
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Математическая модель в пространстве состоянийСтр 1 из 3Следующая ⇒
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Автоматизация промышленного производства является одной из важнейших задач технического прогресса. Дальнейшие развитие промышленности и сельского хозяйства требует создания, как отдельных систем автоматического регулирования, так и систем управления производством, отраслью и всем народным хозяйством в целом. Курс « Автоматическое регулирование» изучается во всех высших технических учебных заведениях независимо от их специализации и является общеинженерной дисциплиной при подготовке современных высококвалифицированных инженером. Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбирать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались. Теория автоматического регулирования прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчета непрерывных систем базируются на частотных методах, а расчета дискретных и дискретно-непрерывных — на методах г-преобразования. В настоящее время развиваются методы анализа нелинейных систем автоматического регулирования. Нарушение принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся (в зависимости от воздействия) режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Еще с большими трудностями встречается проектировщик при расчете экстремальных и самонастраивающихся систем регулирования. Как теория автоматического регулирования, так и теория управления входят в науку под общим названием «техническая кибернетика», которая в настоящее время получила значительное развитие. Техническая кибернетика изучает общие закономерности сложных динамических систем управления технологическими и производственными процессами. Техническая кибернетика, автоматическое управление и автоматическое регулирование развиваются по двум основным направлениям: первое связано с постоянным прогрессом и совершенствованием конструкции элементов и технологии их изготовления; второе — с наиболее рациональным использованием этих элементов или их групп, что составляет задачу проектирования систем. Проектирование систем автоматического регулирования можно вести двумя путями: методом анализа, когда при заранее выбранной структуре системы (расчетным путем или моделированием) определяют ее параметры; методом синтеза, когда по требованиям к системе сразу же выбирают наилучшую ее структуру и параметры. Оба эти способа получили широкое практическое применение.
Определение параметров системы, когда известна ее структура и требования на всю систему в целом, относится к задаче синтеза. Решение этой задачи при линейном объекте регулирования можно найти, используя, например, частотные методы, способ корневого годографа или изучая траектории корней характеристического уравнения замкнутой системы. Выбор корректирующего устройства методом синтеза в классе дробно-рациональных функций комплексного переменного можно выполнить с помощью графоаналитических методов. Эти же методы позволяют синтезировать корректирующие устройства, подавляющие автоколебательные и неустойчивые периодические режимы в нелинейных системах. Дальнейшее развитие методы синтеза получили на основе принципов максимума и динамического программирования, когда определяется оптимальный с точки зрения заданного критерия качества закон регулирования, обеспечивающий верхний предел качества системы, к которому необходимо стремиться при ее проектировании. Однако решение этой задачи практически не всегда возможно из-за сложности математического описания физических процессов в системе, невозможности решения самой задачи оптимизации и трудностей технической реализации найденного нелинейного закона регулирования. Необходимо отметить, что реализация сложных законов регулирования возможна лишь при включении цифровой вычислительной машины в контур системы. Создание экстремальных и самонастраивающихся систем также связано с применением аналоговых или цифровых вычислительных машин. При