
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ КИА
При выполнении кинематического анализа исходными данными являются параметры – время одного цикла – угловую скорость – передаточное отношение – передаточное отношение – угловую скорость Так как время одного оборота кривошипного вала определяет длительность одного цикла контроля детали, то время одного цикла равно, с,
Угловая скорость кривошипного вала 4, 1/c,
Передаточное отношение между валами 1 и 4 равно
Передаточное отношение планетарной передачи
Угловая скорость вала 3, 1/c,
Примеры определения угловых скоростей, передаточных отношений между звеньями кинематических цепей механизмов приведены в [1], с.58...65; [3], с.23...26; [4], с.68...73.
Кинематический анализ мальтийского механизма
Перед разработкой конструкции мальтийского механизма следует определить основные параметры и выполнить его кинематический анализ. Исходными данными являются параметры – угол поворота креста за один оборот кривошипного вала, – угол рабочего поворота кривошипа, – геометрические размеры мальтийского механизма, – угловую скорость и угловое ускорение креста.
Определение основных параметров
Угол поворота
Угол рабочего поворота
Угол выемки фиксирующего диска, град.,
Длина кривошипа, мм,
Расстояние от оси вращения креста до начала паза, мм,
Диаметр цевки кривошипа, мм,
Диаметр креста, мм,
где С – фаска, равная 1, 5...2 мм. Длина паза креста, мм,
Диаметры валов кривошипа и креста принимают конструктивно, соблюдая условия, мм,
При разработке конструкции в дальнейшем Отношение длины
Диаметр скользящей поверхности диска кривошипа, мм,
Определение угловой скорости и углового ускорения креста
Угловая скорость креста мальтийского механизма зависит от угла рабочего поворота
Угловое ускорение определяется по формуле, 1/с
Расчеты по формулам (1) и (2) необходимо выполнить при значении
соответствующем входу цевки кривошипа в паз креста, до
соответствующем выходу цевки из паза. Нулевое значение угла Результаты расчетов рекомендуется свести в таблицы. По этим данным построить диаграммы Указания по расчету основных параметров мальтийского механизма, определению угловой скорости и ускорения креста приведены в [1], с.438...442; [3], с.293...297; [4], с.172...174. 6.1.3. Построение планов скоростей и ускорений звеньев Мальтийского механизма
Перед построением планов скоростей и ускорений необходимо изобразить мальтийский механизм в выбранном масштабе. Построение следует выполнить для трех положений мальтийского механизма: а) для момента входа цевки кривошипа в паз креста, т.е. при б) для момента поворота кривошипа на ¼ рабочего угла, т.е. при в) для момента поворота кривошипа на ½ рабочего угла, т.е. когда ось кривошипа совмещается с линией, соединяющей оси валов 4 и 5. При построении планов скоростей и ускорений считаются заданными угловая скорость Используя результаты построения планов необходимо определить угловые скорости и угловые ускорения вала креста для указанных выше трех положений. В качестве примера рассмотрим построения планов скоростей и ускорений для положения кривошипа, изображенного на рис.7, а. Будем рассматривать точку В как точку, принадлежащую одновременно кривошипу и кресту. Движение точки В, принадлежащей кривошипу, считаем абсолютным. Точка В, принадлежащая кресту находится в сложном движении – в переносном вращательном с крестом и относительном прямолинейном вдоль паза креста. Построение планов скоростей ведем по следующему векторному уравнению:
где Выполним построение плана скоростей при положении кривошипа, когда он повернулся на ¼ рабочего угла. От полюса а)
б) в)
Рис.7
ваем от резок При построении плана скоростей для первого положения мальтийского механизма следует иметь в виду, что Строим план ускорений мальтийского механизма. При рассмотрении ускорения точки В, принадлежащей кресту, следует учесть, что при переносном вращательном движении и относительном перемещении вдоль паза возникает также ускорение Кориолиса. Поэтому построение плана ускорений ведем по следующему уравнению
где Выполним построение плана ускорений по векторному уравнению, в котором известны векторы От полюса Определим модуль вектора
При построении плана ускорений для первого положения мальтийского механизма обратим внимание на то, что Методика построения планов скоростей и ускорений звеньев механизмов приведена в [1], с.70...72, 75...80; [3], с.33...38; [4], с.79...96.
