|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механизмы уменьшения усилий на рычагах управления.
Глава 12 Механика полёта
Введение
Механика полёта изучает силы, действующие на самолёт в полёте, и реакцию самолёта на действие этих сил. Для того чтобы самолёт двигался равномерно и прямолинейно должны быть соблюдены следующие условия: - сумма всех сил, направленных вверх, должна быть равна сумме всех сил, направленных вниз, - сумма всех сил, направленных вперёд, должна быть равна сумме всех сил, направленных назад, и - сумма всех моментов должна быть равна нулю. При соблюдении этих условий самолёт будет находиться в состоянии равновесия.
Равномерный прямолинейный горизонтальный полёт.
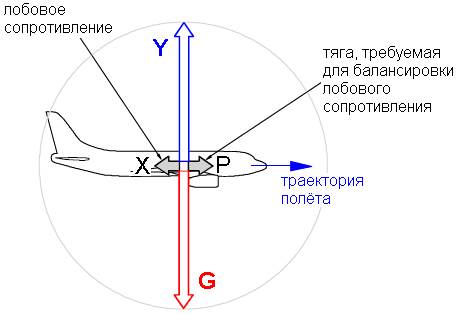
В прямолинейном горизонтальном полёте на самолёт действуют четыре силы – подъёмная сила, сила тяжести, тяга и лобовое сопротивление.
Сила тяжести приложена в центре тяжести и направлена вертикально вниз. Силу тяжести также называют весом самолёта.
Подъёмная сила приложена в центре давления (СР), расположена в плоскости симметрии самолёта и направлена под прямым углом к траектории полёта (направлению набегающего потока воздуха). В данной главе примем, что тяга направлена вперёд по направлению траектории полёта (хотя это не совсем верно), а лобовое сопротивление – в противоположную сторону. Условием равномерного горизонтального полёта является равновесие данных сил. Подъёмная сила должна быть отрегулирована для соответствия текущему весу самолёта, а тяга двигателя подобрана для компенсации лобового сопротивления. Аэродинамическое качество (отношение подъёмной силы к лобовому сопротивлению) у современных самолётов находится в диапазоне от 10 до 20. То есть подъёмная сила в 10 – 20 раз больше лобового сопротивления.
Линии действия сил тяги и лобового сопротивления находятся вблизи друг друга, поэтому момент, создаваемый этой парой сил очень мал и в данном случае не рассматривается. Расположение центров давления и тяжести меняется в процессе полёта. Центр давления перемещается вперёд при увеличении угла атаки, а центр тяжести перемещается из-за выработки топлива, перемещения пассажиров и грузов по салону. Обычно, центр давления находится впереди центра тяжести на малых скоростях, давая кабрирующий момент, и сзади центра тяжести на больших скоростях, давая пикирующий момент.
Горизонтальное оперение.
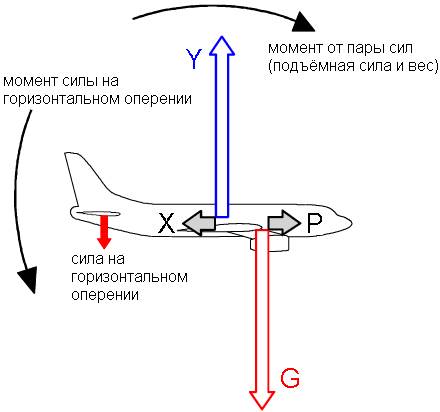
Горизонтальное оперение (стабилизатор и руль высоты) предназначено для создания силы необходимой для балансировки моментов тангажа, возникающих от перемещения центров давления и тяжести.
В нормальном крейсерском полёте центр давления находится позади центра тяжести, поэтому горизонтальное оперение создаёт силу, направленную вниз (см. рисунок).
Равновесие сил.
Сила на горизонтальном оперении (ГО) вычитается или прибавляется к подъёмной силе. Если сила ГО направлена вниз, то Y - FГО = G. Если сила ГО направлена вверх, то Y + FГО = G.
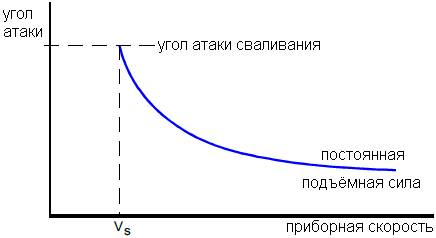
Для горизонтального полёта при неизменном весе самолёта требуется поддержание постоянной подъёмной силы. Если скорость полёта при этом не меняется, то полёт осуществляется на подобранном постоянном угле атаки. Если же скорость меняется, то для сохранения постоянства подъёмной силы угол атаки должен изменяться. Подъёмная сила пропорциональна квадрату скорости и прямо пропорциональна углу атаки. Зависимость потребного угла атаки от приборной скорости при условии постоянства подъёмной силы показана на рисунке.
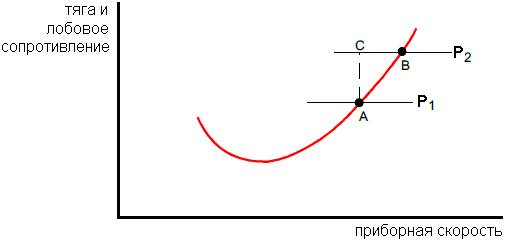
Для сохранения скорости в горизонтальном полёте тяга должна быть равна лобовому сопротивлению самолёта. Если скорость самолёта больше наивыгоднейшей, то лобовое сопротивление самолёта увеличивается при увеличении скорости.
Чтобы лететь со скоростью, обозначенной на рисунка точкой А, требуется тяга Р1, а для полёта в точке В – тяга Р2. Если тягу увеличить от Р1 до Р2, когда самолёт находится в точка А, то тяга станет больше лобового сопротивления, самолёт начнёт разгоняться пропорционально избытку тяги АС, пока не достигнет точки В, где тяга и сопротивление вновь придут в равновесие. Если тяга Р2 – максимально возможная, то скорость в точке В является максимальной скоростью, которую можно достичь в горизонтальном полёте.
Прямолинейный равномерный набор высоты.
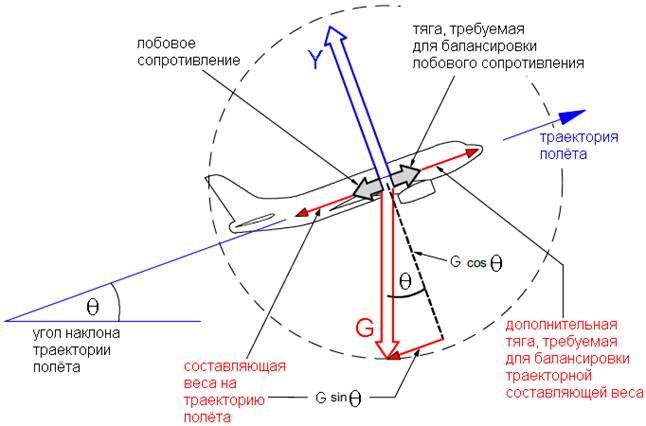
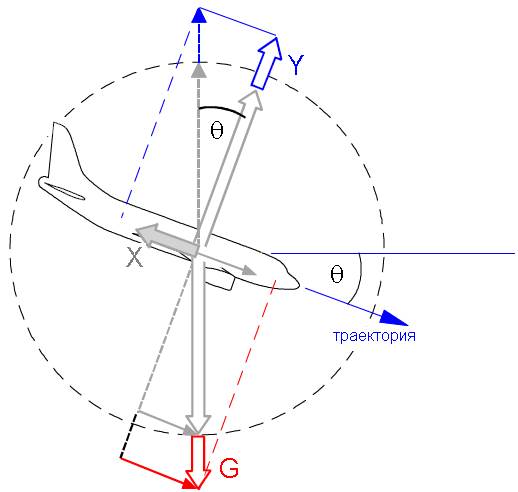
Рассмотрим самолёт в прямолинейном равномерном наборе высоты с углом наклона траектории полёта q. На самолёт будет действовать: подъёмная сила, перпендикулярно траектории; тяга и лобовое сопротивление – параллельно траектории; и вес самолёта – вертикально вниз.
Вес самолёта разложен на две составляющие относительно траектории полёта: нормальную (перпендикулярную) составляющую G cosq, противодействующую подъёмной силе, и продольную составляющую G sinq, действующую в том же направлении, что и лобовое сопротивление. Условия равновесия сил: тяга должна быть равна сумме лобового сопротивления и траекторной составляющей веса самолёта, а подъёмная сила должна быть равна нормальной составляющей веса. Y = G cosq; P = X + G sinq. Чем больше угол наклона траектории, тем меньше потребная подъёмная сила, и тем больше потребная тяга из-за возрастающей траекторной составляющей веса. При равномерном прямолинейном наборе высоты подъёмная сила меньше веса самолёта, поскольку она уравновешивает только нормальную к траектории составляющую веса. (При вертикальном наборе высоты подъёмная сила равна нулю). Оставшаяся часть веса самолёта уравновешивается тягой двигателей. Потребная тяга для равномерного набора высоты больше, чем лобовое сопротивление на величину продольной составляющей веса самолёта. sinq = (P – X) / G. Возможности самолёта по набору высоты зависят от располагаемого избытка тяги (разницы между располагаемой тягой и лобовым сопротивлением). Чем меньше лобовое сопротивление при заданной тяге, тем больше угол набора высоты. Уборка закрылков уменьшает лобовое сопротивление, что приводит к увеличению угла (градиента) набора высоты.
Угол набора высоты
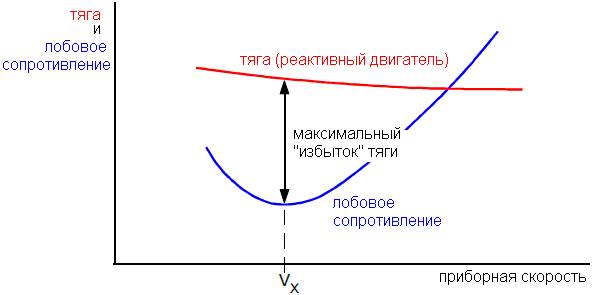
Угол набора высоты зависит от «избытка тяги» (P – X) и веса самолёта. При изменении скорости полёта тяга двигателей и лобовое сопротивление изменяются, и максимальный избыток тяги существует только на определённой скорости. Эта скорость называется скоростью максимального угла набора высоты VX.
Кривые зависимости тяги и лобового сопротивления в советских учебниках называются кривыми Жуковского. Зависимость тяги от скорости зависит от типа двигателя. Тяга реактивного двигателя изменяется не очень сильно, поэтому VX будет близка к наивыгоднейшей скорости VMD. У самолётов оснащённых поршневыми двигателями VX обычно меньше, чем VMD.
Влияние веса, высоты и температуры.