рассмотрении системы автоматического регулирования с цифровыми вычислительными машинами главное внимание уделено способам реализации алгоритмов, принципам построения экстремальных систем с ЦВМ и методам составления программ коррекции на управляющих цифровых вычислительных машинах. Такой объем теории дискретно-непрерывных систем регулирования с ЦВМ привел к необходимости введения нового математического аппарата в виде уравнений состояния линейных стационарных и нестационарных систем регулирования. В результате этого удалось довести теорию регулирования до уровня, на котором обычно излагаются некоторые разделы теории автоматического управления. Формирование систем автоматического регулирования, как правило, выполняют на основе аналитических методов анализа или синтеза. На этом этапе проектирования систем регулирования на основе принятых допущений составляют математическую модель системы и выбирают предварительную ее структуру. В зависимости от типа модели (линейная или нелинейная) выбирают метод расчета для определения параметров, обеспечивающих заданные показатели устойчивости, точности и качества. После этого уточняют математическую модель и с использованием средств математического моделирования определяют динамические процессы в системе. При действии различных входных сигналов снимают частотные характеристики и сравнивают с расчетными. Затем окончательно устанавливают запасы устойчивости системы по фазе и модулю и находят основные показатели качества. Далее, задавая на модель типовые управляющие воздействия, снимают характеристики точности. На основании математического моделирования составляют технические требования на аппаратуру системы. Из изготовленной аппаратуры собирают регулятор и передают его на полунатурное моделирование, при котором объект регулирования набирают в виде математической модели.
По полученным в результате полунатурного моделирования характеристикам принимают решение о пригодности работы регулятора с реальным объектом регулирования. Окончательный выбор параметров регулятора и его настройка выполняют в натурных условиях при опытной отработке системы регулирования. Развитие теории автоматического регулирования на основе уравнений состояния и z-преобразований, принципа максимума и метода динамического программирования совершенствует методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда.
ПРАКТИЧЕСКАЯ ЧАСТЬ 1. Математическое описание двигателя постоянного тока.
Управление электродвигателем осуществляется подачей на якорь напряжения Uу с выхода усилителя мощности.
Электродвигатель состоит из двух звеньев: якорной цепи и механической части, с которой связана нагрузка. Выходной частью является угловая скорость вращения
Примем следующие допущения:
а) пренебрежем реакцией якоря электродвигателя. б) магнитный поток возбуждения будем считать постоянным
Уравнение равновесия ЭДС в якорной цепи имеет вид:
Далее перейдя к приращениям, а затем к относительным безразмерным уравнениям получим уравнения в стандартном виде:
где
Математическая модель ДПТ, где входное воздействие – напряжение питания Uy (
Ввиду зависимости между углом поворота и частотой вращения:
Получим, что. Математическая модель ДПТ, где входное воздействие – напряжение питания Uy (
Определение устойчивости Определим устойчивость ДПТ. Для этого получим характеристическое уравнение объекта в виде:
det(pE-A)=0;
В среде Mathlab найдём корни уравнения: Зададим вектор полинома p=[1 7.43 12.075 0]; r=roots(p); p=0; p=-5.0289; p=-2.4011; По полученным корням характеристического уравнения можно сказать, что объект находится на границе апериодической устойчивости.
Определение ПХ, АФЧХ и ЛФЧХ 1)
Переходная характеристика
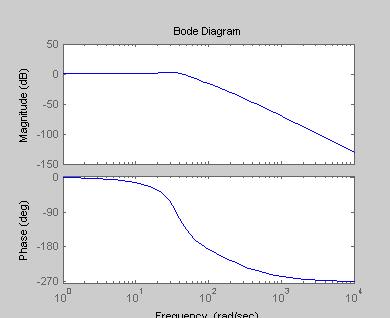
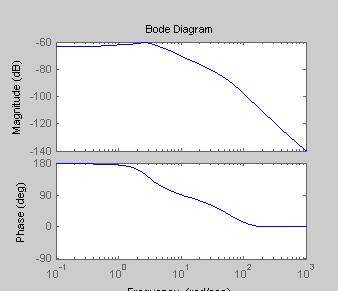
ЛАФЧХ
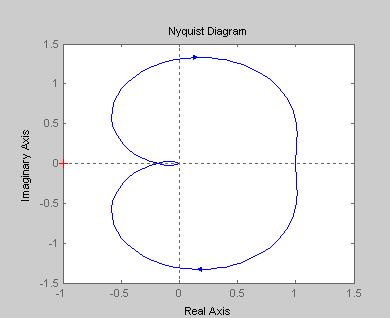
АФЧХ
2) Переходная характеристика
ЛАФЧХ
АФЧХ
3) Переходная характеристика
ЛАФЧХ
АФЧХ
4) Переходная характеристика
ЛАФЧХ
АФЧХ
Синтез систем
Примем структурные схемы приводов в следующем виде:
Mн

