
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Несвободное тело. Связи. Реакция связей.Стр 1 из 5Следующая ⇒
Лекция 1. Теоретическая механика - это наука, в которой изучаются общие законы движения и взаимодействия материальных тел. Механическим движением называется перемещение тела по отношению к другому телу, происходящее в пространстве и во времени. Механическим взаимодействием называется такое взаимодействие материальных тел, которое изменяет или стремится изменить характер их механического движения. Теоретическая механика состоит из трех разделов. Статика изучает методы преобразования системы сил в эквивалентные системы и изучает условия равновесия сил, приложенных к твердому телу. Кинематика изучает движение материальных тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение. Динамика изучает движение материальных тел в пространстве в зависимости от действующих на них сил. Приступая к изучению механики, следует определить ее основные понятия. Материальное тело - это тело, которое занимает какой-то объем в пространстве. Материальная точка – это материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать. Материальная точка обладает массой и способностью взаимодействовать с другими телами. Системой материальных точек или механической системой называется такая совокупность материальных точек, в которой положение и движение каждой материальной точки зависит от положения и движения других точек этой системы. Абсолютно твердым телом называют такое материальное тело, геометрическая форма и размеры которого, не изменяются ни про каких механических воздействиях со стороны других тел. Сила – это векторная физическая величина, которая характеризует механические взаимодействия материальных тел.
Сила равная по модулю равнодействующей и направленная в противоположную сторону называется уравновешивающей силой.
Силы, действующие на механическую систему, делятся на внешние и внутренние. Внешними называются силы, действующие на материальные точки данной системы со стороны материальных точек, не входящих в данную систему. Внутренними называются силы взаимодействия между материальными точками рассматриваемой системы. Аксиомы статики. 1) Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка движется равномерно прямолинейно или находится в состоянии покоя. 2) Аксиома равновесия двух сил. Две силы, приложенные к твердому телу взаимноуравновешиваются только в том случае, если их модули равны и они направлены в разные стороны по одной прямой.
4) Аксиома параллелограмма сил. Равнодействующая пересекающихся сил, приложенная в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах:
5) Аксиома действия и противодействия. Всякому действию соответствует равное и противоположно направленное противодействие.
В природе не существует одностороннего действия сил. Будучи противоположными к разным телам эти силы не уравновешиваются. 6) Аксиома сохранения равновесия сил, приложенных к деформирующемуся телу сохраняется при его затвердении. Из этой аксиомы следует, что условия равновесия сил, приложенных к абсолютно твердому телу, должны выполняться и для сил, приложенных к деформируемому телу. Однако эти условия необходимы, но недостаточны. Лекция 2. Система сходящихся сил. Сходящимися называются силы, линии действия которых пересекаются в одной точке.
Для двух сходящихся сил строим параллелограмм. Построение параллелограмм можно заменить построением треугольника.
т.к.
Если на тело действует n-сходящихся сил, то все эти силы переносим в точку пересечения их линий действий и строим поочередно треугольник сил. Равнодействующая сходящихся сил приложена в точке пересечения линий действия сил и равна их геометрической сумме. Направление равнодействующей по контуру силового многоугольника противоположно направлению обхода этого контура, определяемому направлением первой силы.
Если к твердому телу приложены 3 сходящиеся силы, не лежащие в одной плоскости, то их равнодействующая приложена в точке пересечения линий действия сил и изображается диагональю параллелепипеда, построенного на этих силах.
Лекция 3.
Дано: тело с неподвижной т.О, в т.А приложена сила Момент силы Модуль этого вектора: где d – плечо - кратчайшее расстояние от т.О до линии действия силы. Модуль можно выразить Момент силы равен, нулю если d=0 Если в т.А провести
Вектор момента силы Лекция 4. Пара сил. Момент пары сил. Система двух равных по модулю, параллельных и противоположно направленных сил