При заданной приборной скорости полёта, лобовое сопротивление не зависит от высоты и температуры. Увеличение веса самолёта влечёт увеличение лобового сопротивления, что уменьшает избыток тяги, а, следовательно, и угол набора высоты. Располагаемая тяга двигателя уменьшается с ростом высоты полёта и увеличением температуры, что, соответственно, уменьшает избыток тяги. Таким образом, увеличение веса, высоты и температуры уменьшают угол набора высоты.
Равномерное снижение с работающими двигателями.
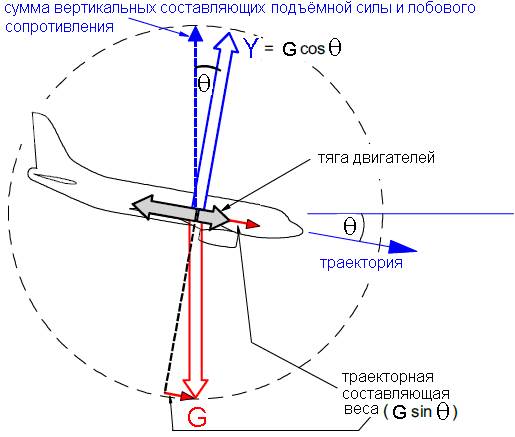
На рисунке изображены силы, действующие на самолёт при установившемся снижении с работающими двигателями.
Сила веса разложена на две составляющие. Составляющая G cosq действует перпендикулярно траектории и балансируется подъёмной силой. Другая составляющая G sinq действует вдоль траектории вперёд. Сумма этой составляющей и тяги балансируется лобовым сопротивлением. Если не меняя тягу увеличить угол снижения, то увеличенная продольная составляющая веса вызовет увеличение скорости самолёта. Это, в свою очередь, приведёт к росту лобового сопротивления, которое, в конечном счёте, сбалансирует прирост составляющей веса и равновесие восстановится при большей скорости и большем угле снижения. Если уменьшить тягу двигателей, то для сохранения приборной скорости необходимо увеличить угол снижения, чтобы компенсировать уменьшение тяги увеличением продольной составляющей веса. На снижении подъёмная сила меньше, чем вес, поскольку она балансирует только перпендикулярную (нормальную) составляющую веса G cosq. На снижении тяга меньше лобового сопротивления, поскольку продольная составляющая веса G sinq действует в том же направлении, что и тяга.
Аварийное снижение.
В случае разгерметизации салона на большой высоте необходимо как можно быстрее снизиться. Вертикальную скорость снижения можно увеличить с помощью: - уборки режима двигателей на малый газ; - увеличения лобового сопротивления с помощью воздушных тормозов и/или выпуска шасси (на скорости, не превышающей ограничения по выпуску шасси VLO); - увеличения скорости за счёт увеличения угла снижения. Скорость в полётной конфигурации можно увеличить вплоть до VMO(MMO), а при выпущенных шасси – вплоть до максимальной с выпущенными шасси (VLE). В целом, вертикальная скорость снижения с выпущенными шасси будет больше за счёт большего лобового сопротивления, но если максимальная скорость выпуска шасси (VLО) намного меньше крейсерской скорости полёта, то возможно придётся потратить некоторое время для торможения, прежде чем начать снижение. Это увеличит время пребывания на большой высоте и может сделать выпуск шасси неэффективной процедурой. Если шасси не выпускать, то процедура аварийного снижения – убрать режим двигателей, выпустить воздушные тормоза и в крутом снижении увеличить скорость до VMO(MMO). На большой высоте первым ограничением будет число Маха (MMO), но по мере снижения приборная скорость будет увеличиваться и на определённой высоте угол снижения надо будет уменьшить, чтобы не допустить превышения приборной скорости VMO. Поскольку вертикальная скорость аварийного снижения довольно большая, то вывод в горизонтальный полёт следует начинать заранее, чтобы не допустить большой перегрузки или просадки ниже заданной высоты.
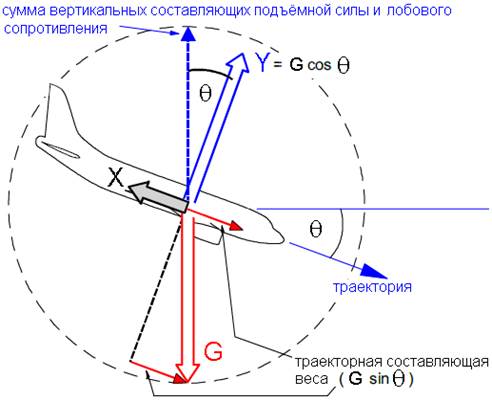
Планирование При планировании с выключенными двигателями единственной силой, противостоящей лобовому сопротивлению, является траекторная составляющая веса. На самолёт действуют только три силы – подъёмная сила, вес и лобовое сопротивление.
На рисунке показаны силы, действующие на самолёт в установившемся планировании без двигателей. Продольная (траекторная) составляющая веса (G sinq) зависит от угла наклона траектории q. Чем больше угол снижения, тем она больше. Эта составляющая должна уравновешивать лобовое сопротивление, чтобы скорость планирования была постоянной. То есть, если уменьшить лобовое сопротивление и не менять подъёмную силу, то баланс сил будет достигнут при меньшем угле снижения.
Угол снижения на планировании без двигателей.
Угол наклона траектории на планировании зависит только от аэродинамического качества. Чем выше качество, тем меньше угол планирования. Самолёт имеет максимальное качество на наивыгоднейшем угле атаки, что соответствует полёту на наивыгоднейшей скорости (VMD). При отклонении скорости от наивыгоднейшей в большую или меньшую сторону, угол снижения будет увеличиваться. Максимальная дальность планирования достигается при планировании на наивыгоднейшей скорости.