Mн

Здесь Wрω и Wрφ передаточные функции регуляторов.
Произведём синтез систем методом Санковского-Сигалова:
1) синтез системы, где выходной параметр частота вращения вала ротора ω.
Так как на вход подаётся гармоническое воздействие, низкочастотная асимптота не должна проходить ниже контрольной точки, координаты которой равны:
Преобразуем передаточную функцию:
Теперь мы можем построить асимптотическую исходную ЛАЧХ. T1=0.416 c. T2=0.198 c.
Построим исходную ЛАЧХ:
По виду исходной ЛАЧХ построим желаемую ЛАЧХ. Из типовых ЛАЧХ по методу Санковского-Сигалова выберем ЛАЧХ типа 1:
Передаточная функция этой ЖЛАЧХ имеет вид:
Первую сопрягающую частоту ЖЛАЧХ примем равной второй сопрягающей частоте исходной системы. Мы поступит так, потому что первая сопрягающая частота оказывается меньше
Необходимое значение запаса устойчивости по фазе Так как низкочастотная асимптота не должна быть ниже контрольной точки, ЖЛАЧХ приподнимается на 3 дБ над ней. В результате L=22 дБ (К=12, 5)
Тогда частота среза
Сопрягающая частота высокочастотной части: Отсюда
Желаемая ЛАЧХ, исходная ЛАЧХ и ЛАЧХ корректирующего устройства.
Таким образом желаемая передаточная функция системы имеет вид:
Передаточная функция корректирующего устройства (регулятора):
2) синтез системы, где выходной параметр угол поворота вала ротора φ.
Так как на вход подаётся гармоническое воздействие, низкочастотная асимптота не должна проходить ниже контрольной точки, координаты которой равны:
Построим исходную ЛАЧХ и по её виду выберем желаемую ЛАЧХ:
В качестве желаемой ЛАЧХ выберем ЛАЧХ типа 2 (по Санковскому-Сигалову)
Имеющую передаточную функцию
Первую сопрягающую частоту ЖЛАЧХ примем равной второй сопрягающей частоте исходной системы. Мы поступит так, потому что первая сопрягающая частота оказывается меньше
Необходимое значение запаса устойчивости по фазе Так как низкочастотная асимптота не должна быть ниже контрольной точки, ЖЛАЧХ приподнимается на 3 дБ над ней. В результате L=32 дБ (К=39, 8). В данном случае это не совсем обязательно, т.к. низкочастотная асимптота имеет наклон -20 дБ/дек и не будет заходить в запретную зону. Но так как мы используем приближённые методы получения ЖЛАЧХ приподымем желаемую ЛАЧХ.
Тогда частота среза
Сопрягающая частота высокочастотной части: Отсюда
Желаемая ЛАЧХ, исходная ЛАЧХ и ЛАЧХ корректирующего устройства.
Таким образом желаемая передаточная функция системы имеет вид:
Передаточная функция корректирующего устройства (регулятора):
Переходная характеристика
ЛАФЧХ
АФЧХ
2. Передаточная функция синтезированного частотного привода по возмущающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
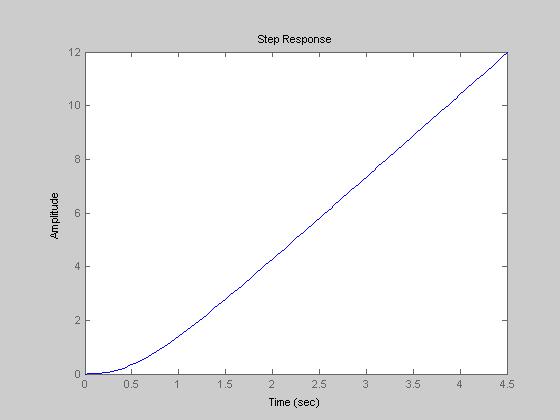
3. Передаточная функция синтезированного позиционного привода по задающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
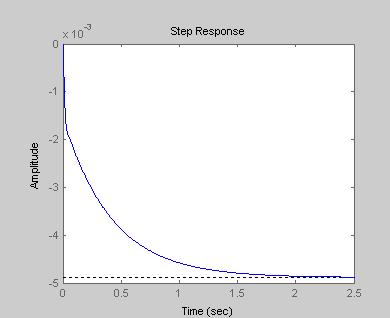
4. Передаточная функция синтезированного позиционного привода по возмущающему воздействию:
Переходная характеристика
ЛАФЧХ
АФЧХ
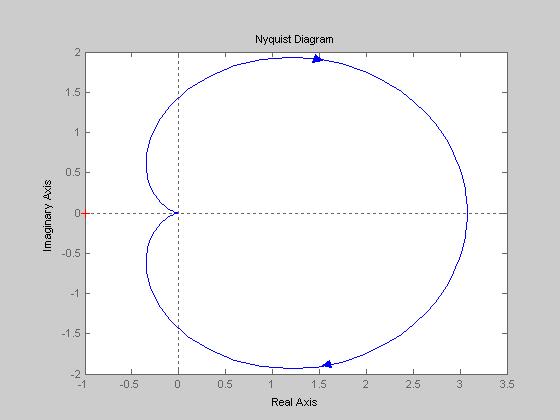
АФЧХ
Если АФЧХ разомкнутой системы не пересекает, и не описывает окружность радиусом R с центром в точке C, то считается, что замкнутая система удовлетворяет требуемому показателю колебательности M.
Изобразим АФЧХ в увеличенном виде:
Как видно, АФЧХ не пересекает и не описывает окружность, т.е. требование по показателю колебательности удовлетворяется.
Определим максимальную установившуюся ошибку регулирования для синтезированного частотного привода.
Для этого на вход системы подадим незатухающий гармонический сигнал амплитуды равное единице (Xmax=0, 7) и частоты ω х=3, 2 с-1. Тогда мы можем наблюдать следующую установившуюся ошибку системы. Полученная ошибка удовлетворяет требованиям показателей качества.