6.2. Кинематический анализ планетарной передачи
При проектировании планетарной передачи выбирается схема, число сателлитов к, передаточное отношение
Условия проектирования
При проектировании передачи необходимо удовлетворить следующим требованиям: 1. возможности размещения нескольких сателлитов с зазорами между ними (условию соседства); 2. соосности входного и выходного валов передачи (условию соосности); 3. возможности установки нескольких сателлитов при сборке при условии их нормального зацепления с центральными колесами (условию сборки). Кроме того, в зависимости от вида кинематической схемы могут быть дополнительные требования (получение наименьших габаритных размеров, наибольших передаточных отношений и др.). Условие соседства нескольких сателлитов будет выполнено, если
где Условие соосности входного и выходного валов передачи при одинаковых модулях зацепления и колесах, изготовленных без смещения исходного контура, будет выполнено, если: 1. 2. 3. 4.
Здесь Условие сборки будет обеспечено в передачах, изображенных на рис.1, 2, 3, если конструктивно сделать так, что относительное положение двух зубчатых колес каждого сателлита устанавливается независимо друг от друга при монтаже. В передаче, изображенной на рис.4, для обеспечения условия сборки необходимо или чтобы числа зубьев колес
Выбор числа зубьев
1. Передаточное отношение передачи с ведущим водилом (рис.1) определяется по формуле
Если принять Так как передаточное отношение простой передачи (при оставленном водиле н)
то подставляя в (6) числа зубьев
Решая это уравнение, после подстановки заданного значения 2. Передаточное отношение передачи с ведущим центральным колесом а (рис.2) определяется по формуле
Если принять
После вычисления 3. Передаточное отношение передачи с ведущим водилом (рис.3) определяется по формуле
Так как
Для получения рациональных габаритных размеров передачи при С целью уточнения заданного передаточного отношения планетарной передачи рекомендуется изменять числа зубьев колес в числителе и знаменателе выражений (5), (6), (8) и (9), не забывая проверять условие соосности. 4. В двухступенчатой передаче, изображенной на рис.4, рекомендуется принять
откуда
Принимая
Для обеспечения сборки необходимо уточнить число зубьев Число зубьев Отклонение полученного передаточного отношения после уточнения чисел зубьев колес в указанных передачах не должно превышать 3...5% от заданного. 5. После выбора чисел зубьев необходимо определить основные размеры планетарной передачи: Межосевые расстояния
диаметры делительных окружностей колес (здесь m – модуль зацепления, z – число зубьев соответствующего колеса), диаметры окружностей выступов колес На основании полученных данных следует проверить условие соседства нескольких сателлитов (по формуле 3) и условие соосности входного и выходного валов передачи (по формулам 4). Кинематический анализ, метода расчета параметров и выбора чисел зубьев колес планетарных передач приведены в [1], с. 406...410, 413...426; [3], с. 241...246, 252...255; [4], с. 154...166.
6.2.3. Построение плана скоростей планетарной передачи
Построение плана скоростей выполняется при заданной угловой скорости ведущего звена Перед построением планов скоростей следует изобразить кинематическую схему планетарной передачи в выбранном масштабе. Допускается строить план скоростей с изображением одного сателлита и центральных колес. На рис.8 изображена схема планетарной передачи с ведущим центральным колесом а. Сначала строим план линейных скоростей колес и водила. Для этого на вертикальную линию, изображенную справа от схемы, переносятся характерные точки О, Р,
зацеп
ления. Точка  совмещена с осью сателлита. совмещена с осью сателлита.
