
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение передаточных функций синтезированных приводов ⇐ ПредыдущаяСтр 3 из 3
Разомкнутая передаточная функция частотного привода есть передаточная функция желаемой ЛАЧХ и имеет вид:
Разомкнутая передаточная функция позиционного привода:
Получим передаточные функции приводов по задающему воздействию:
1. Передаточная функция частотного привода (U2=0):
2. Передаточная функция позиционного привода (U2=0):
Получим передаточные функции приводов по возмущающему воздействию:
1. Передаточная функция частотного привода (U1=0):
2. Передаточная функция позиционного привода (U1=0):
Для каждой передаточной функции в среде Mathlab определим переходную характеристику, АФЧХ и ЛАФЧХ.
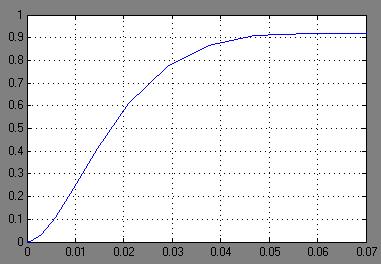
1. Передаточная функция синтезированного частотного привода по задающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
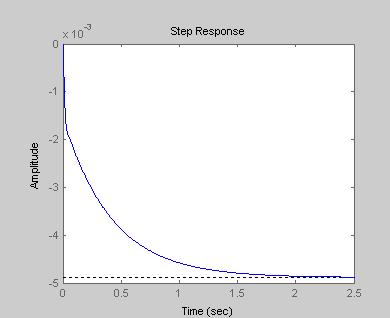
2. Передаточная функция синтезированного частотного привода по возмущающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
3. Передаточная функция синтезированного позиционного привода по задающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
4. Передаточная функция синтезированного позиционного привода по возмущающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
Схемы синтезированных приводов в среде Simulink
Схемы (1) и (2) приводов соберём в среде Simulink и построим по ним переходные характеристики по задающему и возмущающему воздействиям.
Рассмотрим частотный привод:
Подадим на вход этой системы единичное задающее воздействие, тогда получим следующую переходную характеристику:
Подадим на вход единичное возмущающее воздействие:
Рассмотрим позиционный привод:
Подадим на вход этой системы единичное задающее воздействие, тогда получим следующую переходную характеристику:
Подадим на вход единичное возмущающее воздействие:
Полученные переходные характеристики в среде Simulink аналогичны переходных характеристикам, полученным в пункте 8 по передаточных функциям.
10. Оценка соответствия полученных результатов с требуемыми показателями качества Требуемые показатели качества:
Время переходного процесса синтезируемых ЭП tпп
Требуемое перерегулирование синтезируемых ЭП σ
Максимальная установившаяся ошибка регулирования
Амплитуда задающего гармонического воздействия ЭП Xmax=0, 7.
Частота задающего гармонического воздействия ЭП
Требуемый показатель колебательности синтезируемых ЭП М=1, 85.
Требуемый запас устойчивости по фазе для синтезируемых ЭП
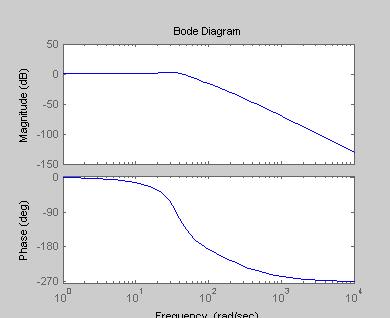
1. Оценим показатели качества частотного привода: 1.1 По задающему воздействию. Время переходного процесса Перерегулирование σ = 1.2. По возмущающему воздействию. Время переходного процесса Перерегулирование Определим запас устойчивости по фазе. Для этого построим ЛАФЧХ разомкнутой системы скорректированного частотного привода:
ЛАФЧХ
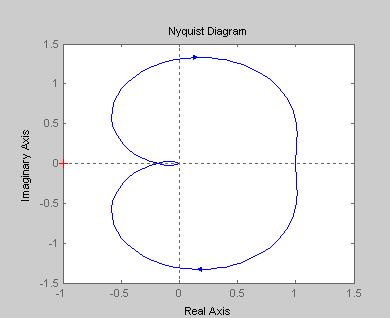
Тогда запас устойчивости по фазе Определим, удовлетворяет ли скорректированный частотный привод требуемому показателю колебательности: Для этого построим АФЧХ разомкнутой системы этого привода.
АФЧХ
Если АФЧХ разомкнутой системы не пересекает, и не описывает окружность радиусом R с центром в точке C, то считается, что замкнутая система удовлетворяет требуемому показателю колебательности M.
Изобразим АФЧХ в увеличенном виде:
Как видно, АФЧХ не пересекает и не описывает окружность, т.е. требование по показателю колебательности удовлетворяется.
Определим максимальную установившуюся ошибку регулирования для синтезированного частотного привода.
Для этого на вход системы подадим незатухающий гармонический сигнал амплитуды равное единице (Xmax=0, 7) и частоты ω х=3, 2 с-1. Тогда мы можем наблюдать следующую установившуюся ошибку системы. Полученная ошибка удовлетворяет требованиям показателей качества.
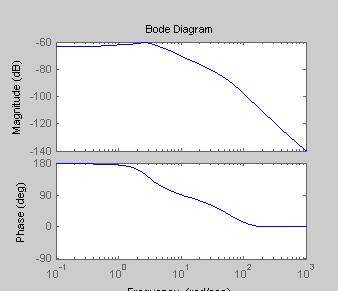
2. Оценим показатели качества позиционного привода: 1.1 По задающему воздействию. Время переходного процесса Перерегулирование σ = 1.2. По возмущающему воздействию. Время переходного процесса Перерегулирование Определим запас устойчивости по фазе. Для этого построим ЛАФЧХ разомкнутой системы скорректированного позиционного привода:
