|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
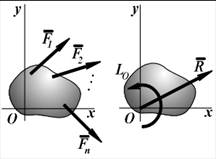
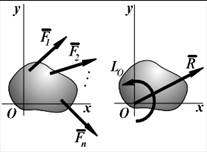
Главный вектор и главный момент
Рассмотрим плоскую систему сил (F1, F2, ..., Fn), действующих на твердое тело в координатной плоскости Oxy.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 +... + Fn = Fi. Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1) + MO(F2) +... + MO(Fn) = MO(Fi). Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Для плоской системы сил вместо векторного главного момента используют понятие алгебраического главного момента. Алгебраическим главным моментом LO плоской системы сил относительно центра О, лежащего в плоскости действия сил, называют сумму алгебраических моментов этих сил относительно центра О.
Главный вектор и главный момент плоской системы сил обычно вычисляется аналитическими методами.
Условия равновесия произвольной пространственной системы сил Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю:
R = 0, LO = 0.
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) пространственной системы сил можно сформулировать следующим образом:
Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и сумма их моментов относительно этих осей были равны нулю:
Fix = 0; Fiy = 0; Fiz = 0;
MOx(Fi) = 0; MOy(Fi) = 0; MOz(Fi) = 0.
Если на тело кроме сил действуют пары сил, заданные их векторными моментами Mk, то при этом вид первых трех уравнений равновесия не изменится (сумма проекций сил пары на любую ось равна нулю), а в последние три уравнения добавляются суммы проекций векторов Mk на координатные оси:
MOx(Fi) + Mkx = 0; MOy(Fi) + Mky = 0; MOz(Fi) + Mkz = 0.
Уравнения равновесия твердого тела под действием произвольной плоской системы сил Для равновесия твердрго тела, находящегося под действием плоской системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы.
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) плоской системы сил можно сформулировать в следующих трех формах: Основная форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма их алгебраических моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю:
Fix = 0; Fiy = 0; MO(Fi) = 0. (I) Вторая форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно двух центров А и В и сумма их проекций на ось Ox, не перпендикулярную оси Ox, были равны нулю:
Fix = 0; MА(Fi) = 0; MВ(Fi) = 0. (II) Третья форма уравнений равновесия (уравнения трех моментов):
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно любых трех центров А, В и С, не лежащих на одной прямой, были равны нулю:
MА(Fi) = 0; MВ(Fi) = 0; MС(Fi) = 0. (III)
Уравнения равновесия в форме (I) считаются основными, так как при их использовании нет никаких ограничений на выбор координатных осей и центра моментов.
Уравнения равновесия твердого тела под действием плоской системы параллельных сил (начало в билете 4)
В частном случае, если все силы плоской системы параллельны, то условия равновесия таких сил выражаются не тремя, а двумя уравнениями: Fiy = 0; MO(Fi) = 0 причем ось Ох параллельна данным силам.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 2525; Нарушение авторского права страницы