Рис.8 Отложим отрезок Далее строим план угловых скоростей звеньев планетарной передачи. Под планом линейных скоростей проводим прямую, перпендикулярную прямой OQ. Из принятой за начало отсчета точки Е восстанавливаем перпендикуляр и откладываем на нем отрезок ЕМ произвольной длины. Через точку М проводим прямые под углами План скоростей планетарной двухступенчатой передачи (рис.4) следует строить только для первой ступени. При этом необходимо определить угловые скорости сателлита Примеры построения планов скоростей планетарных передач приведены в [1], с. 72...75, с.410...413; [3], с.246...247.
6.3. Кинематический анализ кривошипно-ползунного механизма
По исходным данным Кинематический анализ сводится к определению скорости движения ползуна Скорость перемещения ползуна следует определить по приближенной формуле, м/c,
При расчетах по формуле (12) значения угла Примеры определения кинематических характеристик кривошипно-ползунного механизма приведены в [1], с. 92...98; [4], с. 103...107.
7. ДИНАМИЧЕСКИЙ АНАЛИЗ
При динамическом анализе на основании предыдущих расчетов и исходных данных ставится задача определения мощности движущих сил, выбора электродвигателя и определения момента инерции маховика.
7.1. Определение приведенного момента сил
Суммарный момент, приведенный к кривошипному валу 4, включает приведенный момент сил сопротивлений и приведенный момент сил инерции масс, вращающихся с ускорениями
При определении приведенного момента сил сопротивлений учитываются момент сил сопротивления транспортирующего устройства; моменты сил трения в опорах валов 4, 5; силы сопротивления при выталкивании деталей в лоток. Таким образом, приведенный к валу 4 момент сил сопротивления равен
где
Для упрощения расчетов считать, что сила
Расчеты по формулам (13), (14) рекомендуется выполнять при При расчетах Результаты вычислений по формулам (13), (14), (15), (16), (17) следует представить в виде сводной таблицы.
По данным вычислений на одном графике (см. рис.9) в пределах изменения угла 
Рис.9
от 0 до
Исследование движения машинного агрегата, определение его приведенного момента изложено в [1], с. 140...150, 153...156; [4], с. 201...212, 324...336, 349...356.
7.2. Определение мощности движущих сил и выбор электродвигателя
При определении мощности сил
Здесь
Здесь Потери мощности в планетарных передачах при условии неподвижности одного из центральных колес зависят от вида схемы и коэффициента потерь В зависимости от схемы Т а б л и ц а 4 РАСЧЕТНЫЕ ФОРМУЛЫ
При вычислениях КПД по формулам в табл.4, рекомендуется для схем, представленных на рис.1 и 3, принять Минимальное значение мощности электродвигателя равно
По мощности Определение мощности движущих сил в механизмах, расчет КПД планетарных передач приведены в [1], с.164...167; [3], с.254...256; [4], с.308...313, 319...324. Т а б л и ц а 5 ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
7.3. Приведение моментов инерции звеньев и определение момента инерции маховика
Из-за непостоянства моментов сил сопротивлений в механизмах КИА отсутствует равенство между мгновенными значениями моментов сил движущих и сил сопротивлений, что вызывает неравномерность движения звеньев механизмов. С целью уменьшения неравномерности движения необходимо увеличить момент инерции вращающихся масс, что достигается путем установки маховика. Приведенный к кривошипному валу 4 момент инерции равен
где
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1100; Нарушение авторского права страницы
 . На основании этих данных следует определить:
. На основании этих данных следует определить:  ,
,  вала 4,
вала 4,  между валами 1 и 4,
между валами 1 и 4,  планетарной передачи,
планетарной передачи,  вала 3.
вала 3. .
. .
. .
. .
. .
. ,
,  ,
,  креста за один оборот кривошипного вала вычисляется по формуле (см. рис.6), град,
креста за один оборот кривошипного вала вычисляется по формуле (см. рис.6), град,  .
. кривошипа, при котором происходит поворот креста, равен, град,
кривошипа, при котором происходит поворот креста, равен, град,  .
