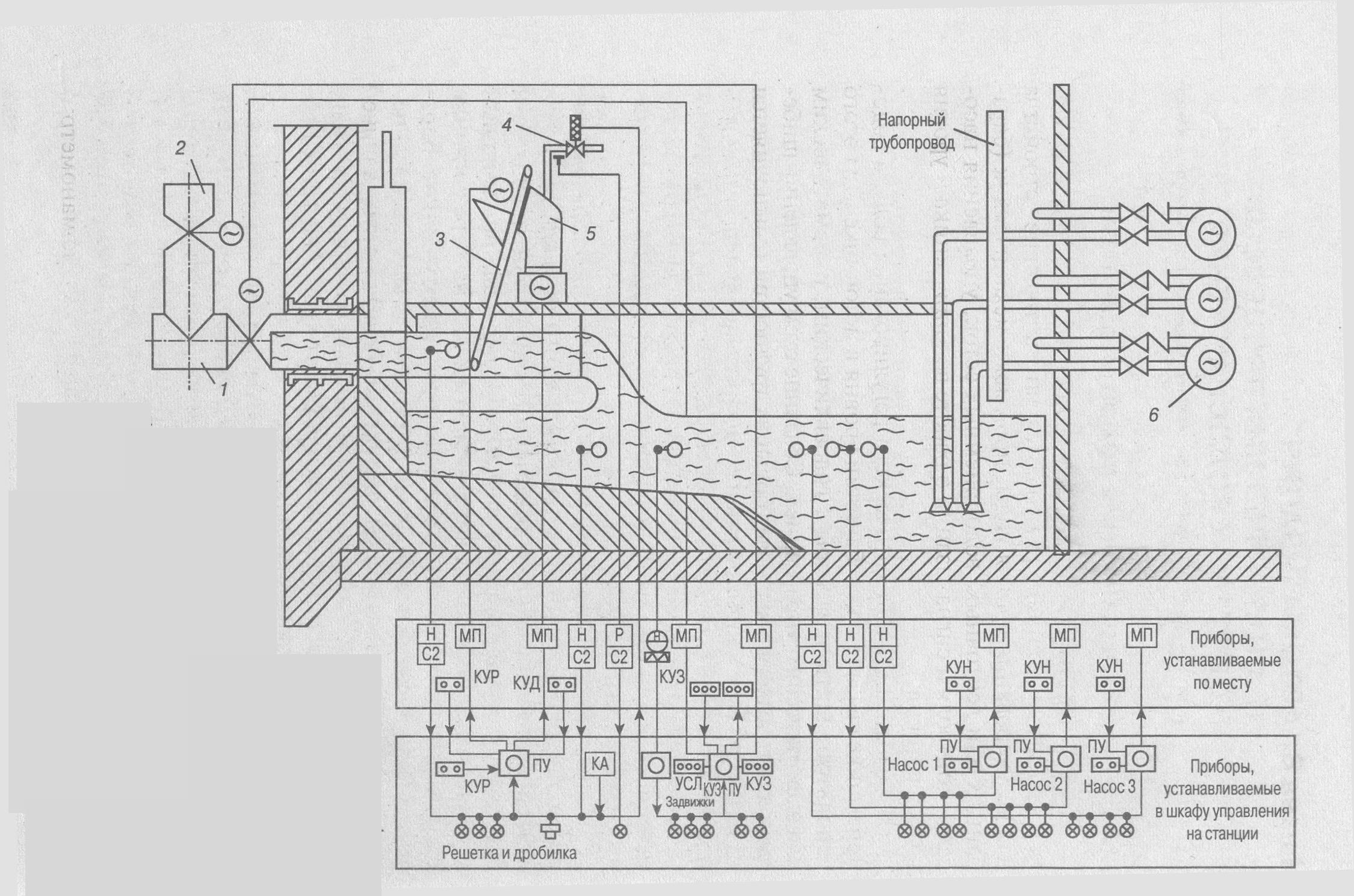
Одним из основных назначений систем автоматического управления канализационных станций является поддержание в заданных пределах уровня жидкости в приемных резервуарах. Электродные датчики, используемые для контроля залива насосов, широко применяются также для контроля наличия воды в трубопроводах при эксплуатации автоматизированных насосных станций. Схема автоматического управления насосной станцией с тремя агрегатами приведена на рис. 47.