2. Оценим показатели качества позиционного привода: 1.1 По задающему воздействию. Время переходного процесса Перерегулирование σ = 1.2. По возмущающему воздействию. Время переходного процесса Перерегулирование Определим запас устойчивости по фазе. Для этого построим ЛАФЧХ разомкнутой системы скорректированного позиционного привода:
ЛАФЧХ
Тогда запас устойчивости по фазе Определим, удовлетворяет ли скорректированный позиционный привод требуемому показателю колебательности: Для этого построим АФЧХ разомкнутой системы этого привода. АФЧХ
Если АФЧХ разомкнутой системы не пересекает, и не описывает окружность радиусом R с центром в точке C, то считается, что замкнутая система удовлетворяет требуемому показателю колебательности M.
Изобразим АФЧХ в увеличенном виде:
Как видно, АФЧХ не пересекает и не описывает окружность, т.е. требование по показателю колебательности удовлетворяется.
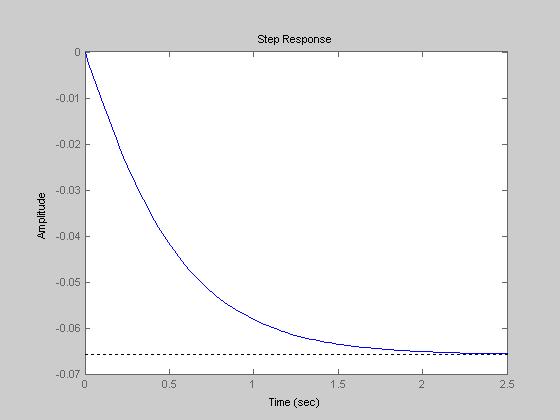
Определим максимальную установившуюся ошибку регулирования для синтезированного позиционного привода.
Для этого на вход системы подадим незатухающий гармонический сигнал амплитуды равное единице (Xmax=0, 7) и частоты ω х=3, 2 с-1.
Тогда мы можем наблюдать следующую установившуюся ошибку системы.
Полученная ошибка удовлетворяет заданной.
ЗАКЛЮЧЕНИЕ
Получил математические модели двигателя постоянного тока, где входное воздействие – напряжение питания ДПТ, возмущающее воздействие – момент нагрузки ДПТ, выходная переменная для первой системы – частота вращения вала ротора, для второй системы – угол поворота вала ротора. Для полученных математических моделей составил общую модель ДПТ в стандартной форме пространства состояний, которая показала, что общая модель находится на границе апериодической устойчивости. На основании модели в пространстве состояний получил четыре передаточные функции ДПТ по задающему и возмущающему воздействиям. Для каждой ПФ получил переходную характеристику, ЛАФЧХ и АФЧХ. Получил аналогичные передаточные функции по структурным схемам в среде Simulink. Заданным способом выполнил синтез регуляторов. Синтезированные системы по задающему воздействию полностью отвечают заданным показателям качества. По возмущающему воздействию системы имеют перерегулирование большее, чем заданное. Но ввиду того, что эти воздействия имеют очень малую величину, порядка 10-3, влияние их на систему тоже очень мало, в результате чего можно сказать, что системы полностью отвечают заданным требованиям. Для каждого синтезированного привода в среде Mathlab построил переходные характеристики, ЛАФЧХ и АФЧХ. Также получил переходные характеристики приводов по структурным схемам с среде Simulink. Они получились аналогичны переходным характеристикам полученным в Mathlab. Также проверил соответствие синтезированных приводов по показателям колебательности, установившейся ошибке регулирования и на соответствие систем требуемому запасу устойчивости по фазе. Все эти показатели в результате синтеза были удовлетворены. Таким образом получил частотный и позиционный приводы, которые можно применить на практике и они будут отвечать заданным требованиям.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. И.А. Ахмадеев «Составление математических моделей систем автоматического управления». Набережные Челны, КамПИ, 1992 г., 28 с.
2. А.З. Асанов «Методы анализа динамических систем». Набережные Челны, КамПИ, 1991 г., 35 с.
3. А.З. Асанов «Анализ динамических систем в пространстве состояний». Набережные Челны, КамПИ, 1990 г., 42 с.
4. А.З. Асанов «Метод пространства состояний в задачах анализа динамических систем». Набережные Челны, КамПИ, 1992 г., 83 с.
5. А.А. Первозванский «Курс теории автоматического управления». Москва: Наука, физ.-мат. лит. 1986 г., 616 с.
6. Топчеев Ю.Н. «Атлас для проектирования систем автоматического регулирования». Москва.; Машиностроение, 1989.