. .
. .
. .
. .
. ,
,  .
. ,
,  .
. и
и  проверяют расчетами на прочность.
проверяют расчетами на прочность. кривошипа к межосевому расстоянию равно
кривошипа к межосевому расстоянию равно .
. .
. . (1)
. (1) ,
,  . (2)
. (2) от
от ,
,  ,
,  и
и  .
. ;
;  и длина кривошипа
и длина кривошипа 
 ,
,  – вектор абсолютной скорости точки В, равный по модулю
– вектор абсолютной скорости точки В, равный по модулю  и направленный перпендикулярно АВ;
и направленный перпендикулярно АВ;  – вектор переносной скорости точки В, равный по модулю
– вектор переносной скорости точки В, равный по модулю  и направленный перпендикулярно ВС;
и направленный перпендикулярно ВС;  – вектор относительной скорости точки В, направленный параллельно ВС.
– вектор относительной скорости точки В, направленный параллельно ВС. (рис.7, б) отклады-
(рис.7, б) отклады-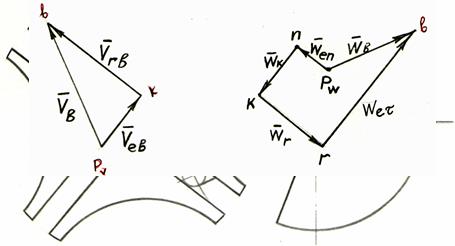
 , изображающий в определенном масштабе вектор скорости
, изображающий в определенном масштабе вектор скорости  , причем если
, причем если  изменяется в м/c, то масштабный коэффициент
изменяется в м/c, то масштабный коэффициент  – в
– в  . (
. (  ). Затем из точки
). Затем из точки  (м/c). Так как скорость
(м/c). Так как скорость  зависит от угловой скорости
зависит от угловой скорости  креста, то величина угловой скорости
креста, то величина угловой скорости 
 (1/c). Здесь
(1/c). Здесь  – расстояние от точки В до центра вращения креста в м.
– расстояние от точки В до центра вращения креста в м. , а для третьего положения –
, а для третьего положения –  .
. ,
,  – вектор абсолютного ускорения, равный нормальному ускорению точки В (при
– вектор абсолютного ускорения, равный нормальному ускорению точки В (при  ), принадлежащей кривошипу, равный по модулю
), принадлежащей кривошипу, равный по модулю  и направленный по АВ от точки В к точке А;
и направленный по АВ от точки В к точке А;  – вектор нормального ускорения в переносном вращательном движении точки В, принадлежащей кресту, равный по модулю
– вектор нормального ускорения в переносном вращательном движении точки В, принадлежащей кресту, равный по модулю  и направленный от точки В к точке С;
и направленный от точки В к точке С;  – вектор касательного ускорения в переносном движении, направленный перпендикулярно СВ;
– вектор касательного ускорения в переносном движении, направленный перпендикулярно СВ;  – вектор относительного ускорения точки В, направленный вдоль паза креста по СВ;
– вектор относительного ускорения точки В, направленный вдоль паза креста по СВ;  – вектор ускорения Кориолиса, равный по модулю
– вектор ускорения Кориолиса, равный по модулю 
 и имеющий направление вектора
и имеющий направление вектора  в направлении угловой скорости
в направлении угловой скорости  по направлениям и модулям. Для векторов
по направлениям и модулям. Для векторов  известны лишь линии их действия.
известны лишь линии их действия. откладываем отрезок
откладываем отрезок  , который изображает на плане в определенном масштабе вектор
, который изображает на плане в определенном масштабе вектор 
 .
.  показывает, сколько единиц ускорения в
показывает, сколько единиц ускорения в  приходится на 1мм отрезка
приходится на 1мм отрезка  , изображающий вектор
, изображающий вектор  (
(  (
(  ).
). ,
,  ,
,  и что для третьего положения
и что для третьего положения  ,
,  ).