Рис. 47. Схема автоматического управления насосной станцией: 1– подводящий трубопровод; 2 – обводной аварийный трубопровод; 3 – механизированная решетка; 4 – соленоидный клапан; 5 – молотковая дробилка; 6 – насосы; КУР – кнопка управления решеткой; КУД – кнопка управления задвижкой; КУЗ – кнопка управления задвижкой; КУН – кнопки управления насосами; ПУ – переключатель управления; ДСУ – датчик сельсинного устройства; УСП – универсальный сельсинный приемник; КА – кнопка аварийная; МП – магнитный пускатель
Пуск первого насоса происходит при подъеме уровня жидкости в приемном резервуаре до положения, соответствующего наполнению подводящего коллектора до 80%. При дальнейшем повышении уровня последовательно включаются второй и третий насосы. Их отключение происходит в обратном порядке. Пуск и отключение насосов производятся с помощью реле уровня и реле времени. При аварии и выходе из строя основного оборудования происходит автоматическое переключения подводящего коллектора на обводной с помощью включенных в схему управления задвижек и шиберов. Схема такой автоматизированной насосной станции отличается высокой надежностью и дает возможность управления без обслуживающего персонала, что позволяет снизить эксплуатационные расходы на 15%, а расход электроэнергии — на 9, 3%.
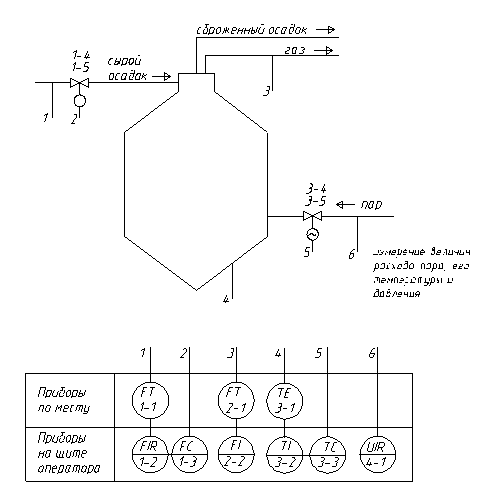
Автоматизация метантенка На городских станциях аэрации сбраживание осадков производится в метантенках с помощью «острого» пара. Эффективная эксплуатация этих сооружений требует обязательного применения автоматических устройств для поддержания в заданных пределах температуры сбраживания осадка и его перемешивания (t=45˚ C). Большое значение имеет также автоматизация контроля ряда параметров процесса, к которым относятся расходы сырого и сброженного осадков, уровень осадка в метантенке, давление и расход газа, pH и др. На рис. 55 представлена функциональная схема автоматизации метантенка. При автоматическом управлении подогревом осадка измеритель температуры помещается в центре метантенка. С помощью этого датчика сигнал об изменении температуры осадка передается на интеллектуальный преобразователь температуры МЕТРАН-280. При температуре ниже заданного значения автоматически включается насос перемешивания осадка и задвижка на его напорной линии. Одновременно открывается запорно-регулирующий клапан на паропроводе и во всасывающий патрубок насоса подается пар для подогрева осадка. Перемешивание осадка производится одновременно с его подогревом. После увеличения температуры до заданного значения термопреобразователь подает сигнал, вызывающий отключение паропровода, остановку насоса и закрытие напорной задвижки. Для измерения величин расхода пара, его температуры и давления используется расходомер.
Рис. 55. Функциональная схема автоматизации метантенка Российской Федерации Федеральное государственное бюджетное образовательное Учреждение высшего профессионального образования «Кузбасский государственный технический университет Имени Т.Ф. Горбачева»
Кафедра электропривода и автоматизации
Составитель Н. М. Шаулева Автоматизация систем водоснабжения и водоотведения Конспект лекций всех форм обучения
Рекомендованы учебно-методической комиссией направления 270800.62 «Строительство» в качестве электронного издания для использования в учебном процессе
Кемерово 2015 Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 2848; Нарушение авторского права страницы
 ,
,  – разница между заданными сигналами и источником обратной связи; U – выходной сигнал регулятора; Кп – коэффициент передачи регулятора.
– разница между заданными сигналами и источником обратной связи; U – выходной сигнал регулятора; Кп – коэффициент передачи регулятора. ,
,  ,
,  – постоянная времени дифференцирования ПД-регулятора, предназначенного для улучшения динамики системы.
– постоянная времени дифференцирования ПД-регулятора, предназначенного для улучшения динамики системы.

 .
.