7. Макаров Н.М., Менский Б.М. «Линейные автоматические системы». Москва.; Машиностроение, 1977.
8. Иващенко Н.Н. «Автоматическое регулирование». Москва.; Машиностроение, 1973.
9. Ерофеев А.А. «Теория автоматического управления». Учебник для вузов. 2-ое издание, переработанное и дополненное. СПб.: Политехника, 2001.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Автоматизация промышленного производства является одной из важнейших задач технического прогресса. Дальнейшие развитие промышленности и сельского хозяйства требует создания, как отдельных систем автоматического регулирования, так и систем управления производством, отраслью и всем народным хозяйством в целом. Курс « Автоматическое регулирование» изучается во всех высших технических учебных заведениях независимо от их специализации и является общеинженерной дисциплиной при подготовке современных высококвалифицированных инженером. Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбирать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались. Теория автоматического регулирования прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчета непрерывных систем базируются на частотных методах, а расчета дискретных и дискретно-непрерывных — на методах г-преобразования. В настоящее время развиваются методы анализа нелинейных систем автоматического регулирования. Нарушение принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся (в зависимости от воздействия) режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Еще с большими трудностями встречается проектировщик при расчете экстремальных и самонастраивающихся систем регулирования. Как теория автоматического регулирования, так и теория управления входят в науку под общим названием «техническая кибернетика», которая в настоящее время получила значительное развитие. Техническая кибернетика изучает общие закономерности сложных динамических систем управления технологическими и производственными процессами. Техническая кибернетика, автоматическое управление и автоматическое регулирование развиваются по двум основным направлениям: первое связано с постоянным прогрессом и совершенствованием конструкции элементов и технологии их изготовления; второе — с наиболее рациональным использованием этих элементов или их групп, что составляет задачу проектирования систем. Проектирование систем автоматического регулирования можно вести двумя путями: методом анализа, когда при заранее выбранной структуре системы (расчетным путем или моделированием) определяют ее параметры; методом синтеза, когда по требованиям к системе сразу же выбирают наилучшую ее структуру и параметры. Оба эти способа получили широкое практическое применение.
Определение параметров системы, когда известна ее структура и требования на всю систему в целом, относится к задаче синтеза. Решение этой задачи при линейном объекте регулирования можно найти, используя, например, частотные методы, способ корневого годографа или изучая траектории корней характеристического уравнения замкнутой системы. Выбор корректирующего устройства методом синтеза в классе дробно-рациональных функций комплексного переменного можно выполнить с помощью графоаналитических методов. Эти же методы позволяют синтезировать корректирующие устройства, подавляющие автоколебательные и неустойчивые периодические режимы в нелинейных системах. Дальнейшее развитие методы синтеза получили на основе принципов максимума и динамического программирования, когда определяется оптимальный с точки зрения заданного критерия качества закон регулирования, обеспечивающий верхний предел качества системы, к которому необходимо стремиться при ее проектировании. Однако решение этой задачи практически не всегда возможно из-за сложности математического