|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теорема о II переносе силы. (Метод Пуансо)
т.О центр приведения
в т.О 2 уравновешивающие силы
Момент пары Совпадает не только модуль, но и направление момента силы относительно т.О Момент пары как свободный вектор может быть приложен в любой точки плоскости приложим его в т.О.
(Метод Пуансо (1777 -1850 г.г.) Приведение произвольной системы сил к заданному центру; Главный вектор, главный момент.
т. приложения Приведём их к произвольному центру О. Получим: 1). 3 силы 2). 3 приложенные пары
Складывая
Геометрическая сумма всех сил системы называетсяглавным вектором системы сил Складывая пары
Момент эквивалентной пары равен геометрической сумме моментов присоединенных пар.
Момент Распространяем полученные результаты на любое число сил:
Силы, произвольно расположенные в пространстве, можно привести к одной силе, равной их главному вектору, и приложенной в центре приведения, и к паре сил, с моментом, равным главному моменту всех сил относительно центра приведения. Выбор центра приведения не отражается на
Вычисление главного вектора и главного момента системы сил
Воспользуемся методом проекций.
X, Y – проекции главного вектора на оси координат.
Модуль и направление главного вектора определяются:
Все присоединенные пары сил лежат в одной плоскости.
– алгебраическая сумма моментов всех сил системы относительно центра приведения. Уравнения равновесия системы сил, Произвольно расположенной в плоскости. Если главный вектор системы сил и главный момент относительно центра приведения равны нулю, то силы взаимно уравновешиваются.
Можно записать:
Основные уравнения равновесия плоской системы сил:
Существуют и две другие системы уравнений равновесия сил: 1) 2)
Дана система параллельных сил: Приведем силы к произвольному центру О. Получим
т.к. X=0, то главный вектор направлен по оси OY
Главный вектор системы параллельных сил параллелен силам, его модуль равен абсолютному значению алгебраической суммы проекции сил на ось, параллельную силам, а его направление определяется знаком этой суммы.
Для системы параллельных сил на плоскости имеем 2 условия равновесия: 1)
На заделанный конец балки со стороны опорных плоскостей действует система распределенных сил реакций. Приводим их к центру А, заменив неизвестной
Лекция 6. Главный вектор и главный момент произвольной пространственной Системы сил. Знаем, что произвольная система сил может быть приведена к одной силе, равной главному вектору системы относительно центра приведения и приложенной в центре приведения и паре сил с моментом, равным главному моменту системы относительно центра приведения.
Модуль и направление главного вектора:
Модуль и направление главного момента.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 1012; Нарушение авторского права страницы

 и
и 




 , т. к.
, т. к.  0.
0. можно рассматривать как совокупность
можно рассматривать как совокупность  .
. .
. и момента пары
и момента пары  .
. 
 Таким образом, силу
Таким образом, силу  , не изменяя её действия на твёрдое тело можно перенести из точки её приложения А в любой центр приведения О, приложив при этом к телу пару сил с моментом
, не изменяя её действия на твёрдое тело можно перенести из точки её приложения А в любой центр приведения О, приложив при этом к телу пару сил с моментом  , геометрически равным моменту
, геометрически равным моменту  этой силы относительно центра приведения.
этой силы относительно центра приведения.
 произвольно расположенные силы
произвольно расположенные силы .
. приложены в т.О;
приложены в т.О;  .
. по правилу многоугольника, получим их равнодействующую
по правилу многоугольника, получим их равнодействующую  , равную их геометрической сумме.
, равную их геометрической сумме.
 .
.  получим эквивалентную им пару. Момент каждой присоединенной пары сил равен моменту соответствующей силы относительно центра приведения О.
получим эквивалентную им пару. Момент каждой присоединенной пары сил равен моменту соответствующей силы относительно центра приведения О.

 , равный геометрической сумме моментов сил данной системы относительно какой-либо точки, называется главным моментом системы сил относительно этой точки.
, равный геометрической сумме моментов сил данной системы относительно какой-либо точки, называется главным моментом системы сил относительно этой точки.
 , но влияет на модуль и направление главного момента.
, но влияет на модуль и направление главного момента. произвольно расположенных на плоскости.
произвольно расположенных на плоскости.  , т.О - центр приведения
, т.О - центр приведения
 , где Y1, Y2, Y3 и X1, X2, X3-проекции сил
, где Y1, Y2, Y3 и X1, X2, X3-проекции сил  на координатные оси.
на координатные оси.







 . Ось U не должна быть перпендикулярно прямой, проходящей через т.А и т.В.
. Ось U не должна быть перпендикулярно прямой, проходящей через т.А и т.В. . т.А, В, С не должны лежать на одной прямой.
. т.А, В, С не должны лежать на одной прямой.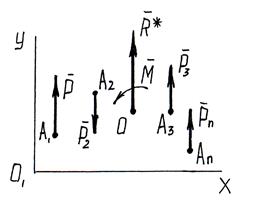 Уравнения равновесия параллельных сил.
Уравнения равновесия параллельных сил.  . Точки приложения: А1, А2…Аn.
. Точки приложения: А1, А2…Аn.
 ,
, 


 ;
;  - основное уравнение равновесия параллельных сил на плоскости (центр О выбран произвольно).
- основное уравнение равновесия параллельных сил на плоскости (центр О выбран произвольно).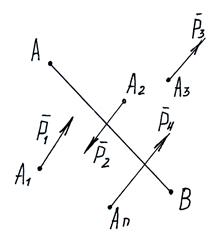 2)
2)  ;
;  - ограничение: прямая АВ не должна быть параллельна силам.
- ограничение: прямая АВ не должна быть параллельна силам.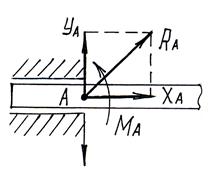 «Глухая заделка» («жесткая заделка»).
«Глухая заделка» («жесткая заделка»). и
и  . Надо определить: XA, YA, MA.
. Надо определить: XA, YA, MA.
 X, Y, Z-проекции главного вектора
X, Y, Z-проекции главного вектора
 X1…Xn, Y1…Yn, Z1…Zn-проекции сил на координатные оси
X1…Xn, Y1…Yn, Z1…Zn-проекции сил на координатные оси