ЛАФЧХ
Тогда запас устойчивости по фазе Определим, удовлетворяет ли скорректированный позиционный привод требуемому показателю колебательности: Для этого построим АФЧХ разомкнутой системы этого привода. АФЧХ
Если АФЧХ разомкнутой системы не пересекает, и не описывает окружность радиусом R с центром в точке C, то считается, что замкнутая система удовлетворяет требуемому показателю колебательности M.
Изобразим АФЧХ в увеличенном виде:
Как видно, АФЧХ не пересекает и не описывает окружность, т.е. требование по показателю колебательности удовлетворяется.
Определим максимальную установившуюся ошибку регулирования для синтезированного позиционного привода.
Для этого на вход системы подадим незатухающий гармонический сигнал амплитуды равное единице (Xmax=0, 7) и частоты ω х=3, 2 с-1.
Тогда мы можем наблюдать следующую установившуюся ошибку системы.
Полученная ошибка удовлетворяет заданной.
ЗАКЛЮЧЕНИЕ
Получил математические модели двигателя постоянного тока, где входное воздействие – напряжение питания ДПТ, возмущающее воздействие – момент нагрузки ДПТ, выходная переменная для первой системы – частота вращения вала ротора, для второй системы – угол поворота вала ротора. Для полученных математических моделей составил общую модель ДПТ в стандартной форме пространства состояний, которая показала, что общая модель находится на границе апериодической устойчивости. На основании модели в пространстве состояний получил четыре передаточные функции ДПТ по задающему и возмущающему воздействиям. Для каждой ПФ получил переходную характеристику, ЛАФЧХ и АФЧХ. Получил аналогичные передаточные функции по структурным схемам в среде Simulink. Заданным способом выполнил синтез регуляторов. Синтезированные системы по задающему воздействию полностью отвечают заданным показателям качества. По возмущающему воздействию системы имеют перерегулирование большее, чем заданное. Но ввиду того, что эти воздействия имеют очень малую величину, порядка 10-3, влияние их на систему тоже очень мало, в результате чего можно сказать, что системы полностью отвечают заданным требованиям. Для каждого синтезированного привода в среде Mathlab построил переходные характеристики, ЛАФЧХ и АФЧХ. Также получил переходные характеристики приводов по структурным схемам с среде Simulink. Они получились аналогичны переходным характеристикам полученным в Mathlab. Также проверил соответствие синтезированных приводов по показателям колебательности, установившейся ошибке регулирования и на соответствие систем требуемому запасу устойчивости по фазе. Все эти показатели в результате синтеза были удовлетворены. Таким образом получил частотный и позиционный приводы, которые можно применить на практике и они будут отвечать заданным требованиям.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. И.А. Ахмадеев «Составление математических моделей систем автоматического управления». Набережные Челны, КамПИ, 1992 г., 28 с.
2. А.З. Асанов «Методы анализа динамических систем». Набережные Челны, КамПИ, 1991 г., 35 с.
3. А.З. Асанов «Анализ динамических систем в пространстве состояний». Набережные Челны, КамПИ, 1990 г., 42 с.
4. А.З. Асанов «Метод пространства состояний в задачах анализа динамических систем». Набережные Челны, КамПИ, 1992 г., 83 с.
5. А.А. Первозванский «Курс теории автоматического управления». Москва: Наука, физ.-мат. лит. 1986 г., 616 с.
6. Топчеев Ю.Н. «Атлас для проектирования систем автоматического регулирования». Москва.; Машиностроение, 1989.
7. Макаров Н.М., Менский Б.М. «Линейные автоматические системы». Москва.; Машиностроение, 1977.
8. Иващенко Н.Н. «Автоматическое регулирование». Москва.; Машиностроение, 1973.
9. Ерофеев А.А. «Теория автоматического управления». Учебник для вузов. 2-ое издание, переработанное и дополненное. СПб.: Политехника, 2001.
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 693; Нарушение авторского права страницы























 0, 35 с.
0, 35 с.
 рад/с.
рад/с. .
. 0, 035 с.
0, 035 с.
 .
.

 , что удовлетворяет заданному значению.
, что удовлетворяет заданному значению.





 .
.

 , что удовлетворяет заданному значению.
, что удовлетворяет заданному значению.