описания физических процессов в системе, невозможности решения самой задачи оптимизации и трудностей технической реализации найденного нелинейного закона регулирования. Необходимо отметить, что реализация сложных законов регулирования возможна лишь при включении цифровой вычислительной машины в контур системы. Создание экстремальных и самонастраивающихся систем также связано с применением аналоговых или цифровых вычислительных машин. При рассмотрении системы автоматического регулирования с цифровыми вычислительными машинами главное внимание уделено способам реализации алгоритмов, принципам построения экстремальных систем с ЦВМ и методам составления программ коррекции на управляющих цифровых вычислительных машинах. Такой объем теории дискретно-непрерывных систем регулирования с ЦВМ привел к необходимости введения нового математического аппарата в виде уравнений состояния линейных стационарных и нестационарных систем регулирования. В результате этого удалось довести теорию регулирования до уровня, на котором обычно излагаются некоторые разделы теории автоматического управления. Формирование систем автоматического регулирования, как правило, выполняют на основе аналитических методов анализа или синтеза. На этом этапе проектирования систем регулирования на основе принятых допущений составляют математическую модель системы и выбирают предварительную ее структуру. В зависимости от типа модели (линейная или нелинейная) выбирают метод расчета для определения параметров, обеспечивающих заданные показатели устойчивости, точности и качества. После этого уточняют математическую модель и с использованием средств математического моделирования определяют динамические процессы в системе. При действии различных входных сигналов снимают частотные характеристики и сравнивают с расчетными. Затем окончательно устанавливают запасы устойчивости системы по фазе и модулю и находят основные показатели качества. Далее, задавая на модель типовые управляющие воздействия, снимают характеристики точности. На основании математического моделирования составляют технические требования на аппаратуру системы. Из изготовленной аппаратуры собирают регулятор и передают его на полунатурное моделирование, при котором объект регулирования набирают в виде математической модели.
По полученным в результате полунатурного моделирования характеристикам принимают решение о пригодности работы регулятора с реальным объектом регулирования. Окончательный выбор параметров регулятора и его настройка выполняют в натурных условиях при опытной отработке системы регулирования. Развитие теории автоматического регулирования на основе уравнений состояния и z-преобразований, принципа максимума и метода динамического программирования совершенствует методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда.
ПРАКТИЧЕСКАЯ ЧАСТЬ 1. Математическое описание двигателя постоянного тока.
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 951; Нарушение авторского права страницы

 .
. = const.
= const.
 - постоянная времени цепи якоря,
- постоянная времени цепи якоря,  - коэффициент пропорциональности,
- коэффициент пропорциональности,  - электромеханическая постоянная времени
- электромеханическая постоянная времени -коэффициент влияния нагрузки
-коэффициент влияния нагрузки ), возмущающее воздействие M (МН), выходная переменная – частота вращения вала
), возмущающее воздействие M (МН), выходная переменная – частота вращения вала  :
: 
 .
.


 ;
; 

 ;
; 


 ;
; 


 ;
; 







 (1)
(1) _
_






 с-1.
с-1. дБ.
дБ.
 c-1.
c-1. c-1.
c-1. дБ.
дБ.




 .
. с-1.
с-1. .
. с-1.
с-1.

 с-1.
с-1.








 ;
;  с-1.
с-1. с-1.
с-1.

















 0, 093 с.
0, 093 с.
 .
.

 , что удовлетворяет заданному значению.
, что удовлетворяет заданному значению.