Пара сил не имеет равнодействующей (силы пары не уравновешиваются, т.к. не направлены по одной прямой). Пара сил стремится произвести вращение твердого тела. Пара сил не имея равнодействующей, не может быть уравновешена силой.
d-плечо пары – кратчайшее расстояние между линиями действия сил. Действие пары сил на твердое тело характеризуется ее моментом. Момент пары сил определяется произведением модуля одной из сил на ее плечо:
момент пары изображается вектором. Вектор момента Если рассматривают пары, лежащие только в одной плоскости, то ее совмещают с плоскостью чертежа. Вместо вектора момента пары перпендикулярной к плоскости чертежа указывают только направление, в котором пара будет вращать плоскость.
Тогда «+», если против хода часовой стрелки «–», если по часовой стрелке.
СЛОЖЕНИЕ ПАР СИЛ. Система пар, действующих на твердое тело, эквивалентна одной паре, момент которой равен геометрической сумме моментов этих пар.
АВ – прямая пересечения плоскостей I и II. АВ=d
Найдем момент равнодействующий
но Следовательно: Если n пар, то Если же пары лежат водной плоскости, то эта система пар эквивалентна паре, лежащей в той же плоскости и момент её равен алгебраической сумме моментов этих пар. Условия равновесия пар сил. Для равновесия пар сил, действующих на твёрдое тело необходимо и достаточно, чтобы модуль вектора момента эквивалентной пары сил равнялся нулю.
Необходимо и достаточно, чтобы алгебраическая сумма проекции векторов моментов пар сил на каждую из 3-х координатных осей была равна нулю.
Лекция 5. Лекция 6. Системы сил. Знаем, что произвольная система сил может быть приведена к одной силе, равной главному вектору системы относительно центра приведения и приложенной в центре приведения и паре сил с моментом, равным главному моменту системы относительно центра приведения.
Модуль и направление главного вектора:
Модуль и направление главного момента.
Распределенные силы. В статике рассматриваются силы, приложенные в одной точке – так называемые сосредоточенные силы. В действительности силы обычно бывают приложены к какой-либо части объема тела или к его поверхности или линии, которые называют распределенными силами. Т.к. аксиомы и теоремы статики формулируются для сосредоточенных сил, необходимо знать способы перехода от распределенных сил к сосредоточенным. Распределенные силы характеризуются интенсивностью, т.е. силой приходящейся на единицу объема, площади или длины.
Параллельные силы постоянной интенсивности.
Параллельные силы с интенсивность, изменяющейся по линейному закону.
Теорема о моменте равнодействующей силы (теорема Вариньона).
К заданной системе сил добавим ее уравновешивающую силу
Получим в результате систему эквивалентную нулю, следовательно, можно записать условия равновесия, в частности, геометрическая сумма моментов сил этой новой системы относительно любой точки О равен нулю.
но получим
Если правую и левую часть этого выражения спроектировать на произвольную ось OZ, получим
Лекция 8. Законы трения скольжения. 1) При стремлении сдвинуть одно тело по поверхности другого в плоскости соприкосновения тел возникает сила трения ( или сила сцепления), величина которой может принимать любые значения от нуля до значения Fпред (Fпр), называемого предельной силой трения. Сила трения направлена в сторону, противоположную той, куда действующая сила стремятся сдвинуть тело. 2) Величина предельной силы трения равна произведению статического коэффициента трения на нормальное давление или нормальную реакцию.
3) Величина предельной силы трения в довольно широких пределах не зависит от размеров соприкасающихся при трении поверхностей. Объединяя вместе 1 и 2 законы трения, получим, что при равновесии сила трения покоя
Расчет ферм. Фермой называется геометрически неизменяемая шарнирно-стержневая конструкция. Если оси всех стержней лежат в одной плоскости, то такую ферму называют плоской.
С, D-опорные узлы
Все шарниры, соединяющие стержни фермы предполагаются идеальными, т.е. без трения, а все внешние силы – приложенными в узлах фермы, т.е. все стержни испытывают лишь растяжение или сжатие (вес стержней не учитывают). 1 способ расчета ферм – (определение опорных реакций и усилий - способ вырезания узлов в стержнях). Этот способ сводится к последовательному рассмотрению условий равновесия сил, сходящихся в каждом из узлов фермы. Мысленно вырезают узлы фермы, прикладывают к ним соответствующие внешние реакции и реакции стержней и составляют уравнения равновесия сил, приложенных к каждому узлу. Условно предполагают, что все стержни растянуты (реакции стержней направлены от узлов). Если в вычислениях получается знак «–», то соответствующий стержень сжат. Найденные реакции стержней равны по модулям внутренним усилиям в стержнях. Последовательность рассмотрения узлов определяется обычно условием, что число неизвестных сил, приложенных к узлу не должно превышать число уравнений равновесия.