). , (3)
, (3) – диаметр окружности выступов венца сателлита,
– диаметр окружности выступов венца сателлита,  – расстояние между осями центрального колеса и сателлита, мм.
– расстояние между осями центрального колеса и сателлита, мм. – для передачи на рис.1;
– для передачи на рис.1;  – для передачи на рис.2; (4)
– для передачи на рис.2; (4) – для передачи на рис.3;
– для передачи на рис.3;  ,
,  – для передачи на рис.4.
– для передачи на рис.4. – числа зубьев соответственно колес а, b, f, q.
– числа зубьев соответственно колес а, b, f, q. и
и  в каждой ступени были кратны числу сателлитов к, или чтобы
в каждой ступени были кратны числу сателлитов к, или чтобы  равнялось целому числу.
равнялось целому числу. . (5)
. (5) , то для обеспечения соосности и минимальных габаритов рекомендуется
, то для обеспечения соосности и минимальных габаритов рекомендуется  .
. , (6)
, (6) , выраженные через z, получим уравнение
, выраженные через z, получим уравнение . (7)
. (7) определим z. Из двух значений z после округления до целого числа следует принять наибольшее.
определим z. Из двух значений z после округления до целого числа следует принять наибольшее. . (8)
. (8) , то на основании условия соосности числа зубьев колес b и q определяются по формулам
, то на основании условия соосности числа зубьев колес b и q определяются по формулам ,
,  .
. их следует округлить до целых значений (соблюдая условие соосности).
их следует округлить до целых значений (соблюдая условие соосности). . (9)
. (9) , то
, то . (10)
. (10) рекомендуется принять
рекомендуется принять  ,
,  . На основании условия соосности в этом случае
. На основании условия соосности в этом случае  . При заданном значении
. При заданном значении  после подстановки принятых значений
после подстановки принятых значений  и
и  ,
,  ,
,  . Тогда передаточное отношение передачи с ведущим центральным колесом
. Тогда передаточное отношение передачи с ведущим центральным колесом  равно
равно , (11)
, (11) .
. (желательно, чтобы
(желательно, чтобы  .
. равнялось целому числу.
равнялось целому числу. . После округления
. После округления  (для схем на рис. 1, 2, 4),
(для схем на рис. 1, 2, 4),  (для схемы на рис. 3),
(для схемы на рис. 3),  ,
,  .
. и известных геометрических размерах планетарной передачи. По планам скоростей определяются угловые скорости ведомого звена и сателлита.
и известных геометрических размерах планетарной передачи. По планам скоростей определяются угловые скорости ведомого звена и сателлита.

 длиной
длиной  , где
, где  ;
;  – масштабный коэффициент,
– масштабный коэффициент,  и О отрезком под углом
и О отрезком под углом  , получим прямую
, получим прямую  распределения линейных скоростей колеса а. Точка
распределения линейных скоростей колеса а. Точка  является мгновенным центром вращения колес b и f в абсолютном движении. Соединив точки Q и
является мгновенным центром вращения колес b и f в абсолютном движении. Соединив точки Q и  , получим прямую распределения линейных скоростей колес f и q. На этой прямой лежит точка
, получим прямую распределения линейных скоростей колес f и q. На этой прямой лежит точка  – конец вектора
– конец вектора  соответствующего линейной скорости точки
соответствующего линейной скорости точки  , получим прямую распределения линейных скоростей водила Н.
, получим прямую распределения линейных скоростей водила Н. ,
,  ,
,  ,
,  . Масштабный коэффициент
. Масштабный коэффициент 
 . Угловые скорости водила и сателлита будут равны соответственно
. Угловые скорости водила и сателлита будут равны соответственно  ,
,  . Из плана скоростей видно, что векторы угловых скоростей
. Из плана скоростей видно, что векторы угловых скоростей  и водила
и водила  .
. и
и  следует определить ход ползуна
следует определить ход ползуна  и длину шатуна
и длину шатуна  .
.
