|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Конструктивно-функциональная классификация механизмов
Согласно этой классификации механизмы можно разделить на пять основных видов: рычажные, кулачковые, фрикционные, зубчатые механизмы и механизмы с гибкими звеньями. К рычажным механизмам относятся механизмы, звенья которых образуют только вращательные, поступательные, цилиндрические и сферические пары. На рис. II показаны схемы наиболее распространенных плоских рычажных механизмов – кривошипно-ползунного (рис.1.5 а), шарнирного четырехзвенника (рис.1.5 б), кулисного (рис.1.5 в).
Рис. 1.5
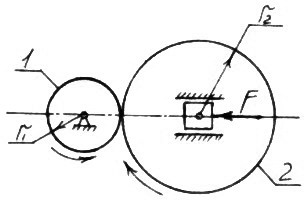
К кулачковым механизмам относятся механизмы, в состав которых входит кулачок, а кулачком называется звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. Кулачковые механизмы (рис.1.6) предназначены для преобразования вращательного или возвратно-поступательного движения входного эвена, которым, как правило, является кулачок I, в возвратно-поступательное или возвратно-вращательное движение выходного звена-толкателя 2.
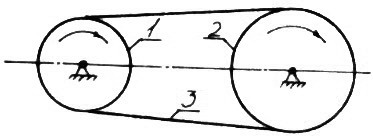
Основное достоинство кулачковых механизмов заключается в возможности получения практически любого закона движения толкателя за счет соответствующего выбора профиля кулачка. Во фрикционных механизмах движение от входного звена к выходному передается за счет сил трения, возникающих в местах контакта звеньев (высшая пара). К зубчатым механизмам относятся механизмы, в состав которых входят зубчатые звенья. Механизмы с гибкими связями применяют для передачи вращательного движения между валами при больших межосевых расстояниях Задачи и методы кинематического анализа механизмов. основные задачи сост. в определении перемещений, линейных и угловых скоростей и ускорений, звеньев механизма в зависимости от заданного закона движения входного звена (ведущего). По значению ускорений звеньев угловых и линейных, находят инерционные нагрузки, а затем проводят прочностные расчеты звеньев механизма. Для определения кинематических зависимостей в механике 1.Графический 2.Аналитический 3.Экпериментальный 1.Графический метод кинематического анализа механизма. Задана структурная схема мех-ма со всеми линейными размерами звеньев. Схема вычерчивается в линейном масштабе.
Выбираются масштабы линейной скорости Мех-м выч-ся в масштабе
ОВ’=ОА+АВ
Точки звеньев 1 кривошип; и 2-шатун лежащие по горизонтали наз-ся мертвым положением B’, B’’-точки мертвого положения Выводы: 1. При построении плана скоростей векторы абсолютных скоростей всегда начинаются из полюса плана В 2. На плане скоростей имеется ∆ подобно ∆ жесткого звена механизма. ∆ акb
Аналитический метод определения V и a звеньев заключается в сост. Замкнутого контура векторного в корд Х.У.- разработан ученым Зиновьевым
___ __ __ ___ ОС=ОА+АВ+ВС ОА=l1 м АВ=l2 м
Диф-я эти ур-ния по t находим линейные скорости и ускорения звеньев а также угловые скорости и ускорения.
Планетарные передачи. Устройство. Кинематический расчет. Теорема Виллиса. Механизмы, в составе которых имеется хотя бы одно колесо с перемещающейся в пространстве осью вращения, называются планетарными. Различают три вида таких механизмов: Рассмотрим один из простейших дифференциальных механизмов (рис.2.10).Звенья 1 и 3 – центральные колеса, 2 – сателлит, Н –водило. Водило Н и соосные с ним центральные колеса 1 и 3 называются основными звеньями.
Получим формулу, связывающую угловые скорости звеньев в дифференциальном механизме. Используем метод обращения движения. Сообщаем всем звеньям механизма дополнительную угловую скорость, равную угловой скорости водила Н, но противоположно направленную, т.е. (
Таким образом, так как
где
Полученное выражение(2.6) называется формулой Виллиса. В общем случае формула Виллиса имеет вид
Если в дифференциальном механизме одно из центральных колес сделать неподвижным, то получится планетарный механизм (рис. 2.11). Так как
Выражение(2.7) называется формулой Виллиса для планетарных механизмов. В общем случае она имеет вид
где индекс в соответствует неподвижному центральному колесу. Планетарные механизмы часто называются планетарными передачами. Они позволяют получать большие передаточные отношения при малых габаритах.
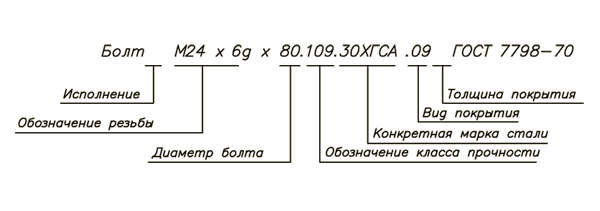
Детали машин Соединения 1.1.1.Резьбовые соединения. Резьбовые соединения относятся к разъёмным и выполняются посредством сверления в соединяемых деталях, в которые вставляются резьбовые крепёжные детали: болты, винты или шпильки. На выступающие концы болтов и шпилек навинчиваются гайки, затяжка которых обеспечивает соединение. При использовании винтов или шпилек в отверстиях одной из соединяемых деталей нарезается резьба. К видам крепёжных резьб относятся цилиндрическая метрическая, трубная цилиндрическая, коническая метрическая, коническая дюймовая с углом профиля 60 Резьба характеризуется следующими параметрами: диаметрами (наружным – d, D; средним - d2, D2; внутренним – d1, D1; d3 – внутренний диаметр болта по дну впадины) углом профиля в осевом сечении б, шагом P(расстояние между одноименными сторонами двух смежных профилей), числом заходов n (крепёжные резьбы однозаходные) и углом подъёма по среднему диаметру
По форме профиля крепежные резьбы бывают треугольные и круглые; резьбы винтовых механизмов (ходовые резьбы) - трапецеидальные, упорные, прямоугольные. Материалы резьбовых соединений выбирают в зависимости от условий работы (температура, среда) и характера нагрузки ( статическая, переменная), способа изготовления (литьё, штамповка, точение) и объема производства(единичное, массовое). Для стандартных крепёжных изделей общего назначения используются низко- и среднеуглеродистые стали обыкновенного качества. Для высоконагруженных соединений, работающих при переменных и ударных нагрузках, повышенных температурах и агрессивных средах, применяются качественные конструкционные и легированные стали. Прочность резьбовых соединений зависит от материала. Существует 12 классов прочности для винтов и 7 классов прочности для гаек, изготавливаемых из одинаковых сталей. Класс прочности болтов обозначен двумя числами. Первое число, умноженное на 100, определяет
Класс прочности гаек обозначен числом, которое при умножении на 100 дает значение напряжения от испытательной нагрузки (МПа). Обозначение гайки:
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 986; Нарушение авторского права страницы
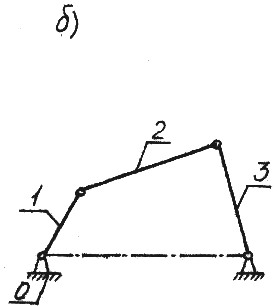