Влияние веса
Максимальное аэродинамическое качество не зависит от веса. Если самолёт снижается на наивыгоднейшем угле атаки, то угол снижения и дальность планирования будут одинаковыми независимо от веса. При изменении веса меняется только наивыгоднейшая скорость (VMD). С увеличением веса она возрастает. Как показано на рисунке, увеличение веса приводит к росту траекторной составляющей, тянущей самолёт вперёд. Эта сила балансируется возросшим лобовым сопротивлением на увеличенной скорости полёта. Соответственно увеличивается и подъёмная сила для балансировки нормальной составляющей веса. При большем весе самолёт пролетит без двигателей ту же дистанцию, но на большей скорости и, соответственно, с большей вертикальной скоростью.
Влияние ветра
Дальность планирования с выключенными двигателями определяется по следующей формуле: Дальность = Потеря высоты * Аэродинамическое качество. Эта формула верна только при отсутствии ветра. При ветре путевая скорость самолёта меняется, поэтому дальность планирования тоже изменяется. Встречный ветер уменьшает, а попутный – увеличивает дальность планирования.
Влияние конфигурации самолёта
Максимальное аэродинамическое качество самолёт имеет в полётной конфигурации. Выпуск закрылков, интерцепторов, шасси и т. п. уменьшает качество, что увеличивает угол снижения и уменьшает дальность планирования.
Вертикальная скорость планирования
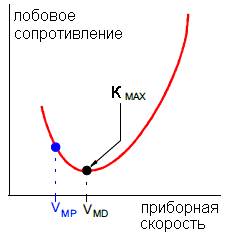
Минимальная вертикальная скорость планирования достигается на экономической скорости (скорости минимальной потребной мощности) (VMP). Выполняя полёт на экономической скорости, самолёт может продержаться в воздухе наибольшее время.
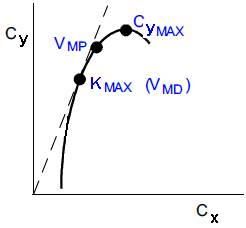
Как видно из рисунка, экономическая скорость(VMP) меньше, чем наивыгоднейшая (VMD). Направление и скорость горизонтальной составляющей ветра не влияют на вертикальную скорость планирования. На следующем рисунке изображена поляра самолёта, с нанесёнными на неё точками, соответствующие режимам полёта на наивыгоднейшей скорости, экономической скорости и полёта на максимальном СУ.
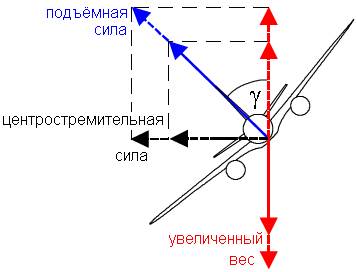
Разворот в горизонтальном полёте.
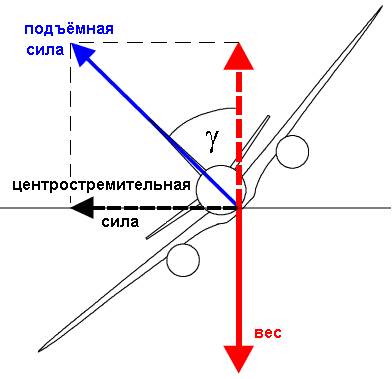
Для того чтобы самолёт менял направление движения, на него должна действовать внешняя сила, направленная в сторону разворота. Такая сила называется центростремительной. При кренении самолёта вектор подъёмной силы наклоняется в сторону. Горизонтальная составляющая подъёмной силы заставляет самолёт разворачиваться в сторону крена.
Если при создании крена угол атаки самолёта не увеличить, то вертикальной составляющей подъёмной силы будет недостаточно для балансировки веса и самолёт начнёт снижаться. Поэтому для сохранения высоты полёта, по мере увеличения крена, угол атаки самолёта должен быть увеличен, чтобы вертикальная составляющая подъёмной силы уравновешивала вес самолёта. Заданная величина крена определяется величиной требуемой центростремительной силы для выполнения разворота.
Влияние веса на выполнение разворотов.
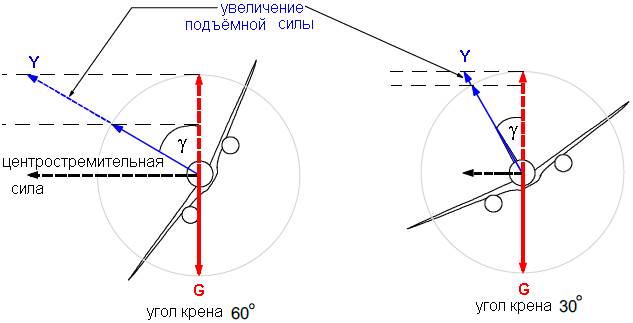
В установившемся горизонтальном развороте вертикальная составляющая подъёмной силы балансирует вес, а горизонтальная - является центростремительной силой. Если не изменяется истинная скорость и угол крена, то радиус разворота не зависит от веса самолёта.
Если вес самолёта будет больше, то больше будет потребная вертикальная составляющая подъёмной силы. При этом в той же пропорции увеличится и центростремительная сила. Поэтому радиус разворота зависит только от угла крена и истинной скорости полёта. Увеличение веса требует увеличения подъёмной силы. Если скорость полёта не менять, то для этого потребуется увеличить угол атаки, что грозит выходом на ограничение по углу атаки.