Определим реакции опор:
2 способ расчета ферм: метод Риттера (метод сечений).
Метод Риттера удобно использовать для проверочных расчетов.
Лекция 9. Центр тяжести линии.
где
Лекция 1. Теоретическая механика - это наука, в которой изучаются общие законы движения и взаимодействия материальных тел. Механическим движением называется перемещение тела по отношению к другому телу, происходящее в пространстве и во времени. Механическим взаимодействием называется такое взаимодействие материальных тел, которое изменяет или стремится изменить характер их механического движения. Теоретическая механика состоит из трех разделов. Статика изучает методы преобразования системы сил в эквивалентные системы и изучает условия равновесия сил, приложенных к твердому телу. Кинематика изучает движение материальных тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение. Динамика изучает движение материальных тел в пространстве в зависимости от действующих на них сил. Приступая к изучению механики, следует определить ее основные понятия. Материальное тело - это тело, которое занимает какой-то объем в пространстве. Материальная точка – это материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать. Материальная точка обладает массой и способностью взаимодействовать с другими телами. Системой материальных точек или механической системой называется такая совокупность материальных точек, в которой положение и движение каждой материальной точки зависит от положения и движения других точек этой системы. Абсолютно твердым телом называют такое материальное тело, геометрическая форма и размеры которого, не изменяются ни про каких механических воздействиях со стороны других тел. Сила – это векторная физическая величина, которая характеризует механические взаимодействия материальных тел.
Сила равная по модулю равнодействующей и направленная в противоположную сторону называется уравновешивающей силой.
Силы, действующие на механическую систему, делятся на внешние и внутренние. Внешними называются силы, действующие на материальные точки данной системы со стороны материальных точек, не входящих в данную систему. Внутренними называются силы взаимодействия между материальными точками рассматриваемой системы. Аксиомы статики. 1) Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка движется равномерно прямолинейно или находится в состоянии покоя. 2) Аксиома равновесия двух сил. Две силы, приложенные к твердому телу взаимноуравновешиваются только в том случае, если их модули равны и они направлены в разные стороны по одной прямой.
4) Аксиома параллелограмма сил. Равнодействующая пересекающихся сил, приложенная в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах:
5) Аксиома действия и противодействия. Всякому действию соответствует равное и противоположно направленное противодействие.
В природе не существует одностороннего действия сил. Будучи противоположными к разным телам эти силы не уравновешиваются. 6) Аксиома сохранения равновесия сил, приложенных к деформирующемуся телу сохраняется при его затвердении. Из этой аксиомы следует, что условия равновесия сил, приложенных к абсолютно твердому телу, должны выполняться и для сил, приложенных к деформируемому телу. Однако эти условия необходимы, но недостаточны. Несвободное тело. Связи. Реакция связей. Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении. Тела, ограничивающие свободу движения твердого тела, являются по отношению к нему связью. Твердое тело, свобода движения которого ограничена связями, называется несвободным. Все силы, действующие на несвободное тело, наряду с внешними и внутренними, можно также разделить на задаваемые или активные силы и реакции связей. Задаваемые силы выражают действие на твердое тело других тел. Реакцией связи называется сила или система сил, выражающая механическое действие на тело. Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 903; Нарушение авторского права страницы

 Сила имеет модуль, направление и точку приложения. Прямая по которой направлена сила называется линией действия силы. Совокупность нескольких называется системой сил. системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии, называется эквивалентными системами. Сила, эквивалентная некоторой системе называется равнодействующей.
Сила имеет модуль, направление и точку приложения. Прямая по которой направлена сила называется линией действия силы. Совокупность нескольких называется системой сил. системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии, называется эквивалентными системами. Сила, эквивалентная некоторой системе называется равнодействующей. Дано: материальное тело А, на которое действует система сил
Дано: материальное тело А, на которое действует система сил 

 Система сил, которая будучи приложенной к твердому телу, находящемуся в покое не выводит его из состояния покоя, называется системой взаимноуравновешивающихся сил или системой 0.
Система сил, которая будучи приложенной к твердому телу, находящемуся в покое не выводит его из состояния покоя, называется системой взаимноуравновешивающихся сил или системой 0.

 0
0 3) Аксиома присоединения и исключения уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему взаимно уравновешивающих сил.
3) Аксиома присоединения и исключения уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему взаимно уравновешивающих сил.


 Следствие: не изменяя кинематического состояния твердого тела, силу можно переносить вдоль линии ее действия, сохраняя ее модуль и направление.
Следствие: не изменяя кинематического состояния твердого тела, силу можно переносить вдоль линии ее действия, сохраняя ее модуль и направление.
 и
и  взаимноуравновешивающиеся тогда, в т.В будет приложена к телу сила
взаимноуравновешивающиеся тогда, в т.В будет приложена к телу сила  . Сила – скользящий вектор.
. Сила – скользящий вектор. . Модуль равнодействующей:
. Модуль равнодействующей: 



 Геометрический способ сложения.
Геометрический способ сложения.  Направление равнодействующей силы
Направление равнодействующей силы 
 При помощи параллелограмма или треугольника сил можно решить и обратную задачу – разложить силу
При помощи параллелограмма или треугольника сил можно решить и обратную задачу – разложить силу  и
и  , приложенные в этой же точке и направленные по заданным линиям действия.
, приложенные в этой же точке и направленные по заданным линиям действия.





 Момент силы относительно точки.
Момент силы относительно точки.  .
. приложенным в этой точке и направленным перпендикулярно к плоскости, содержащей силу и точку, в такую сторону, чтобы, смотря навстречу этому вектору, видеть силу
приложенным в этой точке и направленным перпендикулярно к плоскости, содержащей силу и точку, в такую сторону, чтобы, смотря навстречу этому вектору, видеть силу  ,
, 
 , то
, то 
 , но
, но 
 , называются парой сил.
, называются парой сил.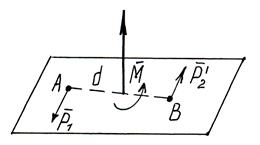 Плоскость, в которой находятся линии действия
Плоскость, в которой находятся линии действия  (Н/м)
(Н/м) пары
пары 
 (момент пары рассматривается как алгебраическая величина)
(момент пары рассматривается как алгебраическая величина) Докажем это для 3 пар. Даны 2 пары сил с моментами
Докажем это для 3 пар. Даны 2 пары сил с моментами  и
и  , лежащие в плоскостях I и II.
, лежащие в плоскостях I и II. момент
момент 
 момент
момент 
 .
.
 .
.

 пары
пары  заменяются одной парой
заменяются одной парой 

 а
а 



 , отсюда:
, отсюда:  - 0
- 0

 X, Y, Z-проекции главного вектора
X, Y, Z-проекции главного вектора
 X1…Xn, Y1…Yn, Z1…Zn-проекции сил на координатные оси
X1…Xn, Y1…Yn, Z1…Zn-проекции сил на координатные оси














 Теорема: момент равнодействующей системы сил относительно любой точки равен геометрической сумме моментов всех сил этой системы относительно той же точки. Момент равнодействующей силы относительно произвольной оси равен алгебраической сумме моментов сил системы относительно той же оси.
Теорема: момент равнодействующей системы сил относительно любой точки равен геометрической сумме моментов всех сил этой системы относительно той же точки. Момент равнодействующей силы относительно произвольной оси равен алгебраической сумме моментов сил системы относительно той же оси. На твердое тело действует произвольная система сил
На твердое тело действует произвольная система сил  , имеющая равнодействующую силу
, имеющая равнодействующую силу 
 .
.
 0.
0. ,
,  ,
, 



 -число отвлеченное, определяется опытным путем и зависит от материала поверхностей и состояния их.
-число отвлеченное, определяется опытным путем и зависит от материала поверхностей и состояния их. или
или 
 А, В-узлы фермы
А, В-узлы фермы Пример:
Пример: 
















 Ферму мысленно разделяют на 2 части сечением и рассматривают равновесие одной из частей (сечение проводят так, чтобы число неизвестных не превышало трех). Действие отброшенной части заменяют силами – реакциями соответствующих стержней, направляя их вдоль стержней от узла, т.е. считая стержни растянутыми.
Ферму мысленно разделяют на 2 части сечением и рассматривают равновесие одной из частей (сечение проводят так, чтобы число неизвестных не превышало трех). Действие отброшенной части заменяют силами – реакциями соответствующих стержней, направляя их вдоль стержней от узла, т.е. считая стержни растянутыми.





 ,
,  -длина проволоки,
-длина проволоки,  -вес единицы длины
-вес единицы длины

 - координаты центра тяжести линии
- координаты центра тяжести линии