 и построению кривой скорости в зависимости от угла
и построению кривой скорости в зависимости от угла  . (12)
. (12) (при прямом ходе ползуна). Прямой ход происходит за время
(при прямом ходе ползуна). Прямой ход происходит за время  (см. циклограмму в табл.3). Расчеты рекомендуется свести в таблицу. По результатам расчетов необходимо построить диаграмму скорости
(см. циклограмму в табл.3). Расчеты рекомендуется свести в таблицу. По результатам расчетов необходимо построить диаграмму скорости  . (13)
. (13) , (14)
, (14) – приведенный момент силы сопротивления транспортирующего устройства,
– приведенный момент силы сопротивления транспортирующего устройства,  ;
;  .
. – момент сил трения в опорах вала 4,
– момент сил трения в опорах вала 4,  – приведенный момент сил трения в опорах вала 5. Этот момент возникает при вращении креста со столом и изменяется в зависимости от угла рабочего поворота кривошипного вала,
– приведенный момент сил трения в опорах вала 5. Этот момент возникает при вращении креста со столом и изменяется в зависимости от угла рабочего поворота кривошипного вала,  . (15)
. (15) – приведенный момент сил сопротивления, возникающий при выталкивании детали ползуном при прямом ходе,
– приведенный момент сил сопротивления, возникающий при выталкивании детали ползуном при прямом ходе, 
 . (16)
. (16) передается на шейку кривошипа и постоянна по величине.
передается на шейку кривошипа и постоянна по величине. – приведенный момент сил инерции креста и стола, вращающегося с ускорениями. Этот момент зависит от угла рабочего поворота кривошипного вала и определяется по формуле,
– приведенный момент сил инерции креста и стола, вращающегося с ускорениями. Этот момент зависит от угла рабочего поворота кривошипного вала и определяется по формуле,  . (17)
. (17) , а по формуле (16) – от нуля до
, а по формуле (16) – от нуля до  ,
,  ,
,  по формуле (16) необходимо учесть следующее: нулевое значение
по формуле (16) необходимо учесть следующее: нулевое значение  ) должно соответствовать значению угла
) должно соответствовать значению угла  . Нулевое значение
. Нулевое значение  после точки, соответствующей началу состояния покоя креста. Поворот на
после точки, соответствующей началу состояния покоя креста. Поворот на  (см. циклограмму, табл.3).
(см. циклограмму, табл.3).
 и прямую, определяющую среднее значение приведенного момента сил сопротивления за цикл движения
и прямую, определяющую среднее значение приведенного момента сил сопротивления за цикл движения .
. следует исходить из того, что за цикл работа движущих сил равна работе сил сопротивлений, в том числе с учетом сил сопротивлений в зубчатых передачах
следует исходить из того, что за цикл работа движущих сил равна работе сил сопротивлений, в том числе с учетом сил сопротивлений в зубчатых передачах .
. – мощность сил сопротивлений, кВт,
– мощность сил сопротивлений, кВт,  .
. – КПД зубчатых передач. Так как коническая зубчатая пара и планетарная передача соединены последовательно, то
– КПД зубчатых передач. Так как коническая зубчатая пара и планетарная передача соединены последовательно, то . (18)
. (18) – КПД конической зубчатой пары (следует принять
– КПД конической зубчатой пары (следует принять  );
);  – КПД планетарной передачи.
– КПД планетарной передачи. простой передачи, полученной из планетарной остановкой водила.
простой передачи, полученной из планетарной остановкой водила.


 ; а на рис. 2 и 4 –
; а на рис. 2 и 4 –  .
. . (19)
. (19) и заданной угловой скорости
и заданной угловой скорости  и частоту вращения вала
и частоту вращения вала  , используемых при последующих расчетах.
, используемых при последующих расчетах.
 ,
,  – приведенный к кривошипному валу момент инерции звеньев механизма,
– приведенный к кривошипному валу момент инерции звеньев механизма,  – момент инерции маховика, установленного н
– момент инерции маховика, установленного н