 Кривошип – вращающееся звено, которое может совершать полный оборот вокруг неподвижной оси (звено I на всех трех схемах). Шатун – звено, которое образует кинематические пары только с подвижными звеньями (звено 2 на рис.1.5). Ползун – звено, образующее поступательную пару со стойкой (звено 3 на рис.1.5). Коромысло – вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси (звено 3 на рис.1.5). Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару (звено 3 на рис. 1.5).
Кривошип – вращающееся звено, которое может совершать полный оборот вокруг неподвижной оси (звено I на всех трех схемах). Шатун – звено, которое образует кинематические пары только с подвижными звеньями (звено 2 на рис.1.5). Ползун – звено, образующее поступательную пару со стойкой (звено 3 на рис.1.5). Коромысло – вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси (звено 3 на рис.1.5). Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару (звено 3 на рис. 1.5).



 и ускорение
и ускорение  линейного и углового
линейного и углового а также n-ое число его положений.
а также n-ое число его положений. ОВ’’=АВ-ОА
ОВ’’=АВ-ОА ∆ AKB в плане схемы мех-ма
∆ AKB в плане схемы мех-ма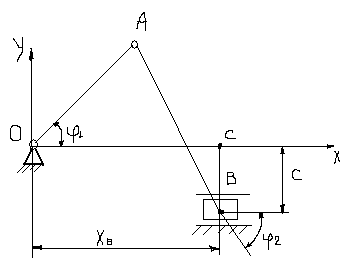 3. Векторы отн-ых скоростей соединяют концы векторов абсолютных скоростей и плане направлены к точке кот-ая стоит первой в обозн-ии отн-ой скорости
3. Векторы отн-ых скоростей соединяют концы векторов абсолютных скоростей и плане направлены к точке кот-ая стоит первой в обозн-ии отн-ой скорости

 ). При этом относительное движение звеньев не изменится, а угловые скорости в обращенном движении будут следующими:
). При этом относительное движение звеньев не изменится, а угловые скорости в обращенном движении будут следующими: 
 то дифференциальный механизм превратился в зубчатый механизм с неподвижными осями. Для такого обращенного механизма
то дифференциальный механизм превратился в зубчатый механизм с неподвижными осями. Для такого обращенного механизма (2.6)
(2.6) - передаточное отношение обращенного механизма, определяемое через число зубьев колес:
- передаточное отношение обращенного механизма, определяемое через число зубьев колес: 


 то из формулы
то из формулы получим:
получим: 

 (2.7)
(2.7) (2.8)
(2.8) и трубная коническая.
и трубная коническая. .
.
 -связь угла подъема с шагом, числом заходов и средним диаметром.
-связь угла подъема с шагом, числом заходов и средним диаметром. (МПа), а второе, деленное на 10, соответствует соотношению
(МПа), а второе, деленное на 10, соответствует соотношению  . Обозначение болта:
. Обозначение болта: