
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ
ПРИКЛАДНАЯ МЕХАНИКА
Задания и методические указания к выполнению курсового проекта (спец. 190100); курсовой работы (спец.210200)
Факультет машиностроительный
Направления и специальности подготовки дипломированных специалистов: 653700 – приборостроение 190100 – приборостроение 657900 – автоматизированные технологии и производства 210200 – автоматизация технологических процессов и производств
Направления подготовки бакалавров: 551500 – приборостроение 552900 – технология, оборудование и автоматизация
Санкт-Петербург Утверждено редакционно-издательским советом университета
УДК 621.01 (07)
Прикладная механика: Задание и методические указания к выполнению курсового проекта (спец. 190100), курсовой работы (спец.210200). – СПб: СЗТУ, 2003 – 38 с.
Задания и методические указания разработаны на основании государственных образовательных стандартов высшего профессионального образования по направлениям подготовки дипломированных специалистов: 653700, 657900 (специальности: 190100, 210200) и направлениям подготовки бакалавров: 551500, 552900.
Курсовой проект (курсовая работа) предусматривает решение комплексной задачи по проектированию механизмов контрольно-измерительного автомата. В процессе выполнения работы студенты знакомятся с последовательностью расчетов, приобретают навыки кинематического и динамического анализа и синтеза механизмов, оформляют чертежи и пояснительную записку.
Рассмотрено на заседании кафедры теоретической и прикладной механики 26.12 2002; одобрено методической комиссией машиностроительного факультета от 23 июня 2003 года.
Рецензенты: кафедра теоретической и прикладной механики СЗТУ (заведующий кафедрой В.В.Гурецкий, д-р техн. наук, проф.); А.В. Троицкий, д-р техн. наук, проф., нач. лаборатории ЦНИИ им. А.Н. Крылова.
Составители: К.У. Кутыев, канд. техн. наук, доц; А.И. Иванов, канд. техн. наук, доц; О.А. Румянцев, канд. техн. наук, доц.
© Северо-Западный государственный заочный технический университет, 2003
ВВЕДЕНИЕ
Курсовой проект (курсовая работа) предусматривает решение комплексной задачи, охватывающей основные разделы дисциплины «Прикладная механика». В процессе выполнения задания студент должен познакомиться с последовательностью расчетов агрегатов, машин, механизмов и деталей общего назначения; приобрести навыки структурного, кинематического и динамического исследования агрегата в целом; выполнить инженерные расчеты механизмов контрольно-измерительного автомата; приобрести навыки оформления чертежей и пояснительной записки.
I. ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ (КУРСОВУЮ РАБОТУ)
По заданной кинематической схеме и исходным данным спроектировать механизмы поворота стола контрольно-измерительного автомата (КИА), рис.1…5. Кинематическая схема включает планетарную зубчатую передачу, коническую зубчатую пару, мальтийский и кривошипно-ползунный механизмы. Каждый студент выполняет курсовой проект (курсовую работу) по индивидуальному заданию, вариант которого определяется двумя последними цифрами шифра. Производительность автомата, схема планетарной передачи, число сателлитов и некоторые параметры механизмов выбираются по предпоследней цифре шифра студента по табл.1. Моменты сил сопротивления, моменты инерции, а также другие данные определяются последней цифрой шифра по табл.2. В содержание курсовой работы студентов специальности 210200 не входят расчеты по разделам и подразделам: 6.1.3, 6.2.3, 8, 9, а также сокращается соответствующая им графическая часть. Допускается выбор темы задания, имеющей практическое значение для организации, в которой работает студент. В этом случае студент должен предварительно согласовать содержание и получить разрешение руководителя на выполнение курсового проекта (курсовой работы) по выбранной теме. В табл. 1 и 2 приняты следующие обозначения:
Рис.3 Рис.4
ИСХОДНЫЕ ДАННЫЕ Т а б л и ц а 1
ИСХОДНЫЕ ДАННЫЕ Т а б л и ц а 2
2. ОПИСАНИЕ РАБОТЫ КИА
Многопозиционные КИА предназначены для контроля и сортировки деталей в процессе обработки в условиях автоматизированного крупносерийного и массового производства. В таких автоматах для повышения их производительности контроль параметров деталей осуществляется на нескольких позициях одновременно. На первой позиции выполняется загрузка, а на последней – выталкивание деталей. На измерительных позициях контролируются последовательно различные параметры одной и той же детали. На рис.5 изображена кинематическая схема четырехпозиционного автомата для измерения и контроля нескольких параметров деталей. Движение звеньев автомата осуществляется от ведущего вала 1 электродвигателя, связанного при помощи муфты с водилом Н планетарной передачи. От сателлита 2 с двумя зубчатыми венцами вращение передается на выходной вал передачи. Далее через соединительную муфту движение передается на вал 3, связанный цепной передачей с транспортирующим устройством (на рис.5 часть устройства показана пунктирными линиями). От вала 3 через коническую зубчатую пару вращение передается на вал 4 кривошипа мальтийского механизма. Для уменьшения неравномерности вращения на валу установлен маховик «М». Поворот вала 4 от входа цевки кривошипа в паз до выхода из паза называется углом рабочего поворота
Рис.5
Рис.6
ЦИКЛОГРАММА РАБОТЫ КИА Т а б л и ц а 3
0
    
В момент выхода цевки из паза вращение креста и стола прекращается. Неподвижное положение креста и стола фиксируется цилиндрической поверхностью диска кривошипа, которая при повороте скользит по сегментному вырезу креста. На конце вала 4 имеется другой кривошип «К», который посредством шатуна 6 связан с ползуном 7. По истечении времени
ЗАДАЧИ ПРОЕКТИРОВАНИЯ КИА
По исходным данным необходимо: 1. Разработать кинематическую схему автомата. 2. Выполнить его структурный анализ. 3. Выполнить кинематический анализ КИА, включающего планетарную передачу, мальтийский и кривошипно-ползунный механизмы. 4. Выполнить динамический анализ КИА с целью выбора электродвигателя и определения момента инерции маховика. 5. Произвести расчеты элементов механизмов КИА. 6. Выполнить графическую часть. 7. Оформить пояснительную записку. Ниже приводятся методические указания к выполнению курсового проекта (курсовой работы).
СТРУКТУРНЫЙ АНАЛИЗ
При структурном анализе выявляются и исключаются избыточные связи, которые могут привести к неработоспособности конструкции. Анализ выполняется по кинематической схеме, в которой кинематические пары должны быть изображены по ГОСТ с указанием всех геометрических связей, соответствующих виду и классу пар. При анализе не следует учитывать так называемые локальные связи. Например, если в реальной конструкции вал устанавливается на двух опорах, то при структурном анализе по кинематической схеме необходимо считать, что вал образует со стойкой вращательную пару 5-го класса. При нумерации звеньев на кинематической схеме рекомендуется обозначить ведущее звено первым, а стойку – последним номером. Для обозначения кинематических пар рекомендуется использовать заглавные буквы латинского алфавита. В тексте пояснительной записки следует перечислить все звенья с указанием наименований элементов, входящих в эти звенья, все кинематические пары с указанием вида и класса. Затем необходимо определить степень подвижности по формуле Чебышева
где Примеры составления кинематических схем и структурного анализа механизмов приведены в [1], с.23...41; [3], с.14...21; [4], с.28...52.
Мальтийского механизма
Перед построением планов скоростей и ускорений необходимо изобразить мальтийский механизм в выбранном масштабе. Построение следует выполнить для трех положений мальтийского механизма: а) для момента входа цевки кривошипа в паз креста, т.е. при б) для момента поворота кривошипа на ¼ рабочего угла, т.е. при в) для момента поворота кривошипа на ½ рабочего угла, т.е. когда ось кривошипа совмещается с линией, соединяющей оси валов 4 и 5. При построении планов скоростей и ускорений считаются заданными угловая скорость Используя результаты построения планов необходимо определить угловые скорости и угловые ускорения вала креста для указанных выше трех положений. В качестве примера рассмотрим построения планов скоростей и ускорений для положения кривошипа, изображенного на рис.7, а. Будем рассматривать точку В как точку, принадлежащую одновременно кривошипу и кресту. Движение точки В, принадлежащей кривошипу, считаем абсолютным. Точка В, принадлежащая кресту находится в сложном движении – в переносном вращательном с крестом и относительном прямолинейном вдоль паза креста. Построение планов скоростей ведем по следующему векторному уравнению:
где Выполним построение плана скоростей при положении кривошипа, когда он повернулся на ¼ рабочего угла. От полюса а)
б) в)
Рис.7
ваем от резок При построении плана скоростей для первого положения мальтийского механизма следует иметь в виду, что Строим план ускорений мальтийского механизма. При рассмотрении ускорения точки В, принадлежащей кресту, следует учесть, что при переносном вращательном движении и относительном перемещении вдоль паза возникает также ускорение Кориолиса. Поэтому построение плана ускорений ведем по следующему уравнению
где Выполним построение плана ускорений по векторному уравнению, в котором известны векторы От полюса Определим модуль вектора
При построении плана ускорений для первого положения мальтийского механизма обратим внимание на то, что Методика построения планов скоростей и ускорений звеньев механизмов приведена в [1], с.70...72, 75...80; [3], с.33...38; [4], с.79...96.
