|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Получение передаточных функций
Получим передаточные функции ДПТ по уравнениям пространства состояний:
Применим к этим уравнениям преобразование Лапласа.
где Х(0) – начальные условия. Из первого уравнения выразим вектор Х(р):
Подставив полученное во второе уравнение, получим:
где Е – единичная матрица. При нулевых (по определению ПФ, её начальные условия равны нулю, т.е. Х(0)=0) начальных условиях можно найти аналитическое выражение ПФ.
Получим:
Примем U2=0, тогда следует что:
Примем U1=0, тогда:
Определение ПХ, АФЧХ и ЛФЧХ 1)
Переходная характеристика
ЛАФЧХ
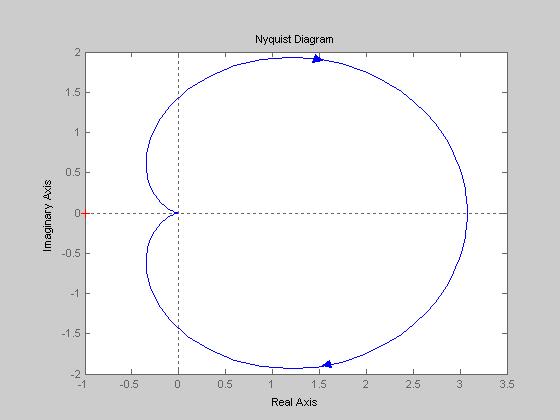
АФЧХ
2) Переходная характеристика
ЛАФЧХ
АФЧХ
3) Переходная характеристика
ЛАФЧХ
АФЧХ
4) Переходная характеристика
ЛАФЧХ
АФЧХ
Получение структурных схем ДПТ 1) Изобразим структурную схему ДПТ, где входное воздействие – напряжение питания U, возмущающее воздействие – момент нагрузки вала МН, а выходная переменная – частота вращения вала ω.
2) Изобразим структурную схему ДПТ, где входное воздействие напряжение питания U, возмущающее воздействие – момент нагрузки вала MН, а выходная переменная – угол поворота вала j.
По правилам структурных преобразований преобразуем полученные структурные схемы к одноконтурному виду:
1) Mн
 U _ ω U _ ω
2) Ввиду того, что вторая система до интегратора аналогична первой, то можно получить следующую структурную схему:
Mн
U _ φ
Построим для полученных одноконтурных схем переходные характеристики по задающему и возмущающему воздействиям.
1) Для первой схемы (выходная величина ω ) получим:
Переходная характеристика по задающему воздействию
Переходная характеристика по возмущающему воздействию
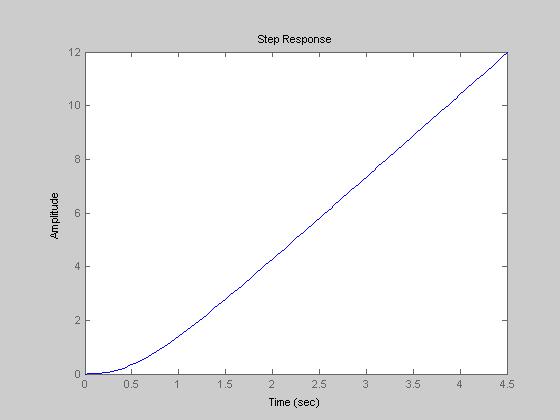
2) Для второй системы (выходная величина φ ):
Переходная характеристика по задающему воздействию
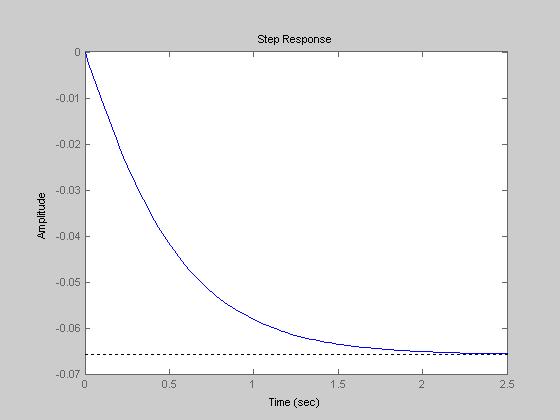
Переходная характеристика по возмущающему воздействию
Синтез систем
Примем структурные схемы приводов в следующем виде:
Mн

Mн

Здесь Wрω и Wрφ передаточные функции регуляторов.
Произведём синтез систем методом Санковского-Сигалова:
1) синтез системы, где выходной параметр частота вращения вала ротора ω.
Так как на вход подаётся гармоническое воздействие, низкочастотная асимптота не должна проходить ниже контрольной точки, координаты которой равны:
Преобразуем передаточную функцию:
Теперь мы можем построить асимптотическую исходную ЛАЧХ. T1=0.416 c. T2=0.198 c.
Построим исходную ЛАЧХ:
По виду исходной ЛАЧХ построим желаемую ЛАЧХ. Из типовых ЛАЧХ по методу Санковского-Сигалова выберем ЛАЧХ типа 1:
Передаточная функция этой ЖЛАЧХ имеет вид:
Первую сопрягающую частоту ЖЛАЧХ примем равной второй сопрягающей частоте исходной системы. Мы поступит так, потому что первая сопрягающая частота оказывается меньше
Необходимое значение запаса устойчивости по фазе Так как низкочастотная асимптота не должна быть ниже контрольной точки, ЖЛАЧХ приподнимается на 3 дБ над ней. В результате L=22 дБ (К=12, 5)
Тогда частота среза
Сопрягающая частота высокочастотной части: Отсюда
Желаемая ЛАЧХ, исходная ЛАЧХ и ЛАЧХ корректирующего устройства.
Таким образом желаемая передаточная функция системы имеет вид:
Передаточная функция корректирующего устройства (регулятора):
2) синтез системы, где выходной параметр угол поворота вала ротора φ.
Так как на вход подаётся гармоническое воздействие, низкочастотная асимптота не должна проходить ниже контрольной точки, координаты которой равны:
Построим исходную ЛАЧХ и по её виду выберем желаемую ЛАЧХ:
В качестве желаемой ЛАЧХ выберем ЛАЧХ типа 2 (по Санковскому-Сигалову)
Имеющую передаточную функцию
Первую сопрягающую частоту ЖЛАЧХ примем равной второй сопрягающей частоте исходной системы. Мы поступит так, потому что первая сопрягающая частота оказывается меньше
Необходимое значение запаса устойчивости по фазе Так как низкочастотная асимптота не должна быть ниже контрольной точки, ЖЛАЧХ приподнимается на 3 дБ над ней. В результате L=32 дБ (К=39, 8). В данном случае это не совсем обязательно, т.к. низкочастотная асимптота имеет наклон -20 дБ/дек и не будет заходить в запретную зону. Но так как мы используем приближённые методы получения ЖЛАЧХ приподымем желаемую ЛАЧХ.
Тогда частота среза
Сопрягающая частота высокочастотной части: Отсюда
Желаемая ЛАЧХ, исходная ЛАЧХ и ЛАЧХ корректирующего устройства.
Таким образом желаемая передаточная функция системы имеет вид:
Передаточная функция корректирующего устройства (регулятора):
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 768; Нарушение авторского права страницы





 ;
;  ;
;  ;
;  ;
; 































 (1)
(1) _
_


 с-1.
с-1. дБ.
дБ.
 c-1.
c-1. c-1.
c-1. дБ.
дБ.




 .
. с-1.
с-1. .
. с-1.
с-1.

 с-1.
с-1.








 ;
;  с-1.
с-1. с-1.
с-1.