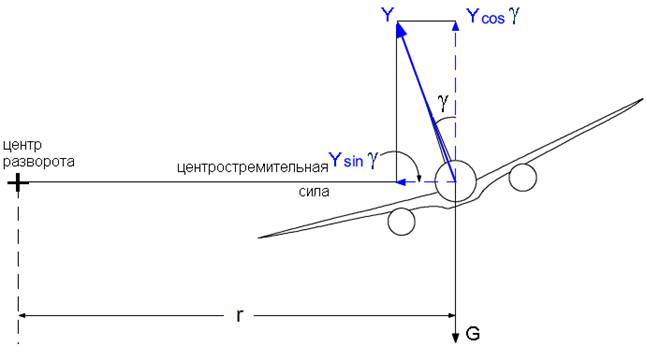
Условия установившегося горизонтального разворота
Условия равновесия в горизонтальном развороте: Y cos g = G; Y sin g = G V2 / r g. Где Y - подъёмная сила в Ньютонах, G – вес в Ньютонах, V – истинная скорость в м/с, r – радиус разворота в м, g - угол крена и g – ускорение свободного падения 9.81м/с2. Разделив второе уравнение на первое получим: tg g = V2 / r g. Это основное уравнение, связывающее скорость, крен и радиус разворота. Знание двух параметров позволяет определить третий. Радиус разворота = V2 / g tg g Угловая скорость разворота (в радианах за секунду) = V / r = g tg g / V Чтобы получить угловую скорость в градусах за секунду, нужно результат в рад/с умножить на 57.3. В англоязычных учебниках есть понятие Rate Number (фиксированным угловым скоростям разворота присвоены порядковые номера). Rate 1 означает разворот на 180° за минуту (3 градуса в секунду). Rate 2 означает разворот на 360° за минуту (6 градусов в секунду).
Угловая скорость разворота = истинная скорость / радиус разворота. Например: скорость 150 узлов (77 м/с), радиус 1480 м. Угловая скорость равна 77 / 1480 = 0. 052 рад/с * 57.3 = 3 град/с (Rate 1)
- при постоянной истинной скорости увеличение угла крена уменьшает радиус разворота и увеличивает угловую скорость разворота. - для поддержания постоянной угловой скорости разворота при увеличении скорости полёта требуется увеличивать угол крена. - при развороте с постоянным креном увеличение скорости влечёт за собой увеличение радиуса и уменьшение угловой скорости разворота. Для сохранения постоянной угловой скорости разворота заданная величина крена зависит от истинной скорости полёта.
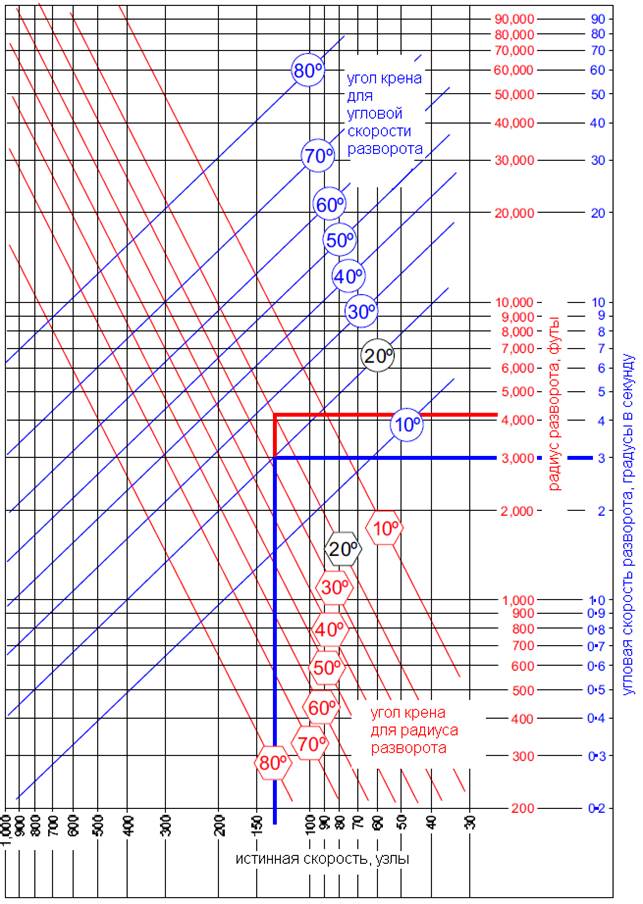
Радиус и угловая скорость разворота
Радиус и угловая скорость разворота зависят от двух переменных: - угол крена (g). Увеличение крена уменьшает радиус и увеличивает угловую скорость, но требует увеличения перегрузки (угла атаки) для сохранения высоты полёта. - истинная скорость (TAS). Уменьшение скорости уменьшает радиус и увеличивает угловую скорость разворота, при этом не требуется увеличение перегрузки для сохранения горизонтальности полёта (хотя требуется увеличение угла атаки). Радиус разворота при заданном угле крена зависит от квадрата скорости: r = V2 / g tg g При постоянном крене увеличение скорости в два раза увеличивает радиус разворота в четыре раза. Рассмотрим, как влияет удвоение скорости на угловую скорость разворота. Угловая скорость = V / r, при удвоении скорости угловая скорость = V(*2) / r (*4) = ½. При постоянном крене увеличение скорости в два раза уменьшает угловую скорость разворота в два раза.
Самолёты с меньшей скоростью полёта требуют меньше места и времени для выполнения виража. Выдерживание заданного крена и скорости на развороте обеспечивает получение заданного радиуса и угловой скорости разворота независимо от типа самолёта, его веса, положения центра тяжести и т.п. Потребная перегрузка в горизонтальном развороте зависит только от угла крена.
На вышерасположенном графике можно определить радиус и угловую скорость разворота по скорости и крену и наоборот. Этот график верен для любого типа самолёта. В качестве примера показано, что при развороте с креном 20° на скорости 130 узлов радиус будет 4200 футов (1280 м; 0, 69 NM) и угловая скорость 3° в секунду. Тот же разворот на скорости 260 узлов даёт радиус 16800 футов (5120 м; 2, 76 NM) и угловую скорость 1, 5° в секунду.
Перегрузка на развороте
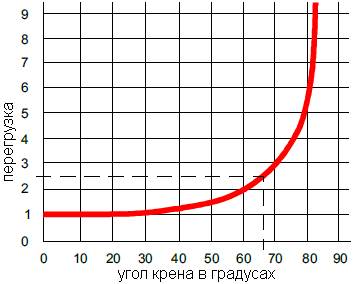
Во время выполнения разворота подъёмная сила должна быть увеличена, чтобы её вертикальная составляющая уравновешивала вес самолёта. Потребная перегрузка ny = Y / G = 1 / cos g. На нижерасположенном рисунке показана взаимосвязь угла крена и перегрузки в установившемся горизонтальном развороте. Это отношение верно для любого самолёта. Как видно из рисунка, перегрузка увеличивается с увеличением крена со всё более возрастающей скоростью. Перегрузка в горизонтальном развороте зависит только от угла крена. Постоянный крен – постоянная перегрузка.
Предельный разворот по максимально допустимой перегрузке.
У каждого самолёта существует своя предельно допустимая перегрузка. У современных скоростных транспортных самолётов она равна 2, 5. В горизонтальном развороте такая перегрузка соответствует крену 67°. Соответствующий радиус разворота будет определяться истинной скоростью самолёта. Полученный таким образом радиус разворота будет минимально достижимым для самолёта из условия не превышения ограничения по перегрузке.
Предельный разворот по максимально-допустимому углу атаки.
Если при развороте с постоянной скоростью увеличивать крен, то для обеспечения потребного увеличения подъёмной силы необходимо будет увеличивать угол атаки. Когда угол атаки достигнет критического значения, то дальнейшее уменьшение радиуса разворота за счёт увеличения крена станет невозможным. Поскольку скорость начала сваливания зависит от веса, то эта граница будет зависеть от текущего веса самолёта.
Предельный разворот по максимальной располагаемой тяге двигателей.
Увеличение подъёмной силы при развороте влечёт за собой потребное увеличение тяги двигателей (из-за роста индуктивного сопротивления). Чем больше крен, тем больше потребная тяга. При определённом угле крена потребная тяга станет равной максимально располагаемой тяге. Дальнейшее увеличение крена (и уменьшение радиуса разворота) будет невозможным (иначе произойдёт падение скорости). Граница предельного по тяге виража определяется располагаемым запасом тяги двигателей.
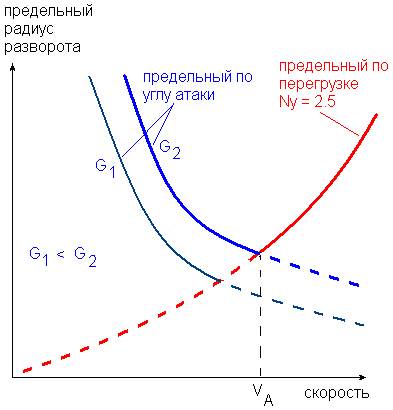
Минимальный радиус разворота
Если тяга двигателей не является ограничивающим фактором, то минимальный радиус разворота будет находиться на пересечении линий ограничения по предельной перегрузке и по сваливанию. Скорость в данной точке называется максимальной скоростью маневрирования (VA). Если скорость больше или равна VA, то нельзя использовать полные углы отклонения рулей и выводить самолёт на углы атаки близкие к критическим, поскольку при этом нагрузки на элементы конструкции могут превысить предельно допустимые значения. Чем тяжелее самолёт, тем больше его минимальный радиус разворота.
Координация разворота.
Разворот не координированный, если самолёт летит со скольжением. Вредный момент рыскания элеронов, крутящий и гироскопический моменты двигателя, асимметричная тяга двигателей, закрутка потока воздушным винтом – всё это даёт предпосылки к потере координации разворота. Индикатором скольжения для пилота является шарик указателя скольжения (уклономера), который устанавливается на приборной доске отдельно или входит составной частью в прибор, показывающий пространственное положение самолёта. Вообще говоря, шарик уклономера не реагирует на скольжение, а показывает боковую перегрузку nz. Но если самолет и тяга двигателей симметричны, то единственной причиной возникновения боковой перегрузки является скольжение, поэтому этот прибор и называют указателем скольжения.
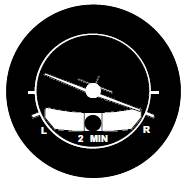
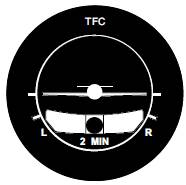
На рисунке изображен прибор, помогающий выполнять координированные развороты (turn co-ordinator). Он включает в себя уровнемер и макет самолёта, который показывает угловую скорость разворота.
Если макет самолёта расположен горизонтально – угловая скорость равна нулю, макет наклонился – появилась угловая скорость, если крыло самолётика показывает на индекс – угловая скорость 3° в секунду, что соответствует Rate 1. Чтобы разворот был координированным, шарик уровнемера нужно удерживать в центре с помощью руля направления. Общее правило – шарик «боится» ноги. Т.е. если шарик ушёл влево – надо нажать на левую педаль. Если элероны и руль направления отклоняются координировано, то шарик будет постоянно в центре и скольжение не возникнет.
На рисунке изображены показания прибора при координированном правом развороте с угловой скоростью 3° в секунду.
Здесь показан правый разворот с внутренним скольжением (на опущенное крыло) (slipping turn). Для устранения скольжения надо дать правую ногу. Уменьшение крена также будет способствовать уменьшению скольжения.
Здесь показан правый разворот с внешним скольжением (на поднятое крыло) (skidding turn). Для устранения скольжения надо дать левую ногу. Увеличение крена также будет способствовать уменьшению скольжения.
Полёт с несимметричной тягой Введение При отказе двигателя на многодвигательном самолёте происходит падение тяги и увеличение лобового сопротивления со стороны отказавшего двигателя. При этом: - уменьшается скорость - опускается нос самолёта и - (наиболее существенное проявление отказа) немедленно возникает разворачивающий момент в сторону отказавшего двигателя.
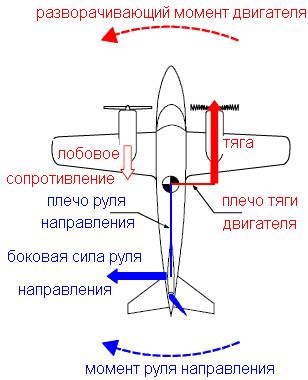
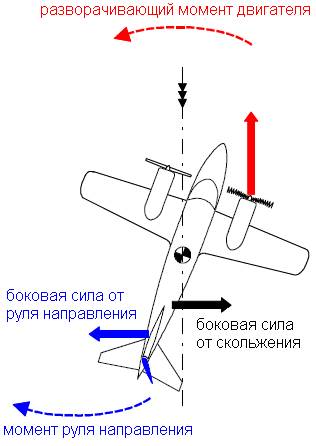
На рисунке показаны силы и моменты, действующие на самолёт при отказе левого двигателя. Самолёт получает момент рыскания влево. Пилот противодействует развитию рысканья отклонением руля направления. При отказе двигателя расположенного вдали от оси симметрии самолёта жизненно важно остановить развивающееся рыскание (скольжение).
Момент рысканья.
Момент рысканья создаётся суммой двух моментов: первый даёт сила тяги работающего двигателя умноженная на плечо от линии действия тяги до центра тяжести самолёта и второй – сила лобового сопротивления отказавшего двигателя, также помноженная на плечо до центра тяжести. Величина момента определяется: - тягой работающего двигателя (зависит от режима работы и высоты полёта) - расстоянием от центра тяжести до линии действия тяги - лобовым сопротивлением отказавшего двигателя. Момент от руля направления, который балансирует момент рысканья от двигателей, определяется произведением боковой силы руля направления на расстояние между центром тяжести и центром давления на киле. В дальнейшем мы рассмотрим, что кроме момента от двигателей, момент от руля направления должен компенсировать также момент от скольжения. Сейчас же, на основе предварительного рассмотрения проблемы, можно сказать, что возможности пилота противостоять развороту из-за отказа двигателя определяются: - располагаемым углом отклонения руля направления (влияет на боковую силу) - центровкой самолёта (влияет на длину плеча боковой силы) - приборной скоростью (влияет на боковую силу).
Рассмотрим ситуацию, когда руль направления отклонён полностью, самолёт имеет предельно заднюю центровку (минимальное плечо силы руля направления) и минимальную приборную скорость, при которой момент, создаваемый рулём направления, равен моменту рыскания от двигателей. Теперь, любое уменьшение скорости приведёт к неуправляемому рысканию самолёта в направлении отказавшего двигателя. Это, в свою очередь, приведёт к неуправляемому кренению на отказавший двигатель. Самолёт войдёт в нисходящую спираль, вывод из которой с использованием только управления самолётом невозможен. В данной ситуации, восстановить управляемость самолёта можно только путём уменьшения тяги работающего двигателя (если есть запас высоты, то можно увеличить скорость за счёт снижения). Минимальная приборная скорость, при которой самолёт может быть сбалансирован при несимметричном отказе двигателя, называется минимальной эволютивной скоростью при отказе двигателя VMC (minimum control speed).
Критический двигатель
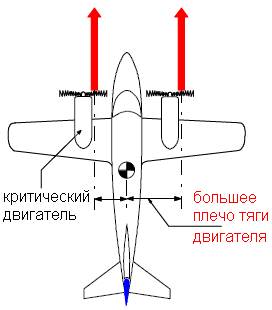
Одним из факторов, влияющих на величину разворачивающего момента при отказе двигателя, является длина плеча силы тяги работающего двигателя относительно центра тяжести самолёта.
Если самолёт оснащён винтовыми двигателями, то на длину плеча тяги влияет эффект асимметричного обтекания воздушного винта. Если при взгляде на винт сзади, он вращается по часовой стрелке, то на положительных углах атаки ось тяги винта смещается вправо. Это происходит из-за того, что нисходящие лопасти винта создают большую тягу, чем поднимающиеся (см. главу 16). В этом случае плечо силы тяги правого двигателя окажется больше, чем у левого (см. рисунок).
При отказе левого двигателя, тяга работающего правого двигателя даст больший разворачивающий момент за счет большего плеча. Значит, VMC с отказавшим левым двигателем будет больше, чем при отказе правого. Критическим двигателем называется тот двигатель, при отказе которого возникает наибольший разворачивающий момент. На маленьких двухмоторных самолётах, чтобы не допустить появления критического двигателя, могут применяться двигатели с противоположным вращением винтов. На левом двигателе винт вращается по часовой, а на правом – против часовой стрелки. Этим достигается минимальное плечо тяги у обоих двигателей. На турбовинтовых самолётах типа King Air и больше винты вращаются в одну и ту же сторону. (Если все винты на многодвигательном самолёте вращаются в одну сторону, то их называют «co-rotating»). На четырех двигательных самолётах критическим является один из внешних двигателей.
Балансировка разворачивающих моментов и боковых сил.
Рисунок в начале данного раздела показывает балансировку разворачивающего момента, но боковая сила руля направления осталась несбалансированной. Существует два способа её балансировки: - с помощью боковой силы вызванной скольжением самолёта; - с помощью боковой составляющей подъёмной силы при создании крена на работающий двигатель (предпочтительный метод).
Балансировка скольжением без крена: Отклонением руля направления создаётся скольжение на работающий двигатель, а элеронами самолёт удерживается от крена. Скольжение создаёт боковую силу на вертикальных поверхностях самолёта, противодействующую боковой силе руля направления.
Создание чрезмерного угла скольжения может привести к срыву потока на киле.
При выполнении балансировки данным способом на приборе «turn co-ordinator» макет самолётика и шарик уклономера будут в центре.
При наличии асимметричной тяги на самолёте положение шарика уклономера не соответствует скольжению.
Данный метод балансировки боковой силы руля направления уменьшает возможности самолёта по набору высоты из-за повышенного лобового сопротивления самолёта. Поэтому его не рекомендуется использовать в таких критических ситуациях, как отказ двигателя на взлёте или уходе на второй круг. Его удобно использовать для первоначальной балансировки самолёта при отказе двигателя в крейсерском полёте. Достоинством данного метода является привычное пилоту положение самолёта без крена, которое легко выдерживать визуально или по приборам. Недостатки: - при больших углах скольжения может произойти срыв потока на киле; - уменьшается располагаемый градиент набора высоты из-за дополнительного лобового сопротивления.
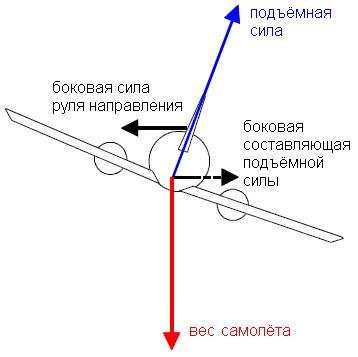
Балансировка кренением на работающий двигатель: С точки зрения аэродинамики более эффективно сбалансировать боковую силу руля направления созданием небольшого крена на работающий двигатель. При этом боковая составляющая подъёмной силы будет противодействовать боковой силе руля направления, и самолёт будет двигаться прямолинейно без скольжения.
Угол крена не должен превышать 5°, чтобы не допустить чрезмерного уменьшения вертикальной составляющей подъёмной силы.
На приборе «turn co-ordinator» макет самолётика будет в центре, поскольку самолёт будет двигаться прямолинейно. А шарик уклономера отклонится от нейтрали примерно на половину своего диаметра, хотя самолёт будет лететь без скольжения.
Создание крена на работающий двигатель уменьшает потребное отклонение руля направления, поскольку моменту руля направления не будет противодействовать момент путевой устойчивости, как это происходит при балансировке без крена. Это создаёт запас хода руля на парирование возможных отклонений. Данный метод даёт минимальное лобовое сопротивление и обеспечивает наилучшие характеристики набора высоты.
Моменты крена и рысканья при несимметричной тяге.
Способность органов управления самолёта противодействовать моментам крена и рыскания определяют управляемость самолёта с несимметричной тягой. Величина этих моментов определяется: - тягой работающего двигателя и плечом тяги относительно центра тяжести. Тяга максимальна на малой скорости и максимальном режиме двигателя.
- высотой полёта. Тяга уменьшается с подъёмом на высоту и при увеличении температуры наружного воздуха. Наиболее критичен отказ двигателя на взлёте в холодный день с низинного аэродрома.
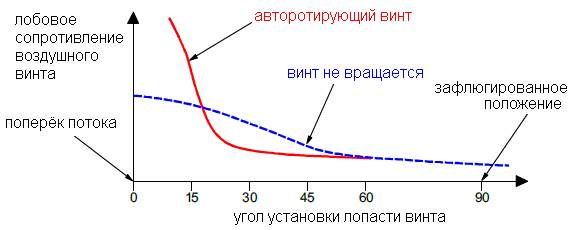
- лобовым сопротивлением неработающего двигателя и его винта. Лобовое сопротивление отказавшего двигателя всегда увеличивает разворачивающий момент. Для винтовых самолётов очень важно, в каком положении находится винт отказавшего двигателя. Если винт авторотирует – он создает большое сопротивление и крутящий момент. Если винт не вращается, то он создаёт меньше сопротивления и совсем не создаёт крутящий момент. Наименьшее сопротивление создаёт зафлюгированный винт, поскольку его лопасти сориентированы по потоку. Закрытие створок маслорадиатора также уменьшает сопротивление отказавшего двигателя.
Популярное:
|
Последнее изменение этой страницы: 2016-07-14; Просмотров: 1060; Нарушение авторского права страницы