6.2. Кинематический анализ планетарной передачи
При проектировании планетарной передачи выбирается схема, число сателлитов к, передаточное отношение
Условия проектирования
При проектировании передачи необходимо удовлетворить следующим требованиям: 1. возможности размещения нескольких сателлитов с зазорами между ними (условию соседства); 2. соосности входного и выходного валов передачи (условию соосности); 3. возможности установки нескольких сателлитов при сборке при условии их нормального зацепления с центральными колесами (условию сборки). Кроме того, в зависимости от вида кинематической схемы могут быть дополнительные требования (получение наименьших габаритных размеров, наибольших передаточных отношений и др.). Условие соседства нескольких сателлитов будет выполнено, если
где Условие соосности входного и выходного валов передачи при одинаковых модулях зацепления и колесах, изготовленных без смещения исходного контура, будет выполнено, если: 1. 2. 3. 4.
Здесь Условие сборки будет обеспечено в передачах, изображенных на рис.1, 2, 3, если конструктивно сделать так, что относительное положение двух зубчатых колес каждого сателлита устанавливается независимо друг от друга при монтаже. В передаче, изображенной на рис.4, для обеспечения условия сборки необходимо или чтобы числа зубьев колес
Выбор числа зубьев
1. Передаточное отношение передачи с ведущим водилом (рис.1) определяется по формуле
Если принять Так как передаточное отношение простой передачи (при оставленном водиле н)
то подставляя в (6) числа зубьев
Решая это уравнение, после подстановки заданного значения 2. Передаточное отношение передачи с ведущим центральным колесом а (рис.2) определяется по формуле
Если принять
После вычисления 3. Передаточное отношение передачи с ведущим водилом (рис.3) определяется по формуле
Так как
Для получения рациональных габаритных размеров передачи при С целью уточнения заданного передаточного отношения планетарной передачи рекомендуется изменять числа зубьев колес в числителе и знаменателе выражений (5), (6), (8) и (9), не забывая проверять условие соосности. 4. В двухступенчатой передаче, изображенной на рис.4, рекомендуется принять
откуда
Принимая
Для обеспечения сборки необходимо уточнить число зубьев Число зубьев Отклонение полученного передаточного отношения после уточнения чисел зубьев колес в указанных передачах не должно превышать 3...5% от заданного. 5. После выбора чисел зубьев необходимо определить основные размеры планетарной передачи: Межосевые расстояния
диаметры делительных окружностей колес (здесь m – модуль зацепления, z – число зубьев соответствующего колеса), диаметры окружностей выступов колес На основании полученных данных следует проверить условие соседства нескольких сателлитов (по формуле 3) и условие соосности входного и выходного валов передачи (по формулам 4). Кинематический анализ, метода расчета параметров и выбора чисел зубьев колес планетарных передач приведены в [1], с. 406...410, 413...426; [3], с. 241...246, 252...255; [4], с. 154...166.
6.2.3. Построение плана скоростей планетарной передачи
Построение плана скоростей выполняется при заданной угловой скорости ведущего звена Перед построением планов скоростей следует изобразить кинематическую схему планетарной передачи в выбранном масштабе. Допускается строить план скоростей с изображением одного сателлита и центральных колес. На рис.8 изображена схема планетарной передачи с ведущим центральным колесом а. Сначала строим план линейных скоростей колес и водила. Для этого на вертикальную линию, изображенную справа от схемы, переносятся характерные точки О, Р,
зацеп
ления. Точка  совмещена с осью сателлита. совмещена с осью сателлита.
Рис.8
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 981; Нарушение авторского права страницы
 – производительность КИА (количество контролируемых деталей за один час);
– производительность КИА (количество контролируемых деталей за один час);  – передаточное отношение конической зубчатой пары;
– передаточное отношение конической зубчатой пары;  – число пазов мальтийского креста;
– число пазов мальтийского креста; 




















 – межосевое расстояние мальтийского механизма (рис.6);
– межосевое расстояние мальтийского механизма (рис.6);  – размеры вала 4;
– размеры вала 4;  – отношение длины r кривошипа к длине l шатуна кривошипно-ползунного механизма;
– отношение длины r кривошипа к длине l шатуна кривошипно-ползунного механизма;  . При этом крест со столом поворачивается на угол
. При этом крест со столом поворачивается на угол  .
.







 после остановки креста (см. табл. 3) при прямом ходе ползуна происходит выталкивание детали «Д» (см. рис.5). При неподвижном столе осуществляются следующие операции: контроль и измерение деталей на нескольких позициях, загрузка деталей на стол из бункера-накопителя и выталкивание при помощи ползуна 7 проконтролированной детали в лоток (бункер и лоток на рисунке не показаны). Продвижение деталей от предыдущих к последующим позициям осуществляется при повторяющихся циклических поворотах стола. Вокруг стола размещены измерительные станции (на рис.5 не показаны), которые работают с одинаковой длительностью контроля. Время
после остановки креста (см. табл. 3) при прямом ходе ползуна происходит выталкивание детали «Д» (см. рис.5). При неподвижном столе осуществляются следующие операции: контроль и измерение деталей на нескольких позициях, загрузка деталей на стол из бункера-накопителя и выталкивание при помощи ползуна 7 проконтролированной детали в лоток (бункер и лоток на рисунке не показаны). Продвижение деталей от предыдущих к последующим позициям осуществляется при повторяющихся циклических поворотах стола. Вокруг стола размещены измерительные станции (на рис.5 не показаны), которые работают с одинаковой длительностью контроля. Время  цикла (см. табл.3) соответствует длительности одного оборота кривошипного вала 4. За каждый цикл в лоток сбрасывается одна проконтролированная деталь и подается из бункера на стол новая. При этом полный контроль (включая загрузку и выталкивание) одной детали на многопозиционном автомате выполняется за
цикла (см. табл.3) соответствует длительности одного оборота кривошипного вала 4. За каждый цикл в лоток сбрасывается одна проконтролированная деталь и подается из бункера на стол новая. При этом полный контроль (включая загрузку и выталкивание) одной детали на многопозиционном автомате выполняется за  (здесь
(здесь  – число пазов креста).
– число пазов креста). ,
,  – число подвижных звеньев;
– число подвижных звеньев;  – число кинематических пар соответственно 5-го и 4-го классов.
– число кинематических пар соответственно 5-го и 4-го классов. ;
;  ;
;  , угол рабочего поворота вала кривошипа
, угол рабочего поворота вала кривошипа  , число пазов креста
, число пазов креста  .
.  ,
,  – вектор абсолютной скорости точки В, равный по модулю
– вектор абсолютной скорости точки В, равный по модулю  и направленный перпендикулярно АВ;
и направленный перпендикулярно АВ;  – вектор переносной скорости точки В, равный по модулю
– вектор переносной скорости точки В, равный по модулю  и направленный перпендикулярно ВС;
и направленный перпендикулярно ВС;  – вектор относительной скорости точки В, направленный параллельно ВС.
– вектор относительной скорости точки В, направленный параллельно ВС. (рис.7, б) отклады-
(рис.7, б) отклады-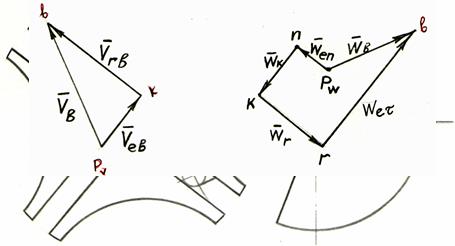
 , изображающий в определенном масштабе вектор скорости
, изображающий в определенном масштабе вектор скорости  , причем если
, причем если  изменяется в м/c, то масштабный коэффициент
изменяется в м/c, то масштабный коэффициент  – в
– в  . (
. (  ). Затем из точки
). Затем из точки  (м/c). Так как скорость
(м/c). Так как скорость  зависит от угловой скорости
зависит от угловой скорости  креста, то величина угловой скорости
креста, то величина угловой скорости 
 (1/c). Здесь
(1/c). Здесь  – расстояние от точки В до центра вращения креста в м.
– расстояние от точки В до центра вращения креста в м. , а для третьего положения –
, а для третьего положения –  .
. ,
,  – вектор абсолютного ускорения, равный нормальному ускорению точки В (при
– вектор абсолютного ускорения, равный нормальному ускорению точки В (при  ), принадлежащей кривошипу, равный по модулю
), принадлежащей кривошипу, равный по модулю  и направленный по АВ от точки В к точке А;
и направленный по АВ от точки В к точке А;  – вектор нормального ускорения в переносном вращательном движении точки В, принадлежащей кресту, равный по модулю
– вектор нормального ускорения в переносном вращательном движении точки В, принадлежащей кресту, равный по модулю  и направленный от точки В к точке С;
и направленный от точки В к точке С;  – вектор касательного ускорения в переносном движении, направленный перпендикулярно СВ;
– вектор касательного ускорения в переносном движении, направленный перпендикулярно СВ;  – вектор относительного ускорения точки В, направленный вдоль паза креста по СВ;
– вектор относительного ускорения точки В, направленный вдоль паза креста по СВ;  – вектор ускорения Кориолиса, равный по модулю
– вектор ускорения Кориолиса, равный по модулю 
 и имеющий направление вектора
и имеющий направление вектора  в направлении угловой скорости
в направлении угловой скорости  по направлениям и модулям. Для векторов
по направлениям и модулям. Для векторов  известны лишь линии их действия.
известны лишь линии их действия. откладываем отрезок
откладываем отрезок  , который изображает на плане в определенном масштабе вектор
, который изображает на плане в определенном масштабе вектор 
 .
.  показывает, сколько единиц ускорения в
показывает, сколько единиц ускорения в  приходится на 1мм отрезка
приходится на 1мм отрезка  , изображающий вектор
, изображающий вектор  (
(  (
(  ).
). ,
,  ,
,  и что для третьего положения
и что для третьего положения  ,
,  и модуль зацепления т (для всех заданий следует принять
и модуль зацепления т (для всех заданий следует принять  ).
). , (3)
, (3) – диаметр окружности выступов венца сателлита,
– диаметр окружности выступов венца сателлита,  – расстояние между осями центрального колеса и сателлита, мм.
– расстояние между осями центрального колеса и сателлита, мм. – для передачи на рис.1;
– для передачи на рис.1;  – для передачи на рис.2; (4)
– для передачи на рис.2; (4) – для передачи на рис.3;
– для передачи на рис.3;  ,
,  – для передачи на рис.4.
– для передачи на рис.4. – числа зубьев соответственно колес а, b, f, q.
– числа зубьев соответственно колес а, b, f, q. и
и  в каждой ступени были кратны числу сателлитов к, или чтобы
в каждой ступени были кратны числу сателлитов к, или чтобы  равнялось целому числу.
равнялось целому числу. . (5)
. (5) , то для обеспечения соосности и минимальных габаритов рекомендуется
, то для обеспечения соосности и минимальных габаритов рекомендуется  .
. , (6)
, (6) , выраженные через z, получим уравнение
, выраженные через z, получим уравнение . (7)
. (7) определим z. Из двух значений z после округления до целого числа следует принять наибольшее.
определим z. Из двух значений z после округления до целого числа следует принять наибольшее. . (8)
. (8) , то на основании условия соосности числа зубьев колес b и q определяются по формулам
, то на основании условия соосности числа зубьев колес b и q определяются по формулам ,
,  .
. их следует округлить до целых значений (соблюдая условие соосности).
их следует округлить до целых значений (соблюдая условие соосности). . (9)
. (9) , то
, то . (10)
. (10) рекомендуется принять
рекомендуется принять  ,
,  . На основании условия соосности в этом случае
. На основании условия соосности в этом случае  . При заданном значении
. При заданном значении  после подстановки принятых значений
после подстановки принятых значений  и
и  ,
,  ,
,  . Тогда передаточное отношение передачи с ведущим центральным колесом
. Тогда передаточное отношение передачи с ведущим центральным колесом  равно
равно , (11)
, (11) .
. (желательно, чтобы
(желательно, чтобы  .
. равнялось целому числу.
равнялось целому числу. . После округления
. После округления  (для схем на рис. 1, 2, 4),
(для схем на рис. 1, 2, 4),  (для схемы на рис. 3),
(для схемы на рис. 3),  ,
,  .
.
